Предплагаемое изобретение относится к области сельскохозяйственных машин и может быть использовано в различных конструкциях почвообрабатывающих агрегатах.
Известен культиватор КПС-4 (см. книгу Карпенко А.Н., Халанский В.Н. «Сельскохозяйственные машины»; 6-е изд. перераб. и доп. - М.: Агропромиздат, 1989 г.) описанный на стр. 54-56 и показанный на рис.11.6. этой книги. Конструкция такого культиватора предусматривает, что его рабочие органы жестко закреплены на стойках, выполненных из упругого материала и имеющих S-образную форму. Такое крепление рабочих органов более эффективно, т.к. за счет их упругих свойств можно получит более высокие агротехнические показатели обработки почвы и в случае контакта с инородными предметами избежать остаточных деформаций и поломок. Однако несмотря на достаточно высокую эффективность их использования, им присущ весьма важный недостаток, заключающийся в том, что изгибная жесткость S-образных форм стоек имеет постоянную величину, и поэтому последние предназначены для узкого культивирования почв, имеющих заранее заданную плотность и поэтому использовать их на других видах почв, где разброс плотности последних довольно широк на представляется возможным. Так, например, при высокой плотности почвы S-образной формы стойки получат более высокий угловой поворот, чем при обработке почв с меньшей плотностью, а это вызовет неравномерности обработки последней.
Известен также культиватор, конструкция которого признана изобретением (RU 2464757 С1, 27.10.2012). Такой культиватор содержит раму с жестко к ней присоединенными, с помощью S-образных пружинных подвесок, лапами, причем в S-образных пружинных подвесках, в продольной их плоскости, выполнены сквозные пазы и поперечно расположенные относительно них насечки, взаимодействующие с ответными изготовленными на криволинейной формы упорных пластинах, жестко присоединенных к втулкам подвижно установленным на пальцах шарнирно, связанных с рамой культиватора и также подвижно расположенных в упомянутых сквозных пазах S-образных пружинных подвесок, а втулки с криволинейной формы упорными пластинами подпружинены пружинами сжатия относительно пальцев, шарнирно связанных с рамой культиватора. Такая конструкция обеспечивает устойчивость движения рабочих органов в почвах, имеющих различную плотность за счет изменения изгибной жесткости S-образных пружинных подвесок. Несмотря на свою эффективность использования, указанная конструкция обладает существенным недостатком, заключающимся в том, что наличие сквозных пазов, выполненных в S-образных пружинных подвесках, способствует снижению усталостной прочности последних за счет возникновения высоких напряжений, создаваемых пазами, являющимися концентраторами.
Поэтому целью предлагаемого изобретения является повышение эффективности работы S-образных пружинных подвесок за счет не только возможности регулирования изгибной жесткости последних при эксплуатации культиватора на почвах, имеющих различную твердость, но и повысить надежность подвесок за счет исключения в них пазов.
Поставленная цель достигается тем, что на каждой S-образной пружинной подвеске подвижно установлен криволинейной формы ползун, жестко связанный с одной стороны с рукояткой перемещения ползуна, а с другой стороны также жестко соединен с пальцем, который подвижно расположен на оси, установленной в кронштейне, закрепленном на раме, причем палец снабжен кулачком, на круговой образующей поверхности которого выполнен ряд последовательно расположенных друг относительно друга углублений, взаимодействующих с телами качения сферической формы фиксатора, подпружиненного винтовой пружиной сжатия относительно упомянутой рамы культиватора.
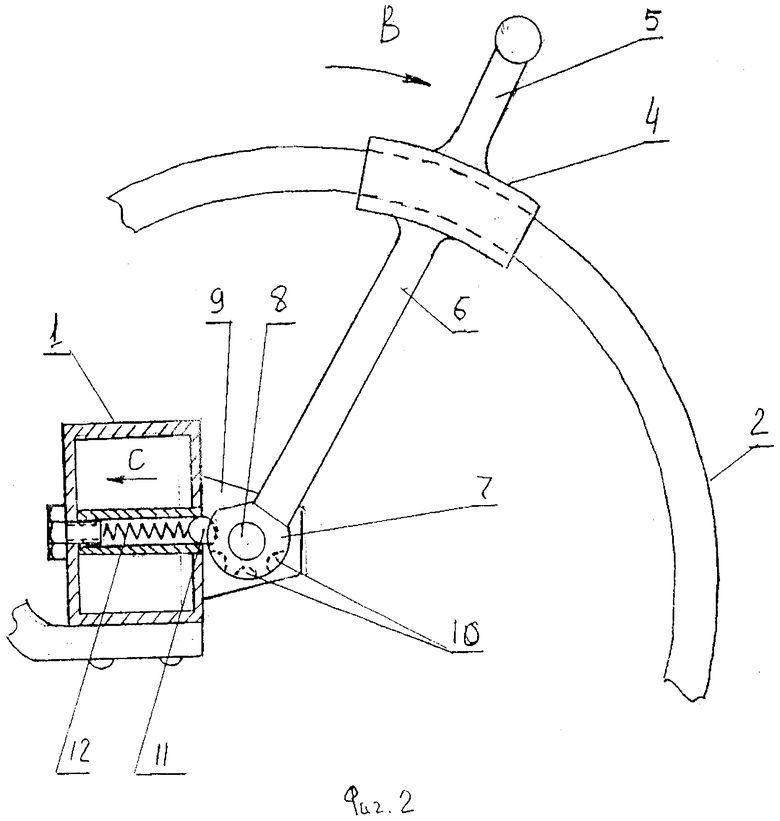
На чертежах фиг.1 показан общий вид S-образной пружинной подвески рабочего органа в перспективе, а на фиг.2 - в разрезе укрупненный узел фиксирующего устройства рабочей длины S-образной пружинной подвески.
Культиватор состоит из рамы 1, на которой жестко закреплена одним своим концом S-образная пружинная подвеска 2 с лапой 3. На S-образной пружинной подвеске 2 подвижно установлен криволинейной формы ползун 4 с жестко присоединенной к нему рукояткой 5. На криволинейной формы ползуне 4 также жестко установлен палец 6, снабженный кулачком 7, причем палец 6 подвижно расположен на оси 8, установленной в кронштейне 9, закрепленном на раме 1. В кулачке 7 выполнены углубления 10, взаимодействующие с телом качения сферической формы фиксатора 11, подпружиненного винтовой пружиной сжатия относительно рамы 12.
Работает культиватор следующим образом: при обработке почвы рабочим органом (лапа 3) на нее действует нагрузка Р, возникающая от преодоления последним почвы, в которую он и заглублен. Для упрощения задачи считаем, что такая нагрузка является постоянной, т.е. Р=const, и не вызывает упругой деформации S-образной пружинной подвески 2, при этом лапа 3 находится на заданном углублении в почве и двигается совместно с рамой 1 культиватора достаточно устойчиво. Предположим теперь, что это нагрузка увеличилась в связи с тем, что культиватор стал обрабатывать почву с плотностью, намного большей, чем в первом случае, и настолько, что она вызвала угловую упругую деформацию S-образной пружинной подвески 2 по стрелке А, причем такая угловая деформация, связанная с перемещением лапы 3 в левую часть фиг. 1, что тем самым исключает заданный технологический процесс резания почвы, переходящий в процесс ее отвала. Такое явление вызвано малой жесткостью участка S-образной пружинной подвески 2, расположенного между точкой приложения нагрузки Р и местом заделки ее на раме 1 культиватора. Известно, что такая деформация наступила от действия критической силы PКР, которая определяется по известной зависимости (см. книгу Феодосьев В.И. «Сопротивление материалов», М.: Наука 1970 г., стр.417-422 раздела «Большие перемещения гибкого стержня»):
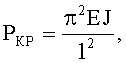
где: EJ - жесткость поперечного сечения гибкого стержня;
l - длина рассматриваемого участка гибкого стержня.
Из этой зависимости видно, что одним из важнейших ее показателей является длина стержня l, т.е. чем она меньше, тем значение PКР больше при тех же параметрах Е и J. Поэтому в предложенном техническом решении и использован этот принцип за счет изменения рабочей длины S-образной пружинной подвески 2 следующим образом. Если культиватор эксплуатируется на более плотных почвах, то за счет перемещения вручную по стрелке B (см. фиг.1 и фиг.2) рукоятки 5 совместно с криволинейной формы ползуна 4, при этом палец 6 также получает угловой поворот на оси 8 в этом же направлении. При этом кулачок 7, также получив угловой поворот, отжимает по стрелке С тело качения сферической формы фиксатора 11, одновременно упруго деформируя винтовую пружину сжатия 12 в этом же направлении. Но так как угловой поворот криволинейной формы ползуна 4 продолжается, то тело качения сферической формы фиксатора 11 войдет в контакт с другим углублением 10, что позволит зафиксировать криволинейной формы ползун 4 уже в этом новом положении. Это в итоге позволяет уменьшить рабочую длину S-образной пружинной подвески 2 и тем самым повысить ее сопротивление воздействию силы P, приложенной к лапе 3 культиватора. Осуществляя описанную операцию поворота криволинейной формы ползуна 4 на различные углы в зависимости от плотности обрабатываемых почв, можно получить требуемую устойчивость движения лапы 3 культиватора и тем самым обеспечить качество обрабатываемых угодий. При этом ход криволинейной формы ползуна 4 может быть выполнен значительно большим и в каждом конкретном случае может быть установлен экспериментальным путем.
Технико-экономическое преимущество предложенного технического решения в сравнении с известными очевидно, т.к. оно позволяет расширить эксплуатационные показатели культиватора, работающего на различных почвах, имеющих разную плотность.
| название | год | авторы | номер документа |
|---|---|---|---|
| КУЛЬТИВАТОР | 2011 |
|
RU2464757C1 |
| КУЛЬТИВАТОР | 2013 |
|
RU2535388C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ГЛУБИНЫ ОБРАБОТКИ S-ОБРАЗНОЙ ЛАПЫ КУЛЬТИВАТОРА И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2008 |
|
RU2383119C1 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
| Культиватор | 2016 |
|
RU2641524C2 |
| КУЛЬТИВАТОР | 2014 |
|
RU2544618C1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДПОСЕВНОЙ ОБРАБОТКИ ПОЧВЫ | 2017 |
|
RU2661370C1 |
| КУЛЬТИВАТОР НА УПРУГИХ СТОЙКАХ | 2008 |
|
RU2382538C2 |
| Устройство для забивки клиньев | 1981 |
|
SU967657A1 |
Изобретение относится к области сельскохозяйственных машин. Культиватор содержит раму с S-образными пружинными подвесками, снабженными лапами. На каждой S-образной пружинной подвеске подвижно установлен криволинейной формы ползун. Ползун жестко связан с одной стороны с рукояткой перемещения ползуна, а с другой стороны также жестко соединен с пальцем. Палец подвижно расположен на оси, установленной в кронштейне. Кронштейн закреплен на раме. Палец снабжен кулачком, на круговой образующей поверхности которого выполнен ряд последовательно расположенных друг относительно друга углублений, взаимодействующих с телами качения сферической формы фиксатора. Фиксатор подпружинен винтовой пружиной сжатия относительно упомянутой рамы культиватора. Такое конструктивное выполнение позволит повысить устойчивость движения рабочего органа культиватора в почве независимо от ее плотности. 2 ил.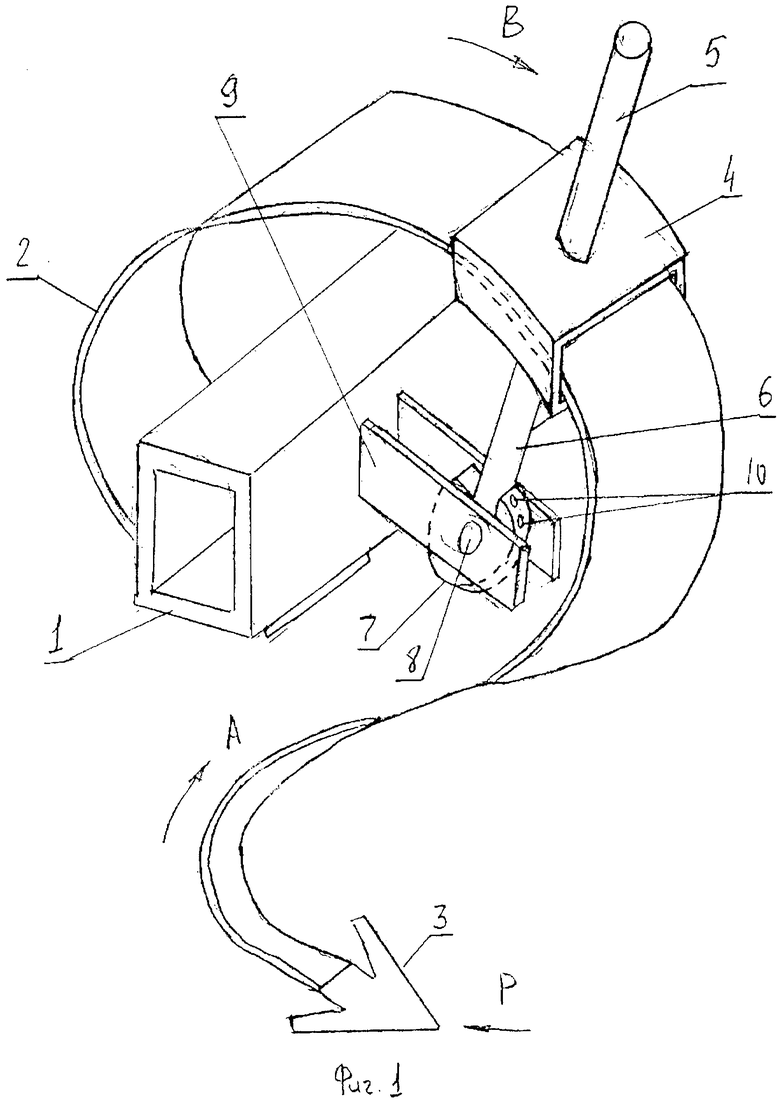
Культиватор, содержащий раму с S-образными пружинными подвесками, снабженными лапами, отличающийся тем, что на каждой S-образной пружинной подвеске подвижно установлен криволинейной формы ползун, жестко связанный с одной стороны с рукояткой перемещения ползуна, а с другой стороны также жестко соединен с пальцем, который подвижно расположен на оси, установленной в кронштейне, закрепленном на раме, причем палец снабжен кулачком, на круговой образующей поверхности которого выполнен ряд последовательно расположенных друг относительно друга углублений, взаимодействующих с телами качения сферической формы фиксатора, подпружиненного винтовой пружиной сжатия относительно упомянутой рамы культиватора.
| КУЛЬТИВАТОР | 2011 |
|
RU2464757C1 |
| Гидрофобная добавка к массе керамического огнеупора | 1957 |
|
SU116303A1 |
| КУЛЬТИВАТОР НА УПРУГИХ СТОЙКАХ | 2008 |
|
RU2382538C2 |
| Станок для формования бетонных пустотелых или сплошных камней | 1925 |
|
SU6719A1 |
| DE 10341757 A1, 14.04.2005 | |||

