Изобретение относится к промышленным и сельскохозяйственным тракторам, бульдозерам, погрузчикам, автогрейдерам и другим гусеничным и колесным самоходным рабочим машинам с электромеханической или гидростатической трансмиссией, предназначенным для выполнения землеройных, строительных, дорожных, сельскохозяйственных и других работ.
Известна моторно-трансмиссионная установка (МТУ) промышленного трактора с электрической силовой передачей, содержащая двигатель внутреннего сгорания (ДВС), силовой генератор с блоком возбуждения, тяговый электромотор, соединенный с главной передачей и бортовыми редукторами, и систему контроля, управления и сигнализации [1], [2].
Известна также МТУ гусеничного трактора, содержащая ДВС, силовой генератор, два тяговых электромотора и блок управления, размещенные в раме трактора, и бортовые редукторы. Каждый тяговый электромотор выполнен в едином блоке с бортовым редуктором и расположен на единой поперечной оси с ним и ведущим колесом ходовой части трактора [3].
Кроме того, известна МТУ гусеничного бульдозера с гидростатической силовой передачей, содержащая ДВС, три гидронасоса, два из которых выполнены регулируемыми реверсивными аксиально-поршневыми и образуют гидроконтуры с соответствующими гидромоторами, связанными с бортовыми редукторами, снабженными тормозами, а третий гидронасос через распределительное устройство образует гидроконтур с гидроцилиндрами рабочего оборудования, причем все гидроконтуры выполнены автономными, а сами гидронасосы установлены последовательно на одном валу с ДВС [4].
Недостатком указанных МТУ [1], [2], [3] и [4] является пониженная надежность ДВС и повышенный расход топлива, что обусловлено отсутствием сглаживания динамических нагрузок на ДВС в переходных режимах его работы и при колебаниях тягового усилия рабочей машины.
Наиболее близкой к предложенной является МТУ самоходной рабочей машины с электрической силовой передачей, включающей в себя ДВС, соединенный с ним генератор, выполненный с возможностью преобразования по меньшей мере части механической энергии ДВС в электрическую энергию, по меньшей мере один электромотор, соединенный силовыми шинами с генератором и выполненный с возможностью передачи крутящего момента на множество элементов привода хода, включая бортовые редукторы, и по меньшей мере один контроллер (силовой электронный модуль), выполненный с возможностью управления ДВС, генератором и/или электромотором. К силовым шинам подключена система накопления электрической энергии, реализованная на основе аккумуляторной батареи, суперконденсаторов или маховика с электрическим приводом, предназначенная для реализации регенеративного торможения, сохранения избыточной электрической энергии генератора и/или для предоставления дополнительной электроэнергии, используемой при запуске ДВС и/или во время работы машины [5].
Применение накопителя энергии в силовой цепи МТУ позволяет снизить нагрузки на ДВС в переходных режимах его работы и при колебаниях тягового усилия рабочей машины, что обеспечивает снижение удельного расхода топлива и повышение надежности МТУ.
Однако применение накопителя энергии в виде отдельного устройства, подключаемого к силовым шинам генератора, проводит к ухудшению массогабаритных характеристик МТУ. Это обусловлено относительно невысокой плотностью энергии таких накопителей. Например, у наиболее распространенных накопителей энергии - электрохимических аккумуляторов, плотность энергии (удельная энергоемкость) составляет от 30-60 Вт·ч/кг для свинцово-кислотных до 110-130 Вт·ч/кг для литий-ионных аккумуляторов.
Поэтому накопители энергии для МТУ землеройно-транспортных и других рабочих машин, рабочие процессы которых характеризуются повышенной амплитудой и частотой колебаний тяговых усилий, имеют большие габаритные размеры и массу.
Кроме того, применение в МТУ накопителя энергии с электрическим входом/выходом возможно только на рабочих машинах с электромеханической силовой передачей.
Основным техническим результатом, на достижение которого направлено изобретение во всех вариантах его исполнения, является улучшение массо-габаритных характеристик МТУ.
Дополнительным техническим результатом является обеспечение возможности применения МТУ на рабочих машинах с гидростатическими силовыми передачами.
В МТУ рабочей машины, содержащей ДВС, по меньшей мере один генератор или гидронасос, функционально соединенный с ДВС и преобразующий по меньшей мере часть механической энергии ДВС в электрическую или гидравлическую энергию, бортовые редукторы, связанные с ведущими колесами или гусеницами машины, по меньшей мере один электромотор или гидромотор привода хода рабочей машины, приспособленный для преобразования электрической или гидравлической энергии в механическую энергию, причем бортовые редукторы непосредственно или по меньшей мере через одно передаточное устройство связаны по меньшей мере с одним электромотором или гидромотором привода хода, указанные технические результаты достигаются за счет того, что с помощью одного или нескольких указанных генераторов или гидронасосов осуществляется преобразования кинетической энергии по меньшей мере одной вращающейся части ДВС, генератора или гидронасоса в электрическую или гидравлическую энергию, а ДВС имеет номинальный коэффициент запаса крутящего момента не менее 25% и/или по меньшей мере к одной вращающейся части ДВС, генератора или гидронасоса, прикреплен маховик, момент инерции которого возрастает с увеличением скорости его вращения.
В частных вариантах реализации изобретения, с целью достижения указанных технических результатов, а также для дальнейшего улучшения характеристик МТУ, в ней дополнительно:
- генератор, гидронасос или группа этих генераторов или гидронасосов, имеет/имеют мощность или суммарную мощность, обеспечивающую возможность преобразования в электрическую или гидравлическую энергию не только механической энергии ДВС, но и кинетической энергии по меньшей мере одной вращающейся части ДВС, электрического генератора или гидронасоса;
- по меньшей мере один генератор или гидронасос функционально соединен с ДВС через повышающий редуктор и/или упругую муфту;
- МТУ дополнительно содержит контроллер, осуществляющий управление ДВС и/или по меньшей мере одним генератором или гидронасосом из условия достижения предварительно установленной или максимальной выходной мощности по меньшей мере одного генератора или гидронасоса и/или из условия обеспечения заданной величины его выходного напряжения или тока, либо расхода или давления рабочей жидкости;
- по меньшей мере один генератор размещен в герметичной вакуумной камере и соединен с ДВС через повышающий редуктор, и/или магнитную муфту, и/или управляемую электромагнитную муфту, причем управление этой электромагнитной муфтой и ДВС осуществляется, в частности, от дополнительно установленного контроллера из условия достижения предварительно установленной или максимальной выходной мощности и/или заданной величины выходного напряжения или тока по меньшей мере одного генератора;
- по меньшей мере один генератор или гидронасос выполнен с повышенным моментом инерции и/или по меньшей мере к одной его вращающейся части прикреплен маховик;
- по меньшей мере один генератор имеет ротор, расположенный снаружи статора и соединенный с ДВС через повышающий редуктор и/или муфту;
- по меньшей мере один генератор или гидронасос, а также по меньшей мере один электромотор или гидромотор привода хода, выполнены обратимыми с возможностью преобразования кинетической энергии рабочей машины в электрическую или гидравлическую энергию и ее последующего преобразования в кинетическую энергию по меньшей мере одной вращающейся части ДВС, генератора и/или гидронасоса;
- генератор или гидронасос, либо несколько генераторов или гидронасосов, приспособлен/приспособлены для преобразования механической энергии ДВС в электрическую или гидравлическую энергию и последующей передачи этой энергии по меньшей мере на один электромотор или гидромотор привода рабочего оборудования и/или вала отбора мощности рабочей машины;
- МТУ имеет дополнительный генератор или гидронасос, выполненный с возможностью преобразования части механической энергии ДВС в электрическую или гидравлическую энергию и передачи этой энергии по меньшей мере на один электромотор или или гидромотор привода рабочего оборудования и/или вала отбора мощности рабочей машины;
- по меньшей мере один генератор или электромотор выполнен в виде синхронной электрической машины с постоянными магнитами, вентильно-индукторной или асинхронной электрической машины;
- МТУ оснащена электрическим соединителем, подключенным к генератору, обеспечивающему питание внешних потребителей рабочей машины;
- МТУ оснащена электрическим модулем, с помощью которого осуществляется ее подключение по электрическому кабелю к внешней трехфазной электрической сети с напряжением 220/380 В переменного тока, а также преобразование и передача электрической энергии этой внешней сети по меньшей мере на один электромотор из условия использования этой энергии при работе машины;
- генератор выполнен с возможность работы в режиме электромотора и приспособлен для запуска соединенного с ним ДВС от внешней электрической сети, подключаемой с использованием электрического кабеля, или по меньшей мере от одного электромотора привода хода рабочей машины, и/или рабочего оборудования, и/или вала отбора мощности рабочей машины, выполненного с возможностью работы в режиме генератора;
- гидронасос выполнен с возможность работы в режиме гидромотора и приспособлен для запуска соединенного с ним ДВС по меньшей мере от одного гидромотора привода хода рабочей машины, рабочего оборудования и/или вала отбора мощности рабочей машины, выполненного с возможностью работы в режиме гидронасоса, или от внешней насосной станции;
- бортовые редукторы выполнены обратимыми с возможностью приведения во вращение по меньшей мере одного электромотора или гидромотора привода хода при буксировке рабочей машины или при ее движении под уклон;
- по меньшей мере один электромотор или гидромотор или соединенный с ним бортовой редуктор оснащен нормально замкнутым стояночным тормозом, приспособленным для создания тормозного момента в случае поступления на этот тормоз внешнего сигнала управления и/или в случае снижения электрического напряжения на электромоторе или давления на гидромоторе до предварительно установленной величины;
- по меньшей мере один генератор или электромотор выполнен с жидкостным охлаждением и имеет, в частности, систему жидкостного охлаждения, объединенную с системой охлаждения ДВС;
- МТУ содержит аппарат управления движением рабочей машины и контроллер, соединенные между собой, причем контроллер приспособлен для управления ДВС, и/или по меньшей мере одним генератором, гидронасосом, электромотором или гидромотором привода хода рабочей машины, таким образом, чтобы скорость движения рабочей машины поддерживалась в соответствии с величиной скорости, заданной аппаратом управления, если мощности ДВС достаточно для поддержания этой скорости при текущем значении тяговой нагрузки рабочей машины, либо из условия достижения максимальной тяговой мощности рабочей машины, если при текущей величине ее нагрузки мощности ДВС недостаточно для поддержания заданной аппаратом управления скорости движения рабочей машины;
- МТУ оснащена дополнительным электрическим, электромеханическим или гидравлическим накопителем энергии, соединенным по меньшей мере с одним генератором, гидронасосом, электромотором или гидромотором;
- передаточное устройство выполнено в виде дифференциального устройства, которое соединено с электромотором или гидромотором привода рабочего хода и бортовыми редукторами и выполнено с возможностью перераспределения крутящего момента, передаваемого на каждый бортовой редуктор, причем дифференциальное устройство оснащено дополнительным электромотором или гидромотором, приспособленным для указанного перераспределения крутящего момента в зависимости от сигнала управления поворотом рабочей машины;
- передаточное устройство содержит главную передачу, выходы которой соединены с бортовыми редукторами с использованием бортовых фрикционов;
- МТУ содержит один генератор или два гидравлических насоса, а также два электромотора или гидромотора, каждый из которых функционально соединен с соответствующим бортовым редуктором.
Из уровня техники известны различные МТУ с накопителями энергии, выполненными в виде автономных устройств и обеспечивающими как торможение машин с рекуперацией энергии, так и сглаживание колебаний крутящего момента ДВС. В предложенной МТУ, в отличие от известных технических решений, для накопления энергии используются не дополнительно установленные устройства, а те детали, узлы и агрегаты, которые уже имеются в МТУ.
Для реализации такой возможности МТУ должна иметь конструктивные особенности, описанные отличительными признаками независимого пункта формулы изобретения. К ним относятся исполнение генератора или гидронасоса (генераторов, гидронасосов) с возможностью преобразования в электрическую или гидравлическую энергию не только механической энергии ДВС, но и кинетической энергии вращающихся частей ДВС, генератора или гидронасоса, а также применение ДВС с высоким значением номинального коэффициента запаса крутящего момента (применение двигателя постоянной мощности), либо установка дополнительного маховика, момент инерции которого возрастает с увеличением скорости его вращения.
Обусловлено это тем, что процесс накопления кинетической энергии, а также ее передачи в силовую передачу, сопровождается изменением скорости вращения тех деталей МТУ, которые используются для такого накопления. Поэтому принципиально необходимо либо обеспечить работу ДВС в широком диапазоне скоростей, либо применить маховик с переменным моментом инерции, что и предложено в данном изобретении.
Для дальнейшего улучшения характеристик МТУ предложены различные алгоритмы управления ее узлами и агрегатами, меры по увеличению момента инерции вращающихся деталей и по обеспечению эффективной работы генератора или гидронасоса при изменяющейся угловой скорости ДВС, а также другие технические решения, описанные в зависимых пунктах формулы изобретения.
Поэтому как альтернативные отличительные признаки независимого пункта, так и признаки зависимых пунктов формулы данного изобретения, при их реализации в различных комбинациях (сочетаниях), обеспечивают достижение одного и того же технического результата - позволяют улучшить массогабаритные характеристики МТУ и обеспечить возможность ее применения на машинах с различными силовыми передачами.
На чертеже приведен пример реализации МТУ рабочей машины с электромеханической силовой передачей.
МТУ содержит двигатель внутреннего сгорания (ДВС) 1, силовой генератор 2, а также и электромоторы 3, 4 и бортовые редукторы 5, 6 привода хода, связанные с ведущими колесами или гусеницами 7, 8 рабочей машины.
Максимальная мощность генератора 2 выбрана с необходимым запасом таким образом, чтобы он обеспечивал возможность преобразования в электрическую энергию механической энергии не только ДВС 1, но и кинетической энергии связанных с ним вращающихся частей ДВС и самого генератора 2.
В предложенной МТУ используется двигатель (ДВС) постоянной мощности (ДПМ), имеющий номинальный коэффициент запаса крутящего момента не менее 25% (предпочтительно более 40%). Под ДПМ в данном случае подразумевается ДВС, конструкция которого обеспечивает при положении органов управления регулятора частоты вращения, соответствующем полной подаче топлива, получение мощности, равной номинальной или выше номинальной не более чем на 7%, в диапазоне изменения частоты вращения не менее чем от номинальной до 75% номинальной.
В качестве альтернативы, либо в качестве дополнения к применения ДПМ, в МТУ может использоваться маховик с переменным моментом инерции, прикрепленный к какой-либо вращающейся части ДВС 1 или генератора 2. Конструктивно он выполнен таким образом, что момент инерции этого маховика возрастает с увеличением скорости его вращения (примеры таких маховиков: RU 2147700, RU 2265761, US 7594871).
Перспективно применение супермаховиков, состоящих из витков стальной ленты, проволоки или высокопрочного синтетического волокна с неплотной навивкой (со специально оставленным пустым пространством). В этом случае по мере раскручивания маховика витки ленты перемещаются от его центра к периферии вращения, изменяя момент инерции маховика, а если лента пружинная, то и запасая часть энергии в энергии упругой деформации пружины. В таких маховиках, в отличие от цельнотельных, скорость вращения меньше зависит от накопленной энергии.
В предложенной МТУ вращающиеся части ДВС 1 и генератора 2 используются в качестве маховичного (гироскопического) накопителя энергии. Поэтому эти части выполнены, предпочтительно, с повышенным моментом инерции, в частности, за счет дополнительного прикрепления к ним инерционных масс.
С этой целью генератор 2 может быть выполнен с ротором, расположенным снаружи статора, что приводит к увеличению его момента инерции.
Для достижения высокой скорости вращения и, соответственно, увеличения накопленной кинетической энергии ротора генератора, от может быть размещен в герметичной вакуумной камере и соединен с ДВС 1 через повышающий редуктор 24 (мультипликатор), а также магнитную или электромагнитную муфту (на чертеже условно не показана), управляемую от дополнительно установленного контроллера.
На чертеже показан пример МТУ с одним генератором 2 и двумя электромоторами 3, 4, обеспечивающими раздельный привод левого и правого борта рабочей машины.
В случае применения в МТУ одного электромотора дополнительно устанавливается главная передача, бортовые фрикционы, дифференциальное или иное передаточное устройство для механического соединения этого электромотора с бортовыми редукторами и перераспределения крутящего момента, передаваемого на каждый бортовой редуктор в зависимости от сигнала управления поворотом рабочей машины. Управление перераспределением этого момента в дифференциальном передаточном устройстве (дифференциале) может осуществляться с помощью дополнительного электромотора или гидромотора.
Силовой генератор 2, тяговые электромоторы 3, 4 и связанные с ними электронные и механические устройства могут быть выполнены в общих корпусах в виде генераторного мехатронного модуля 9 и тяговых мехатронных модулей 10, 11, соединенные между собой силовыми шинами 12.
Для ручного и/или автоматизированного управления МТУ на рабочей машине установлены органы управления 13, панель оператора 14, датчики параметров работы МТУ 15, контроллер трансмиссии 16 и контроллер 17 ДВС.
Генераторный 9 и тяговые 10, 11 мехатронные модули содержат электронные силовые преобразователи 18, 19, 20 и микропроцессорные контроллеры 21, 22 и 23 этих модулей. Генератор 2 генераторного модуля 9 механически соединен с ДВС непосредственно, через повышающий редуктор (мультипликатор) 24 и/или упругую муфту.
Мехатронные модули 9, 10, 11, органы управления 13, панель оператора 14, контроллер трансмиссии 16, контроллер 17 ДВС и другие устройства МТУ, содержащие микропроцессорные контроллеры (микроконтроллеры), соединены между собой шиной последовательной цифровой передачи данных, выполненной, в частности, с физическим уровнем промышленной сети CAN (Controller Area Network), определенным в стандарте ISO 11898, и протокола высокого уровня CANopen, или DeviceNet, или CAN Kingdom, или J1939. Возможно также применение интерфейса цифровой передачи данных LIN (Local Interconnect Network - интерфейс для автомобильных систем), J1850 (SAE), CarLink, VAN, Α-bus, RS-232C (COM - порт), RS-485 (Recommended Standard 485), «токовая петля», MIDI, MicroLAN, Ethernet, USB и т.д.
Каждый из органов управления 13 выполнен в виде джойстика, аппарата управления, пульта или переключателя и предназначен для формирования сигналов управления запуском и остановкой ДВС, а также скоростью и/или направлением движения рабочей машины. Он содержит, например, механический приводной элемент (рукоятку, рычаг), датчик положения этого элемента и микроконтроллер, осуществляющий обработку выходных сигналов этого датчика. В частности, орган управления 13 может быть выполнен в виде джойстика с магниточувствительным датчиком положения его рукоятки, соединенным с микроконтроллером, который формирует сигналы управления движением рабочей машины вперед/назад и ее поворота влево/вправо при отклонении оператором рукоятки джойстика соответственно вперед/назад и влево/вправо.
Панель оператора 14 содержит графические, символьные и/или электромеханические (стрелочные) устройства, предназначенные для отображения информации о параметрах и режимах работы МТУ, а также звуковые и/или световые сигнализаторы их предельных состояний. На панели оператора 14 могут быть установлены органы управления этой панелью, использующиеся, например, для переключения отображаемых параметров, а также отдельные (вспомогательные, сервисные, дублирующие) органы управления МТУ, выполненные, например, в виде клавиш и кнопок.
В зависимости от выполняемых функций и компоновки МТУ на машине возможно как объединение отдельных электронных устройств, в том числе контроллеров, в единый блок (модуль), так и их раздельное исполнение.
МТУ может содержать также дополнительный (вспомогательный) накопитель электрической энергии 25, выполненный, например, в виде батареи аккумуляторов, суперконденсаторов или гироскопического электромеханического устройства, и тормозной резистор 26, подключенные к силовыми шинам 12.
Тормозной резистор 26 содержит, в частности, силовой резистивный элемент, предназначенный для поглощения энергии торможения рабочей машины, и электронный ключ, осуществляющий подключение этого резистора к силовым шинам 12 в зависимости от напряжения на этих шинах. Управление электронным ключом может также осуществляться по шины CAN.
В качестве датчиков 15 могут использоваться датчики крутящего момента или угловой скорости ДВС или какого-либо вала МТУ, температуры окружающей среды, температуры охлаждающей жидкости, датчик присутствия оператора в кресле или в кабине рабочей машины, используемый для блокирования работы МТУ при отсутствии оператора, и другие датчики, необходимость установки которых определяется особенностями конструкции рабочей машины и технологического процесса, для выполнения которого она предназначена. Датчики 15 могут быть подключены не только к шине CAN, но и непосредственно к контроллеру трансмиссии 16, панели оператора 14, контроллеру 17 ДВС или к мехатронным модулям 9, 10, 11.
Генераторный и тяговые мехатронные модули 9, 10, 11 и тормозной резистор 26 могут иметь обитую систему жидкостного охлаждения 27 (на чертеже условно показаны трубопроводы с теплоносителем), объединенную с системой охлаждения ДВС 1.
Генераторный мехатронный модуль 9 выполнен обратимым - с возможностью его работы в качестве электромотора. Благодаря этому обеспечивается возможность торможения рабочей машины двигателем внутреннего сгорания (ДВС) 1, а также запуска ДВС от внешней электрической сети, подключаемой с использованием электрического кабеля (на чертеже условно не показан).
Генератор 2 и электромоторы 3, 4 могут быть вентильно-индукторными (вентильными индукторно-реактивными) с пассивным ферромагнитным ротором (без постоянных магнитов и обмоток на роторе), именуемыми в зарубежной технической литературе как «Switched Reluctance Motor» (SRM), синхронными с постоянными магнитами на роторе, именуемыми в зарубежной технической литературе как «Permanent Magnet Synchronous Motor» (PMSM) (реже используется название «BrushLess Direct Current motor» (BLDC), что переводится, как «Бесщеточный мотор постоянного тока»), или асинхронными.
Каждый из тяговых мехатронных модулей 10, 11 может содержать встроенный электромагнитный стояночный тормоз 28, 29. В этом случае силовой преобразователь 19, 20 содержит электронный ключ, соединенный с контроллером 22, 23 и обеспечивающий управление включением/отключением этого тормоза в зависимости от сигнала, поступающего по шине CAN. Возможна также реализация контроллером 22, 23 алгоритма автоматического включения этого тормоза через установленный интервал времени после остановки вала электромотора 3, 4.
Бортовые редукторы 5, 6 выполнены обратимыми с возможностью приведения во вращение роторов электромоторов 3, 4 при замедлении, буксировке рабочей машины или при ее движении под уклон. В этом случае электромоторы работают в режиме генераторов, обеспечивая возможность торможения самоходной машины и накопления кинетической энергии во вращающихся деталях ДВС 1, генератора 2, маховика (при его наличии) и в дополнительном накопителе энергии 25 (при его наличии).
Если рабочая машина имеет привод рабочего оборудования и/или вала отбора мощности (ВОМ), то электрическая энергия для его работы может быть получена как от генератора 2, так и от дополнительного генератора, соединенного с ДВС 1.
МТУ может быть оснащена электрическим соединителем, подключенным к генератору 2, который в этом случае обеспечивает питание внешних потребителей рабочей машины. Через этот соединитель и электрический кабель на рабочую машину может подаваться электрическая энергия внешней трехфазной электрической сети 220/380 В переменного тока. Это напряжение через дополнительный электрический модуль, выполненный, например, в виде трехфазного мостового выпрямителя, поступает на силовые шины 12 и далее может использоваться для запуска ДВС 1 и при работе машины.
Если в МТУ используется не электромеханическая, а гидростатическая силовая передача с закрытым (замкнутым) или открытым контуром, то вместо электрических генераторов используются гидравлические насосы, а вместо электромоторов - гидромоторы. В этом случае вместо электрической энергии и мощности рассматривается гидравлическая, вместо электрического тока - поток рабочей жидкости, а вместо электрического напряжения - давление этой жидкости. Общие принципы построения предложенной МТУ при этом не изменяются.
В частности, возможно построение МТУ с одним гидронасосом и одним гидромотором и главной передачей, либо с одним гидронасосом и двумя гидромоторами, либо с двумя гидронасосами, соединенными гидравлическими линиями с гидромоторами левого и правого борта рабочей машины. Силовые преобразователи 18, 19 и 20 в этом случае осуществляют регулирование тока пропорциональных электромагнитов гидромашин, а стояночные тормоза 28 и 29 имеют электрогидравлическое управление.
МТУ рабочей машины работает следующим образом.
ДВС 1 непосредственно, через упругую муфту и/или через повышающий редуктор (мультипликатор) 24 приводит во вращение ротор генератора 2 генераторного мехатронного модуля 9. Силовой преобразователь 18, реализованный с использованием диодов или силовых IGBT транзисторов, управляемых контроллером 21, выполняет функции выпрямителя. Если генератор 2 выполнен вентильно-индукторным с независимым возбуждением, то с помощью силового преобразователя 18 и контроллера 21 осуществляется регулирование тока возбуждения генератора 2.
Напряжение постоянного тока, например с номинальным рабочим напряжением 550 В, с выхода генераторного мехатронного модуля 9 по силовым шинам 12 поступает на тяговые мехатронные модули 10, 11, накопитель энергии 25 (при его наличии) и управляемый тормозной резистор 26.
Электромоторы 3, 4, получающие электрическую энергию от силовых преобразователей 19, 20, преобразуют ее в механическую энергию и передают вращающий момент на бортовые редукторы 5, 6 и далее на ведущие колеса или звездочки 7, 8, обеспечивая движение рабочей машины.
Режимы работы генераторного 9 и тяговых 10, 11 мехатронных модулей устанавливаются в зависимости от информационных сигналов, присутствующих в шине последовательной цифровой передачи данных CAN, либо самостоятельно контроллерами этих модулей.
Во время работы машины скорость ее движения устанавливается оператором (машинистом) с помощью органов управления 13. Если мощности ДВС достаточно для поддержания этой скорости при текущем значении тяговой нагрузки рабочей машины, то машина движется с заданной скоростью.
При увеличении тяговой нагрузки возрастает необходимый крутящий момент электромоторов 3, 4. Если этот момент не может быть реализован при заданной скорости вращения их роторов, то контроллеры 22, 23 осуществляют управление силовыми преобразователями 19, 20 из условия снижения скорости вращения роторов электромоторов при одновременном повышении их крутящего момента.
При уменьшении тягового усилия рабочей машины контроллеры 22, 23 автоматически увеличивают скорость вращения роторов электромоторов 3, 4. При этом скорость движения рабочей машины возрастает до величины, заданной оператором с помощью органов управления 13.
В результате этого обеспечивается автоматическое регулирования тягового усилия и скорости движения рабочей машины при полном использовании мощности ДВС 1.
Для реализации поворота машины тяговые мехатронные модули 10, 11 (их контроллеры 22, 23) после получения информации о величине радиуса поворота с шины CAN устанавливают различные угловые скорости вращения роторов электромоторов 3, 4, обеспечивая поворот рабочей машины.
Одновременно контроллеры 21, 22, 23 генераторного 9 и тяговых 10, 11 мехатронных модулей обмениваются данными о текущих величинах их мощностей по шине CAN и далее управляют силовыми преобразователями 18, 19, 20 из условия приведения в соответствие выходной мощности генераторного мехатронного модуля 9 и суммарной мощности, потребляемой тяговыми мехатронными модулями 11, 12, а также из условия поддержания предварительно установленного распределения тягового усилия между колесами передней и задней оси, либо из условия предотвращения паразитной циркуляции мощности, обусловленной различием длины пути каждого колеса или гусеницы при повороте рабочей машины.
Если при текущем значении тягового усилия рабочей машины и заданной оператором скорости ее движения мощность ДВС 1 оказывается избыточной, то контроллер 17 ДВС осуществляет снижение этой мощности, регулируя подачу топлива.
При этом с помощью датчиков 15 контролируются режимы и параметры МТУ. Их текущее состояние отображается на панели оператора 14.
При работе МТУ необходимо обеспечить устойчивость работы ДВС на внешней скоростной характеристике.
Необходимо, чтобы его максимальный крутящий момент Мкmax на заданную величину превышал момент на режиме номинальной мощности Μкн. Изменение крутящего момента Мк на внешней характеристике характеризуется номинальным коэффициентом запаса крутящего момента

В предложенной МТУ применен двигатель постоянной мощности (ДПМ), имеющий высокое значение µн, например, 40%. Такое значение может быть получено, в частности, путем регулирования наддува в сочетании с коррекцией подачи топлива с помощью контроллера 17 ДВС. Соответственно, мощность ДВС Ne при его работе на его внешней характеристике сохраняется постоянной в диапазоне скоростей вращения его коленчатого вала от ωmin до ωmax(от 0,6 ωmax до ωmax).
Если тяговое усилие машины стабильно (стационарный режим работы МТУ), то контроллер 17 ДВС устанавливает его угловую скорость в середине рабочей зоны, например, ωo≈0,8 ωmax. В этом случае ДВС сохраняет свою мощность как при снижении скорости вращения от ωo до ωmin=0,6 ωmax, так и при повышении скорости вращения от ωo до ωmax.
Сохранение мощности ДВС Ne при изменении скорости его вращения ωд открывает возможность использования инерционных масс вращающихся частей ДВС, генератора или гидронасоса для увеличения тяговой мощности рабочей машины, для сглаживания колебаний нагрузки на ДВС, а также для рекуперации кинетической энергии рабочей машины при ее торможении путем передачи этой энергии на вращающиеся части (детали) ДВС, генератора (гидронасоса) и, при необходимости, на маховик, прикрепленный к этим частям.
Вращающиеся части ДВС 1 и генератора 2 или гидронасоса обладают запасом кинетической энергии

где I - приведенный момент инерции этих частей относительно оси вращения, ω - угловая скорость их вращения.
В случае возрастания тягового усилия рабочей машины F во время работы МТУ в переходных и динамических режимах угловая скорость ДВС ωд снижается до величины ωo>ωд>ωmin. Это снижение сопровождается передачей кинетической энергии Кз вращающихся частей частей ДВС 1 и генератора 2 (либо гидронасоса) на этот генератор (гидромотор)

Соответственно, генератор или гидромотор преобразует в электрическую или гидравлическую энергию одновременно как механическую энергию ДВС, так и кинетическую энергию вращающихся частей ДВС и генератора или гидронасоса. При этом преобразуемая мощность превышает мощность ДВС Ne, что обеспечивает повышение тяговой мощности МТУ и машины в целом.
Если ДВС работает на скорости ωo и происходит снижение тягового усилия F рабочей машины в динамических режимах работы МТУ, то угловая скорость ДВС ωд повышается до величины ωmax>ωд>ωo.
Это повышение сопровождается передачей избыточной энергии от ДВС на вращающиеся части ДВС 1 и генератора 2 или гидронасоса, что приводит к увеличению их кинетической энергии

При торможении рабочей машины электромоторы 3, 4 (гидромоторы) переходят в режим генераторов (насосов), а генератор 2 (гидронасос) в режим электромотора (гидромотора). Благодаря этому кинетическая энергия замедляющейся рабочей машины (энергии торможения машины) и избыточная энергия ДВС передается на вращающиеся части ДВС 1 и генератора 3 (гидронасоса), выполняющие роль гироскопического (маховичного) накопителя энергии.
Для повышения эффективности такого накопителя энергии в МТУ может дополнительно устанавливаться повышающий редуктор (мультипликатор) 24 и/или к этим вращающимся частям может быть прикреплен дополнительный маховик. Этот маховик, с целью снижение диапазона изменения угловой скорости ДВС, может быть выполнен с переменным моментом инерции.
В случае интенсивного торможения машины частота вращения ДВС может превысить ωmax. Для предотвращения такой возможности необходимо поглощение избыточной энергии торможения. С этой целью в МТУ может быть установлен вспомогательный электрический, электромеханический или гидравлический накопитель энергии 25 и/или тормозной резистор 26.
Если машина должна работать с максимальной тяговой мощностью, то контроллер 17 обеспечивает работу ДВС 1 на его внешней характеристике в диапазоне скоростей вращения от ωmin до ωmax. Контроллер трансмиссии 16 при этом обеспечивает нужное передаточное отношение трансмиссии, а контроллер 21 генератора (гидронасоса) - поддержание номинального значения напряжения или тока в силовых шинах 12 (давления или расхода жидкости в гидравлических магистралях).
При малых величинах тягового усилия F рабочей машины мощность ДВС 1 оказывается избыточной. В этих случаях контроллер 17 обеспечивает режим работы ДПМ с меньшей мощностью и с более высоким значением коэффициентом запаса крутящего момента µ. Описанные процессы передачи энергии и обмена этой энергией при этом не изменяются.
Таким образом, в предложенной МТУ реализован гироскопический (маховичный) накопитель энергии с использованием существующих деталей, узлов и агрегатов МТУ без применения дополнительного накопителя энергии, что обеспечивает эффективное сглаживание динамических нагрузок на ДВС при одновременном улучшении массо-габаритных характеристик и расширении сферы применения МТУ.
Для специалистов в данной области техники понятно, что кроме описанной самоходной рабочей машины возможны также иные варианты ее реализации на основе признаков, изложенных в формуле изобретения.
(56) 1. RU 19233 U1, Н02М 11/00, 13.12.2000.
2. RU 2179119 C1, B60L 11/08, А01В 67/00, В60К 17/12, 10.02.2002.
3. RU 92844 U1, B62D 25/16, 10.04.2010.
4. RU 125662 U1, F16H 39/00, 10.03.2013.
5. RU 2394701 С2, B60L 11/12, В60К 6/00, 20.07.2010.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕМЛЕРОЙНО-ТРАНСПОРТНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2537434C1 |
| ГУСЕНИЧНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ИЛИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2545145C1 |
| ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ И ГИДРАВЛИЧЕСКИМ ПРИВОДОМ РАБОЧЕГО ОРГАНА (ВАРИАНТЫ) | 2019 |
|
RU2721633C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2014 |
|
RU2550408C1 |
| САМОХОДНАЯ РАБОЧАЯ МАШИНА С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2540679C1 |
| ПРОМЫШЛЕННЫЙ ТРАКТОРНЫЙ АГРЕГАТ С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2014 |
|
RU2550867C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР С ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2547154C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ С ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ | 2018 |
|
RU2688563C1 |
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ ПРИВОДА | 2019 |
|
RU2715820C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТРАНСМИССИЯ САМОХОДНОЙ МАШИНЫ | 2015 |
|
RU2605957C1 |
Изобретение относится к самоходным рабочим машинам, в частности. Моторно-транс-миссионная установка (МТУ) содержит ДВС, один генератор или гидронасос, соединенный с ДВС, один электромотор или гидромотор привода хода и бортовые редукторы, связанные с ведущими колесами или гусеницами машины. С помощью одного или нескольких генераторов или гидронасосов осуществляется преобразования кинетической энергии одной вращающейся части ДВС, генератора или гидронасоса в электрическую или гидравлическую энергию. ДВС имеет номинальный коэффициент запаса крутящего момента не менее 25% и/или к одной вращающейся части ДВС, генератора или гидронасоса, прикреплен маховик, момент инерции которого возрастает с увеличением скорости его вращения. В частных вариантах реализации изобретения генератор, гидронасос или группа этих генераторов или гидронасосов соединяются с ДВС через повышающий редуктор и/или упругую муфту, генератор размещен в герметичной вакуумной камере и соединен с ДВС через повышающий редуктор и магнитную муфту, в состав МТУ включены контроллеры, реализующие различные алгоритмы управления МТУ. Изобретение обеспечивает улучшение массогабаритных характеристик МТУ и возможность ее применения на машинах с гидростатическими и электромеханическими силовыми передачами. 24 з.п. ф-лы, 1 ил.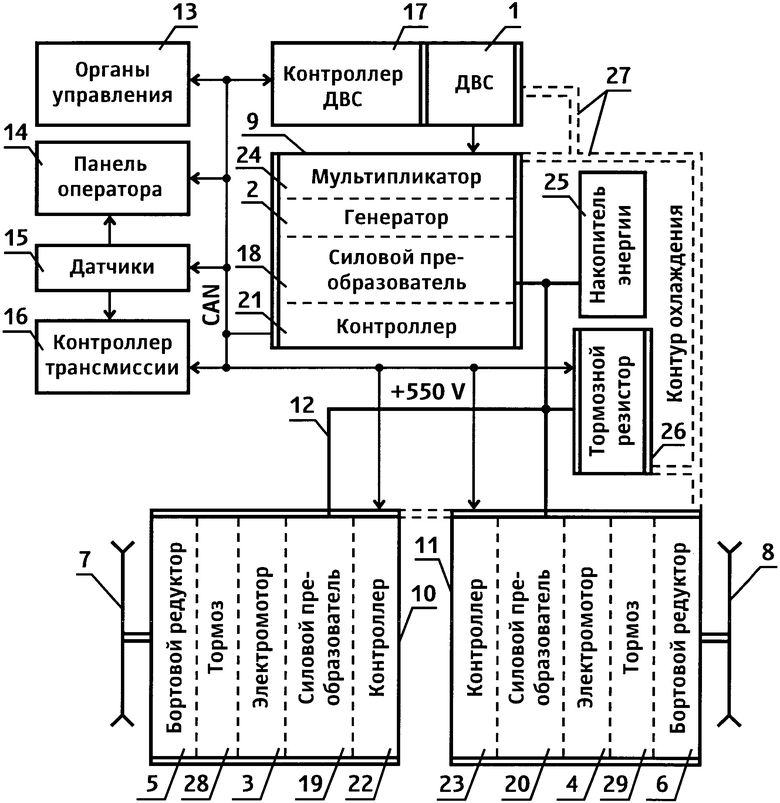
1. Моторно-трансмиссионная установка (МТУ) рабочей машины, содержащая двигатель внутреннего сгорания (ДВС), по меньшей мере один генератор или гидронасос, функционально соединенный с ДВС и выполненный/выполненные с возможностью преобразования по меньшей мере части механической энергии ДВС в электрическую или гидравлическую энергию, бортовые редукторы, связанные с ведущими колесами или гусеницами рабочей машины, по меньшей мере один электромотор или гидромотор привода хода рабочей машины, приспособленный для преобразования электрической или гидравлической энергии в механическую энергию, причем бортовые редукторы непосредственно или по меньшей мере через одно передаточное устройство связаны по меньшей мере с одним электромотором или гидромотором привода хода рабочей машины, отличающаяся тем, что по меньшей мере один генератор или гидронасос выполнен с возможностью преобразования по меньшей мере части кинетической энергии по меньшей мере одной вращающейся части ДВС, или генератора, или гидронасоса, в электрическую или гидравлическую энергию, а ДВС имеет номинальный коэффициент запаса крутящего момента не менее 25% или по меньшей мере к одной вращающейся части ДВС, или генератора, и/или гидронасоса, прикреплен маховик, выполненный таким образом, что момент инерции этого маховика возрастает с увеличением скорости его вращения.
2. МТУ по п. 1, отличающаяся тем, что генератор, или гидронасос, или несколько генераторов, или несколько гидронасосов, механически соединенный/соединенные с ДВС, имеет/имеют мощность или суммарную мощность, обеспечивающую возможность преобразования в электрическую или гидравлическую энергию механической энергии ДВС и кинетической энергии по меньшей мере одной вращающейся части ДВС и/или по меньшей мере одного генератора или гидронасоса.
2. МТУ по п. 1, отличающаяся тем, что по меньшей мере один генератор или гидронасос функционально соединен с ДВС через повышающий редуктор и/или упругую муфту.
3. МТУ по п. 1, отличающаяся тем, что она дополнительно содержит контроллер, который приспособлен для управления ДВС и/или по меньшей мере одним генератором или гидронасосом из условия достижения предварительно установленной или максимальной выходной мощности по меньшей мере одного генератора или гидронасоса и/или для обеспечения заданной величины его выходного напряжения или тока, либо расхода или давления рабочей жидкости.
4. МТУ по п. 1, отличающаяся тем, что по меньшей мере один генератор размещен в герметичной вакуумной камере и функционально соединен с ДВС через повышающий редуктор, и/или магнитную муфту, и/или управляемую электромагнитную муфту.
5. МТУ по п. 4, отличающаяся тем, что она дополнительно содержит контроллер, который приспособлен для управления ДВС и/или электромагнитной муфтой из условия достижения предварительно установленной или максимальной выходной мощности по меньшей мере одного генератора и/или обеспечения заданной величины его выходного напряжения или тока.
6. МТУ по п. 1, отличающаяся тем, что по меньшей мере один генератор или гидронасос выполнен с повышенным моментом инерции по меньшей мере одной его вращающейся части или к этой вращающейся части прикреплен маховик.
7. МТУ по п. 1, отличающаяся тем, что по меньшей мере один генератор имеет ротор, расположенный снаружи статора и соединенный с ДВС через повышающий редуктор и/или муфту.
8. МТУ по п. 1, отличающаяся тем, что по меньшей мере один генератор или гидронасос, а также по меньшей мере один электромотор или гидромотор привода хода рабочей машины, выполнены обратимыми с возможностью преобразования кинетической энергии рабочей машины в электрическую или гидравлическую энергию и ее последующего преобразования в кинетическую энергию по меньшей мере одной вращающейся части ДВС, и/или генератора, и/или гидронасоса.
9. МТУ по п. 1, отличающаяся тем, что генератор, или гидронасос, или несколько генераторов, или несколько гидронасосов, выполнен/выполнены с возможностью преобразования механической энергии ДВС в электрическую или гидравлическую энергию, а также с возможностью передачи этой энергии по меньшей мере на один электромотор или гидромотор привода рабочего оборудования и/или вала отбора мощности рабочей машины.
10. МТУ по п. 1, отличающаяся тем, что она имеет дополнительный генератор или дополнительный гидронасос, выполненный с возможностью преобразования части механической энергии ДВС в электрическую или гидравлическую энергию, а также с возможностью передачи этой энергии по меньшей мере на один электромотор или или гидромотор привода рабочего оборудования и/или вала отбора мощности рабочей машины.
11. МТУ по п. 1, отличающаяся тем, что по меньшей мере один генератор или электромотор выполнен в виде синхронной электрической машины с постоянными магнитами, или вентильно-индукторной электрической машины, или асинхронной электрической машины.
12. МТУ по п. 1, отличающаяся тем, что она оснащена электрическим соединителем, подключенным к генератору, который приспособлен для питания внешних потребителей рабочей машины.
13. МТУ по п. 1, отличающаяся тем, что она дополнительно оснащена электрическим модулем, выполненным с возможностью его подключения по электрическому кабелю к внешней трехфазной электрической сети с напряжением 220/380 В переменного тока, а также с возможностью преобразования и передачи электрической энергии этой внешней сети по меньшей мере на один электромотор из условия использования энергии внешней электрической сети при работе машины.
14. МТУ по п. 1, отличающаяся тем, что генератор выполнен с возможность работы в режиме электромотора и приспособлен для запуска соединенного с ним ДВС от внешней электрической сети, подключаемой с использованием электрического кабеля, или по меньшей мере от одного электромотора привода хода рабочей машины, и/или рабочего оборудования, и/или вала отбора мощности рабочей машины, выполненного с возможностью работы в режиме генератора.
15. МТУ по п. 1, отличающаяся тем, что гидронасос выполнен с возможность работы в режиме гидромотора и приспособлен для запуска соединенного с ним ДВС по меньшей мере от одного гидромотора привода хода рабочей машины, и/или рабочего оборудования, и/или вала отбора мощности рабочей машины, выполненного с возможностью работы в режиме гидронасоса, или от внешней насосной станции.
16. МТУ по п. 15, отличающаяся тем, что бортовые редукторы выполнены обратимыми с возможностью приведения во вращение по меньшей мере одного электромотора или гидромотора привода хода при буксировке рабочей машины или при ее движении под уклон.
17. МТУ по п. 1, отличающаяся тем, что по меньшей мере один электромотор или гидромотор или соединенный с ним бортовой редуктор оснащен нормально замкнутым стояночным тормозом, выполненным с возможностью предотвращения движения рабочей машины под уклон и приспособленным для создания тормозного момента в случае поступления на этот тормоз внешнего сигнала управления и/или в случае снижения электрического напряжения на электромоторе или давления на гидромоторе до предварительно установленной величины.
18. МТУ по п. 1, отличающаяся тем, что по меньшей мере один генератор или электромотор выполнен с жидкостным охлаждением.
19. МТУ по п. 18, отличающаяся тем, что ДВС и по меньшей мере один генератор или электромотор имеют общую систему жидкостного охлаждения.
20. МТУ по п. 1, отличающаяся тем, что она содержит по меньшей мере один аппарат управления движением рабочей машины и контроллер, соединенные между собой, причем контроллер приспособлен для управления ДВС, и/или по меньшей мере одним генератором, и/или гидронасосом, и/или электромотором или гидромотором привода хода рабочей машины, таким образом, чтобы скорость движения рабочей машины поддерживалась в соответствии с величиной скорости, заданной аппаратом управления, если мощности ДВС достаточно для поддержания этой скорости при текущем значении тяговой нагрузки рабочей машины, либо из условия достижения максимальной тяговой мощности рабочей машины, если при текущей величине ее нагрузки мощности ДВС недостаточно для поддержания заданной аппаратом управления скорости движения рабочей машины.
21. МТУ по п. 1, отличающаяся тем, что она оснащена электрическим, или электромеханическим, или гидравлическим накопителем энергии, соединенным по меньшей мере с одним генератором, или гидронасосом, или электромотором, или гидромотором привода хода рабочей машины.
22. МТУ по п. 1, отличающаяся тем, что передаточное устройство выполнено в виде дифференциального устройства, которое функционально соединено с электромотором или гидромотором привода хода и бортовыми редукторами и выполнено с возможностью перераспределения крутящего момента, передаваемого на каждый бортовой редуктор.
23. МТУ по п. 22, отличающаяся тем, что оснащена дополнительным электромотором или гидромотором, приспособленным для управления указанным перераспределением крутящего момента в зависимости от сигнала управления поворотом рабочей машины.
24. МТУ по п. 1, отличающаяся тем, что передаточное устройство содержит главную передачу, выходы которой соединены с бортовыми редукторами с использованием бортовых фрикционов.
25. МТУ по п. 1, отличающаяся тем, что она содержит один генератор или два гидравлических насоса, а также два электромотора или гидромотора, каждый из которых функционально соединен с соответствующим бортовым редуктором.
| ЭЛЕКТРИЧЕСКАЯ СИЛОВАЯ ПЕРЕДАЧА ДЛЯ РАБОЧЕЙ МАШИНЫ | 2006 |
|
RU2394701C2 |
| Приспособление для игры на баяне с ножными педалями | 1949 |
|
SU88756A1 |
| JP 2001012404 A, 16.01.2001 | |||
| DE 3338548 A1 02.05.1985 | |||

