Изобретение относится к машиностроению и может быть использовано в любой отрасли промышленности при механизации сборки резьбовых соединений.
Известен инерционный гайковерт (А.с. №891418, МКИ3 В25В 21/00, 1981 г.), который содержит корпус, размещенный в нем двигатель, импульсатор, механизм свободного хода с динамической опорой, второй механизм свободного хода, шпиндель и патрон для удержания резьбовой детали.
Недостатками устройства являются низкая производительность процесса завинчивания резьбовой детали, низкая точность осевых сил затяжки, сложность конструкции, обусловленная наличием динамической опоры.
Наиболее близким, по технической сущности к предлагаемому решению является инерционный гайковерт (А.с. №818850, МКИ3 В25В 21/00, 1981 г.), который содержит корпус с рукояткой, силовой привод, на выходном валу которого установлена шестерня, муфту, внутренняя обойма которой закреплена на корпусе, шпиндель с закрепленным на нем рабочим инструментом, планетарный редуктор с неуравновешенными сателлитами, установленными на водиле и взаимодействующими с шестерней, при этом водило жестко связано со шпинделем и внутренней обоймой муфты.
Недостатками данного гайковерта являются низкая производительность сборки из-за длительного процесса завинчивания резьбовых деталей, т.к. процесс завинчивания осуществляется импульсно, и низкая точность моментов (осевых сил) затяжки, вызванная нестабильностью крутящего момента на оси двигателя, и нестабильностью моментов сопротивления в резьбовых соединениях, погрешность от которых достигает 30% номинального значения осевых сил затяжки.
Задачей, решаемой изобретением, является устранение указанных недостатков.
Это достигается тем, что инерционный гайковерт, содержащий силовой привод, размещенный в корпусе, на выходном валу которого установлена шестерня, муфту, планетарный редуктор с неуравновешенными сателлитами, установленными на его водиле, и шпиндель с закрепленным на нем рабочим инструментом, имеет зубчатые передачи, колесо одной из которых кинематически связано с шестерней, установленной на выходном валу силового привода, а шестерня - с сателлитами планетарного редуктора, механизм прерывистого движения, связанный с одной стороны с водилом планетарного редуктора, а с другой стороны - через две другие зубчатые передачи со шпинделем, систему контроля затяжки по углу поворота резьбовой детали и модуляционный диск. Модуляционный диск установлен на выходном валу механизма прерывистого движения и контактирует с системой контроля затяжки по углу поворота резьбовой детали. Муфта установлена на выходном валу силового привода после шестерни с возможностью контакта с системой контроля затяжки, а на ее выходном валу установлены колесо второй и шестерня третьей зубчатых передач.
Введение в кинематическую схему гайковерта трех зубчатых передач, колесо одной из которых кинематически связано с шестерней, установленной на выходном валу силового привода, а шестерня - с сателлитами планетарного редуктора, и механизма прерывистого движения, связанного с одной стороны с водилом планетарного редуктора, а с другой стороны - через две другие зубчатые передачи со шпинделем, позволяет сформировать две ветви вращения: тихоходную и быстроходную. Т.о. процесс завинчивания производится не импульсно, как в прототипе, а непрерывно за счет осуществления процесса завинчивания и предварительной затяжки резьбового соединения по быстроходной ветви вращения и исключения остановки процесса завинчивания в случае возникновения больших моментов сопротивления в резьбе благодаря передаче вращения от силового привода к шпинделю по тихоходной ветви вращения. При этом скорость вращения шпинделя гайковерта при передаче вращения по быстроходной ветви вращения составляет порядка 60-80 об/мин, что выше в 2-2,5 раза по сравнению со скоростью завинчивания прототипа, что повышает производительность сборки гайковерта по сравнению с прототипом.
Повышение точности моментов (осевых сил) затяжки обеспечивается за счет введения в конструкцию гайковерта системы контроля затяжки по углу поворота резьбовой детали и модуляционного диска, штыри которого при передаче вращения по тихоходной ветви замыкают контакты системы контроля, а счетчик импульсов системы регистрирует импульсы, при этом процесс затяжки продолжается до тех пор, пока не зарегистрируется требуемое число импульсов, соответствующее требуемому углу затяжки резьбового соединения, и за счет исключения погрешности осевых сил затяжки от нестабильности сопротивления вращению в самом резьбовом соединении, которое может составлять до 20% от номинального значения, что, в целом, повышает точность осевых сил затяжки устройства в 3-3,5 раза по сравнению с прототипом.
На фиг.1 представлена кинематическая схема инерционного гайковерта.
На фиг.2 - схема возникновения импульсов моментов центробежных сил инерции от неуравновешенных масс сателлитов.
Инерционный одношпиндельный гайковерт состоит из корпуса с рукояткой, в котором расположен двигатель 1, на выходном валу которого установлены шестерня 2 и муфта предельного момента 3. Шестерня 2 с одной стороны через зубчатое колесо 4 связана с планетарным редуктором 5, сателлиты 6 которого выполнены неуравновешенными и установлены на водиле 7, на выходном валу которого закреплен механизм прерывистого движения 8 храпового типа, связанный со шпинделем 9 с рабочим инструментом 10 через шестерню зубчатой передачи 11 и колесо зубчатой передачи 12. С другой стороны шестерня 2 связана со шпинделем 9 через муфту предельного момента 3, на выходном валу которой установлены колесо зубчатой передачи 11 и шестерня зубчатой передачи 12. На выходном валу механизма прерывистого движения 8 установлен модуляционный диск 13 с расположенными по его окружности токопроводящими штырями. Для контроля угла поворота резьбовой детали в процессе затяжки служит электрическая система 14, состоящая из контактов, проводников, реле Р, счетчика импульсов СИ и контактирующая со штырями модуляционного диска 13 и муфтой предельного момента 3.
Гайковерт работает следующим образом.
Оператор подводит рабочий инструмент 10 гайковерта к резьбовой детали, которым захватывает ее за головку болта (гайку) и запускает двигатель 1. Одновременно замыкается контакт электрической системы контроля 14 угла затяжки резьбового соединения. Начинается процесс завинчивания резьбового соединения. Вращение от выходного вала двигателя 1 передается по двум кинематическим цепям - быстроходной, но маломоментной и тихоходной, но высокомоментной. По быстроходной - вращение передается от шестерни 2 через муфту предельного момента 3, зубчатую передачу 12, шпиндель 9 с рабочим инструментом 10 к резьбовой детали. Происходит процесс завинчивания и предварительной затяжки резьбового соединения.
В это же время вращение передается по тихоходной кинематической цепи от шестерни 2 к колесу 4 первой зубчатой передачи на сателлиты 6 с неуравновешенными грузиками планетарного редуктора 5. При вращении сателлитов 6 с неуравновешенными грузиками возникают центробежные силы инерции (фиг.2), которые направлены в противоположную сторону нормальных ускорений, т.е. от центра вращения, которые равны:
где m - масса грузика; Wn - нормальное ускорение; σ - вес грузика; g - ускорение свободного падения; ω1 - угловая скорость вращения сателлитов 6; r1 - радиус сателлитов 6.
Совокупность двух сил инерции, которые по мере поворота сателлитов 6 из положения (α) в (б) обеспечивают увеличение момента сил инерции относительно оси вала водила 7 планетарного редуктора 5, а при повороте грузика из положения (б) в (г) момент сил инерции уменьшается до нуля. При повороте из положения (г) в (б) момент сил инерции вновь возрастает, а при повороте из положения (в) в (а) уменьшается, но он направлен в противоположную сторону затяжки.
При повороте сателлитов 6 из положения (α) к (г) возникает момент сил инерции, который поворачивает вал водила 7 планетарного редуктора 5 и жестко связанную с ним обойму с собачками механизма прерывистого движения 8. При вращении выходного вала муфты предельного момента 3 зубчатая передача 11 передает вращение храповому колесу механизма прерывистого движения 8 с угловой скоростью большей, чем угловая скорость поворота обоймы. Собачки не входят в зацепление с зубьями храпового колеса, а проскальзывают по ним.
При повороте сателлитов 6 из положения (г) в (α) вал водила 7 планетарного редуктора 5 поворачивается в противоположную сторону затяжки. Подпружиненные собачки утопают, проскальзывая по зубьям храпового колеса, не передавая вращения.
При достижении требуемой величины момента предварительной затяжки резьбового соединения срабатывает муфта предельного момента 3, т.е. начинают проскальзывать ее полумуфты. Подвижная полумуфта, перемещаясь вдоль оси вала муфты предельного момента 3, замыкает контакты электрической системы контроля 14 угла поворота шпинделя 9. Передача вращения по быстроходной кинематической цепи прекращается. Останавливается выходной вал муфты предельного момента 3, а следовательно, зубчатая передача 11 и храповое колесо механизма прерывистого движения 8. При появлении на входном валу механизма прерывистого движения 8 момента сил инерции, направленного по направлению поворота резьбовой детали при затяжке, собачки обоймы механизма прерывистого движения 8 войдут в зацепление с зубьями храпового колеса и повернут его. Этот поворот через зубчатые передачи 11 и 12 передастся на шпиндель 9 с рабочим инструментом 10 к резьбовой детали. Одновременно с поворотом храпового колеса повернется модуляционный диск 13 и один из его штырей замкнет контакты системы контроля 14, а счетчик импульсов СИ зарегистрирует первые импульсы. Процесс затяжки продолжается до тех пор, пока счетчик импульсов СИ не зарегистрирует требуемое число импульсов, соответствующее требуемому углу затяжки резьбового соединения, и сработает реле Р.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2005 |
|
RU2288834C1 |
| ГАЙКОВЕРТ | 2011 |
|
RU2473417C1 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2012 |
|
RU2508978C2 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2007 |
|
RU2345880C1 |
| УДАРНЫЙ ГАЙКОВЕРТ | 2011 |
|
RU2480323C2 |
| МНОГОШПИНДЕЛЬНЫЙ ГАЙКОВЕРТ | 2007 |
|
RU2360784C2 |
| ВИБРАЦИОННЫЙ ГАЙКОВЕРТ | 1998 |
|
RU2182533C2 |
| Гайковерт инерционный | 1978 |
|
SU818850A1 |
| ВИБРАЦИОННЫЙ ГАЙКОВЕРТ | 1994 |
|
RU2081741C1 |
| Гайковерт | 1978 |
|
SU753628A1 |

Изобретение относится к машиностроению и может быть использовано в любой отрасли промышленности при механизации сборки резьбовых соединений. Инерционный гайковерт содержит силовой привод 1, размещенный в корпусе, на выходном валу которого установлена шестерня 2, муфту 3, планетарный редуктор 5 с неуравновешенными сателлитами 6, установленными на его водиле 7, и шпиндель 9 с закрепленным на нем рабочим инструментом 10, имеет зубчатые передачи, колесо 4 одной из которых кинематически связано с шестерней 2, установленной на выходном валу силового привода 1, а шестерня - с сателлитами 6 планетарного редуктора 5, механизм прерывистого движения 8, связанный с одной стороны с водилом 7 планетарного редуктора 5, а с другой стороны - через две другие зубчатые передачи со шпинделем 9, систему контроля затяжки по углу поворота резьбовой детали 14 и модуляционный диск 13. Модуляционный диск 13 установлен на выходном валу механизма прерывистого движения 8 и контактирует с системой контроля затяжки по углу поворота резьбовой детали 14. Муфта 3 установлена на выходном валу силового привода 1 после шестерни 2 с возможностью контакта с системой контроля затяжки 14, а на ее выходном валу установлены колесо второй и шестерня третьей зубчатых передач. Технический результат заключается в повышении точности и производительности сборки резьбовых соединений. 2 ил.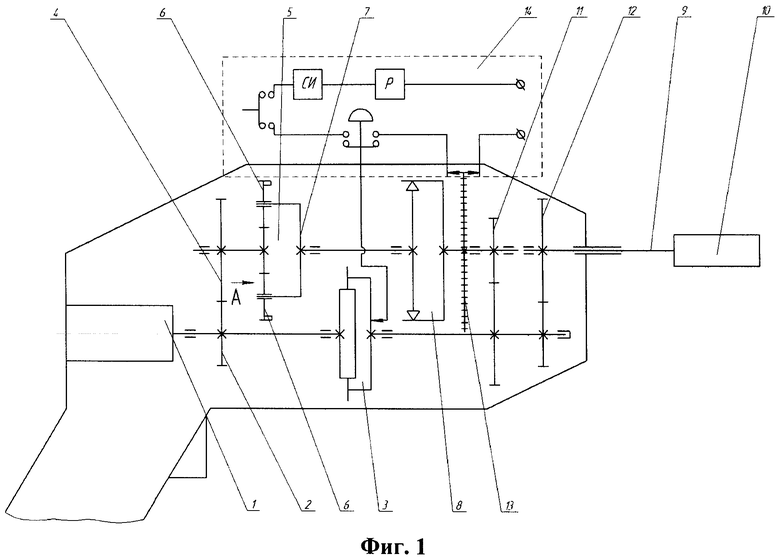
Инерционный гайковерт, содержащий силовой привод, размещенный в корпусе, на выходном валу которого установлена шестерня, муфту, планетарный редуктор с неуравновешенными сателлитами, установленными на его водиле, и шпиндель с закрепленным на нем рабочим инструментом, отличающийся тем, что он имеет зубчатые передачи, колесо одной из которых кинематически связано с шестерней, установленной на выходном валу силового привода, а шестерня - с сателлитами планетарного редуктора, механизм прерывистого движения, связанный с одной стороны с водилом планетарного редуктора, а с другой стороны - через две другие зубчатые передачи со шпинделем, систему контроля затяжки по углу поворота резьбовой детали и модуляционный диск, установленный на выходном валу механизма прерывистого движения и контактирующий с системой контроля затяжки, при этом муфта установлена на выходном валу силового привода после шестерни с возможностью контакта с системой контроля затяжки, а на ее выходном валу установлены колесо второй и шестерня третьей зубчатых передач.
| Гайковерт инерционный | 1978 |
|
SU818850A1 |
| Гайковерт инерционный | 1980 |
|
SU891418A1 |
| Автоматический планетарный вариатор | 1986 |
|
SU1414977A1 |
| РУЧНАЯ МАШИНА ВРАЩАТЕЛЬНОГО ДЕЙСТВИЯ С РЕЖИМАМИ РАБОТЫ НА ПЕРВОЙ И ВТОРОЙ ПЕРЕДАЧАХ | 2008 |
|
RU2468909C2 |
| US 2011147029 A1, 23.06.2011 | |||

