Изобретение относится к ручным переносным Инструментам с силовым приводом, предназначенным для соединения, разъединения резьбовых соединений, и может быть использовано для механизации монтажных и механосборочгных работ в различных отраслях промышленности.
Известен ударно-импульсный гайковерт, содержащий корпус с рукояткой, силовой привод с выходным валом, планетарный редуктор, ударно-импульсный механизм и шпиндель 1.
Иедостаток указанного гайковерта заключается в том, что он не обеспечивает высокой точности максимального момента затяжки, а также автоматического регулирования скорости затяжки в зависимости от момента сопротивления резьбового соединения.
Наиболее близким по техническому решению к изобретению является гайковерт инерционный, содержащий корпус с рукояткой, силовой привод с выходным валом, муфту, шпиндель с закрепленным на нем рабочим инструментом и планетарный редуктор 2.
Недостаток указанного гайковерта заключается в том, что он не обеспечивает высокой точности максимального момента затяжК|И, а автоматическое регулирование
скорости затяжки в зависимости от момента сопротивления резьбового соединения осуществляется на ограниченном участке передаточ1ных чисел.
Целью изобретения является повышение точности максимального момента затяжки и автоматического регулирования скорости затяжки.
Указанная цель достигается тем, чтосателлиты планетарного редуктора выполнены неуравновешенными « установлены на его водиле, жестко связанном со шпинделем и внутренней обоймой обгонной муфты, закрепленной на корпусе, а гайковерт снабжен размещенной на выходном валу привода шестерней, взаимодействующей с неуравновешенными сателлитами.
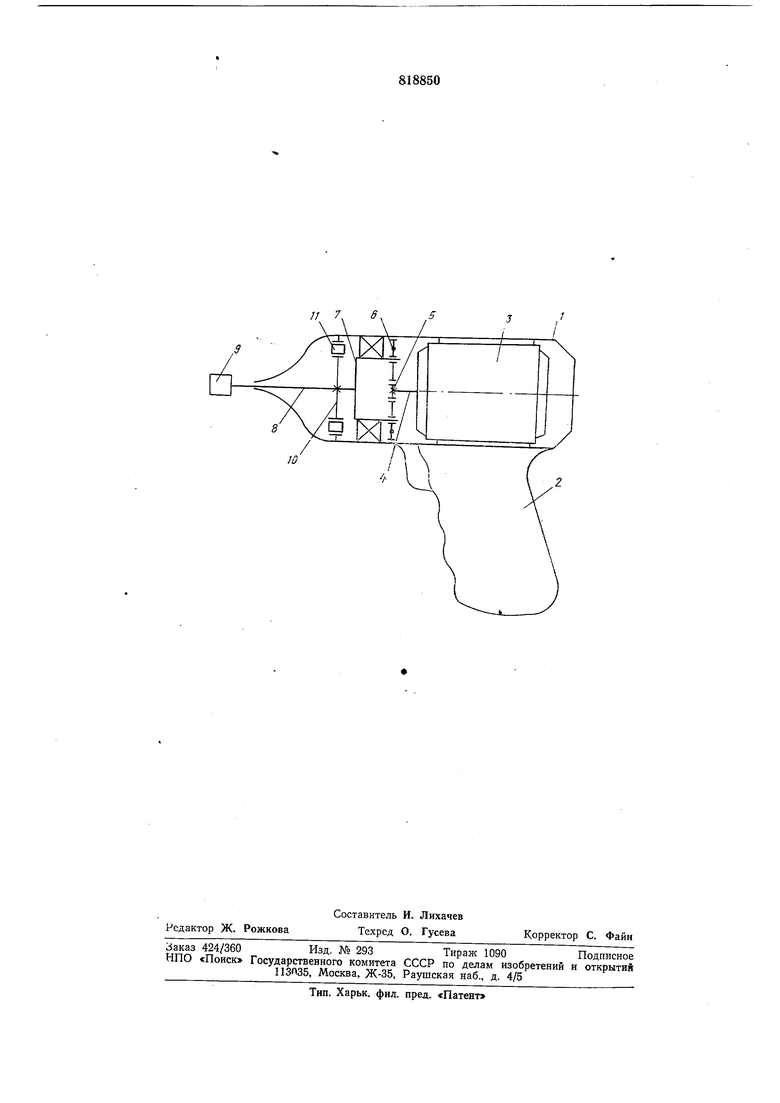
На чертеже представлена кинематичеекая схема гайковерта инерционного.
Гайковерт состоит из корпуса / с рукояткой 2, силового привода .3 с выходным валом 4, шестерни 5, неуравновешенных сателлитов 6, размещенных на водиле 7, жестко связанном со шпинделем 8 с закрепленным на нем рабочим инструментом 9 и внутренней обоймой 10 обгонной муфты /7.
Гайковерт работает следующим образом.
Шестерня 5, размещенная на выходном валу 4 и приводимая -во вращение приводом 3, вращает неуравновешенные сателлиты 6.
Центробежные силы сателлитов 6 пово.рачивают водило 7 то в одну, то в другую сторону, лрячем чем меньше сопротивле«ие на рабочем инструменте, тем с большей амплитудой оно будет колебаться, тем меньший крутящИй момент передается на рабочий инструмент. Если сопротивление достаточно мало, то ценхробежные силы будут удерживать «еуравновешенные сателлиты в крайнем положения, и шестерня S, сателлиты € и водило 7 будут вращаться |Как единое целое. Когда водило 7 заторможено, сателлиты 6 вращаются с максимальной скоростью, максимальные центробежные силы Стремятся повернуть водило 7, максимальный крутящий момент передается на рабочий инструмент, чтобы заставить его вращаться в одном направлении. Имцульсы в протевололож1ном лаправленил не должны восприниматься. Это осуществляется с помощью обгонной муфты ,//. Прямой импульс замыкается на рабочем инструменте, а обратный через обгонную муфту Ц - на корпусе /. Описанный гайковерт имеет бесступенчатую передачу.
В настоящее время в массовом машиностроительном производстве задача высокопроизводительной сборки болтовых соединений в сочетании со строго нормируемым моментом затяжки является практически нерешенной для многих случаев в силу нестабильной характеристики существующих гайковертов ударво-импульсного действия, момент затяжки которых определяется количеством ударных импульсов. В связи с ЭТ1ИМ в автомобильной и других отраслях промышленности на ответственных болтовых соединениях применяется ручное (следовательно, малопроизБОДительное) затягивание.
Бесступенчатое регулирование скорости затяжки резьбовых соединений в зависимости от момента соцротивления цозволяет полностью использовать мощность приводного двигателя.
Гайковерт инерционный создает вибрационный характер затяжки, который позволяет в значительной мере усреднить ошибки нарезки резьбы, различные коэффициенты трения и имеет на стоп-режиме стабильные характеристики, i
Снижение вибрации и шума при работе ic гайковертом улучшает условия труда.
Изобретение позволяет получить точный заданный момент затяжки, так как он зависит от точности изготовления гайковерта (отклонение величины момента от заданного не превышает 2%), автоматически регулировать скорость завинчивания гаек в зависимости от момента сопротивления, поГ.ышая производительность труда, легко перенастраивать гайковерт на различные максимальные моменты затяжки путем установки сателлитов с различными неуравновешенными грузами, снизить вибрацию и шум, так как отсутствует ударно-импульсный механизм с бойком и ударником.
Формула изобретения
Гайковерт инерционный, содержащий корпус с рукояткой, силовой привод с выходным валом, муфту, шпиндель с закрепленным на нем рабочим инструментом и планетарный редуктор, отличающийся тем, что, с целью повышения точности и автом атического регулирования скорости , сателлиты планетарного редуктора выполнены неуравновешенными и установлены на его водиле, жестко связанном со шпинделем и внутренней обоймой муфты, закрепленной на корпусе, а гайковерт снабжен размещенной на выходном валу .привода шестерней, взаимодействующей с неуравновешенными сателлитами.
Источники информации, принятые во внимание при экспертизе:
1.Патент США №2756853, кл. 123-42.67, 1956.
2.Авторское свидетельство СССР № 497125, кл. В 25 В 21/02, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ГАЙКОВЕРТ | 2013 |
|
RU2535835C2 |
| Гайковерт инерционный | 1978 |
|
SU929425A2 |
| ВИБРАЦИОННЫЙ ГАЙКОВЕРТ | 1998 |
|
RU2182533C2 |
| ВИБРАЦИОННЫЙ ГАЙКОВЕРТ | 1994 |
|
RU2081741C1 |
| Гайковерт инерционный | 1979 |
|
SU848335A1 |
| Гайковерт | 1990 |
|
SU1770116A1 |
| Гайковерт | 1978 |
|
SU753628A1 |
| Гайковерт для крупных резьбовыхСОЕдиНЕНий | 1979 |
|
SU814706A1 |
| Гайковерт | 1985 |
|
SU1305020A1 |
| Ударный гайковерт | 1987 |
|
SU1468736A1 |