ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится в целом к подъемникам и, в частности, к системе для определения скорости и положения подъемника.
УРОВЕНЬ ТЕХНИКИ
[0002] В современном обществе подъемники стали повсеместно распространенными машинами для обеспечения транспортировки людей и грузов через многоэтажные здания. Поскольку подъемники эксплуатируются непрерывно в течение всего дня и производят частые остановки на различных уровнях этажей, система, отслеживающая состояние безопасности подъемника, играет важную роль в обеспечении его надежной эксплуатации.
[0003] Правилами обеспечения безопасности в отношении подъемников требуется, помимо прочего, осуществлять проверку скорости подъемника при его приближении к конечной площадке для того, чтобы убедиться в обеспечении возможности уменьшения скорости до разумного безопасного значения при его приближении к указанной площадке. Одним широко применяемым известным способом является использование выключателей и кулачковых упоров для определения факта замедления подъемника. Однако установка выключателей и кулачковых упоров является довольно затратной, не упоминая при этом о значительных работах по необходимому обслуживанию этих выключателей и кулачковых упоров.
[0004] Еще одним способом, применяемым в настоящее время для определения скорости подъемника, является использование системы позиционирования подъемника. Многие известные системы позиционирования подъемников используют информацию о положении кабины подъемника, которую получают от кодирующих устройств и/или выключателей, для определения не только положения кабины подъемника, но и ее скорости. Установка таких систем позиционирования также является довольно затратной.
[0005] В свете вышеизложенного, остается актуальным вопрос эффективного с точки зрения затрат усовершенствования системы для определения скорости и положения кабины подъемника.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0006] В соответствии с одним аспектом настоящего изобретения раскрыт подъемник, размещенный в подъемном отделении в качестве его составной части и имеющий систему для определения скорости и положения. Подъемник может содержать компонент подъемника, размещенный в подъемном отделении в качестве его составной части, оптический датчик, размещенный в подъемном отделении в качестве его составной части, объект, размещенный в подъемном отделении в качестве его составной части таким образом, чтобы быть выровненным по траектории оптического датчика, и процессор, в рабочей конфигурации соединенный с оптическим датчиком. Оптический датчик может быть выполнен с возможностью испускания сигнала и приема отраженного сигнала, являющегося отражением испущенного сигнала. Указанный объект может иметь признаки, относящиеся к поверхности, от которой указанный сигнал может быть отражен. Процессор может быть выполнен с возможностью обработки отраженного сигнала для обеспечения создания выходных данных, содержащих информацию о скорости и положении компонента подъемника.
[0007] В соответствии еще с одним аспектом изобретения, раскрыт подъемник с системой для определения скорости и положения. Подъемник может быть выполнен содержащим кабину подъемника, оптический датчик, в рабочей конфигурации соединенный с кабиной подъемника, неподвижный объект, связанный с оптическим датчиком таким образом, чтобы быть выровненным по траектории оптического датчика, и процессор, в рабочей конфигурации соединенный с оптическим датчиком. Оптический датчик может быть выполнен с возможностью испускания сигнала и приема отраженного сигнала, являющегося отражением испущенного сигнала. Неподвижный объект может иметь признаки, относящиеся к поверхности, от которых происходит отражение указанного сигнала. Процессор может быть выполнен с возможностью обработки отраженного сигнала для обеспечения создания выходных данных, содержащих информацию о скорости и положении кабины подъемника.
[0008] В соответствии еще с одним аспектом изобретения раскрыт способ определения скорости и положения компонента подъемника. Данный способ может включать: обеспечение использования оптического датчика, выполненного с возможностью испускания и приема сигналов; обеспечение использования объекта, выровненного по траектории оптического датчика и выполненного с возможностью отражения сигналов; обеспечение использования процессора, соединенного в рабочей конфигурации с оптическим датчиком и выполненного с возможностью обработки отраженных сигналов, принятых оптическим датчиком; испускание сигнала от оптического датчика на указанный объект; прием отраженного сигнала, отраженного от указанного объекта; обработку отраженного сигнала, принятого оптическим датчиком; и обеспечение создания выходных данных, содержащих информацию о скорости и положения компонента подъемника.
[0009] Эти и другие аспекты раскрытия настоящего изобретения станут более очевидными из прочтения последующего подробного описания изобретения, рассматриваемого вместе с сопроводительными чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0010] На фиг.1 показан вариант реализации подъемника, выполненного в соответствии с основными положениями настоящего изобретения.
[0011] На фиг.2 показан вариант реализации системы для определения скорости и положения подъемника, выполненной в соответствии с основными положениями настоящего изобретения.
[0012] На фиг.3 показан еще одним вариант реализации системы для определения скорости и положения для подъемника, выполненной в соответствии с основными положениями настоящего изобретения.
[0013] На фиг.4 также показан еще одним вариант реализации системы для определения скорости и положения для подъемника, выполненной в соответствии с основными положениями настоящего изобретения.
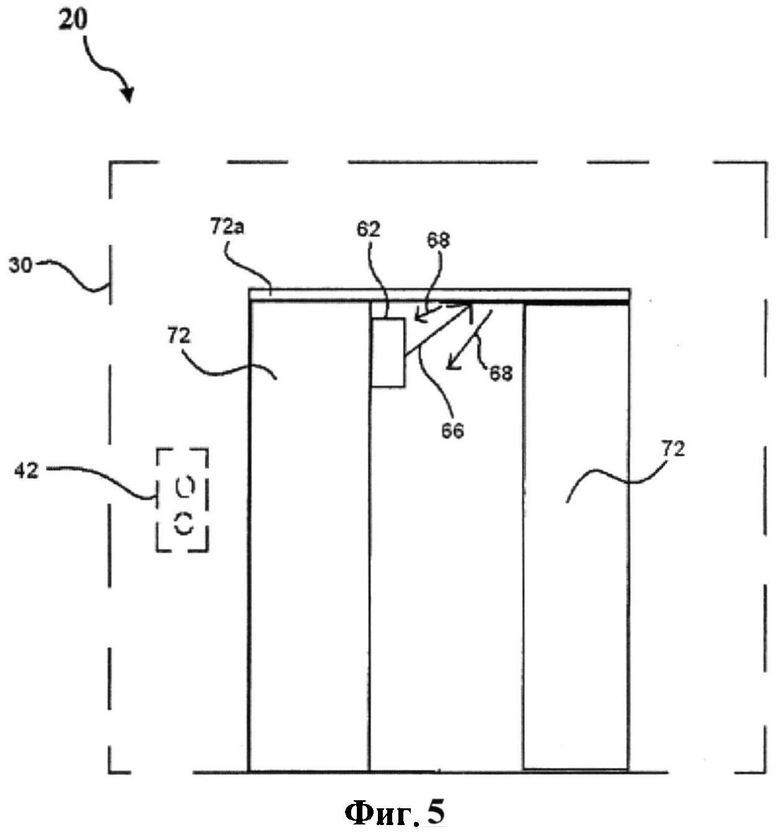
[0014] На фиг.5 показан еще одним вариант реализации системы для определения скорости и положения для подъемника, выполненной в соответствии с основными положениями настоящего изобретения.
[0015] На фиг.6 также показан еще один вариант реализации системы для определения скорости и положения для подъемника, выполненной в соответствии с основными положениями настоящего изобретения.
[0016] Несмотря на то что настоящее изобретение может быть реализовано в различных модификациях и альтернативных конструкциях, на чертежах показаны конкретные иллюстративные варианты его осуществления, подробно описанные ниже. При этом необходимо подчеркнуть, что не следует толковать раскрытые конкретные формы в качестве ограничивающих объем предлагаемого изобретения, а наоборот следует рассматривать все модификации, альтернативные конструкции и эквиваленты как входящие в объем предлагаемого изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
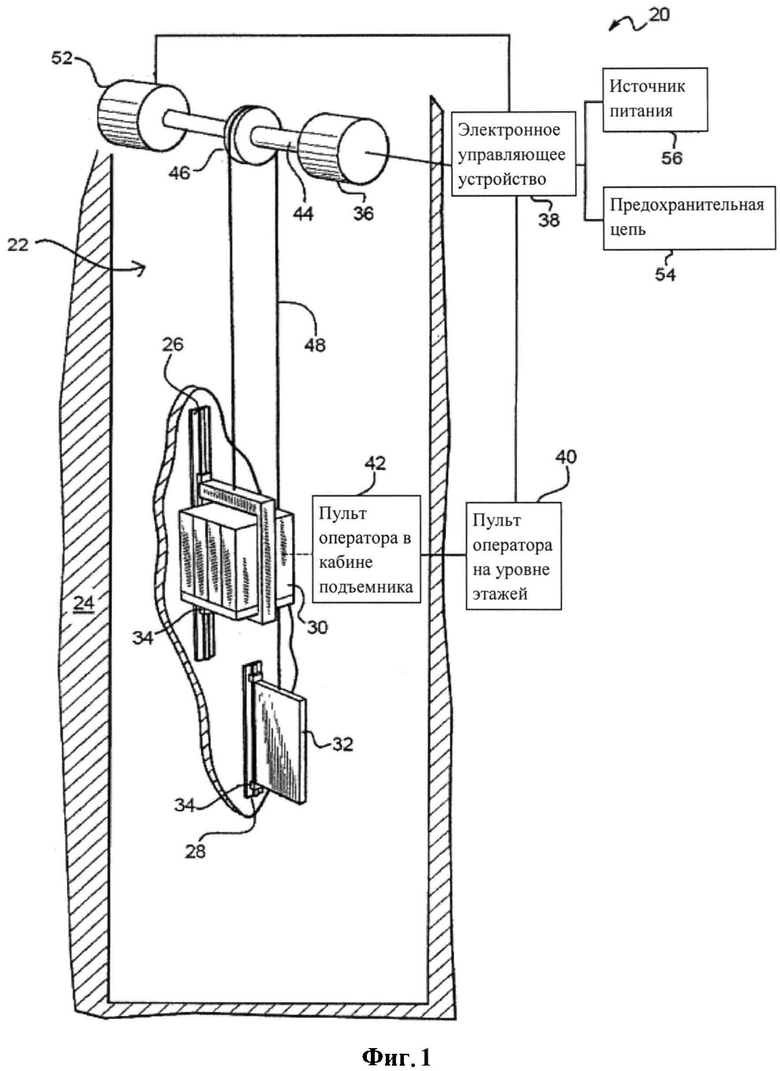
[0017] На фиг.1 показана подъемная система 20 в схематическом виде. Следует отметить, что вариант подъемной системы 20 показан на фиг.1 только в целях иллюстрации для репрезентативного представления основы для различных компонентов подъемной системы в целом.
[0018] Как показано на фиг.1, подъемная система 20 может быть выполнена содержащей подъемное отделение 22, размещенное вертикально внутри многоэтажного здания 24. Обычное подъемное отделение 22 может быть выполнено в виде полой шахты, размещенной в центральной части здания 24, при этом может быть выполнено несколько подъемных отделений, если здание имеет достаточный размер и содержит несколько подъемников. Могут быть выполнены направляющие 26 и 28, проходящие по существу вдоль подъемного отделения 22. Кабина 30 подъемника может быть установлена с возможностью перемещения на двух направляющих 26 (для простоты на фиг.1 показана только одна направляющая 26), а противовес 32 может быть установлен с возможностью перемещения на двух направляющих 28 (для простоты на сриг.1 показана только одна направляющая 28). Несмотря на то что на фиг.1 это подробно не показано, специалисту в данной области техники очевидно, что и кабина 30, и противовес 32 могут быть выполнены содержащими роликовые блоки 34, подшипники и тому подобные средства для обеспечения ровного перемещения вдоль направляющих 26 и 28. Указанные роликовые блоки, подшипники и тому подобные средства могут также быть установлены с возможностью перемещения на направляющих 26 и 28 при обеспечении надежности.
[0019] Для обеспечения перемещения кабины 30 и таким образом пассажиров и/или грузов, загруженных в нее, в верхней части подъемного отделения 22 обычно может быть размещен двигатель 36. С двигателем 36 может быть электрически соединено электронное управляющее устройство 38, которое, в свою очередь, может быть электрически соединено с несколькими пультами 40 оператора, размещенными на каждом этаже для вызова кабины 30 подъемника, а также пультами 42 оператора, размещенными на каждой кабине 30 для обеспечения ее пассажирам возможности указания направления кабины 30. С электронным управляющим устройством 38 также может быть электрически соединена предохранительная цепь 54, а также источник 56 питания. От двигателя 36 может механически проходить приводной вал 44, который, в свою очередь, может в рабочей конфигурации быть соединен с канатоведущим шкивом 46 и, кроме того, может проходить для обеспечения рабочего соединения с системой 52 торможения. Система 52 торможения также может быть выполнена электрически соединенной с электронным управляющим устройством 38. Вокруг шкива 46 может быть протянут натяжной элемент 48, такой как канат круглого сечения или плоский ремень. Натяжной элемент 48, в свою очередь, может в рабочей конфигурации быть соединен с противовесом 32 и кабиной 30 подъемника с использованием любой подходящей системы канатов. Конечно, возможны несколько различных вариантов осуществления или размещения этих компонентов с обычной системой, включающей несколько натяжных элементов 48, а также различные варианты размещения двигателя и шкивов подъемной системы 20.
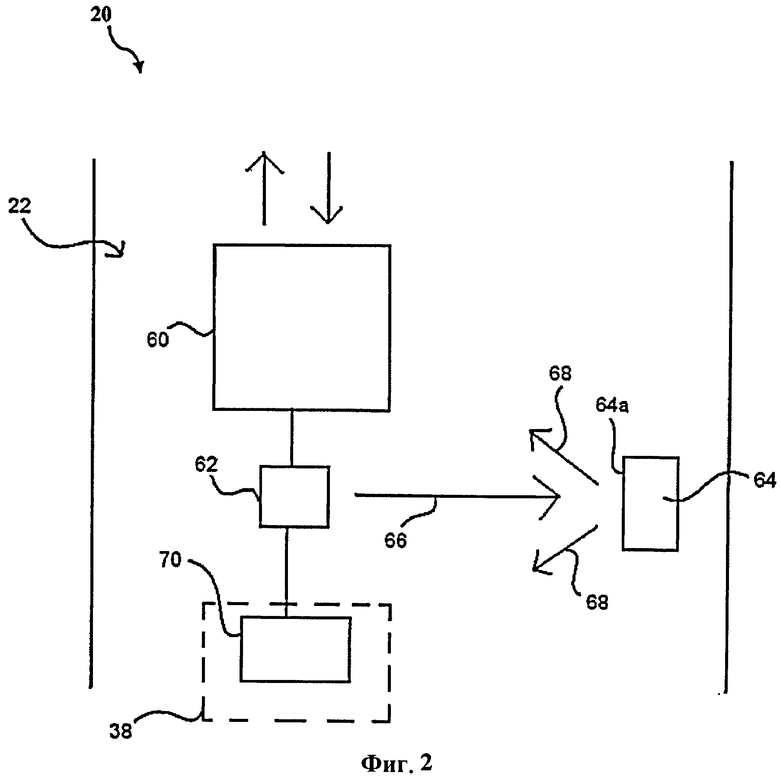
[0020] На фиг.2 раскрыта система для определения скорости и положения для подъемной системы 20. Система для определения скорости и положения может быть выполнена содержащей оптический датчик 62, объект 64 и процессор 70. Оптический датчик 62 может в рабочей конфигурации быть соединен с компонентом 60 подъемника, таким как, помимо прочего, кабина 30 подъемника. Оптический датчик 62 может быть выполнен с возможностью испускания и приема сигналов. Объект 64 может быть расположен в подъемном отделении 22 таким образом, чтобы быть выровненным по траектории оптического датчика 62, и может иметь признаки 64а, относящиеся к поверхности, которые могут отражать сигналы, испущенные оптическим датчиком 62. Процессор 70 может быть выполненным встроенным в электронное управляющее устройство 38 и в рабочей конфигурации соединенным с оптическим датчиком 62. Следует отметить, что процессор 70 не обязательно должен быть выполнен размещенным внутри электронного управляющего устройства 38 и что он может быть выполнен в виде свободной расположенной схемы или встроенным в какой-либо другой компонент внутри подъемника 20. Кроме того, процессор 70 может быть выполнен с возможностью обработки сигналов, принятых от оптического датчика 62, и выработки выходных данных, содержащих информацию о скорости и положении компонента 60 подъемника.
[0021] По мере перемещения компонента 60 подъемника в подъемном отделении 22 оптический датчик 62 может испускать сигнал 66 на объект 64. Сигнал 66 затем может быть отражен от признаков 64а, относящихся к поверхности, объекта 64. Отраженный сигнал 68 затем может быть принят оптическим датчиком 62 с определенной временной задержкой и под определенным углом. В одном примерном варианте осуществления изобретения данные о временной задержке и угле затем могут быть использованы процессором 70 для обработки данных о скорости и положении компонента 60 подъемника. Следует отметить, что иная информация, получаемая из отраженного сигнала 68, как известно специалистам в данной области техники, может быть использована процессором 70 для обеспечения предоставления выходных данных о скорости и положении.
[0022] В одном примерном варианте осуществления изобретения оптический датчик выполнен с возможностью испускания светового сигнала 66, который может быть выработан светоизлучающим диодом (LED) или лазерным диодом. Использование светоизлучающих диодов и лазеров может обеспечить диапазон чувствительности величиной по меньшей мере в несколько миллиметров и при этом их можно применять при измерениях больших расстояний. Оптические датчики, в которых используются светоизлучающие диоды или лазеры, могут быть недорогим и обеспечивающим точность решением для измерения скорости и положения перемещающегося объекта, особенно в подъемнике.
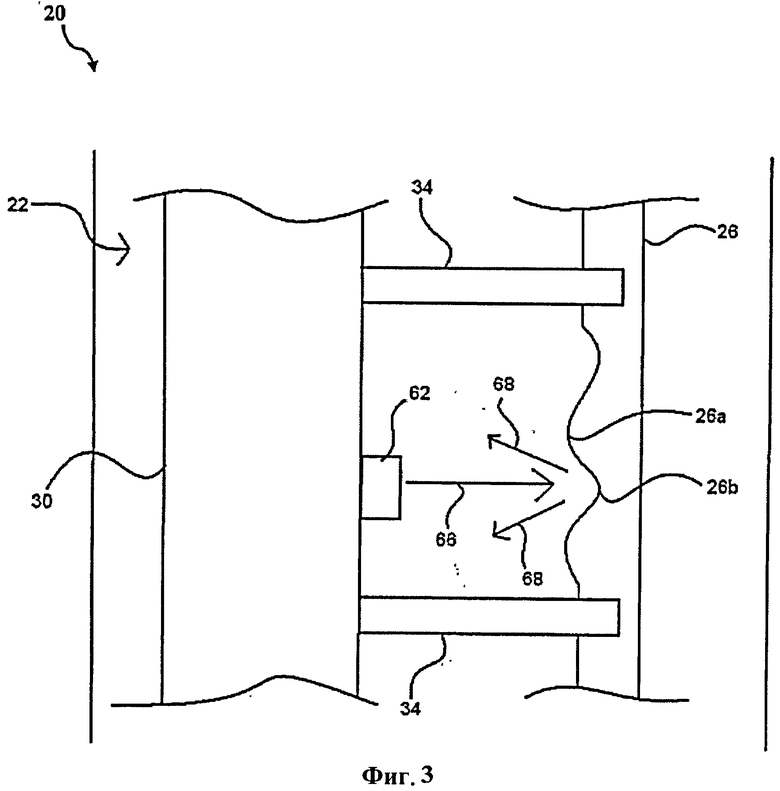
[0023] Как показано на фиг.3, в одном варианте осуществления изобретения оптический датчик 62 может быть в рабочей конфигурации соединен с кабиной 30 подъемника таким образом, чтобы быть выровненным с направляющей 26, проходящей в подъемном отделении 22. Направляющая 26 может иметь ограниченную длину и может иметь дефекты на своей поверхности, такие как небольшие выступы 26а и углубления 26b (которые на фиг.3 в целях иллюстрации показаны увеличенными). При скользящем перемещении кабины 30 подъемника вдоль направляющей 26 оптический датчик 62 может испускать сигналы 66 на направляющую 26. Отраженные сигналы 68, отраженные от выступов и углублений 26а, 26b на направляющей 26 или от стыков или соединений направляющих (не показано), могут быть использованы процессором 70 для определения скорости и положения кабины 30 подъемника. Например, отраженный сигнал 68, отраженный от стыка или соединения направляющих или выступа или углубления 26а, 26b на направляющей 26, может быть принят оптическим датчиком 62 и сохранен процессором 70. На этой стадии процессор 70 может совершать обработку отраженного сигнала 68 для определения текущего положения и скорости кабины 30 подъемника. В одном примерном варианте осуществления изобретения текущее положение может быть получено путем обращения к опорным данным предварительного сканирования направляющей 26, идентифицирующего все места стыков или соединений направляющих, выступов и углублений 26а, 26b, которые могут быть сохранены в памяти процессора 70. Скорость кабины 30 подъемника может быть определена по указанным временной задержке и углу между испусканием сигнала 66 и приемом отраженного сигнала 68.
[0024] При продолжающемся перемещении кабины 30 подъемника вдоль направляющей 26 второй отраженный сигнал 68, отраженный от второго выступа или углубления 26а, 26b на направляющей 26, может быть принят оптическим датчиком 62 и сохранен процессором 70. На этой стадии процессор 70 может совершать обработку второго отраженного сигнала 68 для определения текущего положения и скорости кабины 30 подъемника, как раскрыто ранее. Еще в одном варианте реализации изобретения может быть использована временная задержка между двумя отраженными сигналами 68, сохраненными в процессоре 70, для определения скорости и положения кабины 30 подъемника.
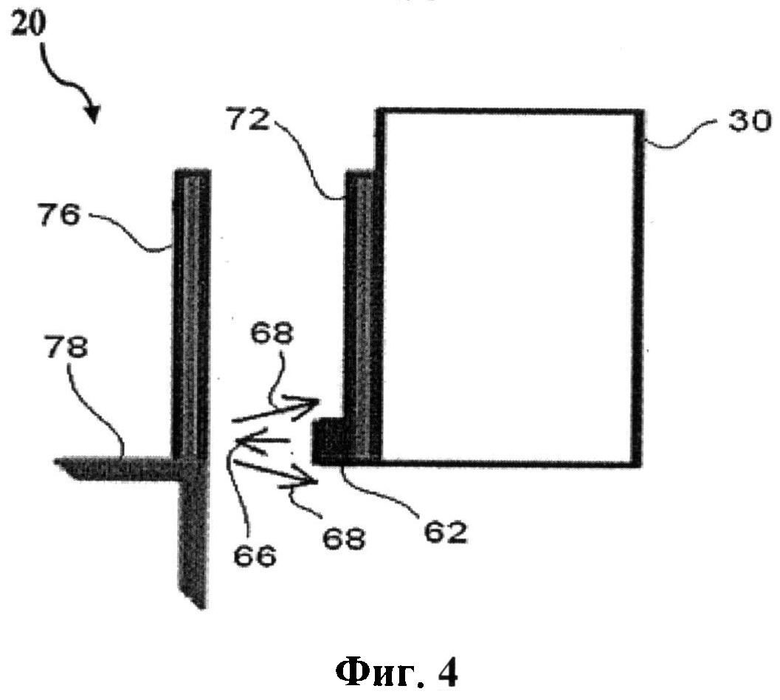
[0025] Еще в одном варианте осуществления изобретения, показанном на фиг.4, оптический датчик 62 может быть в рабочей конфигурации соединен с кабиной 30 подъемника таким образом, чтобы быть выровненным с дверью подъемника 72. При приближении кабины 30 к уровню 78 этажа оптический датчик 62 может испускать сигналы 66 на дверь 76 подъемного отделения. Сигналы 68, отраженные от двери 76 подъемного отделения, могут быть приняты оптическим датчиком 62 и, кроме того, обработаны процессором 70 для определения точного положения двери 72 подъемника.
[0026] Еще в одном варианте осуществления изобретения, показанном на фиг.5, оптический датчик 62 может быть в рабочей конфигурации соединен с дверью 72 кабины подъемника таким образом, чтобы быть выровненным с направляющим рельсом 72а двери подъемника. При открывании и закрывании двери 72 подъемника оптический датчик 62 может испускать сигналы 66 на направляющий рельс 72а двери подъемника. Сигналы 68, отраженные от направляющего рельса 72а двери подъемника, могут быть приняты оптическим датчиком 62 и, кроме того, обработаны процессором 70 для определения скорости и положения двери 72 подъемника.
[0027] Еще в одном варианте осуществления изобретения, показанном на фиг.6, оптические датчики 62 могут быть в рабочей конфигурации соединены с кабиной 30 подъемника и стеной 22а подъемного отделения 22. В подъемном отделении 22 возле каждого уровня 78 площадки может в рабочей конфигурации быть выполнено соединение отметки 74 уровня, имеющей признаки 74а, относящиеся к поверхности. Признаки 74а, относящиеся к поверхности, могут быть реализованы в виде линий, идентифицирующих каждый уровень 78 площадки, таких как, помимо прочего, отметки, выполненные в виде штрихового кода, числа и любые оптически распознаваемые линии, имеющие различные формы и ориентации. Например, на уровне "3" линии 74а на отметке 74 уровня могут показывать число "3", отметки, выполненные в виде штрихового кода, представляющие число "3", или иметь какие-либо другие форму и ориентацию, что процессор 70 может идентифицировать как число "3". Каждый уровень 78 площадки может также иметь дверь 76 подъемного отделения, удерживающую пассажиров от входа в подъемное отделение 22 до того, как кабина 30 подъемника будет на месте.
[0028] При вертикальном перемещении кабины 30 подъемника в подъемном отделении 22 оптический датчик 62, соединенный с кабиной 30, может испускать сигнал 66 на каждую отметку 74 уровня, которую он проходит. Сигналы 68, отраженные от признаков 74а, относящихся к поверхности, от каждой отметки 74 уровня, затем могут быть приняты оптическим датчиком 62 и сохранены процессором 70. В одном примерном варианте осуществления изобретения процессор 70 выполнен с возможностью определения положения кабины 30 подъемника на основе сигналов 68, отраженных от признаков 74а, относящихся к поверхности, каждой отметки 74 уровня, а также скорости кабины 30 на основе временной задержки между моментом, когда датчик 62 проходит первую отметку 74 уровня, до момента, когда оптический датчик 62 проходит вторую отметку 74 уровня. Оптические датчики 62 соединены со стеной 22а подъемного отделения 22, могут быть выровнены по траектории каждой двери 76 подъемного отделения. Эти оптические датчики 62 могут обнаруживать факт присутствия или отсутствия двери 76 подъемного отделения. Если дверь 76 подъемного отделения отсутствует, процессор 70 может определить присутствие кабины 30 подъемника на основе отраженных сигналов 68, принятых оптическими датчиками 62. Если и кабина 30 подъемника отсутствует, тогда процессор 70 может осуществить переключение предохранительной цепи 54, указывающей на обнаружение небезопасных условий.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
[0029] В свете вышеизложенного можно отметить, что настоящим изобретением предложена система для определения скорости и положения подъемника. Подъемники постоянно используются для транспортировки пассажиров с одного этажа на другой. Предлагаемой системой для определения скорости и положения подъемника может быть обеспечена надежность эксплуатации кабины подъемника с безопасной скоростью и обеспечена возможность нахождения кабины подъемника в необходимом положении. Кроме того, указанная система для определения скорости и положения подъемника обеспечивает возможность удовлетворения другим правилам и нормам безопасности, таким как, помимо прочего, в отношении присутствия или отсутствия двери подъемного отделения. Использование оптических датчиков, в которых могут использоваться светоизлучающие диоды и лазерные диоды для испускания сигналов, может быть недорогим и обеспечивающим надежность решением для определения скорости и положения компонента подъемника. Оптические датчики обеспечивают возможность надежного использования как при измерениях коротких расстояний, так и при измерениях больших расстояний, вследствие чего также обеспечивается их универсальность.
[0030] Несмотря на то что в данном документе приведены только конкретные варианты осуществления изобретения, его альтернативные варианты и модификации будут очевидны специалистам в данной области техники из приведенного выше описания. Эти и другие альтернативные варианты осуществления изобретения считаются эквивалентными и охватываются приведенным раскрытием изобретения.
Изобретение относится к области управления подъемниками.
Подъемная система (20) содержит оптические датчики (62), выполненные в виде светоизлучающего диода (LED) или лазерного диода, процессор (70), уровень (78) площадки. При контроле лифтовой установки, перемещают вертикально кабину (30) подъемника в подъемном отделении (22). Оптический датчик (62), соединенный с кабиной (30), испускает сигнал (66) на каждую отметку (74) уровня, которую он проходит. Сигналы (68), отраженные от признаков (74а), относящихся к поверхности (штрихового кода, числа, любых оптически распознаваемых линий), от каждой отметки (74) уровня, затем могут быть приняты оптическим датчиком (62) и сохранены процессором (70). Достигается определение положения и скорости кабины подъемника, определение двери шахты лифта, снижение стоимости контроля подъемника. 3 н. и 17 з.п. ф-лы, 6 ил.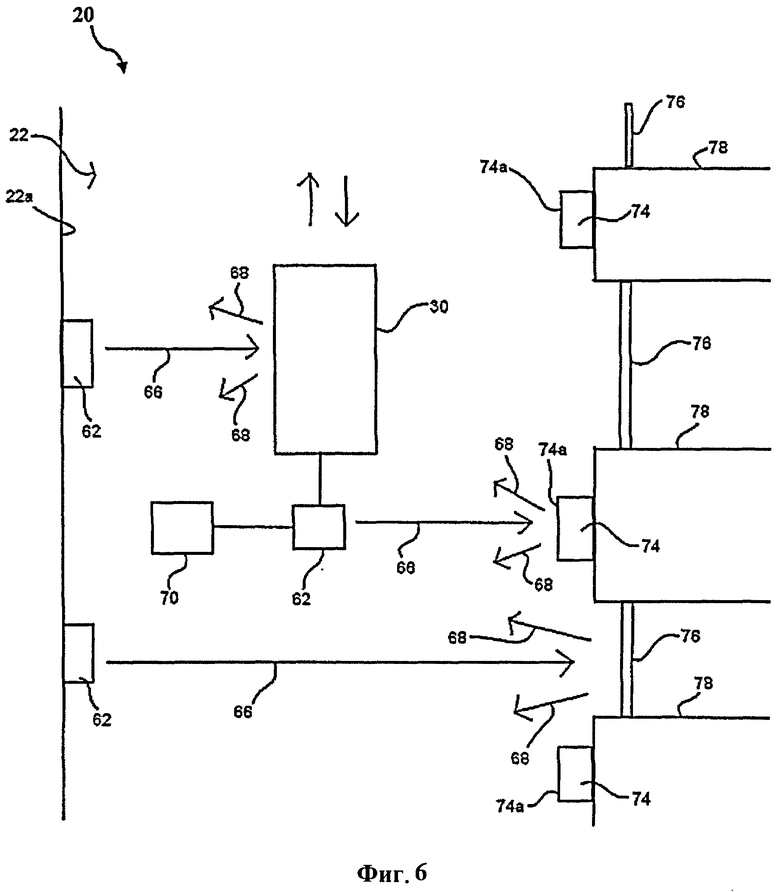
1. Подъемная система (20), содержащая подъемное отделение (22) и систему (62, 64, 70) для определения скорости и положения, содержащая:
компонент (60) подъемника, размещенный в подъемном отделении (22) в качестве его составной части;
оптический датчик (62), размещенный в подъемном отделении (22) в качестве его составной части и выполненный с возможностью испускания сигнала (66) и приема отраженного сигнала (68), являющегося отражением испущенного сигнала (66);
объект (64), размещенный в подъемном отделении (22) таким образом, чтобы быть выровненным по траектории оптического датчика (62), и имеющий признаки (64а), относящиеся к поверхности; и
процессор (70), соединенный в рабочей конфигурации с оптическим датчиком (62) и выполненный с возможностью обработки отраженного сигнала (68) для обеспечения создания выходных данных, содержащих информацию о скорости и положении компонента (60) подъемника.
2. Подъемная система (20) по п.1, в которой
оптический датчик (62) в рабочей конфигурации соединен с компонентом (60) подъемника, а
указанный объект (64) неподвижно закреплен в подъемном отделении (22) таким образом, что при перемещении компонента (60) подъемника, отраженный сигнал (68), отраженный от объекта (64), используется для обработки данных о скорости и положения компонента (60) подъемника.
3. Подъемная система (20) по п.1, в которой оптический датчик (62) выполнен с возможностью испускания сигнала (66), выработанного элементом группы, содержащей светоизлучающий диод и лазерный диод.
4. Подъемная система (20) по п.1, в которой оптический датчик (62) имеет диапазон чувствительности величиной от нескольких миллиметров до ширины подъемного отделения (22).
5. Подъемная система (20) по п.1, в которой
оптический датчик (62) соединен в рабочей конфигурации со стеной (22а) подъемного отделения (22), а
указанный объект (64) выполнен в виде двери (76) подъемного отделения таким образом, что при испускании оптическим датчиком (62) сигнала (66) на дверь (76) подъемного отделения, отраженный сигнал (68), отраженный от двери (76) подъемного отделения, используется для обработки данных о присутствии или отсутствии двери (76) подъемного отделения.
6. Подъемная система (20) по п.1, в которой компонент (60) подъемника выбран из группы, содержащей кабину (30) подъемника, дверь (72) подъемника и другие подвижные компоненты в подъемной системе (20).
7. Подъемная система (20) по п.6, в которой
оптический датчик (62) соединен в рабочей конфигурации с кабиной (30) подъемника,
указанный объект (64) выполнен в виде направляющей (26), проходящей в подъемном отделении (22), а
признаки (64а), относящиеся к поверхности, реализованы в виде выступов и углублений (26а, 26b) на направляющей (26) таким образом, что при скользящем перемещении кабины (30) подъемника вдоль направляющей (26) и испускании оптическим датчиком (62) сигнала (66) на направляющую (26) сигналы (68), отраженные от выступов и углублений (26а, 26b), используются для обработки данных о скорости и положении кабины (30) подъемника.
8. Подъемная система (20) по п.6, в которой оптический датчик (62) в рабочей конфигурации соединен с дверью (72) кабины подъемника таким образом, чтобы быть выровненным с направляющим рельсом (72а) двери подъемника таким образом, что при испускании оптическим датчиком (62) сигнала (66) на направляющий рельс (72а) двери подъемника, при открывании и закрывании двери (72), отраженный сигнал (68), отраженный от направляющего рельса (72а) двери подъемника, используется для обработки данных о скорости и положении двери (72) подъемника.
9. Подъемная система (20) по п.6, в которой
оптический датчик (62) в рабочей конфигурации соединен с кабиной (30) подъемника,
указанный объект (64) выполнен в виде отметки (74) уровня, связанной с каждым уровнем (78) площадки в подъемном отделении (22), а
признаки (64а), относящиеся к поверхности, реализованы в виде линий (74а), идентифицирующих каждый уровень (78) площадки таким образом, что при перемещении кабины (30) подъемника и испускании оптическим датчиком (62) сигнала (66) на отметку (74) уровня отраженный сигнал (68), отраженный от указанных линий.(74а), используется для обработки данных о скорости и положении кабины (30) подъемника и для идентификации каждого уровня (78) площадки.
10. Подъемная система (20) по п.9, в которой линии (74а), идентифицирующие каждый уровень (78) площадки, выбраны из группы, содержащей отметки, выполненные в виде штрихового кода, числа и оптически распознаваемые линии различных форм и ориентации.
11. Подъемная система (20) с системой (62, 64, 70) для определения скорости и положения, содержащая:
кабину (30) подъемника;
оптический датчик (62), соединенный в рабочей конфигурации с кабиной (30) подъемника и выполненный с возможностью испускания сигнала (66) и приема отраженного сигнала (68), являющегося отражением испущенного сигнала (66);
неподвижный объект (64), связанный с оптическим датчиком (62) таким образом, чтобы быть выровненным по траектории оптического датчика (62), и имеющий признаки (64а), относящиеся к поверхности; и
процессор (70), соединенный в рабочей конфигурации с оптическим датчиком (62) и выполненный с возможностью обработки отраженного сигнала (68) для обеспечения создания выходных данных, содержащих информацию о скорости и положении кабины (30) подъемника.
12. Подъемная система (20) по п.11, в которой
неподвижный объект (64) выполнен в виде направляющей (26), проходящей внутри подъемного отделения (22), а
признаки (64а), относящиеся к поверхности, реализованы в виде выступов и углублений (26а, 26b) на направляющей (26).
13. Подъемная система (20) по п.12, в которой оптический датчик (62) выполнен с возможностью испускания сигнала (66) на направляющую (26) и получения отраженного сигнала (68), отраженного от выступов и углублений (26а, 26b), для обработки данных о скорости и положении кабины (30) подъемника.
14. Подъемная система (20) по п.11, в которой
неподвижный объект (64) выполнен в виде отметки (74) уровня, связанной с каждым уровнем (78) площадки внутри подъемного отделения (22), а
признаки (64а), относящиеся к поверхности, реализованы в виде линий (74а), идентифицирующих каждый уровень (78) площадки.
15. Подъемная система (20) по п.14, в которой линии (74а), идентифицирующие каждый уровень (78) площадки, выбраны из группы, содержащей отметки, выполненные в виде штрихового кода, числа и оптически распознаваемые линии различных форм и ориентации.
16. Подъемная система (20) по п.14, в которой оптический датчик (62) выполнен с возможностью испускания сигнала (66) на отметку (74) уровня и приема отраженного сигнала (68), отраженного от линий (74а), для обработки данных о скорости и положении кабины (30) подъемника и идентификации уровня (78) площадки.
17. Подъемная система (20) по п.11, в которой оптический датчик (62) выполнен с возможностью испускания сигнала (66), выработанного элементом группы, содержащей светоизлучающий диод и лазерный диод.
18. Подъемная система (20) по п.11, в которой оптический датчик (62) имеет диапазон чувствительности величиной от нескольких миллиметров до ширины подъемного отделения (22).
19. Способ определения скорости и положения компонента (60) подъемника, включающий:
обеспечение использования оптического датчика (62), выполненного с возможностью испускания и приема сигналов (66, 68);
обеспечение использования объекта (64), выровненного по траектории оптического датчика (62) и выполненного с возможностью отражения сигналов (68);
обеспечение использования процессора (70), соединенного в рабочей конфигурации с оптическим датчиком (62) и выполненного с возможностью обработки отраженных сигналов (68), принятых оптическим датчиком (62);
испускание сигнала (66) от оптического датчика (62) на указанный объект (64);
прием отраженного сигнала (68), отраженного от указанного объекта (64);
обработку отраженного сигнала (68), принятого оптическим датчиком (62); и
обеспечение создания выходных данных, содержащих информацию о скорости и положении компонента (60) подъемника.
20. Способ по п.19, в котором обеспечение выходных данных, содержащих информацию о скорости и положении компонента (60) подъемника, выполняют при перемещении по меньшей мере оптического датчика (62) и объекта (64).
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

