Изобретение относится к области техники автомобильной охранной сигнализации и может быть использовано для определения местонахождения угнанных автомобилей в процессе их движения по автотрассам.
Сегодня остро стоит проблема поиска угнанных авто. Известные средства защиты от угона автомобиля, такие, например, как жучки «Автофон» [1], позволяют отслеживать положение автомобиля по системе спутниковой навигации GPS, по положению излучающей станции оператора сотовой связи GSM. Автоугонщики хорошо осведомлены о наличии такого рода «жучков» и при угоне предпринимают меры на их подавление. Для чего используют системы «глушилок» как сотовой связи [2], так и против сигналов GPS [3]. Уже используют и возможно будут использовать «глушилки» на другие средства связи, например 3G/UMTS 2100 МГц, СОМА 450 МГц, 4G/LTE800 МГц, 4G/LTE2500 МГц. В момент угона автомобиля угонщики включают «глушилки» и не выключают их до момента привоза автомобиля в так называемый «отстойник» или специальный подземный гараж, блокирующий сигналы GSM и GPS. Поэтому системы [1] оказываются неэффективными. В дополнение к использованию систем [1] целесообразно вести поиск угонщика по самим «глушилкам», т.е. определять положение «глушилок» и соответственно потенциального угонщика.
Наиболее близким решением в этом плане является технология, описанная в [3]. Она состоит в следующем.
Подавители представляют серьезную угрозу будущему интеллектуальных транспортных систем. Их использование запрещено законодательно, а их противозаконное использование может преследоваться в судебном порядке. Чтобы знать точное число работающих подавителей, нужно разместить детекторы подавителей на специальных точках и вести запись помех. Удачными местами расположения таких детекторов для начальных замеров могут послужить магистральные развязки.
При проведении теста на обнаружение помех была проведена запись с использованием пяти статичных приемников, размещенных в центральной части лаборатории GATE.
Обнаружение источника помех основано на мониторинге соотношения сигнал-шум подавителя (JNR). Для преследования злоумышленников, создающих помехи, необходимо установить, с какого подавителя идет помеха. Поэтому сигнал был проанализирован в частотно-временном интервале на характерный ЛЧМ-сигнал подавителя. Усиление входного каскада было установлено на минимальном значении для того, чтобы входной каскад мог покрывать высокую мощность помех.
ЛЧМ-импульс угонщики создают в диапазоне от 9,4 до 44,9 МГц на полосе E1/L1-частот (другие полосы частот не рассматривались). Остальные генерируют гармонические колебания 3 дБ в полосе пропускания около 0,92 МГц и имеют термозависимую резонансную частоту вокруг резонансной частоты Galileo/GPS.
Сначала были записаны сигналы при помощи ЛЧМ-подавителя, расположенного в центральной точке. Подавитель находится за пределами автомобиля в зоне прямой видимости. Измерения в этом положении на расстоянии 200 метров от подавителя по кратковременным преобразованиям Фурье сигнала ясно показывают присутствие ЛЧМ-сигнала.
Во время второго замера подавитель был помещен в автомобиль. Автомобиль выехал из некоего положения, где был активирован подавитель, и проехал по главной улице мимо детектора. Затем автомобиль развернулся и поехал тем же самым путем. Снимали показатели JNR.
Замеры деградации значения C/N0 для GPS PRN9 на Рисунке 22 и для GATE PRN 46 показывают, что подавитель может быть обнаружен и идентифицирован в зоне распределенной сети приемника.
Следующим шагом в развитии комплексной сети мониторинга помех является наличие автомобильных GNSS-приемников, способных обнаруживать и сообщать о наличии помех. Для такого сценария был активирован подавитель в одном движущемся автомобиле, а в другом автомобиле, движущемся по той же самой дороге, проводились замеры при помощи приемника ipexSR.
Оба автомобиля выехали из одного положения. Сначала был включен подавитель, после чего был включен приемник со случайным автомобилем в промежутке. Через 170 секунд автомобиль с подавителем был припаркован у обочины, а автомобиль с приемником проехал мимо, что показано единичным всплеском на графике. Через 240 секунд автомобиль с приемником развернулся и проехал мимо подавителя снова. Это показано в виде второго всплеска через 310 секунд. После того как приемник миновал припаркованный автомобиль с подавителем, последний тронулся с места, догнал и обогнал автомобиль с приемником через 450 секунд.
Во время этого замера ни один из автомобилей не смог проследить либо снова принять сигнал. Сообщение о нарушении синхронизма на всех спутниках можно использовать для грубой локализации подавителей.
Анализ показал, что дальность действия подавителя очень сильно зависит от архитектуры приемника. При каждом сценарии подавители оказывали сильное воздействие. После обнаружения помех требовалось смягчить их эффект в приемнике. Предусмотрены такие методы смягчения, как кратковременные трансформации Фурье или волновые пакеты. С помощью программного интерфейса IpexSR можно выполнить и протестировать такие алгоритмы в реальной жизни.
Итогом сказанного заявляется необходимость принимать меры против использования автомобильных подавителей. Для обвинений в использовании подавителей необходимо размещать детекторы. Эта мера также позволит подсчитать количество используемых подавителей. Деградация GNSS-позиционирования представляет собой угрозу использованию интеллектуальных транспортных систем, предназначенных для повышения безопасности вождения. Поэтому предотвращение и смягчение эффекта помех должно стать объектом исследований для разработчиков систем автомобильной связи. С помехами в GNSS-системах необходимо бороться точно так же, как и с прочими опасностями на дорогах.
Данная технология выбрана за прототип.
Достоинством технологии является то, что она показывает возможность обнаружения глушилок и может вести их подсчет. Недостатком технологии является то, что она не описывает, как вести процесс идентификации объекта по наличию в нем подавителей сигналов. По указанной технологии выявить автомобиль с угонщиком среди общего потока машин не представляется возможным.
Между тем, для поимки угонщика важным является как раз обнаружение угнанного автомобиля. Очень часто при угонах владелец автомобиля фиксирует факт угона уже после самого угона и сигнализирует в полицию о краже автомобиля слишком поздно, когда угонщик проехал все посты ГИБДД и, возможно, даже уехал в другую область. Вот почему важно фиксировать процесс идентификации объекта по наличию в нем подавителей сигналов. Если это делать, то станет возможным ловить угонщиков еще до момента, когда владелец автомобиля обнаружит факт угона.
Техническим результатом заявленного изобретения является повышение эффективности обнаружения угнанных автомобилей.
Указанный технический результат достигается за счет того, что способ обнаружения угнанных автомобилей по наличию подавителей сигналов, характеризующийся использованием статичных пунктов контроля, размещенных на автотрассах и содержащих приемники для обнаружения источника помех сигналов GPS, функционирующие на основе мониторинга соотношения сигнал-шум подавителя (JNR), отличающийся тем, что рядом с приемником для обнаружения источника помех сигналов GPS устанавливают приемник для обнаружения источника помех сигналов GSM, не менее одной видеокамеры и узел беспроводной связи, а обнаружение радиопомех проводят антеннами с узкой диаграммой направленности, причем при обнаружении источника помех сигналов GPS и/или сигналов GSM с соответствующего приемника подают сигнал тревоги, по которому с рядом установленной видеокамеры делают фото- или видеосъемку автомобилей, находящихся на автотрассе; затем полученные сведения о типе источника помех радиосигналов и полученные изображения передают с помощью узла беспроводной связи на удаленный сервер, на котором производят запись данных; собранные на сервере данные с множества статичных пунктов контроля, установленных в разных местах автотрассы, далее обрабатываются посредством выделения однотипных сигналов помех, по которым производят анализ изображений всех автомобилей, проезжавших мимо статических пунктов, с последующим определением динамики и направления движения автомобилей, в группе которых находится источник радиопомех, их номерных знаков, и далее при обнаружении номерных знаков тех автомобилей, которые были зафиксированы камерами слежения в момент обнаружения источника радиопомех, сведения о номерах автомобилей и динамике их движения передают на посты дорожно-патрульной службы, находящиеся в ближайших зонах от последнего места, где был зафиксирован последний источник радиопомех.
Осуществление изобретения
Заявленный способ может быть реализован, например, посредством выстраивания следующей адаптивной системы. Это позволяет системе «подстроиться» под существующий локальный район. Для этого статичный пункт контроля ставят в заданный район. Выбирают диапазоны для контроля (какой тип подавителя сигналов будем выявлять и на какие диапазоны: GSM 900, DCS 1800, 3G/UMTS 2100, 3G/UMTS 900, CDMA 450, 4G/LTE800, 4G/LTE2500, Wi-Fi и др.). Система «запоминает» соотношения уровень шума/сигнала (для каждого диапазона для каждого значения несущей частоты).
Далее система может быть настроена оператором «вручную» исходя из условий:
- какого типа подавитель сигналов будем выявлять (какие диапазоны будут контролироваться);
- какой порог срабатывания сигнализации (например, превышения сигнал/шум на 10 ДБ);
- достаточно ли будет превышения во всем диапазоне (например, во всем диапазоне GSM) или достаточно только в какой-то части диапазона;
- возможность сравнения превышения сигнал/шум в одном диапазоне с другим (например, резко появился большой уровень сигнала в диапазоне GSM DownLink 925-960 МГц, наша система берет близкий диапазон 900-920), если в данном диапазоне тоже наблюдается в это же время резкое превышение, то скорее всего работает какая-то широкополосная помеха, которая не представляет интереса. Если же нет, то скорей всего глушат целенаправленно именно сигналы GSM и система срабатывает. Аналогично и для других систем связи. То есть наша система более интеллектуальная - при задании оператором данного режима наше изобретение будет выявлять не все подряд подавители сигналов, а только те, которые работают на частотах определенных видов средств связи.
Эталонные данные для оценки превышений соотношения сигнал/шум подавителя могут быть собраны экспериментальным путем, для чего берут легковой автомобиль, в него помещают разные типы подавителей радиосигналов («глушилки»), затем тестируют автомобиль проездом под детекторами на скоростях, например, от 1 до 180 км/час, причем детекторы поднимают на разные уровни высоты. Система «запоминает» максимальные и минимальные параметры (уровень сигнала/шума, диапазоны, сравнение с близкими диапазонами (см. выше)) при проезде авто с «глушилкой», что позволяет системе выявлять с большей вероятностью авто с «глушилкой» именно в данном локальном районе при конкретной установке на определенной высоте. Антенная система с узкой диаграммой направленностью дает малое «пятно» под системой детектирования подавителей радиосигналов, если она расположена где-то вверху.
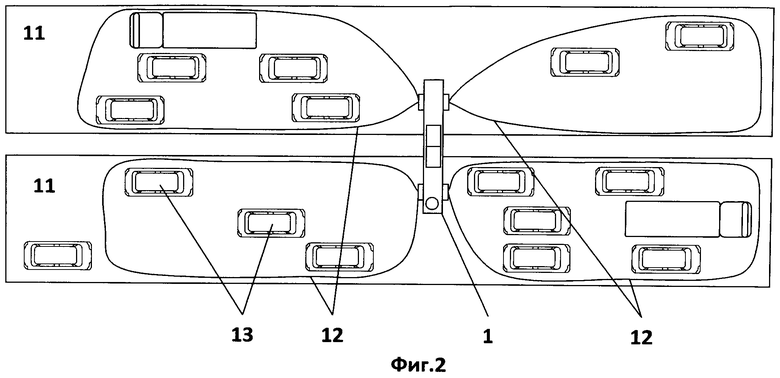
Статичные пункты контроля (1) (см. Фиг.1, Фиг.2) размещают на автотрассах (11). Пункты контроля (1) содержат приемники для обнаружения источника помех сигналов GPS (4) и приемники для обнаружения источника помех сигналов GSM (5), функционирующие на основе мониторинга соотношения сигнал-шум подавителя.
Рядом с приемниками (4, 5) устанавливают видеокамеры (2) и узел беспроводной связи (6). Обнаружение радиопомех приемниками (4, 5) проводят антеннами (3) с узкой диаграммой направленности.
В случае обнаружения источника помех сигналов GPS и/или сигналов GSM с соответствующего приемника подают сигнал тревоги, по которому с рядом установленных видеокамер (2) делают фото- или видеосъемку автомобилей (13), находящихся на автотрассе (11) в зонах (12) возможного действия «глушителей».
Полученные сведения о типе источника помех радиосигналов и полученные изображения поступают в микропроцессор (7), который формирует пакет данных и передает его с помощью узла беспроводной связи (6) через сеть Интернет (8) на удаленный сервер (9), на котором производят запись данных.
Собранные на сервере (9) данные с множества статичных пунктов контроля, установленных в разных местах автотрассы (11), далее обрабатываются посредством выделения однотипных сигналов помех, по которым производят анализ изображений всех автомобилей, проезжавших мимо статических пунктов (1), с последующим определением динамики и направления движения автомобилей (13), в группе которых находится источник радиопомех, возможно, и вычленения конкретного автомобиля путем анализа данных с более одного статистического пункта.
У отобранной группы автомобилей (13) определяют номерные знаки. Определение номера автомобиля можно выполнить, например, посредством системы определения номеров автотранспорта «КОДОС-Авто» [4].
Затем производят сравнение номерных знаков и при обнаружении совпадений номерных знаков тех автомобилей, которые были зафиксированы камерами слежения в момент обнаружения источника радиопомех, сведения об этих номерах автомобилей и динамике их движения передают на посты (10) дорожно-патрульной службы, находящиеся в ближайших зонах от последнего места, где был зафиксирован последний источник радиопомех.
На постах (10) дорожным патрулем производят остановку автомобилей для проверки документов у водителей. При отсутствии техпаспорта автомобиля у водителя он может быть задержан до выяснения обстоятельств как потенциальный угонщик либо, если документы у него в порядке, но в салоне его авто обнаружены «глушилки», его также можно задержать и оштрафовать, поскольку он нарушает законодательство, создавая помехи в системах радиосвязи.
Источники информации
1. http://www.autopulse.ru/item9867.html
2. http://www.bughunter.ru/prod/prod_08.php
3. http://gps-club.ru/gps_think/detail.php?ID=72435
4. http://www.kodos.ru/production/auto/
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс и сигнальное устройство для обнаружения подвижных объектов охраны | 2019 |
|
RU2725571C1 |
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
| РЕГИОНАЛЬНАЯ СИГНАЛЬНАЯ ПРОТИВОУГОННАЯ СИСТЕМА | 2003 |
|
RU2228861C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2320504C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ УГНАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2078701C1 |
| СПОСОБ ПОИСКА И ПЕРЕХВАТА УГНАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2228274C1 |
| СПОСОБ ВЫЯВЛЕНИЯ РАДИОИЗЛУЧЕНИЯ ПРИ ДОСМОТРЕ АВТОМОБИЛЯ | 2021 |
|
RU2765012C1 |
| Способ нахождения угнанного транспортного средства | 2017 |
|
RU2668770C1 |
| СПОСОБ ЗАЩИТЫ АВТОМОБИЛЯ ОТ УГОНА И ПРОТИВОУГОННАЯ СИСТЕМА ДЛЯ АВТОМОБИЛЯ | 1994 |
|
RU2081012C1 |
| СИСТЕМА ОПОЗНАВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2012 |
|
RU2500036C1 |
Пункты контроля размещают на автотрассах и оснащают приемниками для обнаружения источника помех сигналов GPS и GSM. При обнаружении помех производят фото- или видеосъемку находящихся на автотрассе автомобилей и передают данные на удаленный сервер. Полученные на сервере данные с нескольких пунктов контроля обрабатываются на предмет совпадения номерных знаков автомобилей. Передают данные об указанных номерах автомобилей и динамике их движения на посты дорожно-патрульной службы, находящиеся в ближайших зонах от последнего места регистрации радиопомех. Повышается эффективность обнаружения угнанных автомобилей. 2 ил.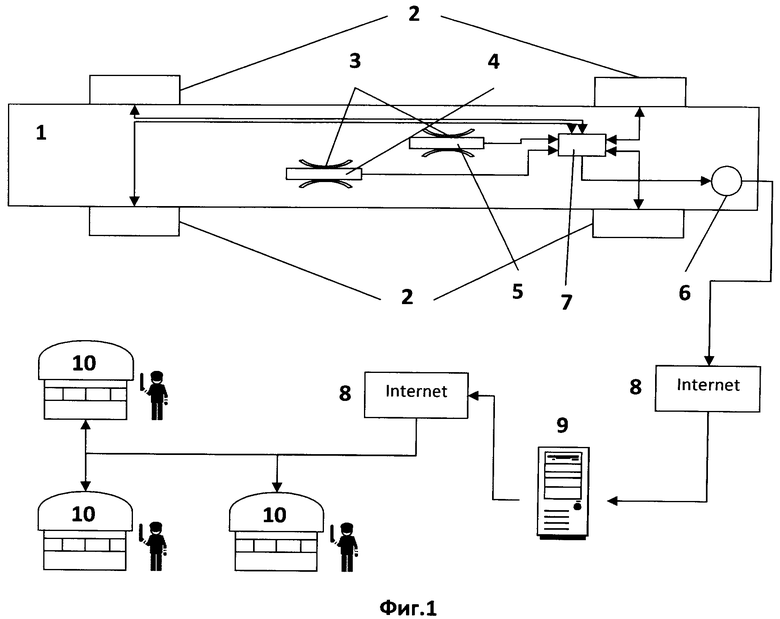
Способ обнаружения угнанных автомобилей по наличию подавителей сигналов, характеризующийся использованием статичных пунктов контроля, размещенных на автотрассах и содержащих приемники для обнаружения источника помех сигналов GPS, функционирующие на основе мониторинга соотношения сигнал-шум подавителя (JNR), отличающийся тем, что рядом с приемником для обнаружения источника помех сигналов GPS устанавливают приемник для обнаружения источника помех сигналов GSM, не менее одной видеокамеры и узел беспроводной связи, а обнаружение радиопомех проводят антеннами с узкой диаграммой направленности, причем при обнаружении источника помех сигналов GPS и/или сигналов GSM с соответствующего приемника подают сигнал тревоги, по которому с рядом установленной видеокамеры делают фото- или видеосъемку автомобилей, находящихся на автотрассе; затем полученные сведения о типе источника помех радиосигналов и полученные изображения передают с помощью узла беспроводной связи на удаленный сервер, на котором производят запись данных; собранные на сервере данные с множества статичных пунктов контроля, установленных в разных местах автотрассы, далее обрабатываются посредством выделения однотипных сигналов помех, по которым производят анализ изображений всех автомобилей, проезжавших мимо статических пунктов, с последующим определением динамики и направления движения автомобилей, в группе которых находится источник радиопомех, их номерных знаков, и далее при обнаружении номерных знаков тех автомобилей, которые были зафиксированы камерами слежения в момент обнаружения источника радиопомех, сведения о номерах автомобилей и динамике их движения передают на посты дорожно-патрульной службы, находящиеся в ближайших зонах от последнего места, где был зафиксирован последний источник радиопомех.
| US 20070200688 A1, 30.08.2007 | |||
| US 8159336 B2, 17.04.2012 | |||
| ITT Exelis announces new capability in GPS interference, detection and geolocation | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
| http://www.exelisinc.com/news/pressreleases/Pages/ITT-Exelis-announces-new-capability-in-GPS-interference,-detection-and-geolocation.aspx | |||

