Изобретение относится к способам радиоэлектронной защиты транспортных средств (ТС) от угонов и краж с использованием территориально распределенных средств наблюдения и сил быстрого реагирования.
Известна американская радиопоисковая система LO/JACK, предназначенная для обнаружения и поиска похищенных или угнанных ТС (УТС), эксплуатируемая в Москве с 1996 г. (см., например, рекламные материалы ЗАО "Мосвнешинформ", Руководство по эксплуатации, Москва, 1998 г.). В состав этой системы входят следующие основные узлы:
- приемоответчик (VLU), скрытно устанавливаемый на автомобиле;
- несколько территориально разнесенных базисных станций, содержащих передатчик включения (VAT), и устанавливаемую на вышке антенну;
- центральную компьютерную станцию (VAC) с базой данных, расположенную в центре быстрого реагирования;
- устанавливаемый на милицейских автомобилях преследования трекер (VTC) - автомобильный компьютерный узел слежения, включающий в себя четырехэлементную пеленгационную антенну с блоками обработки и отображения информации о дальности и пеленге приемоответчика VLU, находящегося на разыскиваемом автомобиле.
При установлении пользователем ТС (владельцем или уполномоченным им лицом) факта кражи или угона ТС он обращается с заявлением (письменно или по телефону) в центр быстрого реагирования системы LO/JACK или в дежурную часть (ДЧ) милиции. Оператор системы активирует установленный на УТС приемоответчик VLU путем посылки ему кодового сообщения с установленной на вышке антенне передатчика включения VAT. Приемоответчик VLU включается и начинает посылать сигнал, по которому можно запеленговать УТС с милицейских автомобилей преследования, оснащенных трекерами VTC. Центральная компьютерная станция VAC связывается с передатчиками включения VAT по телефонным каналам (через модемы).
После того, как какой-либо из трекеров VTC обнаруживает и пеленгует работающий приемоответчик VLU, начинается операция по преследованию и перехвату УТС (операция "Капкан"). В ней участвуют несколько оборудованных трекерами VTC патрульных автомобилей специализированного подразделения милиции. Трекеры VTC пеленгуют источник излучения. Руководствуясь их показаниями и сведениями, получаемыми с помощью штатных радиостанций от других экипажей, патрульные автомобили преследования постепенно стягивают кольцо захвата УТС.
Система LO/JACK может использоваться в комплексе с другими электронными системами защиты автомобиля, например с автомобильной охранной системой REEF NET R-405 (см. Техническую информацию "Автомобильные охранные системы", "Альтоника", М., 2002), серийно выпускаемой предприятием-заявителем. В состав этой системы входят: комплект охранных датчиков, связанный с ними радиопередатчик, электронная метка в виде транспондерной карточки и индивидуальный приемник пользователя ТС.
При попытках несанкционированного проникновения в ТС, кражи его отдельных частей или угона происходит срабатывание соответствующего охранного датчика, включающего радиопередатчик, который начинает излучать через бортовую антенну сигналы тревоги в виде кодированных радиоимпульсов, содержащих информацию об идентификационных признаках автомобиля (кодовые посылки). Находящийся у пользователя индивидуальный приемник принимает эти сигналы и индицирует сигналы тревоги. Пользователь получает возможность предпринять необходимые меры, в частности позвонить в службу "02", обратиться с заявлением в ближайшую ДЧ милиции либо в центр быстрого реагирования системы LO/JACK для активации этой системы и использования милицейских автомобилей, оснащенных трекерами VTC.
Недостатками известного способа поиска и перехвата УТС с использованием вышеуказанных систем являются:
1. Высокая вероятность "ухода" УТС из зоны действия системы, связанная с большим временем реагирования, то есть интервалом между началом несанкционированного использования ТС и началом его поиска с помощью трекеров VTC, поскольку указанный поиск начинается только после регистрации в милиции либо в центре быстрого реагирования системы LO/JACK соответствующего обращения пользователя УТС.
2. Отсутствие начального "целеуказания" в момент начала поиска УТС - определение местоположения УТС - осуществляется непосредственно с патрульных машин милиции в процессе поиска. Это заставляет милицию содержать для указанной цели специализированные подразделения, патрульные машины которых должны нести круглосуточное дежурство, перемещаясь по городу. Это требует значительных эксплуатационных расходов, в то время как основные силы и средства милиции, базирующиеся в ДЧ, практически лишены возможности участвовать в операциях по поиску и перехвату УТС.
3. Необходимость перехвата УТС в движении, что несет угрозу безопасности участникам дорожного движения и создает серьезные трудности правового характера в случае дорожно-транспортного происшествия (ДТП).
На устранение указанных недостатков направлен "Способ определения координат подвижных объектов и устройство для его осуществления" по патенту RU №2106694, G 08 В 25/00, 01.08.1995.
Согласно этому изобретению, излучают с помощью стационарных сигнализаторов, установленных на сооружениях городской инфраструктуры с известными географическими координатами, кодовые посылки, несущие информацию о категории посылки, выраженной тестом, информационным сообщением или сигналом тревоги, и информацию о местоположении указанных сооружений, а с помощью абонентских сигнализаторов, установленных на УТС, излучают кодовые посылки, несущие информацию о категории сообщения, коды идентификационных признаков подвижных и неподвижных объектов и коды принадлежности их соответствующим пользователям ТС, принимают эти кодовые посылки на территориально разнесенных базисных станциях, осуществляют их предварительную обработку и передают в цифровом виде на центральную станцию, где с помощью первичной цифровой обработки определяют категорию принятого сообщения, идентификационные признаки объекта и географические координаты сигнализатора, излучающего данную кодовую посылку, а также расстояния от абонентского сигнализатора до ближайших к нему базисных станций, после чего формируют и передают на базисные станции, стационарные сигнализаторы и абонентские сигнализаторы, установленные на подвижных и неподвижных охраняемых объектах, ответные тестовые сообщения, подтверждающие факт взятия данного объекта под охрану, а в случае несанкционированного воздействия на какой-либо из оборудованных абонентскими сигнализаторами подвижный или неподвижный объект и обнаружения в его кодовой посылке сигнала тревоги передают тревожное оповещение по пейджинговой сети связи на индивидуальный приемник владельца и на приемник абонентского сигнализатора, установленного на принадлежащем этому владельцу подвижном или неподвижном объекте, при этом часть стационарных сигнализаторов используют в качестве базисных станций. В случае несанкционированного воздействия на какое-либо из оборудованных абонентским сигнализатором ТС, сопровождающегося срабатыванием абонентского сигнализатора и излучением вышеуказанных кодовых посылок, содержащих сигнал тревоги, и обнаружения этого сигнала при цифровой обработке на центральной станции, передают тревожное сообщение с центральной станции на индивидуальный приемник пользователя ТС, используя для этого пейджинговую сеть связи. Часть стационарных сигнализаторов может быть использована в качестве базисных станций с возможностью приема и ретрансляции кодовых посылок, излучаемых абонентским сигнализатором с подвижного объекта, и с возможностью измерений дальностей до него со стационарных сигнализаторов и/или базисных станций. При этом абонентский сигнализатор может быть выполнен с возможностью кодированного набора пейджингового сообщения.
Описанное выше техническое решение позволяет существенно сократить время реагирования и локализовать УТС на местности в момент его обнаружения, тем самым существенно упростив и сделав более целенаправленной процедуру дальнейшего его поиска и перехвата силами быстрого реагирования.
Недостаток указанного технического решения состоит в том, что практически реализуемая точность разностно-дальномерного метода определения местоположения подвижного объекта в реальных условиях городской застройки оказывается значительно ниже расчетной. Основной причиной ухудшения точности является влияние переотражений радиосигналов от домов и затенения листвой деревьев. Кроме того, инструментальная точность разностно-дально-мерных измерений принципиально зависит от "геометрического фактора", т.е. от относительных положений УТС и базисных станций. Все это снижает надежность измерений и делает их результаты зависимыми от местоположения УТС относительно сооружений городской инфраструктуры. Вследствие этого увеличивается время поиска УТС силами быстрого реагирования - пешими нарядами и патрульными машинами милиции, а в некоторых зонах перехват УТС становится практически невозможным.
Другими недостатками указанного технического решения являются высокая вероятность ложной тревоги, которая может быть вызвана включением абонентского сигнализатора в случаях, не связанных с несанкционированным воздействием на ТС, в том числе спровоцированных самими угонщиками, а также необходимость перехвата УТС в движении, что может привести к ДТП.
Для устранения указанных недостатков в способе по патенту RU №2159190, В 60 R 25/00, 20.11.2000, выбранном в качестве прототипа настоящего изобретения, излучают с помощью стационарных сигнализаторов, установленных на сооружениях городской инфраструктуры с известными географическими координатами, кодовые посылки, несущие информацию о категории посылки, выраженной тестом, информационным сообщением или сигналом тревоги, и информацию о местоположении указанных сооружений, а с помощью абонентских сигнализаторов, установленных на подвижных или неподвижных охраняемых объектах, излучают кодовые посылки, несущие информацию о категории сообщения, коды идентификационных признаков подвижных и неподвижных объектов и коды принадлежности их соответствующим владельцам, принимают эти кодовые посылки на территориально разнесенных базисных станциях, осуществляют их предварительную обработку и передают в цифровом виде на центральную станцию, где с помощью первичной цифровой обработки определяют категорию принятого сообщения, идентификационные признаки объекта и географические координаты сигнализатора, излучающего данную кодовую посылку, а также расстояния от абонентского сигнализатора до ближайших к нему базисных станций, после чего формируют и передают на базисные станции, стационарные сигнализаторы и абонентские сигнализаторы, установленные на подвижных и неподвижных охраняемых объектах, ответные тестовые сообщения, подтверждающие факт взятия данного объекта под охрану, а в случае несанкционированного воздействия на какой-либо из оборудованных абонентскими сигнализаторами подвижный или неподвижный объект и обнаружения в его кодовой посылке сигнала тревоги передают тревожное оповещение по пейджинговой сети связи на индивидуальный приемник владельца и на приемник абонентского сигнализатора, установленного на принадлежащем этому владельцу подвижном или неподвижном объекте, при этом часть стационарных сигнализаторов используют в качестве базисных станций, - при охране подвижных объектов одновременно с измерениями расстояний между абонентским сигнализатором и ближайшими к нему стационарными сигнализаторами или базисными станциями пеленгуют подвижный объект ближайшими к нему стационарными сигнализаторами или базисными станциями и определяют его полярные координаты относительно этих стационарных сигнализаторов или базисных станций, на центральной станции осуществляют дополнительную цифровую обработку первично обработанных кодовых посылок с использованием условно постоянной информации о местности, о расположении на ней различных городских сооружений и о транспортных потоках на улично-дорожной сети, получаемой от внешних информационных источников, определяют местоположение подвижного объекта на местности при дополнительной цифровой обработке в центральной станции по совокупности данных о географических координатах ближайших к нему стационарных сигнализаторов или базисных станций и значений полярных координат подвижного объекта относительно этих стационарных сигнализаторов или базисных станций, одновременно с передачей тревожного оповещения владельцу подвижного объекта, абонентский сигнализатор которого передал сигнал тревоги, активируют по пейджинговой сети связи установленный на этом объекте иммобилайзер и блокируют с его помощью движение подвижного объекта, а после получения от его владельца подтверждения факта несанкционированного воздействия на принадлежащий ему подвижный объект формируют на центральной станции и передают по проводным или беспроводным каналам связи в ближайший к данному объекту центр оперативного реагирования голосовое сообщение и цифровые данные, несущие информацию о категории сигнала тревоги, идентификационных признаках объекта, местоположении данного объекта на местности и сведения о владельце, а в процессе реагирования на факт несанкционированного воздействия определяют с помощью носимых или возимых пеленгационных устройств, размещенных на подвижных средствах оперативного реагирования, полярные координаты данного объекта относительно носимых или возимых пеленгационных устройств и с их помощью уточняют ранее переданные с центральной станции данные о местоположении объекта на местности, при этом владельца охраняемого подвижного объекта снабжают одной или несколькими транспондерными карточками, на поверхности которых нанесены защищенные специальным покрытием одноразового применения, например, краской секретные коды, становящиеся визуально доступными только при стирании защитного покрытия с соответствующих полей транспондерной карточки, а в цифровой памяти транспондерной карточки зафиксирован идентификационный код владельца, считывают идентификационный код с помощью установленного на подвижном объекте узла управления иммобилайзером при внесении транспондерной карточки в специальную зону для дистанционного считывания, сравнивают считанный код с каждым идентификационным кодом, хранящимся в том же узле управления иммобилайзером, и при их совпадении деактивируют иммобилайзер с последующим разблокированием движения подвижного объекта.
Недостаток способа-прототипа заключается в том, что начальная стадия операции по поиску и перехвату УТС пешими нарядами и экипажами патрульных машин милиции (до момента радиозахвата УТС носимым или возимым радиопеленгаторами и начала операции "Капкан") осуществляется, как и в системе LO/JACK, вслепую. И хотя размер зоны поиска значительно сокращен, продолжительность и конечный результат операции во многом зависит от конкретной ситуации (относительного местоположения УТС и сил быстрого реагирования в начале поиска, характера городской застройки и т.п.), а также от характера поведения в этой ситуации самих угонщиков.
Задачей настоящего изобретения является уменьшение указанной зависимости, сокращение длительности операции и повышение вероятности успешного перехвата УТС силами быстрого реагирования.
Для решения поставленной задачи в известном способе комплексной охраны подвижных и неподвижных объектов, при котором излучают с борта УТС тревожные сообщения, содержащие идентификационные признаки УТС и пользователей - владельца УТС и/или уполномоченных им лиц, принимают указанные тревожные сообщения стационарными радиопеленгационными станциями, установленными на сооружениях городской инфраструктуры с известными географическими координатами, измеряют координаты УТС относительно стационарных радиопеленгационных станций, принявших указанные тревожные сообщения, формируют на каждой из стационарных радиопеленгационных станций кодовые посылки, содержащие измеренные относительные координаты УТС и географические координаты сооружения, на котором расположена данная стационарная радиопеленгационная станция, передают указанные кодовые посылки в центр обработки информации, в котором с помощью первичной обработки принятых кодовых посылок селектируют идентификационные признаки УТС и пользователей и измеренные относительные координаты УТС, с помощью вторичной обработки первично обработанных кодовых посылок определяют местоположение УТС в системе координат, связанной с центром обработки информации, используя при этом географические координаты стационарных радиопеленгационных станций, принявших тревожные сообщения от УТС, измеренные координаты УТС относительно указанных стационарных радиопеленгационных станций и условно постоянную информацию о городской инфраструктуре и транспортных потоках на улично-дорожной сети, полученную из внешних информационных источников, передают тревожные оповещения пользователям УТС и после получения от одного из них голосового подтверждения факта угона блокируют с помощью специального кода, передаваемого по пейджинговой или сотовой сети подвижной связи, движение УТС, формируют и передают по выделенным проводным или беспроводным каналам связи в ближайшие к УТС центры быстрого реагирования тревожные информационные сообщения, содержащие голосовое уведомление об угоне и кодированную информацию об идентификационных признаках УТС и его пользователей и о местоположении УТС относительно указанных центров быстрого реагирования, а в процессе поиска и перехвата УТС находящимися в распоряжении данного центра быстрого реагирования пешими нарядами и экипажами патрульных машин осуществляют пеленгацию УТС носимыми или возимыми радиопеленгационными устройствами, в центрах быстрого реагирования, участвующих в операциях по поиску и перехвату УТС осуществляют видеонаблюдение прилегающих к указанному центру быстрого реагирования участков местности с помощью поднятого в воздух на беспилотном носителе комплекса воздушного наблюдения, содержащего управляемые видео-и инфракрасную камеры, осуществляют передачу полученной с помощью этих камер видеоинформации в центр быстрого реагирования, отображают переданную видеоинформацию в виде растровых изображений на автоматизированных рабочих местах операторов и администратора, а после приема голосового уведомления об угоне обнаруживают и идентифицируют на указанных растровых изображениях угнанное транспортное средство, определяют его текущее местонахождение относительно элементов городской инфраструктуры с известными географическими координатами и передают полученную операторами информацию об идентификационных признаках и местоположении угнанного транспортного средства совместно с информацией о городской инфраструктуре и транспортных потоках на улично-дорожной сети в зоне ответственности данного центра быстрого реагирования с автоматизированного рабочего места администратора пешим нарядам и экипажам патрульных машин, осуществляющим поиск и перехват угнанного транспортного средства.
Решению поставленной задачи способствуют следующие частные существенные признаки.
Комплекс воздушного наблюдения устанавливают на аэродинамическом дистанционно-пилотируемом летательном аппарате, а видеонаблюдение участков местности, прилегающих к центру быстрого реагирования, осуществляют в режиме барражирования дистанционно-пилотируемого летательного аппарата над указанными участками местности.
Комплекс воздушного наблюдения устанавливают на радиоуправляемом вертолете, а видеонаблюдение участков местности, прилегающих к центру быстрого реагирования, осуществляют в режиме зависания радиоуправляемого вертолета над указанными участками местности.
Комплекс воздушного наблюдения устанавливают на дистанционно-управляемом дирижабле или аэростате, а видеонаблюдение участков местности, прилегающих к центру быстрого реагирования, осуществляют в режиме зависания дистанционно-управляемого дирижабля или аэростата над указанными участками местности, при этом передачу видеоинформации осуществляют по радиоэфиру или оптоволоконной линии связи.
Комплекс воздушного наблюдения устанавливают на привязном носителе - аэростате или геостате, который удерживают над центром быстрого реагирования с помощью троса, а передачу видеоинформации осуществляют по радиоэфиру или проводной, например, оптоволоконной линии связи, проложенной вдоль указанного троса.
Сущность изобретения поясняется с помощью структурных схем, показанных на фиг.1-3.
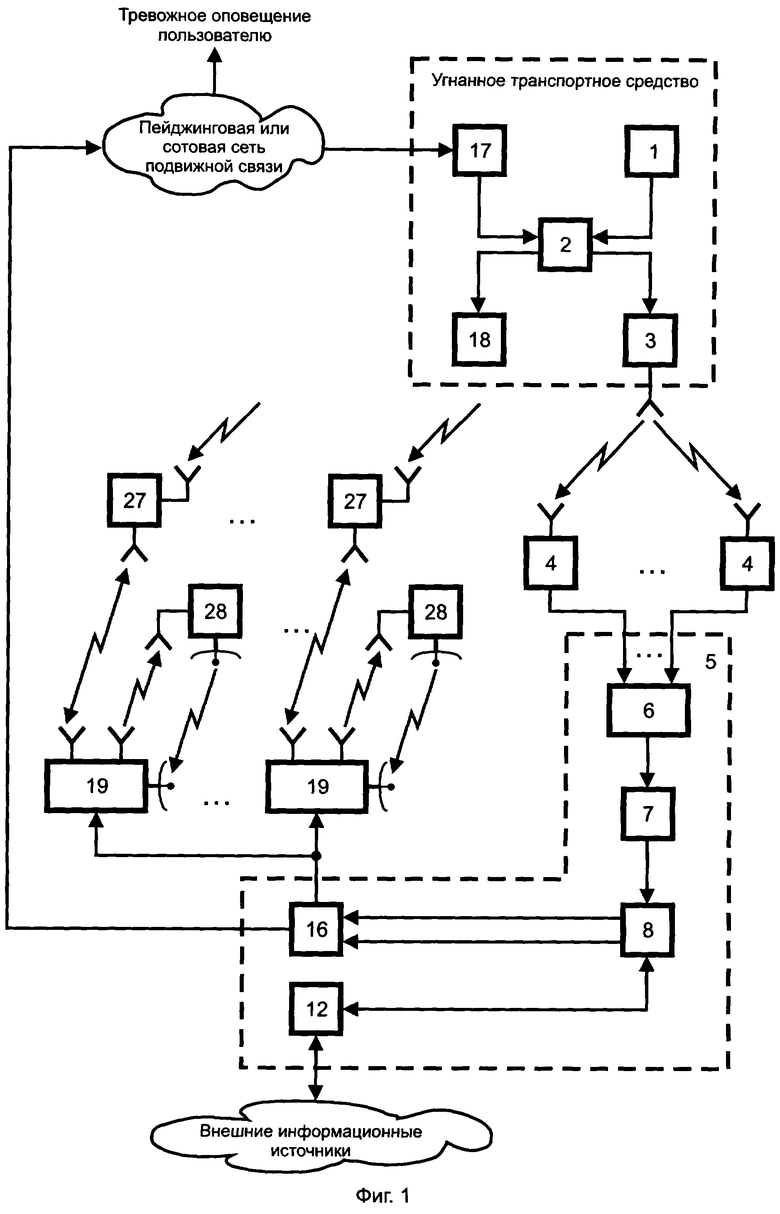
На фиг.1 представлена структурная схема построения комплексной автоматизированной системы управления, реализующей заявляемый способ поиска и перехвата УТС.
На фиг.2 показана структурная схема одного из возможных вариантов построения блока вторичной обработки информации.
На фиг.3 представлена структурная схема одного из возможных вариантов построения центра быстрого реагирования и связанного с ним комплекса воздушного наблюдения.
На фиг.1-3 использованы следующие обозначения: 1 - датчики несанкционированного воздействия; 2 - центральный блок управления охранной системой; 3 - блок передачи тревожных сообщений; 4 - стационарная радиопеленгационная станция; 5 - центр обработки информации; 6 - блок приема кодовых сообщений; 7 - блок первичной обработки информации; 8 - блок вторичной обработки информации; 9 - ГИС-процессор; 10 - цифровая память; 11 - блок расчета координат; 12 - блок приема информации из внешних информационных источников; 13 - блок отображения картографической и семантической информации; 14 - блок хранения номеров телефонов и пейджеров пользователей ТС; 15 - блок хранения звуковых сигналов, мелодий и речевых сообщений; 16 - блок передачи информационных сообщений; 17 - абонентский приемник; 18 - блоки управления функциональными органами ТС; 19 - центр быстрого реагирования; 20 - блок приема информационных сообщений; 21 - сервер тревожных информационных сообщений; 22 - автоматизированное рабочее место (АРМ) оператора; 23 - АРМ администратора; 24 - сервер условно постоянной информации о городской инфраструктуре; 25 - блок обработки видеоинформации; 26 - блок приема видеоинформации; 27 - носимые или возимые радиопеленгационные станции; 28 - комплекс воздушного наблюдения; 29 - бортовой компьютер; 30 - блок управления видеокамерой; 31 - блок управления инфракрасной камерой (ИК-камерой); 32 - блок передачи видеоинформации; 33 - органы управления беспилотным носителем; 34 – инерциальная система; 35 - высотомер.
В состав рассматриваемого варианта реализации заявленного технического решения входит аппаратура, установленная на УТС, оборудование центра 5 обработки информации, оборудование центров 19 быстрого реагирования и связанных с ними сил быстрого реагирования - пеших нарядов и экипажей патрульных машин, оснащенных носимыми или возимыми радиопеленгационными станциями 27, и комплексов 28 воздушного наблюдения, устанавливаемых на беспилотных носителях, а также сеть стационарных ретрансляционных станций 4, установленных на сооружениях городской инфраструктуры с известными географическими координатами.
На УТС установлены типовые блоки охранной системы (системы защиты) ТС: датчики 1 несанкционированного воздействия, центральный блок 2 управления охранной системой, блок 3 передачи тревожных сообщений, абонентский приемник 17 и блоки 18 управления функциональными органами ТС, обеспечивающие возможность блокирования движения УТС. Все указанные блоки являются штатными составными частями охранных и противоугонных систем, серийно выпускаемых предприятием-заявителем (см., например, "Каталог 2002. Автомобильные охранные системы", "Альтоника", 2002). Другие блоки охранной системы, обычно входящие в состав штатной аппаратуры (звуковой и световой сигнализации, дистанционной идентификации пользователя и др.), на фиг.1 не показаны, поскольку их роль в рассматриваемом техническом решении несущественна.
Входы центрального блока 2 управления охранной системой подключены соответственно к выходам датчиков 1 несанкционированного воздействия и к выходу абонентского приемника 17, который служит терминалом пейджинговой и/или сотовой подвижной сети связи, а выходы - к блоку 3 передачи тревожных сообщений и к блокам управления 18 функциональными органами ТС, обеспечивающим принудительный останов УТС при подаче на абонентский приемник 17 специального кода блокирования движения.
Блок 3 передачи тревожных сообщений связан по радиоэфиру со стационарными радиопеленгационными станциями 4, установленными на сооружениях городской инфраструктуры с известными географическими координатами и выполненными с возможностью приема тревожных сообщений от УТС, измерения полярных координат (дальностей и пеленгов) УТС относительно указанных стационарных радиопеленгационных станций 4 и передачи кодовых посылок в центр 5 обработки информации. Платформой для установки стационарной радиопеленгационной станции 4 могут служить элементы улично-дорожной инфраструктуры, например фонарные столбы, светофоры, крыши здания, объекты недвижимого имущества владельца ТС, например окно его квартиры, крыша гаража или коттеджа и пр.
Роль стационарных радиопеленгационных станций 4 могут выполнять, в частности, серийно выпускаемые предприятием-заявителем изделия REEF STRING модель PS-01 системы "CARNET-1" (сертификат соответствия №РОСС RU.ME30.B.00945).
Центр 5 обработки информации включает в себя последовательно соединенные блок 6 приема кодовых сообщений, выполненный с возможностью приема кодовых посылок, передаваемых стационарными радиопеленгационными станциями 4, блоки 7 первичной и 8 вторичной обработки информации и блок 16 передачи информационных сообщений, подключенный с помощью выделенных проводных или беспроводных каналов связи к центрам 19 быстрого реагирования, и имеющий выход в сети пейджинговой и сотовой подвижной связи. В состав центра 5 обработки информации входит также блок 12 приема информации из внешних информационных источников, связанный с блоком 8 вторичной обработки информации.
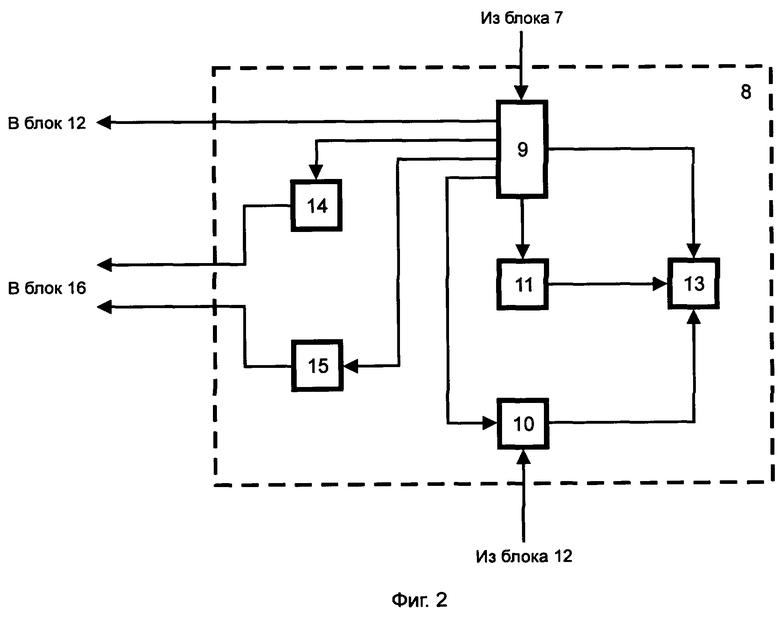
Блок 8 вторичной обработки информации (см. фиг.2) содержит ГИС-процессор 9 и связанный с ним блок 11 расчета координат, выход которого подключен к первому входу блока 13 отображения картографической и семантической информации, второй вход блока 13 отображения картографической и семантической информации подключен к ГИС-процессору 9, а третий вход - к цифровой памяти 10, связанной с блоком 12 приема информации из внешних информационных источников, а также блок 14 хранения номеров телефонов и пейджеров пользователей и блок 15 хранения звуковых сигналов, мелодий и речевых сообщений, входы которых подключены к ГИС-процессору 9, а выходы - ко входам блока 16 передачи информационных сообщений.
ГИС-процессор 9, цифровая память 10, блок 11 расчета координат и блок 13 отображения картографической и семантической информации являются составными частями типового аппаратно-программного комплекса, реализующего ГИС-технологию, то есть:
- возможность работы с информацией, создаваемой и поддерживаемой в различных программных средах в режиме реального времени (без предварительной конвертации);
- возможность работы (просмотр и редактирование) с распределенной пространственной информацией удаленных пользователей и с различными уровнями доступа, посредством многозвенной архитектуры клиент - сервер;
- возможность организации работы в локальной сети серверов;
- внешний программный интерфейс, дающий пользователю полный контроль над данными, позволяющий решать широкий спектр задач от организации связи с внешними базами данных до импорта-экспорта и пространственного анализа данных;
- быструю и удобную работу со сверхбольшими объемами растровой графики;
- тесную интеграцию цифровой математической модели местности, картографических и семантических данных;
- возможности подготовки и печати выходных документов в соответствии с требованиями государственных стандартов.
В наибольшей степени этим требованиям удовлетворяет аппаратно-программный комплекс "GeoBuilder", серийно выпускаемый компанией ПК "Геокибернетика" (сертификат соответствия №РОСС RU.KP 02.C00014).Работа аппаратно-программного комплекса "GeoBuilder" основана на создании, ведении и поддержании пространственного банка данных, составными частями которого являются векторная, семантическая и растровая базы данных, а также цифровая модель местности.
Векторная база данных представляет собой хранилище координатного описания объектов, подключенное через специализированный драйвер к соответствующему источнику этой информации.
Семантическая база данных является хранилищем атрибутивного описания объектов (семантические таблицы и классификаторы, связанные с одним или несколькими векторными слоями одной или нескольких векторных баз данных).
Растровая база данных представляет собой набор растровых файлов, логически объединенных в слои, подключенные через специализированные драйверы данного графического формата.
Цифровая модель местности - это единое структурированное математическое описание и связанная с ним графическая интерпретация.
Аппаратно-программный комплекс "GeoBuilder" обеспечивает:
- интеграцию в едином программном комплексе функций различных технологических уровней, обеспечивающих как создание цифровых карт масштаба 1:500 и мельче с полным топографическим соответствием требованиям государственных стандартов, так и комплексное использование растровой, векторной, семантической и математической информации;
- доступ ко всем типам данных через систему независимых драйверов, обеспечивающий развязку графического ядра и пользовательского интерфейса с системой хранения и управления данными с возможностью использования разнообразных форматов хранения данных (СУБД, CAD - файлы, специализированные хранилища и т.д.);
- масштабируемость технологических решений от уровня APM’a (шифрования, геопривязки растровой графики, мониторинга и т.д.) до многопользовательских корпоративных ГИС;
- мозаичную и пирамидальную структуры представления растровой информации, например видео- и ИК-изображений;
- интеграцию цифровой математической модели местности, картографических, графических (растровых) и семантических данных для их совместного представления оператору APM’a.
В зависимости от характера и объема информации, поступающей из внешних информационных источников, возможности комплекса "GeoBuilder" могут использоваться полностью или частично.
Блок 14 хранения номеров телефонов и пейджеров пользователей и блок 15 хранения звуковых сигналов, мелодий и речевых сообщений представляют собой микропроцессорные блоки, предназначенные для формирования и отправки по каналам сетей пейджинговой и/или сотовой подвижной связи адресных голосовых и текстовых сообщений, а также кодовых посылок для блокирования двигателя УТС. Указанные задачи решают серийно выпускаемые предприятием-заявителем одноименные блоки, входящие в состав автомобильного комплекта громкой связи REEF HE-1000 (сертификат соответствия №РОСС. RU.ME30.B.01281).
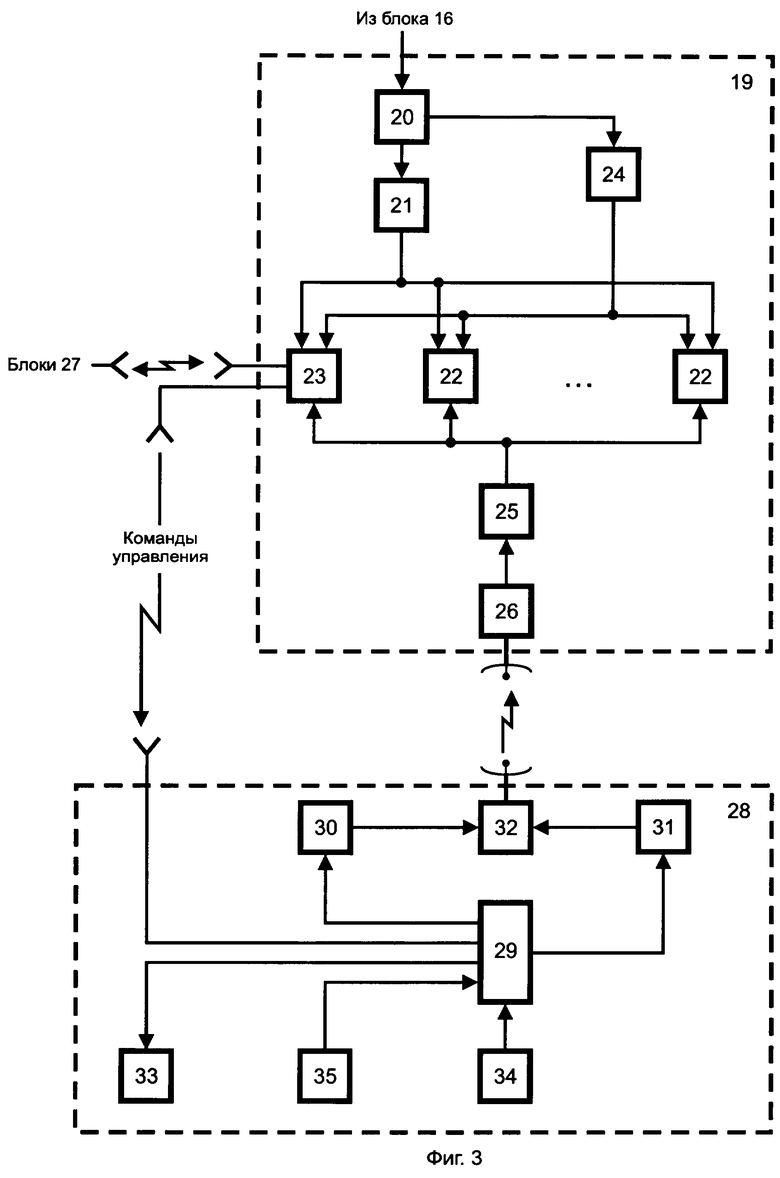
Центр 19 быстрого реагирования (см. фиг.3) включает в себя локальную сеть АРМ: АРМ’ы 22 оператора и АРМ 23 администратора, связанный:
- радиосвязью с силами быстрого реагирования: пешими нарядами и экипажами патрульных машин, оснащенными соответственно носимыми или возимыми радиопеленгационными станциями 27, предназначенными для определения относительных полярных координат УТС;
- посредством канала радиоуправления - с комплексами воздушного наблюдения 28, установленными на беспилотных носителях.
В качестве центров 19 быстрого реагирования могут, например, использоваться ДЧ органов внутренних дел, вневедомственной охраны и/или частных охранных предприятий, распределенных по территории города (региона). Размеры зоны ответственности каждой ДЧ определяются допустимым временем реагирования, то есть интервалом времени между моментом срабатывания блока 3 передачи тревожных сообщений и моментом прибытия пешего наряда или патрульной машины в зону действия стационарной радиопеленгационной станции 4, принявшей указанное тревожное сообщение.
В состав каждого центра 19 быстрого реагирования, помимо локальной сети, состоящей из APM’ов 22 операторов и APM’a 23 администратора, входят также: последовательно соединенные блок 20 приема информационных сообщений, вход которого соединен выделенным проводным или беспроводным каналом связи с выходом блока 16 передачи информационных сообщений, и сервер 21 тревожных информационных сообщений, связанный с APM’ами 22 операторов и с APM’ом 23 администратора, сервер 24 условно постоянной информации о городской инфраструктуре, вход которого подключен ко второму выхода блока 20 приема информационных сообщений, а выход - к АРМ’ам 22 операторов и APM’y 23 администратора, подключенного с помощью радиолинии или оптоволоконного канала связи к бортовому компьютеру 29, последовательно соединенные блок 26 приема видеоинформации, подключенный с помощью линии передачи видеоинформации к комплексу 28 воздушного наблюдения, и блок 25 обработки видеоинформации, выход которого подключен к вышеупомянутым АРМ’ам 22 и 23.
Типовой комплекс воздушного наблюдения 28 (см. фиг.3) содержит бортовой компьютер 29, выходы которого подключены к блоку 30 управления видеокамерой и к блоку 31 управления ИК-камерой, блок 32 передачи видеоинформации, входы которого подключены к выходам блока 30 управления видеокамерой и блока 31 управления ИК-камерой, выход блока 32 передачи видеоинформации соединен посредством радиолинии передачи видеоинформации с входом блока 26 приема видеоинформации, расположенного в центре 19 быстрого реагирования, контролирующем данный комплекс 28 воздушного наблюдения.
В состав комплекса 28 воздушного наблюдения входит также аппаратура, обеспечивающая стабильность условий видеосъемки с борта беспилотного носителя: органы 33 управления беспилотным носителем, подключенные к бортовому компьютеру 29, и подключенные к соответствующим входам бортового компьютера 29 инерциальная система 34 и высотомер 35.
Состав и параметры указанной аппаратуры зависят от типа используемого беспилотного носителя.
Так, в случае применения аэродинамического дистанционно-пилотируемого летательного аппарата (самолета, вертолета дирижабля или аэростата) для обеспечения стабильных условий видеосъемки необходимо использование всей показанной на фиг.3 аппаратуры.
Инерциальная система 34 предназначена для задания и стабилизации положения блоков 30 управления видеокамерой и 31 управления ИК-камерой в трехмерном пространстве. Высотомер 35 предназначен для измерения высоты полета носителя, которая необходима при расчете в бортовом компьютере 29 геометрических условий видеонаблюдения.
При использовании в качестве беспилотного носителя комплекса 28 воздушного наблюдения привязной платформы - аэростата или надувной конструкции (геостата) - органы 33 управления беспилотным носителем могут быть упрощены либо вообще не применяться, а связь бортового компьютера 29 с APM’ом 23 администратора отсутствовать либо осуществляться по проводному (оптоволоконному) каналу связи.
С другой стороны, на более сложном аэродинамическом беспилотном носителе, например на беспилотном самолете, наряду с указанными на фиг.3 блоками могут быть использованы и другие бортовые средства контроля полета и управления наблюдением, например магнитный компас, GPS-приемник и др. (см., например, US №4818990, G 08 C 9/06, G 08 C 19/22, 04.04.1989). С точки зрения поставленной задачи такие различия в составе бортовой аппаратуры управления беспилотным носителем несущественны, а отличия, касающиеся типа применяемого беспилотного носителя, сформулированы в виде зависимых существенных признаков изобретения.
Представленный на фиг.1-3 вариант построения комплексной автоматизированной системы управления, реализующей заявленный способ поиска и перехвата УТС, работает следующим образом.
При несанкционированном воздействии на ТС, пользователь которого является абонентом рассматриваемой комплексной автоматизированной системы управления, срабатывают установленные в ТС датчики 1 несанкционированного воздействия (герконы, детекторы разбития стекла, датчики удара и пр.), и соответствующие сигналы тревоги передаются в центральный блок 2 управления охранной системой. Центральный блок 2 управления охранной системой активирует блок 3 передачи тревожных сообщений. Последний излучает тревожные сообщения, содержащие идентификационные признаки УТС (марка, цвет, государственный номер и т.п.) и пользователей этого ТС (фамилия, имя, отчество, место работы, домашний адрес и т.п.).
Стационарные радиопеленгационные станции 4, установленные на сооружениях городской инфраструктуры с известными географическими координатами, принимают эти тревожные сообщения и методом амплитудной пеленгации измеряют полярные координаты источника излучения: дальность и угол направления (пеленг) относительно стационарной радиопеленгационной станции 4, принявшей тревожное сообщение. Далее формируется кодовая посылка, содержащая коды идентификационных признаков УТС и пользователей, измеренные координаты УТС относительно стационарных радиопеленгационных станций 4, принявших тревожные сообщения, и географические координаты сооружений, на которых установлены эти стационарные радиопеленгационные станции. Указанные кодовые посылки передаются по радиоэфиру и/или проводным каналам связи, например, по оптоволокну, в центр 5 обработки информации - на вход блока 6 приема кодовых сообщений, с выхода которого принятые кодовые посылки поступают в блок 7 первичной обработки информации. В указанном блоке осуществляется селекция кодов идентификационных признаков УТС и пользователей, кодов измеренных координат УТС относительно стационарных радиопеленгационных станций 4, принявших тревожные сообщения, и кодов географических координат сооружений, на которых установлены эти стационарные радиопеленгационные станции 4.
Из блока 7 первичной обработки информации указанная кодовая информация поступает в блок 8 вторичной обработки информации - на вход ГИС-процессора 9 (см. фиг.2). ГИС-процессор 9 запрашивает из цифровой памяти 10 фрагмент специализированной картографической основы того района, в пределах которого находятся стационарные радиопеленгационные станции 4, принявшие тревожные сообщения от УТС. Одновременно содержащаяся в кодовой посылке координатная информация передается на вход блока 11 расчета координат. В алгоритмах определения координат УТС используется совокупность данных о географических координатах стационарных радиопеленгационных станций 4, принявших тревожные сообщения от УТС, об измеренных значениях полярных координат УТС относительно указанных радиопеленгационных станций 4. Кроме того, используется условно постоянная информация о городской инфраструктуре, поступающая в цифровую память 10 из блока 12 приема информации из внешних информационных источников. Как правило, входная информация, используемая для расчетов местоположения УТС, обладает избыточностью и может быть обработана с помощью известных алгоритмов координатометрии, применяемых в геодезии и картографии (см., например, Справочник геодезиста, кн. 2, М., Недра, 1985 г.), в том числе с использованием цифровой модели местности (см., например, патент US №2002/0193944, G 01 C 21/26, 19.12.2002).
Предполагаемое местоположение УТС отображается в блоке 13 отображения картографической и семантической информации на фрагменте электронной карты, вызванной из цифровой памяти 10, в виде замкнутой геометрической фигуры, например окружности (микросоты), с центром, находящимся в точке нахождения стационарной радиопеленгационной станции 4, принявшей тревожное сообщение от УТС, и с радиусом, соответствующим дальности приема этой стационарной радиопеленгационной станции 4. Если тревожное сообщение принято одновременно несколькими стационарными радиопеленгационными станциями 4, то зона предполагаемого местонахождения УТС представляет собой геометрическую фигуру, образуемую в результате пересечения нескольких вышеупомянутых окружностей, а местоположение УТС может быть определено методом триангуляции (по трем пеленгам) и/или трилатерации (по трем дальностям).
Результаты пеленгации УТС с близлежащих к нему стационарных радио-пеленгационных станций 4 отображаются в виде секторов с вершинами в точках нахождения указанных стационарных радиопеленгационных станций 4 с известными географическими координатами.
Требуемый фрагмент специализированной цифровой картографической основы запрашивается ГИС-процессором 9 через блок 12 приема информации из внешних информационных источников и скачивается с сервера соответствующего внешнего источника информации в цифровую память 10 блока 8 вторичной обработки информации через блок 12 приема информации из внешних информационных источников. Организация доступа к внешним источникам информации обеспечивается через открытый интерфейс с набором драйверов, позволяющих работать с различными внешними источниками информации. Это позволяет интегрировать в единой среде информацию из различных внешних источников, например клиент-серверные СУБД, файл-серверные СУБД, CAD-файлы, растровые массивы. Одним из внешних источников данных может быть TCP/IP соединение через INTRANET/INTERNET.
Окончательное определение координат УТС осуществляется оператором на экране монитора в блоке 13 отображения картографической и семантической информации, например путем подведения курсора к точке наиболее вероятного нахождения отметки УТС в пределах определенной в блоке 11 расчета координат алгоритмическим путем (см. выше) зоны неопределенности.
Если двигатель УТС не заблокирован, то текущее местоположение УТС отслеживается в блоке 8 вторичной обработки информации с использованием известных алгоритмов автосопровождения подвижных объектов, например калмановской фильтрации (см., например, US №2002/0193944, G 01 С 21/26, 19.12.2002). Точность и устойчивость автосопровождения УТС увеличивается при учете в алгоритмах вторичной обработки графа улично-дорожной сети и другой условно-постоянной информации, хранящейся в цифровой памяти 10 блока 8 вторичной обработки информации.
Траектория перемещения УТС на местности фиксируется в цифровой памяти 10 блока 8 вторичной обработки информации и, при необходимости, может быть вызвана на экран монитора блока 13 отображения картографической и семантической информации для представления оператору.
В результате точность начального "целеуказания" местоположения УТС на местности оказывается достаточной для локализации местонахождения УТС и перехода к целенаправленному поиску УТС пешими нарядами и экипажами патрульных машин сил быстрого реагирования.
Однако этот переход происходит лишь после подтверждения хотя бы одним пользователем факта угона ТС. Для этого после приема первично обработанной кодовой посылки из блока 7 первичной обработки информации ГИС-процессор 9 передает на вход блока 14 хранения номеров телефонов и пейджеров пользователей ТС код идентификационных признаков УТС. По этому коду последовательно определяются номера телефонов и пейджеров пользователей данного ТС. Приоритет отдается владельцу ТС. Одновременно в блоке 15 хранения звуковых сигналов, мелодий и речевых сообщений выбирается речевое сообщение для тревожного оповещения пользователей данного ТС. Указанная информация передается в блок 16 передачи информационных сообщений, который через пейджинговую или сотовую сеть подвижной связи посылает пользователям ТС тревожное оповещение, содержащее номер контактного телефона дежурного оператора центра 5 обработки информации.
После передачи тревожного оповещения пользователям дежурный оператор центра 5 обработки информации некоторое время ожидает ответной реакции от пользователей, ведя сопровождение УТС, и, получив хотя бы от одного из них подтверждение факта угона данного ТС, посылает по пейджинговой или сотовой сетям подвижной связи специальный сигнал, содержащий код блокирования движения УТС. Код блокирования двигателя УТС может передать и сам пользователь ТС, имеющий доступ к пейджинговой или сотовой сетям подвижной связи. Указанный код принимается на борту УТС абонентским приемником 17 и передается в центральный блок 2 управления охранной системой, который формирует соответствующие управляющие воздействия на блоки 18 управления функциональными органами ТС (например, на иммобилайзер), обеспечивающие блокирование движения УТС в безопасном с точки зрения возможности ДТП режиме.
Используя данные, хранящиеся в цифровой памяти 10 блока 8 вторичной обработки информации, дежурный оператор центра 5 обработки информации находит адреса и номера телефонов центров 19 быстрого реагирования, расположенных в районе предполагаемого нахождения УТС. Это - ближайшие к УТС ДЧ милиции, пульты централизованного наблюдения вневедомственной охраны и/или ДЧ охранных предприятий. В блоке 14 хранения номеров телефонов и пейджеров пользователей и в блоке 15 хранения звуковых сигналов, мелодий и речевых сообщений формируются соответствующие тревожные информационные сообщения, содержащие, в частности, голосовое уведомление об угоне и кодированную информацию об идентификационных признаках разыскиваемого УТС. Голосовое сообщение, поступающее из блока 15 хранения звуковых сигналов, мелодий и речевых сообщений, эквивалентно заявлению владельца.
В соответствии с действующим законодательством, по указанному заявлению правоохранительные органы обязаны предпринять незамедлительные меры по пресечению противоправных действий и обеспечению безопасности граждан и их имущества. В центре 19 быстрого реагирования указанные тревожные информационные сообщения через блок 20 приема информационных сообщений поступают на сервер 21 тревожных информационных сообщений, связанный с APM’ами операторов 22 и с APM’ом 23 администратора. Одновременно голосовое сообщение регистрируется в журнале администратора или записывается на магнитный носитель, после чего приобретает юридическую силу официального заявления. АРМ’ы 22 операторов и АРМ 23 администратора связаны с сервером 24 условно-постоянной информации о городской инфраструктуре и через блок 25 приема видеоинформации подключены к выходу блока 26 приема видеоинформации с борта беспилотного носителя комплекса воздушного наблюдения. Сервер 21 тревожных информационных сообщений распределяет принятые тревожные информационные сообщения по АРМ’ам 22 операторов, в соответствии с зонами их ответственности, и передает в сервер 24 условно постоянной информации о городской инфраструктуре соответствующие фрагменты цифровой картографической основы. В APM’e 22 оператора, на который поступило данное тревожное информационное сообщение, содержащаяся в нем кодовая информация отображается на мониторе, в соответствии с ГИС-технологией, применяемой в блоке 8 вторичной обработки информации, например GeoBuilder (см. выше). Необходимые для этого фрагменты специализированной цифровой картографической основы поступают с сервера 24 условно-постоянной информации о городской инфраструктуре.
Каждому центру 19 быстрого реагирования приданы силы быстрого реагирования - пешие наряды и экипажи патрульных машин, оснащенные соответственно носимыми или возимыми радиопеленгационными станциями 27. После обнаружения УТС, например, с помощью установленной на борту патрульной машины возимой радиопеленгационной станции 27 начинается процесс сближения патрульной машины с объектом поиска, при котором точность определения его местоположения возрастает независимо от инструментальной точности первичных измерений местоположения объекта - "первичного целе-указания". Благодаря этому время перехвата уменьшается и вероятность успеха всей операции возрастает.
Специфической особенностью рассматриваемого технического решения является участие в операции по поиску и перехвату УТС комплексов 28 воздушного наблюдения, установленных на беспилотных носителях, в качестве которых могут использоваться аэродинамические и аэростатические беспилотные носители.
Установленный на беспилотном носителе комплекс 28 воздушного наблюдения осуществляет панорамный обзор местности в пределах зоны ответственности данного центра 19 быстрого реагирования. Обзор осуществляется с помощью видеокамер и ИК-камер (в темное время суток), управляемых бортовым компьютером 29, соответственно с помощью блока 30 управления видеокамерой и блока 31 управления ИК-камерой. Получаемые видеоизображения передаются через блок 32 передачи видеоинформации по радиолинии передачи видеоинформации в центр 19 быстрого реагирования, которому придан комплекс 28 воздушного наблюдения. Переданная с борта беспилотного носителя видеоинформация принимается блоком 26 приема видеоинформации и передается в блок 25 обработки видеоинформации, с выхода которого обработанная видеоинформация поступает на АРМ’ы 22 операторов и на АРМ 23 администратора.
Управление беспилотным носителем осуществляется путем подачи команд управления, задаваемых с APM’a 23 администратора, на борт беспилотного носителя. В бортовом компьютере 29 эти команды преобразуются в управляющие воздействия, которые передаются в блоки 30 и 31 управления соответственно видео- и ПК-камерами и в органы 33 управления беспилотным носителем.
Положение видеокамер и ИК-камер в пространстве задается и стабилизируется с помощью инерциальной системы 34. Высота полета беспилотного носителя определяется высотомером 35. Данные инерциальной системы 34 и высотомера 35 передаются в бортовой компьютер 29 и используются при формировании управляющих воздействий на блоки 30 и 31 управления соответственно видео-и ИК-камерой.
Способ управления полетом беспилотного носителя зависит от вида используемого летательного аппарата. Так, видеонаблюдение с борта аэродинамического дистанционно-пилотируемого летательного аппарата осуществляется в режиме барражирования (кружения) летательного аппарата над зоной ответственности центра 19 быстрого реагирования, обслуживаемого данным комплексом 28 воздушного наблюдения. Передача видеоинформации в центр 19 быстрого реагирования и передача команд управления из центра 19 быстрого реагирования на борт беспилотного носителя осуществляются по радиоэфиру.
Видеонаблюдение с борта привязного беспилотного носителя - привязного аэростата или геостата - ведется в режиме висения этого летательного аппарата над центром 19 быстрого реагирования. Видеоинформация с борта летательного аппарата и команды управления из центра 19 быстрого реагирования могут передаваться в этом случае как по радиоэфиру, так и по проводному (оптоволоконному) кабелю, проложенному вдоль троса, удерживающего летательный аппарат.
Видеонаблюдение с борта дистанционно-управляемого вертолета может осуществляться как в режиме барражирования, так и в режиме зависания, а передача видеоинформации и команд управления - по радиоэфиру или по оптоволоконному кабелю.
Передаваемые с борта беспилотного носителя видео- и ИК-изображения представляют собой растровые изображения, пригодные для использования в ГИС, установленной на APM’ax 22 операторов и 23 администратора.
Так, вышеупомянутая ГИС GeoBuilder обеспечивает два варианта представления растровых данных:
- единое структурированное растровое пространство в заданной системе координат, подключенное через специализированный драйвер данного графического формата;- одиночные растровые файлы, логически объединенные в слои, подключенные через специализированные драйверы данного графического формата.
Видеоизображения, полученные с помощью комплекса 28 воздушного наблюдения, совмещаются с соответствующими фрагментами цифровой картографической основы, поступающими с сервера 24 условно-постоянной информации о городской инфраструктуре, и используются операторами АРМ 22 и 23 для уточнения "первичного целеуказания", получаемого из центра 5 обработки информации, для координации действий сил быстрого реагирования.
Одновременное наблюдение на видеоизображении относительного местоположения УТС и сил быстрого реагирования, участвующих в операциях по поиску и перехвату УТС, позволяет операторам наиболее точно оценить обстановку, а администратору сформировать необходимые рекомендации.
Использование пешими нарядами и экипажами патрульных машин носимых и возимых радиопеленгационных станций 27 позволяет оптимизировать процесс поиска и повысить вероятность перехвата УТС, независимо от погодных условий, времени суток и результатов видеонаблюдения с борта беспилотного носителя.
Таким образом, предлагаемое техническое решение позволяет уменьшить степень зависимости результата операции по поиску и перехвату УТС от различных факторов неопределенности, сократить время проведения операции и повысить вероятность ее успешного завершения, то есть решить поставленную задачу. Представленная последовательность действий обладает новизной и практически реализуется в описанном выше варианте построения комплексной автоматизированной системы управления с использованием серийно выпускаемых аппаратных и программных средств и поэтому может быть классифицирована как изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОПОИСКОВАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2244642C1 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| СПОСОБ КОМПЛЕКСНОЙ ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2159190C1 |
| РЕГИОНАЛЬНАЯ СИГНАЛЬНАЯ ПРОТИВОУГОННАЯ СИСТЕМА | 2003 |
|
RU2228861C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| СИСТЕМА ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2008 |
|
RU2345914C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2006 |
|
RU2320504C1 |
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2351489C1 |
| СИСТЕМА МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2243113C1 |
Изобретение относится к технике защиты транспортных средств (ТС) от угонов и краж. С угнанного ТС излучают тревожные сообщения с идентификационными признаками. На радиопеленгационных станциях с известными географическими координатами определяют координаты ТС и передают кодовые посылки в центр обработки информации. Местоположение ТС определяют, используя условно-постоянную информацию о городской инфраструктуре и транспортных потоках. Оповещения передают пользователям ТС и после получения голосового подтверждения факта угона блокируют ТС, например, по пейджинговой сети и передают сообщения в ближайшие к ТС центры быстрого реагирования. В процессе поиска и перехвата пеленгуют ТС носимыми или возимыми радиопеленгационными устройствами. В центрах быстрого реагирования поднимают в воздух на беспилотном носителе комплекс воздушного наблюдения и осуществляют видео-и инфракрасной камерами видеонаблюдение местности. Видеоинформацию отображают растровыми изображениями на рабочих местах операторов и администратора. После приема голосового уведомления об угоне обнаруживают и идентифицируют на растровых изображениях ТС, определяют его местонахождение и передают информацию пешим нарядам и экипажам патрульных машин. Изобретение позволяет сократить длительность и повысить вероятность перехвата ТС. 4 з.п. ф-лы, 3 ил.
| СПОСОБ КОМПЛЕКСНОЙ ОХРАНЫ ПОДВИЖНЫХ И НЕПОДВИЖНЫХ ОБЪЕКТОВ | 2000 |
|
RU2159190C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2106694C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |
| RU 94032452 А1, 20.05.1996. | |||

