Изобретение относится к машиностроению, в частности к робототехнике, к манипуляторам, выполняющим поступательные движения по трем координатам и вращение вокруг трех осей.
Изобретение может быть использовано в машиностроительной, легкой, текстильной, пищевой и других отраслях промышленности для выполнения как основных технологических операций, например, механической обработки изделий, так и вспомогательных операций, связанных с транспортировкой, сортировкой, укладкой и упаковкой полуфабрикатов и готовых изделий. Известно устройство (патент United States Patent Application Publication. Pub. No.: US 2007/0062321 A1. Pub. Date: Mar. 22, 2007. DEVICE FOR THE MOVEMENT AND ORIENTATION OF AN OBJECT IN SPACE AND USE THEREOF IN RAPID MACHINING. Inventors: Danien Chablat, Nantes (FR); Philippe Wenger, Sainte Luce Sur Loire (FR)), пространственный механизм с шестью степенями свободы включает основание, выходное звено, рабочий орган, кинематически связанный с выходным звеном, три кинематические цепи, содержащие каждая двигатель поступательного перемещения, расположенный параллельно одной из ортогональных осей координат, начальную вращательную кинематическую пару, ось которой расположена перпендикулярно оси соответствующего двигателя поступательного перемещения, шарнирный параллелограмм, начальное звено которого совмещено с осью соответствующей начальной вращательной кинематической пары, а вращательные кинематические пары шарнирного параллелограмма расположены перпендикулярно оси начальной вращательной кинематической пары, конечную вращательную кинематическую пару, ось которой совмещена с осью конечного звена шарнирного параллелограмма, конечное звено кинематической цепи, сопряженное с выходным звеном механизма, в двух кинематических цепях расположен двигатель вращательного перемещения, ось которого расположена параллельно оси соответствующего двигателя поступательного перемещения, а также выходная вращательная кинематическая пара, ось которой параллельна оси соответствующего двигателя вращательного перемещения, сопрягающая конечное звено соответствующей кинематической цепи с выходным звеном механизма, конечное звено двух кинематических цепей, содержащих двигатель вращательного перемещения, сопряжено с рабочим органом посредством промежуточных вращательных кинематических пар, причем в одной кинематической цепи расположены две промежуточные вращательные кинематические пары, а в другой кинематической цепи расположена одна промежуточная вращательная кинематическая пара, оси выходных и промежуточных вращательных кинематических пар расположены с пересечением в одной точке, а конечное звено третьей кинематической связано с выходным звеном механизма.
Недостатком данного устройства является наличие карданного вала для передачи вращения на рабочий орган. Это снижает надежность устройства и оказывает негативное влияние на его работоспособность в связи с тем, что карданный вал не обеспечивает высокую жесткость на кручение.
Целью данного изобретения является повышение надежности и технической эффективности устройства за счет того, что вращательные движения передаются через механизм параллелограмма, а не через карданный вал.
Поставленная цель достигается тем, что известное устройство, пространственный механизм с шестью степенями свободы, включает основание, выходное звено, рабочий орган, кинематически связанный с выходным звеном, три кинематические цепи, содержащие каждая двигатель поступательного перемещения, расположенный параллельно одной из ортогональных осей координат, начальную вращательную кинематическую пару, ось которой расположена перпендикулярно оси соответствующего двигателя поступательного перемещения, шарнирный параллелограмм, начальное звено которого совмещено с осью соответствующей начальной вращательной кинематической пары, а вращательные кинематические пары шарнирного параллелограмма расположены перпендикулярно оси начальной вращательной кинематической пары, конечную вращательную кинематическую пару, ось которой совмещена с осью конечного звена шарнирного параллелограмма, конечное звено кинематической цепи, сопряженное с выходным звеном механизма, в двух кинематических цепях расположен двигатель вращательного перемещения, ось которого расположена параллельно оси соответствующего двигателя поступательного перемещения, а также выходная вращательная кинематическая пара, ось которой параллельна оси соответствующего двигателя вращательного перемещения, сопрягающая конечное звено соответствующей кинематической цепи с выходным звеном механизма, конечное звено двух кинематических цепей, содержащих двигатель вращательного перемещения, сопряжено с рабочим органом посредством промежуточных вращательных кинематических пар, причем в одной кинематической цепи расположены две промежуточные вращательные кинематические пары, а в другой кинематической цепи расположена одна промежуточная вращательная кинематическая пара, оси выходных и промежуточных вращательных кинематических пар расположены с пересечением в одной точке, а конечное звено третьей кинематической связано с выходным звеном механизма, кинематическая цепь, содержащая двигатель вращательного перемещения, конечное звено которой сопряжено с рабочим органом посредством одной промежуточной вращательной кинематической пары, снабжена дополнительной промежуточной вращательной кинематической парой, а третья кинематическая цепь снабжена двигателем вращательного перемещения, ось которого расположена параллельно оси соответствующего двигателя поступательного перемещения, а также выходной вращательной кинематической парой, ось которой параллельна оси соответствующего двигателя вращательного перемещения, сопрягающей конечное звено соответствующей кинематической цепи с выходным звеном механизма, кроме того, эта кинематическая цепь снабжена двумя дополнительными промежуточными вращательными кинематическими парами, сопрягающими конечное звено данной кинематической цепи с рабочим органом, а конечные звенья всех кинематических цепей сопряжены посредством выходных вращательных кинематических пар с выходным звеном механизма.
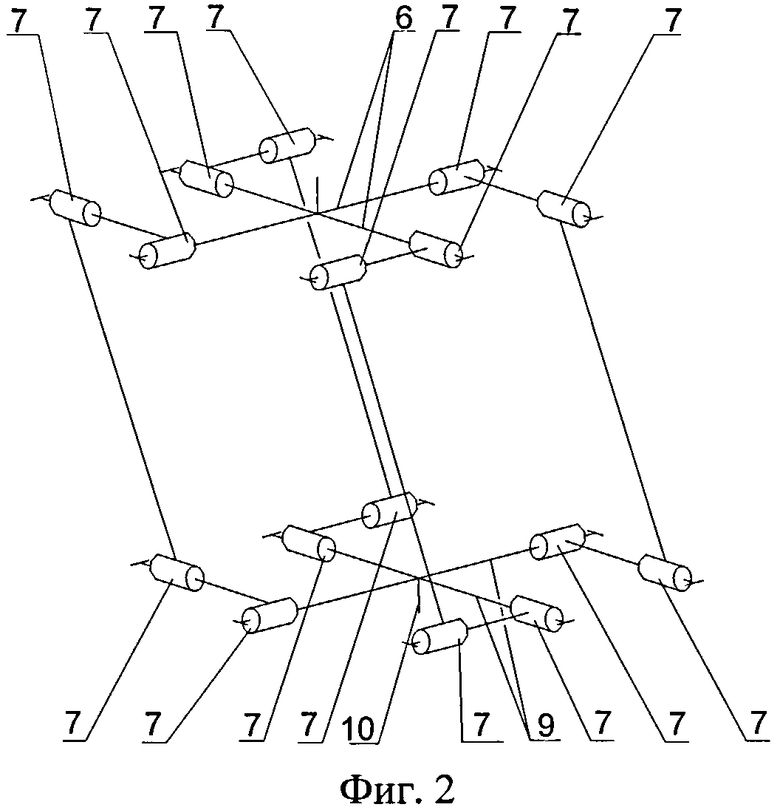
Фиг.1 - пространственный механизм с шестью степенями свободы.
Фиг.2 - дополнительный шарнирный параллелограмм.
Пространственный механизм с шестью степенями свободы (Фиг.1) включает основание (1, 1', 1"), выходное звено (2), рабочий орган (3), кинематически связанный с выходным звеном (2) и три кинематические цепи. Каждая кинематическая цепь содержит двигатель поступательного перемещения (4, 4', 4"), расположенный параллельно одной из ортогональных осей координат, начальную вращательную кинематическую пару (5, 5', 5"), ось которой расположена перпендикулярно оси соответствующего двигателя поступательного перемещения (4, 4', 4"), шарнирный параллелограмм, начальное звено (6, 6', 6") которого совмещено с осью соответствующей начальной вращательной кинематической пары (5, 5', 5"), а вращательные кинематические пары шарнирного параллелограмма (7, 7', 7") расположены перпендикулярно оси начальной вращательной кинематической пары (5, 5', 5"), конечную вращательную кинематическую пару (8, 8', 8"), ось которой совмещена с осью конечного звена шарнирного параллелограмма (9, 9', 9"), конечное звено кинематической цепи (10, 10', 10"), сопряженное с выходным звеном механизма (2). В двух кинематических цепях расположены двигатели вращательного перемещения (11, 11'), оси которых расположены параллельно осям соответствующих двигателей поступательного перемещения (4, 4'), а также выходные вращательные кинематические пары (12, 12'), оси которых параллельны осям соответствующих двигателей вращательного перемещения (11, 11'). Каждая из вращательных пар (12, 12') сопрягает конечное звено (10, 10') соответствующей кинематической цепи с выходным звеном механизма (2). Конечные звенья (10, 10') двух кинематических цепей, содержащих двигатели вращательного перемещения (11, 11'), сопряжены с рабочим органом (3) посредством промежуточных вращательных кинематических пар (13, 13'). При этом в одной кинематической цепи расположены две промежуточные вращательные кинематические пары (13), а в другой кинематической цепи расположена одна промежуточная вращательная кинематическая пара (13'). Оси выходных (12, 12') и промежуточных (13, 13') вращательных кинематических пар расположены с пересечением в одной точке, а конечное звено (10") третьей кинематической цепи связано с выходным звеном механизма (2). Кинематическая цепь, содержащая двигатель вращательного перемещения (11'), конечное звено (10') которой сопряжено с рабочим органом (3) посредством одной промежуточной вращательной кинематической пары (13'), снабжена дополнительной промежуточной вращательной кинематической парой (13'). Третья кинематическая цепь снабжена двигателем вращательного перемещения (11"), ось которого расположена параллельно оси соответствующего двигателя поступательного перемещения (4"), а также выходной вращательной кинематической парой (12"), ось которой параллельна оси соответствующего двигателя вращательного перемещения (11"), сопрягающей конечное звено (10") соответствующей кинематической цепи с выходным звеном механизма (2), кроме того эта кинематическая цепь снабжена двумя дополнительными промежуточными вращательными кинематическими парами (13"), сопрягающими конечное звено (10") данной кинематической цепи с рабочим органом (3). Конечные звенья (10, 10', 10") всех кинематических цепей сопряжены посредством выходных вращательных кинематических пар (12, 12', 12") с выходным звеном механизма (2).
Устройство, пространственный механизм с шестью степенями свободы, работает следующим образом. Относительно основания (1, 1', 1") выходное звено (2) вместе с кинематически связанным с ним рабочим органом (3) перемещается посредством трех кинематических цепей. В каждой кинематической цепи двигатель поступательного перемещения (4, 4', 4"), расположенный параллельно одной из ортогональных осей координат, передает движение на соответствующую начальную вращательную кинематическую пару (5, 5', 5"), ось которой расположена перпендикулярно оси соответствующего двигателя поступательного перемещения (4, 4', 4"). Затем движение передается на соответствующий шарнирный параллелограмм, начальное звено (6, 6', 6") которого совмещено с осью соответствующей начальной вращательной кинематической пары (5, 5', 5"), а вращательные кинематические пары шарнирного параллелограмма (7, 7', 7") расположены перпендикулярно оси начальной вращательной кинематической пары (5, 5', 5"). Каждый шарнирный параллелограмм выполняет функцию поступательной кинематической пары. Далее движение передается на соответствующую конечную вращательную кинематическую пару (8, 8', 8"), ось которой совмещена с осью конечного звена шарнирного параллелограмма (9, 9', 9"). После этого движение передается на соответствующее конечное звено кинематической цепи (10, 10', 10"), сопряженное с выходным звеном механизма (2). Двигатели вращательного перемещения (11, 11'), расположенные в двух кинематических цепях с осями, параллельными осям соответствующих двигателей поступательного перемещения (4, 4'), передают движение на соответствующие начальные вращательные кинематические пары (5, 5'). Затем движение передается на соответствующие шарнирные параллелограммы, начальные звенья (6, 6') которых совмещены с осями соответствующих начальных вращательных кинематических пар (5, 5'), а вращательные кинематические пары параллелограмма (7, 7') расположены перпендикулярно осям начальных вращательных кинематических пар (5, 5'). Далее движение передается на соответствующие конечные вращательные кинематические пары (8, 8'), оси которых совмещены с осями конечных звеньев шарнирного параллелограмма (9, 9'). После этого движение передается на соответствующие конечные звенья кинематических цепей (10, 10'), сопряженных с выходным звеном механизма (2) посредством выходных вращательных кинематических пар (12, 12'), оси которых параллельны осям соответствующих двигателей вращательного перемещения (11, 11'). Эти выходные вращательные кинематические пары (12, 12'), оси которых параллельны осям соответствующих двигателей вращательного перемещения (4, 4'), сопрягают конечные звенья (10, 10') соответствующих кинематических цепей с выходным звеном (2) механизма. Конечное звено каждой из двух кинематических цепей (10, 10'), содержащих двигатель вращательного перемещения (11, 11'), сопряжено с рабочим органом (3) посредством промежуточной вращательной кинематической пары (13, 13'), причем в одной кинематической цепи расположены две промежуточные вращательные кинематические пары (13), а в другой кинематической цепи расположена одна промежуточная вращательная кинематическая пара (13'). Оси выходных (12, 12') и промежуточных (13, 13') вращательных кинематических пар расположены с пересечением в одной точке, а конечное звено (10") третьей кинематической цепи связано с выходным звеном механизма (2). Кинематическая цепь, содержащая двигатель вращательного перемещения (11'), конечное звено (10') которой сопряжено с рабочим органом (3) посредством одной промежуточной вращательной кинематической пары (13'), снабжена дополнительной промежуточной вращательной кинематической парой (13'). Третья кинематическая цепь снабжена двигателем вращательного перемещения (11"), ось которого расположена параллельно оси соответствующего двигателя поступательного перемещения (4"), а также выходной вращательной кинематической парой (12"), ось которой параллельна оси соответствующего двигателя вращательного перемещения (11"), сопрягающей конечное звено (10") соответствующей кинематической цепи с выходным звеном механизма (2). Кроме того эта кинематическая цепь снабжена двумя дополнительными промежуточными вращательными кинематическими парами (13"), сопрягающими конечное звено (10") данной кинематической цепи с рабочим органом (3).
Поскольку конечные звенья (10, 10', 10") всех кинематических цепей сопряжены посредством выходных вращательных кинематических пар (12, 12', 12") с выходным звеном механизма (2) и промежуточных вращательных кинематических пар (13, 13', 13") с рабочим органом (3), то вращение с двигателей вращательного перемещения (11, 11', 11") передается на рабочий орган (3).
Для увеличения жесткости любой шарнирный параллелограмм может быть снабжен дополнительным шарнирным параллелограммом, расположенным под углом к первому шарнирному параллелограмму (Фиг.2). При этом оси вращательных кинематических пар шарнирного параллелограмма могут быть расположены по разные стороны от оси соответствующей начальной вращательно кинематической пары данной кинематической цепи.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534706C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455147C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455146C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403141C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2009 |
|
RU2412798C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ТРЕМЯ ПОСТУПАТЕЛЬНЫМИ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2466013C1 |
| РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2063329C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534675C1 |
| ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2465124C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403140C2 |
Изобретение относится к робототехнике, в частности к манипуляторам, выполняющим поступательные движения по трем координатам и вращение вокруг трех осей. Механизм содержит основание, выходное звено, рабочий орган, три кинематические цепи. Каждая кинематическая цепь содержит двигатель поступательного перемещения, расположенный параллельно одной из ортогональных осей координат, начальную вращательную кинематическую пару, ось которой расположена перпендикулярно оси соответствующего двигателя поступательного перемещения, шарнирный параллелограмм, начальное звено которого совмещено с осью соответствующей начальной вращательной кинематической пары, а вращательные кинематические пары шарнирного параллелограмма расположены перпендикулярно оси начальной вращательной кинематической пары, конечную вращательную кинематическую пару, ось которой совмещена с осью конечного звена шарнирного параллелограмма, конечное звено кинематической цепи, сопряженное с выходным звеном механизма. Технический результат - повышение надежности и эффективности работы устройства обеспечивается за счет того, что вращательные движения передаются через механизм параллелограмма, а не через карданный вал. 2 ил.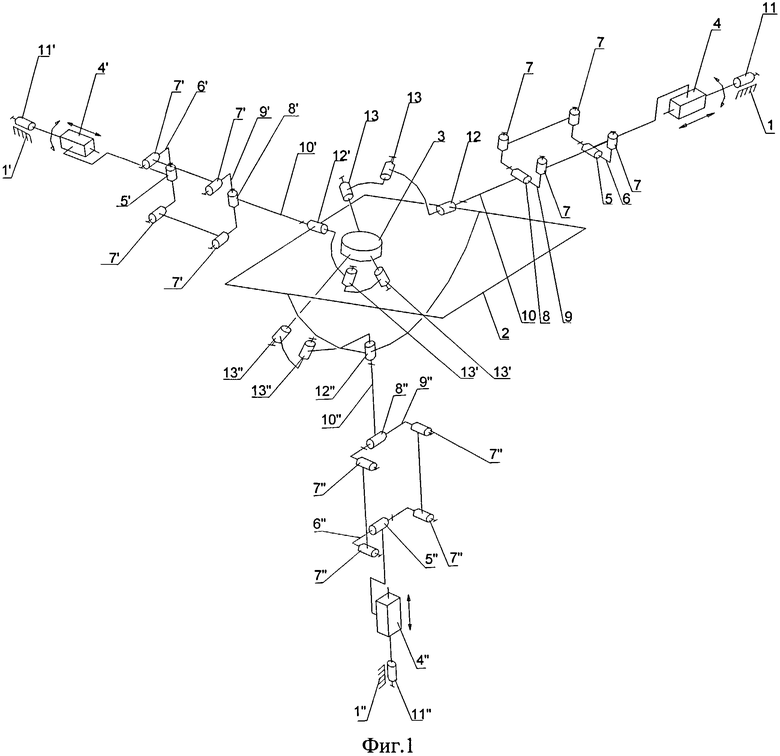
Пространственный механизм с шестью степенями свободы, содержащий основание, выходное звено, рабочий орган, кинематически связанный с выходным звеном, три кинематические цепи, содержащие каждая двигатель поступательного перемещения, расположенный параллельно одной из ортогональных осей координат, начальную вращательную кинематическую пару, ось которой расположена перпендикулярно оси соответствующего двигателя поступательного перемещения, шарнирный параллелограмм, начальное звено которого совмещено с осью соответствующей начальной вращательной кинематической пары, а вращательные кинематические пары шарнирного параллелограмма расположены перпендикулярно оси начальной вращательной кинематической пары, конечную вращательную кинематическую пару, ось которой совмещена с осью конечного звена шарнирного параллелограмма, конечное звено кинематической цепи, сопряженное с выходным звеном механизма, в двух кинематических цепях расположен двигатель вращательного перемещения, ось которого расположена параллельно оси соответствующего двигателя поступательного перемещения, а также выходная вращательная кинематическая пара, ось которой параллельна оси соответствующего двигателя вращательного перемещения, сопрягающая конечное звено соответствующей кинематической цепи с выходным звеном механизма, конечное звено двух кинематических цепей, содержащих двигатель вращательного перемещения, сопряжено с рабочим органом посредством промежуточных вращательных кинематических пар, причем в одной кинематической цепи расположены две промежуточные вращательные кинематические пары, а в другой кинематической цепи расположена одна промежуточная вращательная кинематическая пара, оси выходных и промежуточных вращательных кинематических пар расположены с пересечением в одной точке, а конечное звено третьей кинематической цепи связано с выходным звеном механизма, отличающийся тем, что кинематическая цепь, содержащая двигатель вращательного перемещения, конечное звено которой сопряжено с рабочим органом посредством одной промежуточной вращательной кинематической пары, снабжена дополнительной промежуточной вращательной кинематической парой, третья кинематическая цепь снабжена двигателем вращательного перемещения, ось которого расположена параллельно оси соответствующего двигателя поступательного перемещения, а также выходной вращательной кинематической парой, ось которой параллельна оси соответствующего двигателя вращательного перемещения, сопрягающей конечное звено соответствующей кинематической цепи с выходным звеном механизма, причем третья кинематическая цепь снабжена двумя дополнительными промежуточными вращательными кинематическими парами, сопрягающими конечное звено данной кинематической цепи с рабочим органом, а конечные звенья всех кинематических цепей сопряжены посредством выходных вращательных кинематических пар с выходным звеном механизма.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403141C2 |
| Пространственный механизм | 1991 |
|
SU1779576A1 |
| Способ создания ускорений | 1957 |
|
SU113193A1 |
| Mianovski К | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

