Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов с тремя поступательными степенями свободы.
Целью изобретения является повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве с тремя поступательными степенями свободы.
Известно устройство (R.Clavel, "Device for the movement and positioning of an element in space," US Patent No. 4,976,582, Dec.11, 1990) пространственный механизм, включающий основание, конечное звено, связанное с установленными на основании двигателями вращательного перемещения посредством вращательных кинематических пар и промежуточных звеньев.
Недостатком данного устройства является наличие в кинематической схеме параллелограммов, которые сложны в изготовлении и усложняют конструкцию.
За прототип взято устройство - пространственный механизм (Carricato М., Parenti-Castelli V., "On the Topological and Geometrical Synthesis and Classification of Translational Parallel Mechanisms," Proceedings of the 11th World Congress in Mechanism and Machine Science. April 1-4, 2004, Tianjin, China, Figure 2), включающий основание, выходное звено, три кинематических цепи, содержащих каждая входной вращательный шарнир, три промежуточных вращательных шарнира и конечный вращательный шарнир, причем шарниры разделены на две группы соответственно из двух и трех шарниров, оси которых параллельны друг другу и перпендикулярны осям шарниров другой группы, ось второго промежуточного шарнира перпендикулярна оси входного шарнира, а оси входных вращательных шарниров расположены ортогонально друг другу и параллельно осям декартовой системы координат.
Недостатком данного устройства является наличие в каждой кинематической цепи двух подвижных карданных шарниров. Это усложняет конструкцию и снижает ее надежность.
Технический результат - повышение эффективности и надежности устройств манипулирования в пространстве по трем координатам.
Технический результат достигается тем, что пространственный механизм с тремя поступательными степенями свободы включает выходное звено, три кинематических цепи, содержащих каждая входной вращательный шарнир, три промежуточных вращательных шарнира и конечный вращательный шарнир, причем шарниры разделены на две группы соответственно из двух и трех шарниров, оси которых параллельны друг другу и перпендикулярны осям шарниров другой группы, ось второго промежуточного шарнира перпендикулярна оси входного шарнира, а оси входных вращательных шарниров расположены ортогонально друг другу и параллельно осям декартовой системы координат, причем ось первого промежуточного вращательного шарнира расположена перпендикулярно оси входного вращательного шарнира с пересечением их осей, ось третьего промежуточного вращательного шарнира и ось конечного вращательного шарнира расположены параллельно оси входного вращательного шарнира.
Устройство - пространственный механизм с тремя поступательными степенями свободы - представлено на фигуре 1.
Пространственный механизм с тремя поступательными степенями свободы включающий основание 1, выходное звено 2, три кинематических цепи, содержащих каждая входной вращательный шарнир 3 (3', 3”), три промежуточных вращательных шарнира 4, 5, 6 (4', 4”; 5', 5”; 6', 6”) и конечный вращательный шарнир 7 (7', 7”), причем шарниры разделены на две группы соответственно из двух (шарниры 4 (4', 4”) и 5 (5', 5”)) и трех (шарниры (3', 3”), 6 (6', 6”), и 7 (7', 7”)) шарниров, оси которых параллельны друг другу и перпендикулярны осям шарниров другой группы, ось второго промежуточного шарнира перпендикулярна оси входного шарнира, а оси входных вращательных шарниров расположены ортогонально друг другу и параллельно осям декартовой системы координат, ось первого промежуточного вращательного шарнира 4 (4', 4”) расположена перпендикулярно оси входного вращательного шарнира 3 (3', 3”) с пересечением их осей, ось третьего промежуточного вращательного шарнира 6 (6', 6”) и ось конечного вращательного шарнира 7 (7', 7”) расположены параллельно оси входного вращательного шарнира 3 (3', 3”).
Устройство - пространственный механизм с тремя поступательными степенями свободы работает следующим образом.
Относительно основания 1 конечное звено 2 перемещается поступательно по трем координатам посредством трех кинематических цепей. Вращение входных вращательных шарниров 3 (3', 3”) передается через три промежуточных вращательных шарнира 4, 5, 6 (4', 4”; 5', 5”; 6',6”) на конечный вращательный шарнир 7 (7', 7”), при этом шарниры разделены на две группы соответственно из двух (шарниры 4 (4', 4”) и 5 (5', 5”)) и трех (шарниры 3 (3', 3”), 6 (6', 6”), и 7 (7', 7”)) шарниров, оси которых параллельны друг другу и перпендикулярны осям шарниров другой группы, ось второго промежуточного шарнира перпендикулярна оси входного шарнира, а оси входных вращательных шарниров расположены ортогонально друг другу и параллельно осям декартовой системы координат, ось первого промежуточного вращательного шарнира 4 (4', 4”) расположена перпендикулярно оси входного вращательного шарнира 3 (3', 3”) с пересечением их осей, ось третьего промежуточного вращательного шарнира 6 (6', 6”) и ось конечного вращательного шарнира 7 (7', 7”) расположены параллельно оси входного вращательного шарнира 3 (3', 3”), что обеспечивает строго поступательные движения конечного звена 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2465124C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2009 |
|
RU2412798C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534706C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2536735C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534675C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403141C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403140C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455146C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455147C2 |
| МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2012 |
|
RU2498895C2 |
Изобретение относится к машиностроению, в частности к робототехнике. Пространственный механизм включает основание, выходное звено, три кинематических цепи, содержащие каждая входной вращательный шарнир, три промежуточных вращательных шарнира и конечный вращательный шарнир. Причем шарниры в каждой цепи разделены на две группы соответственно из двух и трех шарниров, оси которых параллельны друг другу и перпендикулярны осям шарниров другой группы. Ось второго промежуточного шарнира перпендикулярна оси входного шарнира, а оси входных вращательных шарниров расположены ортогонально друг другу и параллельно осям декартовой системы координат. Ось первого промежуточного вращательного шарнира в каждой цепи расположена перпендикулярно оси входного вращательного шарнира с пересечением их осей. А ось третьего промежуточного вращательного шарнира и ось конечного вращательного шарнира расположены параллельно оси входного вращательного шарнира. Изобретение направлено на повышение эффективности и надежности устройств манипулирования в пространстве по трем координатам. 1 ил.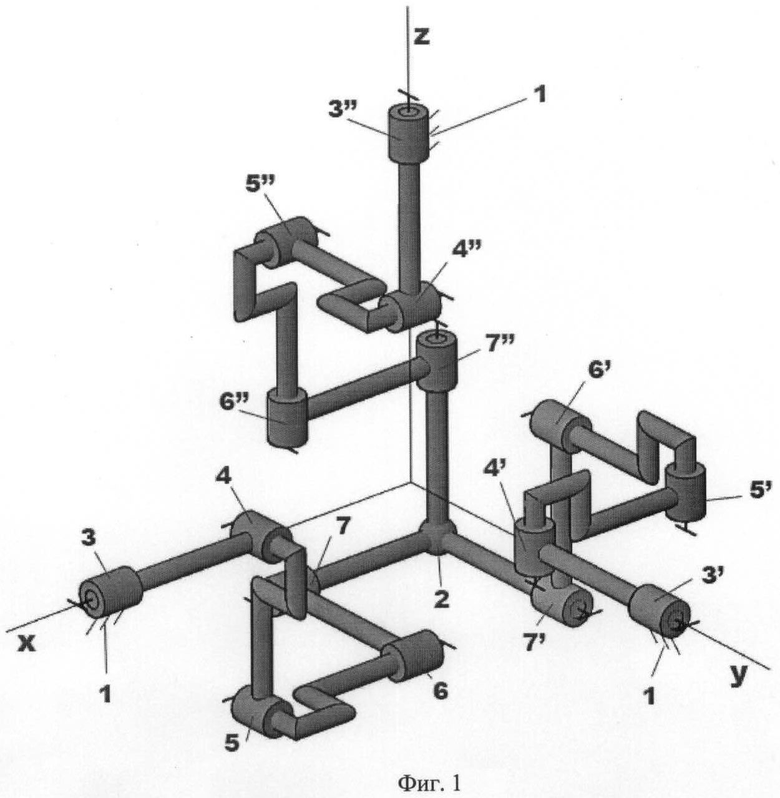
Пространственный механизм с тремя поступательными степенями свободы, включающий основание, выходное звено, три кинематических цепи, содержащие каждая входной вращательный шарнир, три промежуточных вращательных шарнира и конечный вращательный шарнир, причем шарниры в каждой цепи разделены на две группы соответственно из двух и трех шарниров, оси которых параллельны друг другу и перпендикулярны осям шарниров другой группы, ось второго промежуточного шарнира перпендикулярна оси входного шарнира, а оси входных вращательных шарниров расположены ортогонально друг другу и параллельно осям декартовой системы координат, отличающийся тем, что ось первого промежуточного вращательного шарнира в каждой цепи расположена перпендикулярно оси входного вращательного шарнира с пересечением их осей, а ось третьего промежуточного вращательного шарнира и ось конечного вращательного шарнира расположены параллельно оси входного вращательного шарнира.
| US 4976582 А, 11.12.1990 | |||
| J.-P | |||
| Merlet, Parallel Robots (Second Edition), Springer 2006, pages 27-35 | |||
| Huda S., Takeda Y., "Dimensional Synthesis of 3-URU Pure Rotational Parallel Mechanism with Respect to Singularity and Workspace", 12th IFToMM World Congress, Besancon (France), June 18-21, 2007, Fig.1 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Проходческий агрегат со щитом | 1952 |
|
SU99371A1 |

