Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов с тремя степенями свободы - тремя ориентирующими движениями.
Известно устройство (Kong X., Gosselin С., "Type Synthesis of Parallel Mechanisms", Springer Tracts in Advanced Robotics Volume 33, 2007, Fig. 7.10. Six S=PMs shown in an isotropic configuration (а)), пространственный сферический механизм с тремя степенями свободы, содержащий основание, выходное звено, три кинематические цепи, включающие каждая вращательный двигатель, расположенный на основании, начальную вращательную кинематическую пару, расположенную перпендикулярно оси двигателя с пересечением его оси, конечную вращательную пару, сопряженную с выходным звеном, причем оси всех двигателей, промежуточных и конечных кинематических пар расположены с пересечением в центре декартовой системы координат.
Известно устройство (Хейло С.В. "Решение задачи кинематики сферического манипулятора параллельной структуры". Машиностроение и инженерное образование: 2010, №4, стр.18-22, рис.1 (стр18)), пространственный сферический механизм с тремя степенями свободы, содержащий основание, выходное звено, три кинематические цепи, включающие каждая вращательный двигатель, расположенный на основании, начальную вращательную кинематическую пару, расположенную перпендикулярно оси двигателя с пересечением его оси, конечную вращательную пару, сопряженную с выходным звеном, причем оси всех двигателей, промежуточных и конечных кинематических пар расположены с пересечением в центре декартовой системы координат.
Недостатком данных устройств является сложность конструкции, обусловленная необходимостью располагать звенья кинематической пары в одной полуплоскости на близком расстоянии друг от друга.
За прототип взято устройство (Huda S., Takeda Y., "Dimensional Synthesis of 3-URU Pure Rotational Parallel Mechanism with Respect to Singularity and Workspace", 12th IFToMM World Congress,  (France), June 18-21, 2007, Fig. 1. Kinematic diagram of the 3-URU mechanism), пространственный сферический механизм с тремя степенями свободы, содержащий основание, выходное звено, три кинематические цепи, включающие каждая вращательный двигатель, расположенный на основании, начальную вращательную кинематическую пару, расположенную перпендикулярно оси двигателя с пересечением его оси, две промежуточные вращательные пары, расположенные параллельно оси начальной пары, конечную вращательную пару, расположенную перпендикулярно оси второй промежуточной пары с пересечением ее оси и сопряженную с выходным звеном, причем оси всех двигателей и конечных кинематических пар расположены с пересечением в центре декартовой системы координат.
(France), June 18-21, 2007, Fig. 1. Kinematic diagram of the 3-URU mechanism), пространственный сферический механизм с тремя степенями свободы, содержащий основание, выходное звено, три кинематические цепи, включающие каждая вращательный двигатель, расположенный на основании, начальную вращательную кинематическую пару, расположенную перпендикулярно оси двигателя с пересечением его оси, две промежуточные вращательные пары, расположенные параллельно оси начальной пары, конечную вращательную пару, расположенную перпендикулярно оси второй промежуточной пары с пересечением ее оси и сопряженную с выходным звеном, причем оси всех двигателей и конечных кинематических пар расположены с пересечением в центре декартовой системы координат.
Недостатком данного устройства является то, что в нем оси приводов расположены под углом к осям декартовой системы координат, что затрудняет решение задач о положениях и управлении манипулятором.
Технический результат - устранение отмеченных недостатков и повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по трем вращательным координатам при упрощении решения задачи о положениях.
Технический результат достигается тем, что пространственный сферический механизм с тремя степенями свободы содержит основание, выходное звено, три кинематические цепи, включающие каждая вращательный двигатель, расположенный на основании, начальную вращательную кинематическую пару, расположенную перпендикулярно оси двигателя с пересечением его оси, в двух кинематических цепях, кроме того, содержатся две промежуточные вращательные пары, расположенные параллельно оси начальной пары, конечная вращательная пара, расположенная перпендикулярно оси второй промежуточной пары с пересечением ее оси и сопряженная с выходным звеном, в третьей кинематической цепи содержится конечная вращательная пара, расположенная перпендикулярно оси начальной кинематической пары, причем оси всех двигателей и конечных кинематических пар всех цепей расположены с пересечением в центре декартовой системы координат с осями х, у, z, новым является то, что в первой кинематической цепи ось вращательного двигателя расположена вдоль оси х, ось начальной вращательной пары расположена параллельно оси у, ось конечной вращательной пары расположена вдоль оси z, во второй кинематической цепи ось вращательного двигателя расположена вдоль оси у, ось начальной вращательной пары расположена параллельно оси х, ось конечной вращательной пары расположена вдоль оси z, в третьей кинематической цепи ось вращательного двигателя расположена вдоль оси z, ось начальной вращательной пары расположена вдоль оси х, ось конечной вращательной пары расположена вдоль оси у, а ось выходного звена расположена вдоль оси z.
На фигуре 1 представлено устройство - пространственный сферический механизм с тремя степенями свободы.
Пространственный сферический механизм с тремя степенями свободы содержащит основание 1, выходное звено 2, три кинематические цепи, включающие каждая вращательный двигатель 3 (3', 3”), расположенные на основании 1, начальную вращательную кинематическую пару 4 (4', 4"), расположенные перпендикулярно оси двигателя 3 (3', 3”) с пересечением его оси, в двух кинематических цепях, кроме того, содержатся две промежуточные вращательные пары 5 (5') и 6 (6'), расположенные параллельно оси начальной пары 4 (4'), конечная вращательная пара 7 (7'), расположенная перпендикулярно оси второй промежуточной пары 6 (6') с пересечением ее оси и сопряженная с выходным звеном 2. В третьей кинематической цепи содержится конечная вращательная пара 7", расположенная перпендикулярно оси начальной кинематической пары 4", причем оси всех двигателей и конечных кинематических пар всех цепей расположены с пересечением в центре декартовой системы координат, отличающийся тем, что в первой кинематической цепи ось вращательного двигателя 3 расположена вдоль оси х, ось начальной вращательной пары 4 расположена параллельно оси у, ось конечной вращательной пары 7 расположена вдоль оси z, для второй кинематической цепи ось вращательного двигателя 3' расположена вдоль оси у, ось начальной вращательной пары 4' расположена параллельно оси х, ось конечной вращательной пары 7' расположена вдоль оси z, в третьей кинематической цепи ось вращательного двигателя 3" расположена вдоль оси z, ось начальной вращательной пары 4" расположена вдоль оси х, ось конечной вращательной пары 7" расположена вдоль оси у, а ось выходного звена 2 расположена вдоль оси z.
Устройство - пространственный сферический механизм - работает следующим образом.
Относительно основания 1 конечное звено 2 перемещается (вращается) по трем координатам посредством трех соединительных кинематических цепей. Два двигателя вращательного перемещения 3 (3'), установленных на основании 1, передают вращение начальным вращательным кинематическим парам 4 (4'), расположенным перпендикулярно оси двигателя 3 (3') с пересечением его оси, далее вращение передается на две промежуточные вращательные пары 5 (5') и 6 (6'), расположенные параллельно оси начальной пары 4 (4'), и затем движение (вращение) передается на конечные вращательные пары 7 (7'), расположенные перпендикулярно оси второй промежуточной пары 6 (6') с пересечением ее оси, перемещают конечное звено по двум координатам. Двигатель вращательного перемещения 3", установленный на основании 1, передает вращение начальной вращательной кинематической паре 4", расположенной вдоль оси двигателя 3", далее движение передается конечной вращательной паре 7", расположенной вдоль оси двигателя 3", перемещает конечное звено по одной координате.
Поскольку оси двигателей 3 (3', 3") и конечной вращательной пары 7 (7', 7") расположены с пересечением в центре декартовой системы координат, ось промежуточной вращательной пары 4" пересекает центр О декартовой системы координат, а оси промежуточных вращательных пар 4 (4'), 5 (5') и 6 (6') параллельны друг другу и перпендикулярны осям двигателей 3 (3') и конечной пары 7 (7'), то эти три промежуточные пары 4 (4'), 5 (5') и 6 (6') обеспечивают вращение вокруг оси также пересекающей центр декартовой системы координат, таким образом обеспечивая возможность образования сферической структуры и передачу вращения вокруг трех осей конечному звену 2 со стороны вращающихся двигателей 3 (3', 3").
Устройство предназначено для манипуляций заготовками и изделиями, в различных измерительных системах, в испытательных стендах, в обработке деталей и заготовок с помощью различных инструментов, в сборочных операциях, в хирургии и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ТРЕМЯ ПОСТУПАТЕЛЬНЫМИ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2466013C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534675C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2536735C1 |
| МЕХАНИЗМ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2012 |
|
RU2498895C2 |
| СФЕРИЧЕСКИЙ V-МАНИПУЛЯТОР | 2020 |
|
RU2730345C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534706C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2009 |
|
RU2412798C2 |
| КРУГОВОЙ ПРОСТРАНСТВЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2758385C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455146C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403141C2 |
Изобретение относится к пространственным манипуляционным механизмам роботов с тремя степенями свободы - тремя ориентирующими движениями. Механизм содержит основание, выходное звено, три кинематические цепи, включающие каждая вращательный двигатель, расположенный на основании, начальную вращательную кинематическую пару, расположенную перпендикулярно оси двигателя. При этом две кинематические цепи содержат две промежуточные вращательные пары, расположенные параллельно оси начальной пары, и конечную вращательную пару, расположенную перпендикулярно оси второй промежуточной пары и сопряженную с выходным звеном. Третья кинематическая цепь содержит конечную вращательную пару, расположенную перпендикулярно оси начальной кинематической пары. Причем оси всех двигателей и конечных кинематических пар всех цепей расположены с пересечением в центре декартовой системы координат с осями х, у, z. Изобретение обеспечивает повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по трем вращательным координатам. 1 ил.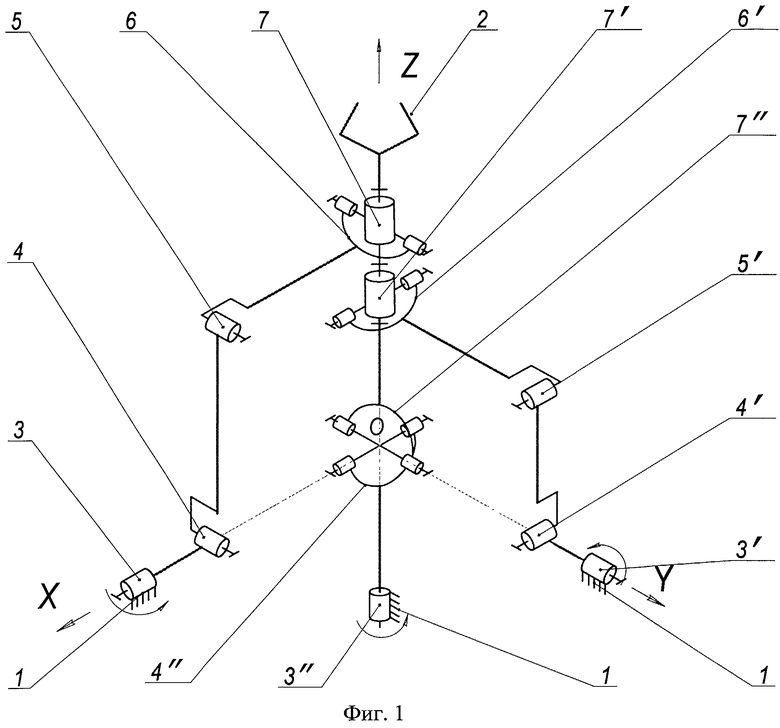
Пространственный сферический механизм с тремя степенями свободы, содержащий основание, выходное звено, три кинематические цепи, включающие каждая вращательный двигатель, расположенный на основании, начальную вращательную кинематическую пару, расположенную перпендикулярно оси двигателя с пересечением его оси, при этом две кинематические цепи содержат две промежуточные вращательные пары, расположенные параллельно оси начальной пары, и конечную вращательную пару, расположенную перпендикулярно оси второй промежуточной пары с пересечением ее оси и сопряженную с выходным звеном, а третья кинематическая цепь содержит конечную вращательную пару, расположенную перпендикулярно оси начальной кинематической пары, причем оси всех двигателей и конечных кинематических пар всех цепей расположены с пересечением в центре декартовой системы координат с осями х, у, z, отличающийся тем, что в первой кинематической цепи ось вращательного двигателя расположена вдоль оси х, ось начальной вращательной пары расположена параллельно оси у, ось конечной вращательной пары расположена вдоль оси z, во второй кинематической цепи ось вращательного двигателя расположена вдоль оси у, ось начальной вращательной пары расположена параллельно оси х, ось конечной вращательной пары расположена вдоль оси z, в третьей кинематической цепи ось вращательного двигателя расположена вдоль оси z, ось начальной вращательной пары расположена вдоль оси х, ось конечной вращательной пары расположена вдоль оси у, а ось выходного звена расположена вдоль оси z.
| Huda S., Takeda Y | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Kim H.S | |||
| Tsai, L | |||
| - W | |||
| Design optimization of a Cartesian parallel manipulator Journal of Mechanical | |||

