Изобретение относится к машиностроению, в частности к робототехнике, а именно к пространственным манипуляционным механизмам роботов с четырьмя степенями свободы с кинематической развязкой. Робот совершает три поступательных движения и вращения вокруг произвольной вертикальной оси.
Целью изобретения является повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по четырем координатам на базе кинематической развязки. При этом приводы поступательного перемещения должны обеспечивать соответствующие поступательные перемещения конечного звена, а привод вращательного движения должен обеспечивать вращение конечного звена вокруг вертикальной оси.
Известно устройство - пространственный механизм (R.Clavel, 1990, "Device for movement and displacing of an element in space", US Patent No.4,976,582, December II), включающий основание, конечное звено, связанное с установленными на основании двигателями вращательного перемещения посредством вращательных кинематических пар и промежуточных звеньев.
Недостатком данного устройства является отсутствие кинематической развязки между вертикальным перемещением и перемещениями в плоскости.
За прототип взято устройство - пространственный механизм (Arakelyan V., Maurine P., Briot S., Pion E., 2005, "Parallel robot comprising means for setting in motion a mobile element split in two separate subassemblies," Patent No. WO 2006/021629 A1, 02.03.2006), включающий основание, конечное звено, связанное посредством трех идентичных кинематических цепей, выполненных в виде пантографного механизма и цилиндрической передачи с тремя вертикально установленными на основании двигателями вращательного движения, осуществляющими движение конечного звена в плоскости, параллельной основанию, и его поворот вокруг вертикальной оси. Вертикальное перемещение конечного звена осуществляется вертикально установленным на основании двигателем поступательного движения, сопряженным с звеньями шарнирных параллелограммов пантографных механизмов через горизонтально расположенные штанги и связанные с ними вертикальные звенья, имеющие возможность только вертикального перемещения.
Недостатком данного устройства является то, что в нем отсутствует полная развязка между степенями свободы. Передача движения со стороны двигателей для осуществления перемещений конечного звена в горизонтальной плоскости обусловливает взаимную связанность этих двигателей, например, вращение конечного звена вокруг вертикальной оси требует согласованного перемещения всех этих двигателей. Это повышает сложность управления и снижает надежность устройства.
Технический результат - устранение отмеченных недостатков и повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве по четырем координатам на базе кинематической развязки всех возможных движений.
Технический результат достигается тем, что в известном устройстве - пространственном механизме, включающем основание, конечное звено, вертикально установленный на основании двигатель вращательного перемещения, сопряженный с вертикально установленным двигателем поступательного перемещения одной из кинематических цепей, сопряженным через начальное звено с шарнирным параллелограммом, который шарнирно связан с конечным звеном, вторая и третья кинематические цепи содержат двигатель, сопряженный с начальным звеном, связанным с конечным звеном посредством четырех шарниров, три из которых установлены горизонтально и перпендикулярно оси соответствующего двигателя, а один шарнир установлен вертикально и сопряжен с конечным звеном, новым является то, что в кинематическую цепь, содержащую двигатель вращательного перемещения и двигатель поступательного перемещения, шарнирный параллелограмм, установленный горизонтально и жестко сопряженный своим начальным звеном с двигателем поступательного перемещения, включен второй шарнирный параллелограммом, входное звено которого является выходным звеном первого шарнирного параллелограмма, а выходное звено второго параллелограмма жестко сопряжено с конечным звеном механизма, во второй и третьей кинематических цепях двигатели выполнены в виде двигателей поступательного перемещения, установленных горизонтально с взаимно перпендикулярными осями, а вертикально установленные шарниры второй и третьей кинематических цепей имеют общую ось.
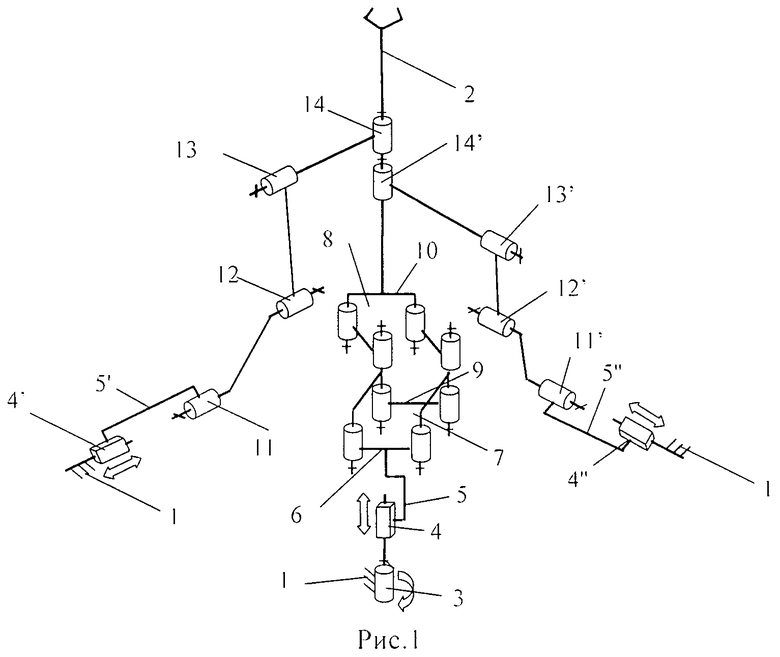
Устройство - пространственный механизм (Рис.1) включает основание 1, конечное звено 2, вертикально установленный двигатель вращательного перемещения 3 одной из кинематических цепей, сопряженный с вертикально установленным двигателем поступательного перемещения 4, жестко сопряженным через начальное звено 5 с входным звеном 6 шарнирного параллелограмма 7. Шарнирный параллелограмм 7 установлен горизонтально. Данная кинематическая цепь снабжена вторым шарнирным параллелограммом 8, входное звено 9 которого является выходным звеном первого шарнирного параллелограмма 7, а выходное звено 10 жестко сопряжено с конечным звеном 2 механизма. Вторая и третья кинематические цепи содержат двигатели поступательного перемещения 4', 4'', сопряженные с соответствующими начальными звеньями 5', 5'', связанными с конечным звеном 2 посредством четырех шарниров соответственно 11, 12, 13, 14 и 11', 12', 13', 14'. Шарниры 11, 12, 13 и 11', 12', 13' установлены горизонтально и параллельно оси соответствующего двигателя, а шарниры 14 и 14' установлены вертикально и сопряжены с конечным звеном 2. Двигатели 4' и 4'' установлены горизонтально с взаимно перпендикулярными осями, а вертикально установленные шарниры 14 и 14' второй и третьей кинематических цепей расположены на одной оси. Устройство - пространственный механизм - работает следующим образом. Относительно основания 1 конечное звено 2 перемещается поступательно вертикально посредством вертикально установленного двигателя поступательного перемещения 4, вращение вокруг вертикальной оси происходит посредством вертикально установленного двигателя вращательного перемещения 3, эти движения передаются через начальное звено 5 на жестко сопряженное с ним входное звено 6 горизонтально установленного шарнирного параллелограмма 7, затем движение передается на второй шарнирный параллелограмм 8, входное звено 9 которого является выходным звеном первого шарнирного параллелограмма 7, после этого с выходного звена 10 второго шарнирного параллелограмма 8 движение передается на конечное звено 2 механизма, во второй и третьей кинематических цепях двигатели поступательного перемещения 4' и 4'', установленные горизонтально с взаимно перпендикулярными осями, передают движение соответствующим начальным звеньям 5'и 5'', затем движение передается последовательно на четыре шарнира соответственно 11, 12, 13, 14 и 11', 12', 13', 14', а затем на конечное звено 2. Поскольку шарниры 11, 12, 13 и 11', 12', 13' установлены горизонтально и перпендикулярно оси соответствующего двигателя, то при работе двигателя 4' есть движение в шарнирах 11', 12', 13', а при работе двигателя 4'' есть движение в шарнирах 11, 12, 13. При этом имеет место передаточное отношение, равное единице. Поскольку шарниры 14 и 14' имеют общую вертикальную ось и сопряжены с конечным звеном 2, то вращение двигателя 3 передается через шарнирные параллелограммы 7 и 8 на конечное звено 2 с передаточным отношением, равным единице. Тем самым осуществлена кинематическая развязка степеней свободы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ И КИНЕМАТИЧЕСКОЙ РАЗВЯЗКОЙ | 2010 |
|
RU2455147C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2009 |
|
RU2412798C2 |
| РОБОТОТЕХНИЧЕСКАЯ УСТАНОВКА ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ | 2009 |
|
RU2415744C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403141C2 |
| МОДУЛЬНАЯ РОБОТОТЕХНИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ УСТАНОВКА | 2011 |
|
RU2478464C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ШЕСТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2536735C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ЧЕТЫРЬМЯ СТЕПЕНЯМИ СВОБОДЫ | 2013 |
|
RU2534706C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2008 |
|
RU2403140C2 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ | 2013 |
|
RU2530111C1 |
| ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ С ПЯТЬЮ СТЕПЕНЯМИ СВОБОДЫ | 2011 |
|
RU2466014C1 |
Изобретение относится к области машиностроения, в частности к пространственным манипуляционным механизмам роботов с четырьмя степенями свободы с кинематической развязкой. Пространственный механизм содержит кинематическую цепь с двигателями вращательного и вертикального перемещений и шарнирный параллелограмм, установленный горизонтально. Входное звено упомянутого параллелограмма жестко сопряжено с начальным звеном кинематической цепи. Имеется второй шарнирный параллелограмм, входное звено которого является выходным звеном первого шарнирного параллелограмма, а его выходное звено жестко сопряжено с конечным звеном механизма. Во второй и третьей кинематических цепях двигатели выполнены в виде двигателей поступательного перемещения, установленных горизонтально с взаимно перпендикулярными осями. Вертикально установленные шарниры второй и третьей кинематических цепей имеют общую ось. Обеспечивается повышение технической и эксплуатационной эффективности устройств манипулирования в пространстве. 1 ил.
Пространственный механизм, включающий основание, конечное звено, вертикально установленный двигатель вращательного перемещения, сопряженный с вертикально установленным двигателем поступательного перемещения одной из кинематических цепей, сопряженным через начальное звено с шарнирным параллелограммом, который шарнирно связан с конечным звеном, причем вторая и третья кинематические цепи содержат двигатели, сопряженные с соответствующим начальным звеном, связанным с конечным звеном посредством четырех шарниров, три из которых установлены горизонтально и перпендикулярно оси соответствующего двигателя, а один шарнир установлен вертикально и сопряжен с конечным звеном, отличающийся тем, что в кинематической цепи, содержащей двигатель поступательного перемещения и двигатель вращательного перемещения, шарнирный параллелограмм установлен горизонтально и его входное звено жестко сопряжено с соответствующим начальным звеном кинематической цепи, причем упомянутая кинематическая цепь снабжена вторым шарнирным параллелограммом, входное звено которого является одновременно выходным звеном первого шарнирного параллелограмма, а выходное звено второго параллелограмма жестко сопряжено с конечным звеном механизма, при этом во второй и третьей кинематических цепях двигатели выполнены в виде двигателей поступательного перемещения, установленных горизонтально со взаимно перпендикулярными осями, а вертикально установленные шарниры второй и третьей кинематических цепей имеют общую ось.
| WO 2006021629 A1, 02.03.2006 | |||
| US 4976582 A, 11.12.1990 | |||
| СПОСОБ УПРАВЛЕНИЯ ДВУХКООРДИНАТНЫМ ПЯТИЗВЕННЫМ МАНИПУЛЯТОРОМ | 2004 |
|
RU2288091C2 |
| ПРОСТРАНСТВЕННЫЙ РЕГУЛИРУЕМЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ РОБОТА | 2003 |
|
RU2245241C2 |
| US 20040091348 A1, 13.05.2004. | |||

