Заявляемое устройство относится к области машиностроения и может применяться в радиальных и радиально-осевых опорах шпиндельных узлов металлообрабатывающих станков.
Известна гидростатическая опора [а.с. СССР №1784772], содержащая корпус, в котором на упругом подвесе в виде колец, соединенных перегородками, установлена подвижная втулка, охватывающая цапфу с рабочим зазором, а на внутренней поверхности - несущие карманы, питаемые от источника подачи смазки под давлением через входные дроссели, а также управляющие камеры между корпусом и втулкой, ограниченные упругими кольцами и упругими перегородками, и выполненные во втулке каналы для соединения управляющих камер с несущими карманами, имеются дополнительно входные дроссели, питающие управляющие камеры от источника давления смазки, а дроссели, соединяющие управляющие камеры с несущими карманами, выполнены в виде щелей, образованных поверхностями скольжения втулки и цапфы вала.
Недостатками опоры, ограничивающими ее нагрузочную способность, являются пассивное нагнетание рабочей жидкости через неуправляемые дроссели, отсутствие угловой самоустановки подвижной втулки при перекосе вала, а также невозможность осевого нагружения.
Известна гидростатическая опора [а.с. СССР №1691609], содержащая корпус, в котором на упругом подвесе установлена подвижная втулка, охватывающая вал с рабочим зазором и имеющая на внутренней поверхности несущие карманы; между корпусом и втулкой расположены непроточные управляющие камеры, имеющие входные дроссели, при этом каждый несущий карман сообщается с отдельной управляющей камерой через демпфирующий дроссель и питается от источника нагнетания рабочей жидкости через отдельный входной дроссель. На внутренней поверхности корпуса для увеличения объема управляющих камер выполнены дополнительные карманы.
Недостатками указанного решения являются отсутствие самоустановки втулки и активного нагнетания рабочей жидкости, а также дополнительные потери мощности на ее дросселирование.
Наиболее близким техническим решением, выбранным за прототип, является газостатический подшипник [пат. US №3960414, также опубл. как DE №2460237, PL № 83700, SU №645614, GB №1467911], содержащий корпус и втулку, установленную в корпусе на эластичных кольцах и имеющую на наружной поверхности кольцевые пояски, образующие дросселирующие щелевые зазоры с внутренней поверхностью корпуса; между корпусом и втулкой образованы управляющие камеры, связанные соединительными каналами с ее внутренней поверхностью, охватывающей вал.
Недостатками подшипника являются пониженная нагрузочная способность из-за отсутствия несущих карманов на внутренней поверхности втулки и ее угловой самоустановки при перекосе вала, а также невозможность осевого нагружения.
Техническим результатом изобретения является повышение радиальной и осевой нагрузочной способности, а также обеспечение угловой самоустановки втулки и отрицательной податливости подшипника в радиальном и осевом направлении.
Технически результат достигается тем, что в гидростатическом подшипнике, содержащем корпус, вал и подвижную втулку, установленную в корпусе на эластичной оболочке с вырезами, которые образуют между корпусом и втулкой управляющие камеры, соединенные каналами с несущим слоем, образованным между валом и втулкой, новым является то, что на внутренней поверхности втулки выполнены несущие карманы, а в каждой управляющей камере между поверхностями корпуса и втулки образован дросселирующий щелевой зазор, который связан соединительными каналами на входе - с источником нагнетания рабочей жидкости, а на выходе через соединительные каналы - с несущими карманами.
Угловая самоустановка втулки обеспечивается тем, что как управляющие камеры, так и несущие карманы расположены в два кольцевых ряда, причем управляющие камеры имеют осевое смещение относительно несущих карманов.
Для обеспечения устойчивости при отрицательной податливости подшипника соединительные каналы между управляющими камерами и несущими карманами выполнены слабо дросселирующими и расположены перекрестно, так чтобы каждая камера была соединена с карманом из дальнего кольцевого ряда.
Для обеспечения отрицательной податливости подшипника в осевом направлении предложен радиально-осевой подшипник, в котором сопряженные поверхности корпуса, вала и втулки имеют коническую форму.
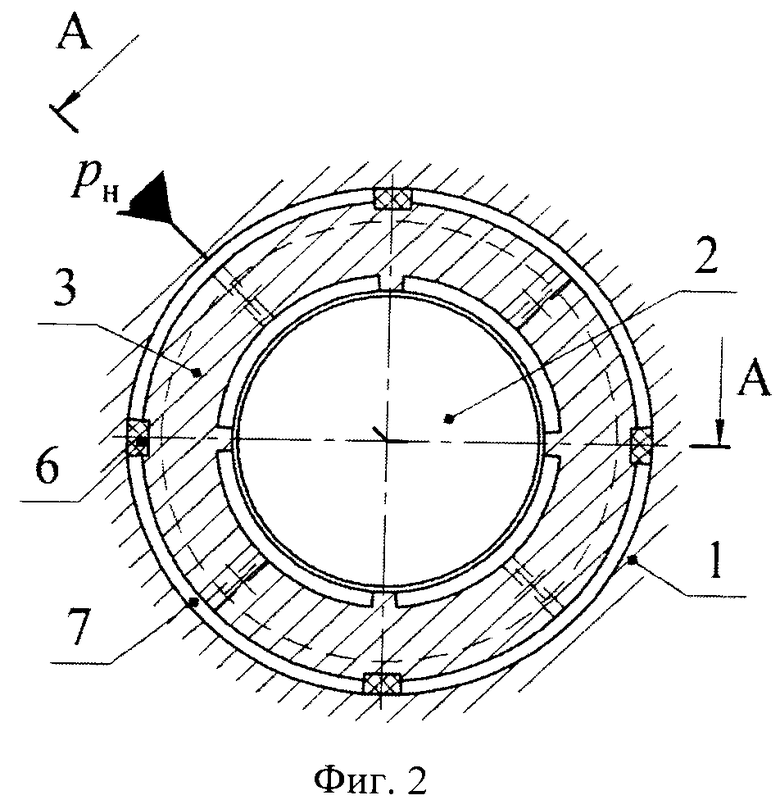
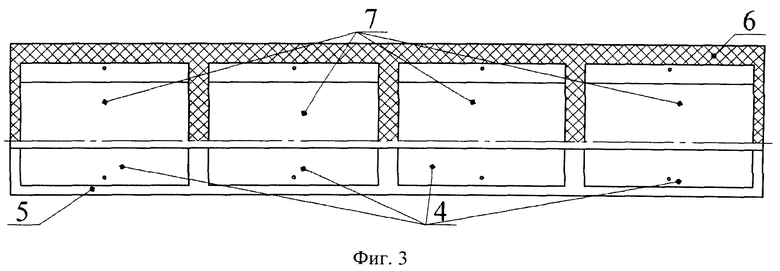
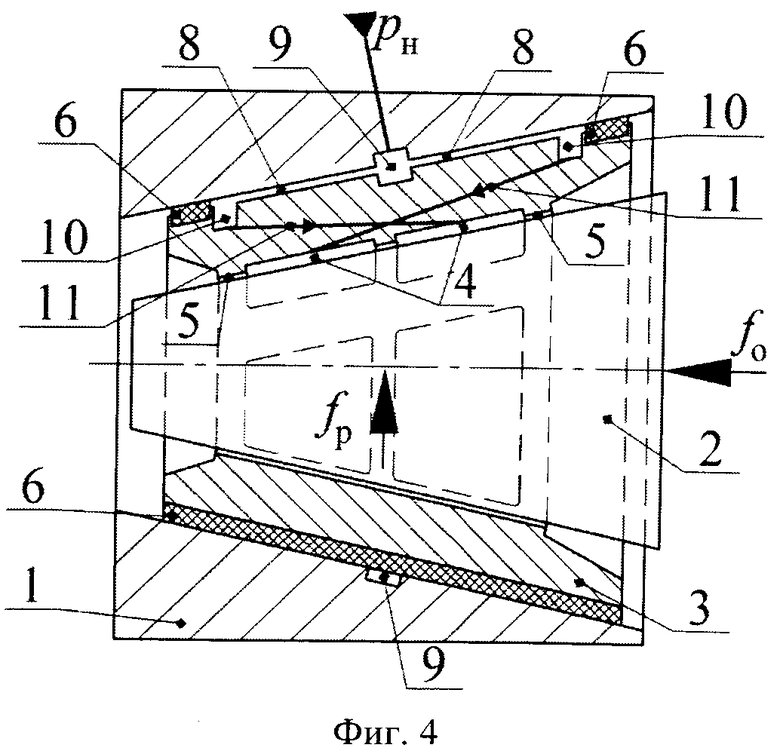
Сущность изобретения поясняется чертежами: на фиг.1 и 2 показаны соответственно продольный и поперечный разрез радиального гидростатического подшипника, а на фиг.3 - его совмещенная развертка по управляющим камерам (выше осевой линии) и по несущим карманам (ниже осевой линии). На фиг.4 показан продольный разрез радиально-осевого гидростатического подшипника.
Гидростатический подшипник (фиг.1, 2, 3) состоит из корпуса 1, вала 2 и подвижной втулки 3, на внутренней поверхности которой выполнены несущие карманы 4, расположенные в два кольцевых ряда. Втулка 3 охватывает вал 2 с дросселирующим щелевым зазором 5 и установлена в корпусе 1 на эластичной оболочке 6 с вырезами, которые образуют между корпусом и подвижной втулкой управляющие камеры 7, расположенные в два кольцевых ряда. Внутри управляющих камер 7 между сопряженными поверхностями корпуса и втулки образованы дросселирующие щелевые зазоры 8, каждый из которых на входе через кольцевую канавку 9 связан с источником нагнетания рабочей жидкости (не показан), а на выходе через сегментные канавки 10 по соединительным каналам 11 - с несущими карманами 4; причем каналы 11 выполнены перекрестно, так чтобы каждая камера 7 была соединена с карманом 4 из дальнего кольцевого ряда.
При работе подшипника рабочая жидкость нагнетается в кольцевую канавку 9 и через дросселирующие щелевые зазоры 8 попадает в сегментные канавки 10, и по соединительным каналам 11 она поступает в несущие карманы 4 и далее через дросселирующие щелевые зазоры 5 - в сливной коллектор (не показан). Действующая на вал 2 радиальная нагрузка f вызывает его первичное смещение в зазоре 5 по направлению нагрузки. При этом давление в нагружаемых (разгружаемых) несущих карманах 4 и связанных с ними управляющих камерах 7 увеличивается (уменьшается). Если создаваемые гидравлическим давлением силы, действующие на наружную поверхность втулки 3, больше сил, действующих на ее внутреннюю поверхность, происходит смещение втулки 3 противоположно направлению нагрузки. При этом дросселирующие щелевые зазоры 8, расположенные в нагружаемой (разгружаемой) зоне подшипника, увеличиваются (уменьшаются) и происходит дополнительное увеличение (уменьшение) нагнетания рабочей жидкости в несущие карманы 4, расположенные в нагружаемой (разгружаемой) зоне. Сохраняя силовое равновесие, вал 2 вторично смещается в дросселирующем щелевом зазоре 5, но уже противоположно направлению нагрузки f. При оптимальном выборе геометрических параметров вторичное смещение вала 2 будет больше первичного (по модулю) и нагрузочная характеристика подшипника будет иметь диапазон с отрицательной податливостью.
Для обеспечения динамической устойчивости подшипника при отрицательной податливости каналы 11 выполнены слабо дросселирующими и выполняют роль динамических демпферов.
При перекосе консольно нагруженного вала 2 разность давлений в левом и правом ряду управляющих камер 7 и несущих карманов 4 обеспечивает угловую самоустановку втулки 3 относительно оси вала в пределах дросселирующего щелевого зазора 8, благодаря перекрестной связи управляющих камер 7 и несущих карманов 4. Это позволяет увеличить допустимый радиальный эксцентриситет вала 2 в зазоре 5 и повысить нагрузочную способность подшипника. Увеличить угловую самоустановку втулки 3 при перекосе вала 2 позволяет осевое смещение управляющих камер 7 относительно несущих карманов 4 в направлении от консольной нагрузки.
Радиально-осевой гидростатический подшипник (фиг.4) имеет коническую форму сопряженных поверхностей корпуса 1, вала 2 и втулки 3, что обеспечивает ему малую, нулевую или отрицательную податливость в радиальном и осевом направлениях.
При нагружении вала 2 радиальной силой fр предложенный гидростатический подшипник работает аналогично показанному на фиг.1 и 2. При нагружении вала 2 осевой силой fo происходит его первичное смещение в направлении нагрузки и повышается давление рабочей жидкости во всех несущих карманах 4 и в связанных с ними управляющих камерах 7. Если эффективная площадь управляющих камер 7 больше эффективной площади несущих карманов 4, нарушается силовое равновесие втулки 3 и она смещается в осевом направлении противоположно силе fo и увеличивает дросселирующие щелевые зазоры 8 управляющих камер 7. В результате происходит дополнительное нагнетание рабочей жидкости в несущие карманы 4, под действием которого вал 2 вторично смещается в осевом направлении, но уже противоположно осевой нагрузке. При этом обеспечивается диапазон отрицательной податливости в осевом направлении.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2001 |
|
RU2211385C2 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2017 |
|
RU2654453C1 |
| Радиально-упорная гидростатическая опора | 1989 |
|
SU1668763A1 |
| ГИДРОСТАТИЧЕСКАЯ ОПОРА | 1989 |
|
SU1826646A1 |
| Гидростатический подшипник | 1987 |
|
SU1530853A1 |
| Гидростатическая опора | 1991 |
|
SU1784772A1 |
| РЕГУЛЯТОР ДЛЯ ГИДРОСТАТИЧЕСКИХ ОПОР | 2011 |
|
RU2487280C1 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2003 |
|
RU2262622C2 |
| ГИДРОСТАТИЧЕСКАЯ ОПОРА | 2009 |
|
RU2406891C1 |
| ШПИНДЕЛЬНЫЙ УЗЕЛ | 2015 |
|
RU2621524C2 |
Изобретение относится к области машиностроения и может применяться в радиальных и радиально-осевых опорах шпиндельных узлов металлообрабатывающих станков и имеет повышенную нагрузочную характеристику с диапазоном отрицательной податливости. Подшипник содержит корпус, вал и втулку, имеющую на внутренней поверхности два кольцевых ряда несущих карманов и установленную в корпусе на эластичной оболочке с вырезами, которые образуют между корпусом и втулкой два кольцевых ряда управляющих камер. В каждой камере между поверхностями корпуса и подвижной втулки образован дросселирующий щелевой зазор, соединенный каналами на входе - с гидростанцией, а на выходе - с несущим карманом, расположенным в другом кольцевом ряду. Управляющие камеры имеют осевое смещение относительно несущих карманов. Соединительные каналы, связывающие управляющие камеры с несущими карманами, выполнены слабо дросселирующими. В радиально-осевом подшипнике сопряженные поверхности корпуса, вала и втулки выполнены коническими. Технический результат: повышение радиальной и осевой нагрузочной способности подшипника, а также обеспечение угловой самоустановки втулки и отрицательной податливости подшипника в радиальном и осевом направлении. 2 з.п. ф-лы, 4 ил.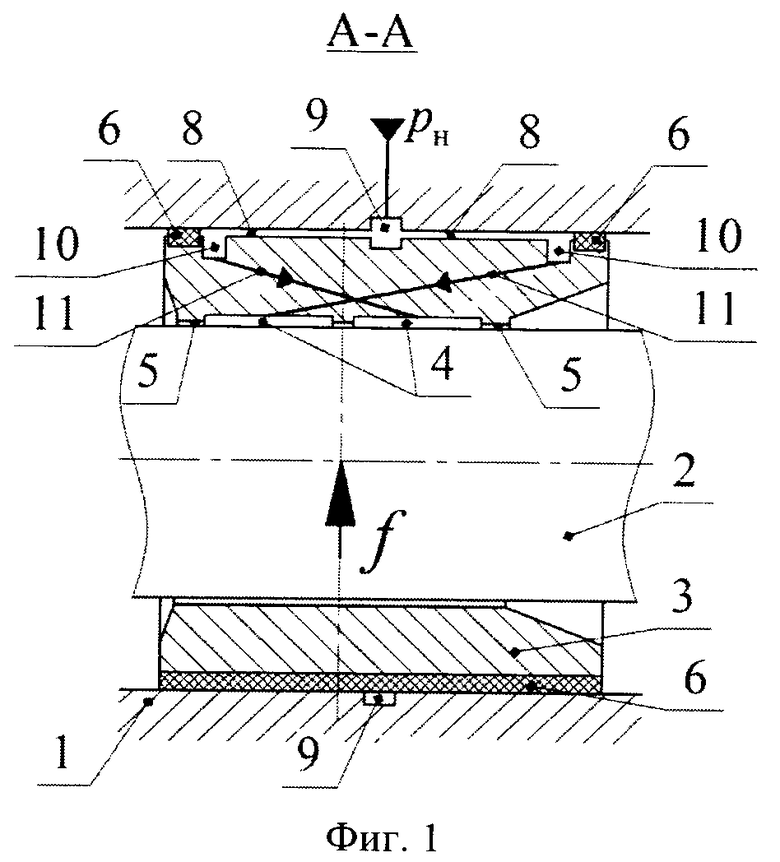
1. Гидростатический подшипник, содержащий корпус, вал и подвижную втулку, установленную в корпусе на эластичной оболочке с вырезами, которые образуют между корпусом и втулкой управляющие камеры, соединенные каналами с несущим слоем, образованным между валом и втулкой, отличающийся тем, что на внутренней поверхности втулки выполнены несущие карманы, а в каждой управляющей камере образован дросселирующий щелевой зазор, который связан соединительными каналами на входе - с источником нагнетания рабочей жидкости, а на выходе через соединительные каналы - с несущими карманами, при этом как управляющие камеры, так и несущие карманы расположены в два кольцевых ряда, с осевым смещением камер относительно карманов.
2. Гидростатический подшипник по п.1, отличающийся тем, что соединительные каналы, связывающие управляющие камеры с несущими карманами, выполнены слабо дросселирующими и расположены перекрестно, так чтобы каждая камера была соединена с карманом из дальнего кольцевого ряда.
3. Гидростатический подшипник по п.1 или 2, отличающийся тем, что сопряженные поверхности корпуса, вала и втулки выполнены коническими.
| Газовый пошипник | 1974 |
|
SU645614A3 |
| Гидростатическая опора | 1989 |
|
SU1691609A1 |
| Гидростатическая опора | 1991 |
|
SU1784772A1 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2010 |
|
RU2453739C1 |
| US 5193915 A, 16.03.1993 | |||

