Изобретение относится к машиностро- ению и может быть использовано в шпиндельных узлах металлорежущих станков с гидро- и аэростатическими подшипниками. Целью изобретения является улучшение нагрузочнй способности подшипника путем достижения отрицательной осевой податливости.
На фиг. 1 показана гидростатическая опора с упругими элементами регулятора в виде фигурных плоских пружин, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - гидростатическая опора с упругими элементами регулятора в виде эластичных прокладок; на фиг. 4 - разрез Б-Б на фиг. 3.
8 корпусе 1 неподвижно установлена втулка 2, охватывающая с рабочим зазором цапфу вала 3 с упорным буртом. На внутренней поверхности втулки 2 выполнены радиальные несущие камеры 4, воспринимающие радиальную нагрузку, а на торце со стороны бурта - осевые несущие камеры 5, воспринимающие осевую нагрузку. На наружной поверхности втулки 2 выполнены управляющие карманы 6, ограниченных с обеих сторон кольцевыми по- ясками 7, каждый из которых сообщается с одним из несущих камер 4 и 5 соединительными каналами 8. Втулку 2 охватывает подвижный кольцевой регулятор 9 расхода смазки, упруго соединенный с неподвиж- ным Фланцем 10 плоскими фигурными npyj жинами 11, которые позволяют регулятору 9 перемещаться в радиальном, осевом и угловом направлениях в пределах входных щелевых дросселей 12, образованных сопряженными коническими поверхностями регулятора 9 и кольцевых поясков 7 управляющих карманов 6. Фигурные плоские пружины 11 могут быть выполнены Z-образ- ной формы.
Радиально-упорная гидростатическая опора, изображенная на фиг. 3, состоит из корпуса 1, установленной в нем втулки 2, охватывающей с рабочим зазором коническую цапфу вала 3. На внутренней поверхности втулки 2 выполнены несущие камеры 4, воспринимающие осевые и радиальные нагрузки. На наружной поверхности втулки 2 с помощью эластичных прокладок 13 установлен кольцевой регулятор 9, имеющий коническую наружную поверхность, на которой выполнены управляющие карманы 6, связанные с несущими камерами 4 каналами 8, проходящими через эластичные прокладки 13. Входные щелевые дроссели 12 образованы наружной поверхностью регулятора 9 и внутренней конической поверхностью корпуса 1.
Опора работает следующим образом (фиг. 1).
Смазка, нагнетаемая источником давления Рн (не показан), через входные щелевые дроссели 12 поступает в управляющие карманы 6, а из них по каналам 8 попадает в несущие камеры 4 и 5.
При действии на цапфу вала 3 радиальной нагрузки fp увеличивается давление в нагруженных и уменьшается в разгруженных несущих камерах 4 и управляющих карманах 6. Это приводит к упругому смещению кольцевого регулятора 9 преимущественно в радиальном направлении. Зазор входного щелевого дросселя 12 в зоне нагруженной камеры увеличивается, в зоне разгруженной - уменьшается. Это обеспечивает дополнительное поступление смазки в нагруженную камеру, а в разгруженной камере поток смазки уменьшается. При действии на цапфу вала 3 осевой нагрузки foe давление возрастает на одинаковую величину во всех несущих камерах 5 и связанных с
ними управляющих карманах 6. Появляющаяся при этом дополнительная составляющая гидростатических сил давления на внутреннюю коническую поверхность подвижного кольцевого регулятора 9 выэы- вает его осевое смещение, что приводит к увеличению зазора входных щелевых дросселей 12. Приток смазки во все несущие камеры увеличивается на одинаковую величину. Это изменение приводит к перемещению цапфы вала в осевом направлении, навстречу действующей нагрузке.
Принцип работы гидростатической опоры по фиг. 3 отличается тем, что и осевую, и радиальную нагрузки воспринимают несущие камеры 4, выполненные на конической внутренней поверхности втулки 2 опоры. При действии на цапфу вала 3 радиальной нагрузки появляется разность давлений в оппозитных несущих камерах 4 и управляющих карманах 6. Регулятор 9 при этом перемещается в радиальном и угловом направлениях за счет гидростатических сил давления, действующих на его коническую поверхность. При действии осевой нагруз- ки foe смещение кольцевого регулятора 9 происходит только в осевом направлении, так как радиальные составляющие гидростатических сил уравновешиваются, а осевые составляющие направлены одинаково.
Выполнение поверхностей, образующих щелевые дроссели, коническими позволяет изменять поступление смазки в карманы опоры не только за счет ради- ального, но также осевого и углового перемещений кольцевого регулятора, в зависимости от характера нагружения (радиальная, осевая или моментная нагрузка). Выполнение упругих элементов регулятора в виде фигурных плоских пружин или эластичных прокладок позволяет осуществлять перемещение подвижного кольцевого регулятора по пяти степеням свободы (два радиальных, два угловых и одно осевое перемещение). Совокупность
этих двух признаков позволяет достичь радиальной, угловой и осевой отрицательной податливости опоры, величина каждой из которых зависит от соотношения осевой и радиальной податливости упругих элементов, а также от конусности сопряженных поверхностей, образующих щелевые дроссели. Причем, величина отрицательной радиальной и угловой податливости опоры увеличивается за счет сложения радиального и углового перемещения регулятора.
Формула изобретения
1.Радиально-упорная гидростатическая опора, содержащая цапфу вала, корпус и установленную в нем концентрично втулку с несущими камерами, а также размещенный на упруго радиальных элементах подвижной кольцевой регулятор и входные щелевые дроссели, сообщающиеся посредством каналов с несущими камерами, о т- личающаяся тем, что с целью улучшения нагрузочных характеристик, подвижной кольцевой регулятор дополнительно снабжен упруго осевыми элементами, при этом поверхности, образующие входные щелевые дроссели, выполнены коническими.
2.Опора по п. 1, отличающаяся тем, что упругие элементы подвижного кольцевого регулятора выполнены в виде фигурных плоских пружин и одна из сопряженных конических поверхностей, образующих входные щелевые дроссели, расположена на втулке в зоне каналов, сообщающих у по- мянутые дроссели с несущими камерами.
3.Опора по п. 2 отличающаяся тем, что фигурные плоские пружины выполнены Z-образной формы.
4.Опора по п. 1, отличающаяся тем, что упругие элементы выполнены в виде конусообразных эластичных кольцевых прокладок, установленных между втулкой и кольцевым регулятором, а одна из сопряженных конических поверхностей, образующих входные щелевые дроссели, расположена в корпусе.
//Я/у//
Фиг. 2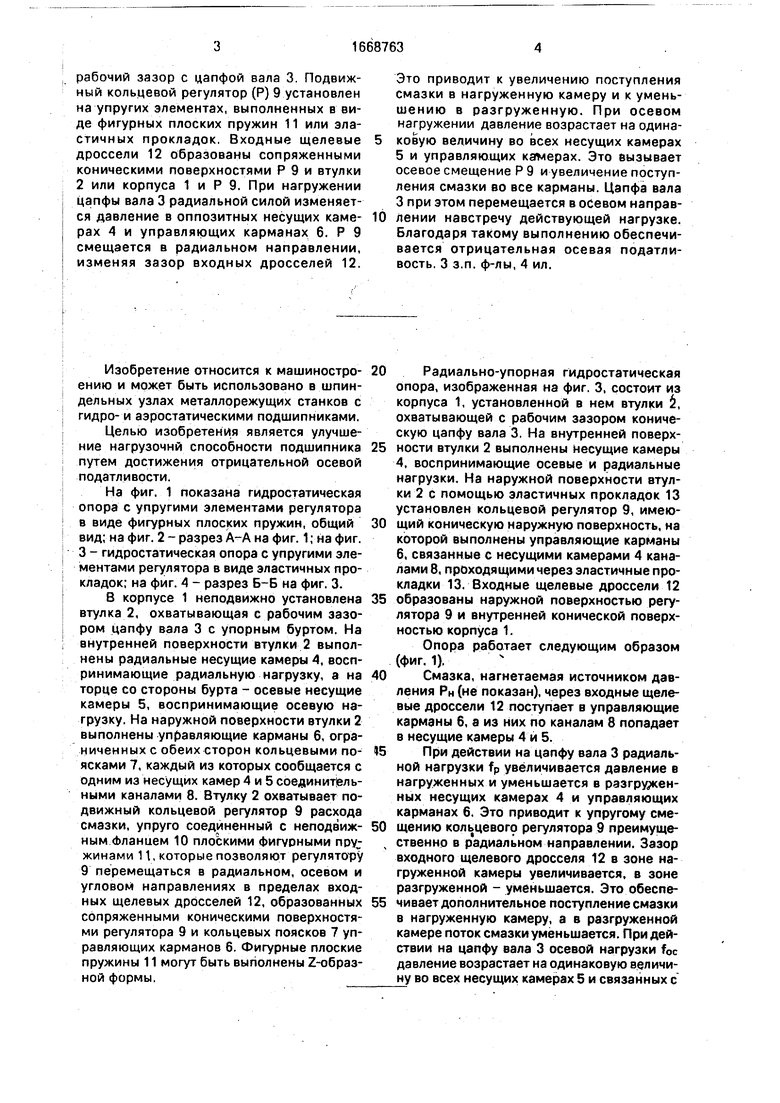

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный подшипник скольжения | 1988 |
|
SU1551860A1 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2013 |
|
RU2537217C2 |
| ГИДРОСТАТИЧЕСКАЯ ОПОРА | 1989 |
|
SU1826646A1 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2005 |
|
RU2280789C1 |
| Гидростатическая опора | 1985 |
|
SU1364785A1 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2001 |
|
RU2211385C2 |
| Опора скольжения | 1989 |
|
SU1705628A1 |
| ГИДРОСТАТИЧЕСКИЙ ПОДШИПНИК | 2017 |
|
RU2654453C1 |
| Гидростатическая опора | 1991 |
|
SU1784772A1 |
| Гидростатическая опора | 1983 |
|
SU1143900A1 |


Изобретение относится к машиностроению и может быть использовано в шпиндельных узлах металлорежущих станков с гидро- или аэростатическими опорами. Цель изобретения - улучшение нагрузочных характеристик. Подшипник скольжения состоит из корпуса 1, установленной в нем втулки 2 с несущими камерами 4 и 5, образующей рабочий зазор с цапфой вала 3. Подвижный кольцевой регулятор (Р) 9 установлен на упругих элементах, выполненных в виде фигурных плоских пружин 11 или эластичных прокладок. Входные щелевые дроссели 12 образованы сопряженными коническими поверхностями Р 9 и втулки 2 или корпуса 1 и Р 9. При нагружении цапфы вала 3 радиальной силой изменяется давление в оппозитных несущих камерах 4 и управляющих карманах 6. Р 9 смещается в радиальном направлении, изменяя зазор входных дросселей 12. Это приводит к увеличению поступления смазки в нагруженную камеру и к уменьшению в разгруженную. При осевом нагружении давление возрастает на одинаковую величину во всех несущих камерах 5 и управляющих камерах. Это вызывает осевое смещение Р 9 и увеличение поступления смазки во все карманы. Цапфа вала 3 при этом перемещается в осевом направлении навстречу действующей нагрузке. Благодаря такому выполнению обеспечивается отрицательная осевая податливость. 3 з.п.ф-лы, 4 ил.
П 0ujL
7Ш
//// ///ЛЛ//;////
2 I/
/
В-Б ,8 б
Я
ФигЛ
| Гидростатический подшипник | 1987 |
|
SU1530853A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
