Изобретение относится к устройствам для создания силы тяги и/или ее повышения на транспортных средствах и предназначено для установки на транспортных средствах, работающих преимущественно под водой, в атмосфере и в космосе.
Из уровня техники известно устройство, реализующее способ создания тяги внутри замкнутой системы, содержащее замкнутый объем со средством нагнетания рабочего тела, образующим циркуляционный контур, внутри которого помещены два текучих вещества, где более тяжелое текучее вещество вплотную примыкает к опорной стенке замкнутого объема, а другое текучее вещество - рабочее - располагается сверху тяжелого текучего вещества. Для всасывания рабочей текучей жидкости из замкнутого объема и нагнетания его в камеру высокого давления применяется насос. Нагнетание осуществляется через сопло, сообщенное с камерой высокого давления и с замкнутым объемом (см. заявку на изобретение №98103193, опубликована 27.12.1998).
Принцип создания тяги в замкнутом объеме с помощью данного устройства полностью описан в заявке, однако недостатками данного решения является то, что тяга создается лишь в одном направлении, необходимость применения текучих веществ разной вязкости, в связи с чем необходимо проводить расчеты и подбор жидкостей с необходимой вязкостью, которые бы обеспечивали должный эффект создания тяги, образование вихрей на выходе рабочей жидкости из сопла, что приводит к смешению жидкостей и образованию суспензии и уменьшению КПД.
Техническим результатом изобретения является обеспечение возможности создания тяги в любом направлении, улучшение маневренности транспортного средства, работающего в таких средах, как вода, атмосфера и космос, повышение КПД.
Технический результат изобретения достигается благодаря тому, что гидродинамический движитель содержит гидродинамические трубы, оси которых расположены параллельно и концы которых соединены со средством нагнетания рабочего тела с образованием циркуляционного контура, при этом внутри каждой гидродинамической трубы установлено, по меньшей мере, одно крыло с возможностью регулирования угла атаки набегающего потока рабочего тела.
Кроме того, каждая труба связана со средством нагнетания рабочего тела посредством, преимущественно, камер подвода и отвода рабочего тела с возможностью поворота вокруг своей оси.
Кроме того, для регулирования угла атаки набегающего потока рабочего тела каждое крыло может быть связано с устройством регулирования угла атаки и может быть установлено внутри соответствующей трубы шарнирно на оси, закрепленной на стенках соответствующей трубы.
Кроме того, движитель может быть снабжен шарнирным средством крепления к транспортному средству, выполненному с возможностью поворота гидродинамических труб на 180 градусов вокруг оси шарнира.
Изобретение поясняется чертежом, на фигуре которого схематично показан предложенный гидродинамический движитель.
Гидродинамический движитель содержит гидродинамические трубы 1, оси которых расположены параллельно друг относительно друга и концы которых соединены со средством 2 нагнетания рабочего тела с образованием циркуляционного контура. Трубы 1 соединены со средством 2 нагнетания посредством камеры 3 подвода и камеры 4 отвода рабочего тела, которые сообщены с соответствующих концов труб 1 с их полостями. Камеры 3 и 4 подвода и отвода рабочего тела соответственно представляют собой гидродинамические системы, которые могут быть выполнены в виде емкости, имеющей определенную форму, или в виде трубы, или в виде иного резервуара, при этом камеры 3 и 4 имеют полости, образованные, например, перегородками, расположенными таким образом, что образуется система каналов 5 для подачи рабочего тела в соответствующую трубу 1. Торцы каждой трубы 1 соединены с камерами 3 и 4 таким образом, что полость каждой трубы 1 сообщена с соответствующими полостями соответствующих каналов 5 камер 3 и 4. Кроме того, каждая труба 1 связана с камерами 3 и 4 с возможностью вращения вокруг своей оси. Вращение осуществляется за счет шарнирного соединения труб 1 с камерами 3 и 4 (их корпусом), например, с помощью установки на подшипники или с использованием других элементов вращения. Оси труб 1 расположены параллельно друг относительно друга, преимущественно в один ряд, однако движитель может иметь и несколько рядов труб 1, оси которых расположены параллельно. Внутри каждой трубы 1 на осях 6 шарнирно установлены крылья 7, при этом каждая ось 6 закреплена на соответствующих противоположных стенках соответствующей трубы 1. Каждая труба 1 имеет, преимущественно, прямоугольную (квадратную) форму поперечного сечения. Однако трубы 1 могут иметь и другую форму поперечного сечения, обеспечивающую свободное отклонение крыльев 7 внутри труб 1, создавая необходимый угол атаки набегающего потока рабочего тела (оптимальный угол атаки 20°). В качестве рабочего тела может использоваться как жидкость (например, антифриз), так и газ.
Отклонения (регулирование угла атаки) крыльев 7 осуществляются посредством устройства регулирования угла атаки (не показано), которое может быть выполнено как механическим (например, система рычагов и т.п.), так и электронным.
Гидродинамические камеры 3 и 4 соответственно подвода и отвода рабочего тела связаны посредством соответственно входного и выходного патрубков 8 и 9 со средством 2 нагнетания рабочего тела, выполненным, например, в виде насоса (компрессора), снабженного либо крыльчаткой, либо шнеком (для создания наибольшего давления в системе), либо другим элементом нагнетания рабочего тела (создания давления внутри замкнутого контура. Патрубки 8 и 9 могут быть выполнены как гибкими, так и жесткими.
Гидродинамический движитель содержит расширительный бачок 10, предназначенный для заливки жидкости (рабочего тела) и поддержания давления в системе при помощи воздушного крана 11, связанного с источником давления, например, компрессором (не показан). При этом средство 2 нагнетания рабочего тела можно сделать менее мощным за счет использования расширительного бачка, поскольку в системе создается требуемое давление.
В качестве источника энергии для работы средства 2 для нагнетания рабочего тела, как вариант, может использоваться парогенератор 12, связанный с ядерным реактором 13.
Гидродинамический движитель снабжен шарнирным средством 14 крепления к транспортному средству (например, шаровая цапфа), посредством которого осуществляется крепление движителя к транспортному средству, а также возможность изменения направления движения транспортного средства путем изменения наклона движителя относительно него (путем поворота вокруг оси шарнира). Управление транспортным средством также можно осуществлять путем наклона крыльев 7 при помощи устройства регулирования угла атаки, а также поворота труб 1 вокруг своей оси.
Гидродинамический движитель с его гидродинамическими трубами 1 и камерами 3 и 4 подвода и отвода рабочего тела, как вариант, из соображений компактности может быть выполнен в виде радиатора.
Работает гидродинамический движитель следующим образом.
При включении средства 2 нагнетания рабочего тела (насоса) жидкость (рабочее тело) под большим давлением перемещается по входному патрубку 9 в камеру 3 подвода рабочего тела, откуда по соответствующим каналам 5 напором (под большим давлением) попадает в соответствующие гидродинамические трубы 1. В данных трубах 1 жидкость обтекает многочисленные крылья 7, которые создают подъемную силу Fп за счет разницы скоростей обтекания их поверхностей (подъемная сила действует на крылья 7, передавая ее на соответствующие стенки трубы 1, на которых закреплены крылья 7). Далее жидкость попадает в камеру 4 отвода рабочего тела и по системе каналов 5 через патрубок 9 попадает обратно в средство 2 нагнетания рабочего тела. Далее цикл повторяется с последующим использованием этой же жидкости. Поворачивая движитель при помощи средства 14 на 180°, можно быстро погружать транспортное средство под воду, даже имея положительную плавучесть, не применяя при этом в конструкции балластные цистерны. Такой же результат можно получить при разворачивании крыльев 7 вокруг оси потока рабочего тела (жидкости), т.е. путем поворота труб 1 вокруг своей оси на 180°.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ | 1990 |
|
RU2025405C1 |
| СПОСОБ СОЗДАНИЯ ДВИЖУЩЕЙ СИЛЫ АППАРАТА В ТЕКУЧЕЙ СРЕДЕ И ДВИЖИТЕЛЬ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2172700C2 |
| Самостабилизирующийся лопастной движитель | 2022 |
|
RU2798298C1 |
| КОЛЬЦЕВОЙ СТАТИЧЕСКИЙ ВЕТРО- И ВОДОДВИЖИТЕЛЬ И УСТРОЙСТВО ВЕТРОЛЕТА, ВОДОЛЕТА И ВОДОХОДА | 1994 |
|
RU2110439C1 |
| РЕАКТИВНЫЙ ДВИЖИТЕЛЬ | 1999 |
|
RU2152332C1 |
| РЕАКТИВНЫЙ ДВИЖИТЕЛЬ | 1997 |
|
RU2122506C1 |
| Парусный движитель транспортного средства | 1985 |
|
SU1303488A1 |
| АКТИВНОЕ ПОДВОДНОЕ КРЫЛО | 1999 |
|
RU2176609C2 |
| Инфразвуковой генератор и устройство для генерирования инфразвуковых волн | 2020 |
|
RU2745000C1 |
| Крыльчатый двигатель | 2020 |
|
RU2743564C1 |
Изобретение относится к устройствам для создания силы тяги и/или ее повышения и предназначено для установки на транспортных средствах, работающих преимущественно под водой, в атмосфере и в космосе. Гидродинамический движитель содержит гидродинамические трубы и крыло. Гидродинамические трубы содержат оси, которые расположены параллельно, а концы соединены со средством нагнетания рабочего тела с образованием циркуляционного контура. Внутри каждой гидродинамической трубы установлено, по меньшей мере, одно крыло с возможностью регулирования угла атаки набегающего потока рабочего тела. Достигается обеспечение возможности создания тяги в любом направлении, улучшение маневренности транспортного средства, повышение КПД. 3 з.п. ф-лы, 1 ил.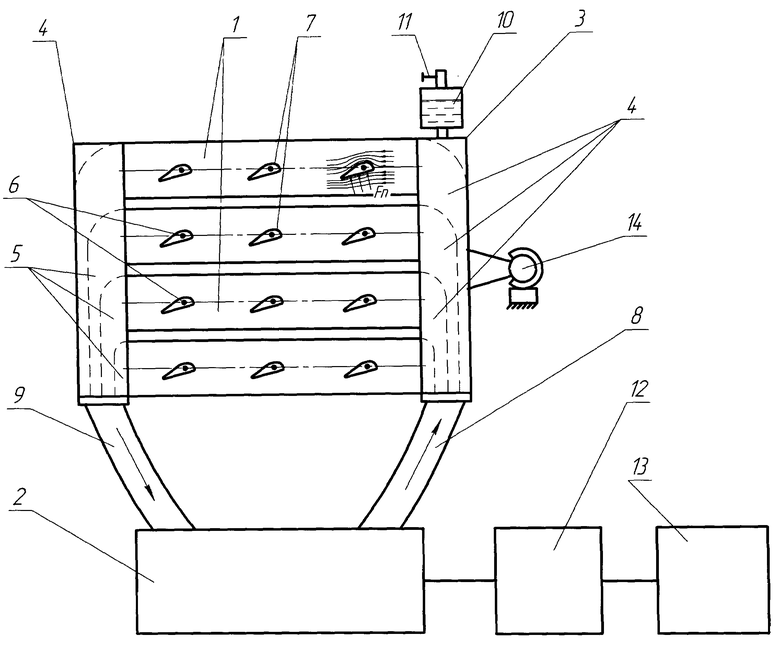
1. Гидродинамический движитель, содержащий гидродинамические трубы, оси которых расположены параллельно, а концы которых соединены со средством нагнетания рабочего тела с образованием циркуляционного контура, при этом внутри каждой гидродинамической трубы установлено, по меньшей мере, одно крыло с возможностью регулирования угла атаки набегающего потока рабочего тела.
2. Движитель по п.1, отличающийся тем, что каждая труба связана со средством нагнетания рабочего тела посредством камер подвода и отвода рабочего тела с возможностью поворота вокруг своей оси.
3. Движитель по п.1, отличающийся тем, что для регулирования угла атаки набегающего потока рабочего тела каждое крыло связано с устройством регулирования угла атаки и установлено внутри соответствующей трубы шарнирно на оси, закрепленной на стенках соответствующей трубы.
4. Движитель по п.1, отличающийся тем, что он снабжен шарнирным средством крепления к транспортному средству, выполненному с возможностью поворота гидродинамических труб на 180 градусов вокруг оси шарнира.
| RU 98103193 A, 27.12.1998 | |||
| Движитель | 1979 |
|
SU852717A1 |
| WO 9856649 A1, 17.12.1998 | |||

