Заявляемое изобретение относится к области измерительной техники и может быть использовано в области гражданского строительства, оффшорного строительства и судостроения, а также для измерения положения в пространстве различных неподвижных объектов.
Из уровня техники известен способ установки объекта в проектное положение при строительстве, описанный в ОСТ 5Р 9613-84 «Корпуса металлические надводных судов. Проверочные работы при изготовлении на построечном месте. Технические требования», согласно которому на построечном месте в соответствии с конструкторской документацией отмечают базовые линии, опираясь на которые, при помощи различных измерительных приспособлений, устанавливают на упомянутом построечном месте элементы конструкции (объекты).
Недостатками указанного известного способа являются значительная трудоемкость позиционирования монтируемого объекта, обусловленная его размерами и формой, а также недостаточная точность позиционирования, обусловленная применением традиционных аналоговых средств измерения, сложностью пересчета и большим промежутком времени между измерениями и получением конечных цифр, отражающих отклонение устанавливаемого объекта от его проектного положения.
Наиболее близким к заявляемому изобретению является способ определения взаимного положения объектов (см. патент Российской Федерации №2468383, МПК G01S 11/12 от 2011 г.), который принимается за прототип заявляемого изобретения. Согласно выбранному прототипу для определения взаимного положения объектов создают измерительную систему, включающую в себя не менее трех оптических реперов с фиксированными координатами, известными в произвольной системе координат, именуемой базовой системой координат (БСК); установленные на объекте и жестко с ним связанные реперные оптические отражатели (РОО) с известными теоретическими координатами, а также оптико-электронный измеритель углов и расстояний и электронный вычислитель (ЭВ), причем фиксированные координаты упомянутых оптических реперов и теоретические координаты реперных оптических отражателей (РОО) вводят в упомянутый электронный вычислитель (ЭВ). При этом комплект оптических реперов, в который входят не менее трех реперных оптических излучателей, установлен на одном объекте, а оптический измерительный комплект в виде оптико-электронного измерителя углов и расстояний и электронного вычислителя (ЭВ) установлен на другом объекте. С помощью измерительного комплекта определяют углы визирования каждого реперного оптического излучателя и разности между расстоянием до произвольно выбранного реперного оптического излучателя и расстояниями до остальных реперных оптических излучателей и по этим данным вычисляют параметры взаимного положения объектов.
Недостатками прототипа являются значительная сложность процесса и высокая стоимость измерительной системы, а также невозможность его использования для установки объекта в проектное положение путем сравнения его фактического положения с заданным теоретическим положением, например, в условиях одной сборочной площадки.
Техническим результатом заявляемого изобретения является упрощение процесса определения фактического положения объекта сложной формы и значительных размеров в сравнении с его теоретическим положением при уменьшении трудоемкости монтажа и снижении стоимости измерительной системы.
Указанный технический результат достигается в способе установки объекта в проектное положение путем сравнения его фактического положения с заданным теоретическим положением, согласно которому создают измерительную систему, включающую в себя не менее трех оптических реперов с фиксированными координатами, известными в произвольной системе координат, именуемой базовой системой координат (БСК); установленные на объекте и жестко с ним связанные реперные оптические отражатели (РОО) с известными теоретическими координатами, а также оптико-электронный измеритель углов и расстояний и электронный вычислитель (ЭВ), причем фиксированные координаты упомянутых оптических реперов и теоретические координаты реперных оптических отражателей (РОО) вводят в упомянутый электронный вычислитель (ЭВ), тем, что предварительно подготавливают монтажную площадку для установки объекта, создают 3D модель упомянутого объекта методом компьютерной графики и вводят ее теоретические координаты в ЭВ, при этом теоретические координаты РОО, размещенных на объекте, известны именно в той теоретической системе координат (3DK), в которой разработана 3D модель объекта, после чего на монтажную площадку в произвольном порядке стационарно устанавливают упомянутые оптические реперы, а затем в произвольную точку монтажной площадки устанавливают оптико-электронный измеритель углов и расстояний в виде электронного тахеометра (ЭТ), измеряют в произвольно ориентированной системе координат, связанной с ЭТ, фактические координаты стационарно установленных упомянутых оптических реперов и вводят эти координаты в вычислитель ЭВ, в котором уже содержатся координаты этих оптических реперов в БСК, после чего для совмещения теоретической 3DK и фактической систем координат объекта на монтажной площадке устанавливают направляющие оптические реперы, которые располагают в характерных точках, определяющих базовую систему координат монтируемого объекта, затем, не меняя пространственного положения ЭТ, производят измерения координат упомянутых направляющих оптических реперов, после чего в вычислителе ЭВ на основании данных измерений производят пересчет координат любой точки на монтажной площадке, в любой произвольной системе координат, связанной с ЭТ, в координаты системы 3DK, затем посредством ЭТ замеряют фактические координаты РОО и направляют данные о них в вычислитель ЭВ, где известно их точное проектное положение в системе координат 3DK, тем самым определяют отклонения положения монтируемого объекта от его проектного положения в режиме реального времени, после чего по определенным значениям корректируют фактическое положение объекта посредством грузоподъемных или иных технических средств.
Указанный технический результат достигается также тем, что, после того, как в произвольную точку монтажной площадки устанавливают оптико-электронный измеритель углов и расстояний в виде электронного тахеометра (ЭТ), измеряют в произвольно ориентированной системе координат, связанной с ЭТ, координаты стационарно установленных упомянутых оптических реперов и вносят эти координаты в вычислитель ЭВ, в котором уже содержатся координаты этих оптических реперов в БСК, упомянутый ЭТ демонтируют с монтажной площадки и через некоторый интервал времени, определяемый технологическими или иными причинами, упомянутый ЭТ вновь выносят и устанавливают на монтажной площадке в произвольной точке, затем дальнейший процесс установки объекта в проектное положение производится соответственно приведенному в п.1 формулы.
Сущность заявляемого изобретения поясняется чертежами.
На фигуре 1 изображена монтажная площадка с установленным на ней объектом и основными элементами измерительной системы;
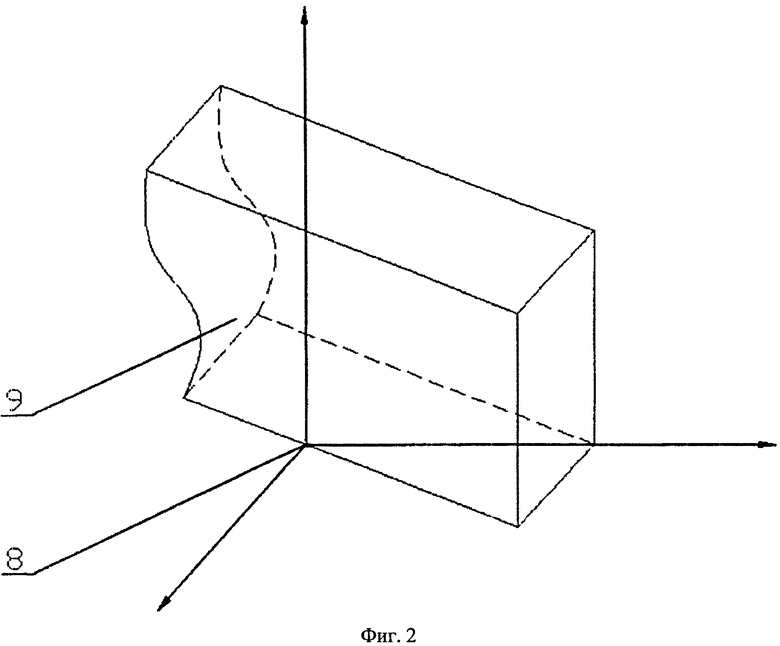
на фиг.2 - 3D модель объекта в теоретической (3DK) системе координат;
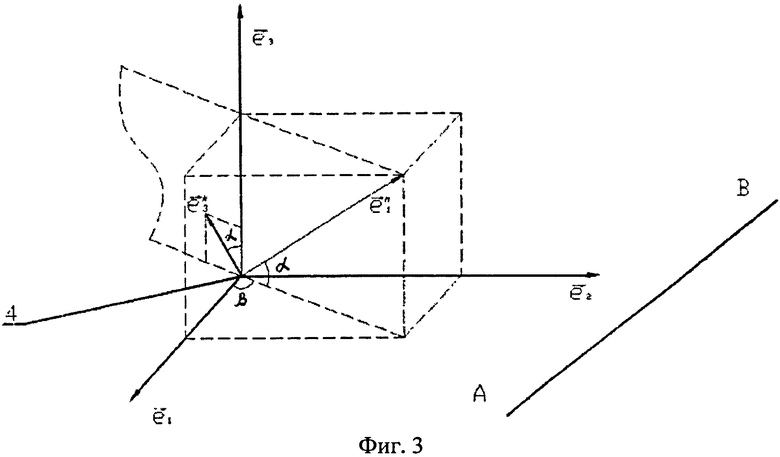
на фиг.3 - объект в базовой системе координат;
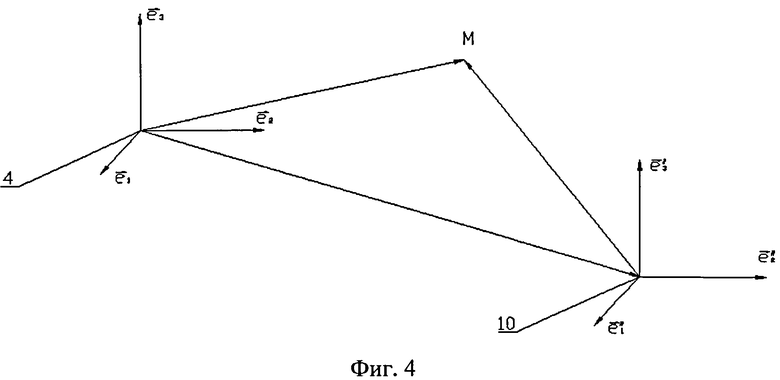
на фиг.4 - схема определения координат фактического местоположения точки на объекте в данный момент времени.
Для установки объекта 1 в проектное положение путем сравнения его фактического положения с заданным теоретическим положением создают измерительную систему, включающую в себя размещенные на предварительно подготовленной монтажной площадке 2 не менее трех оптических реперов 3, (которые представляют собой световозвращающие элементы с обозначенным центром) с фиксированными координатами, известными в произвольной системе координат 4, именуемой базовой системой координат БСК; установленные на объекте 1 и жестко с ним связанные реперные оптические отражатели РОО 5 с известными теоретическими координатами 3DK, а также оптико-электронный измеритель углов и расстояний в виде электронного тахеометра ЭТ 6 и электронный вычислитель ЭВ 7, причем фиксированные в системе 4 БСК координаты упомянутых оптических реперов 3 и теоретические 3DK координаты РОО 5 введены в упомянутый ЭВ 7. Для совмещения теоретической 8 системы координат 3DK, в которой расположена 3D модель 9 монтируемого объекта 1, и фактической 10 системы координат объекта 1 измерительная система дополнительно снабжена направляющими оптическими реперами 11, устанавливаемыми на монтажной площадке 2 в характерных точках на осевой базовой линии 12, определяющей систему координат монтируемого объекта 1.
Заявляемый способ установки объекта в проектное положение путем сравнения его фактического положения с заданным теоретическим положением осуществляется следующим образом.
Перед началом строительства предварительно подготавливают монтажную площадку 2, затем в произвольном порядке, определяемом лишь характером строящегося сооружения - монтируемого (устанавливаемого) объекта 1, например, секции судна, стационарно устанавливают оптические реперы 3. После этого посредством ЭТ 6, который устанавливают в любой удобной точке монтажной площадки 2, фиксируют координаты реперов 3 в системе 4 координат БСК и вносят их в память электронного вычислителя ЭВ 7. Также предварительно посредством любого компьютера (не показан) создают 3D модель 9 монтируемого объекта 1 с установленными и обозначенными на ней РОО 5, имеющими теоретические координаты в системе 8 координат 3DK, в которой разработана 3D модель 9 объекта 1. Вводят эту 3D модель 9 в ЭВ 6, после чего на монтажную площадку 2 в произвольном порядке снова стационарно устанавливают оптические реперы 3. Для совмещения теоретической (3DK) 8 и фактической 10 систем координат объекта 1, на монтажной площадке устанавливают направляющие оптические реперы 11, которые располагают в характерных точках A и B, определяющих базовую систему 4 координат БСК монтируемого объекта 1. Затем, не меняя пространственного положения ЭТ 6, производят измерения координат упомянутых направляющих оптических реперов 11, после чего в вычислителе ЭВ 7 на основании данных измерений производят пересчет координат любой точки на монтажной площадке 2, в любой произвольной фактической 10 системе координат, связанной с ЭТ 6, в координаты системы 8 3DK, затем посредством ЭТ6 замеряют фактические координаты РОО 5 и направляют данные о них в вычислитель ЭВ 7, где известно их точное проектное положение в системе 8 координат 3DK
Далее следует пояснение изображенного на фиг.3 и фиг.4.
Имеется базовая система 4 координат БСК. На монтажной площадке 2 мы определяем осевую базовую линию 12 будущего объекта (например, корпуса судна, состоящего из секций 1). В точки А и В мы помещаем направляющие реперы 11, и из какой-либо фактической системы координат посредством ЭТ 6 определяем координаты точек A и B. При этом координаты точек A и B в базовой 4 системе БСК известны и равны x1A, x2A, x3A, x1B, x2B, x3B.
Фактическая система координат, которую мы будем строить, обозначена позицией 10.
Направим орт (единичный вектор)  системы 10 по оси AB. Тогда для проекций
системы 10 по оси AB. Тогда для проекций  на оси
на оси  ,
,  ,
,  системы 4 БСК можно записать:
системы 4 БСК можно записать:



Проведем плоскость через оси и  .
.
Ось  всегда направлена строго вертикально. Ось
всегда направлена строго вертикально. Ось  построим как лежащую в этой плоскости перпендикулярно к оси . Ось
построим как лежащую в этой плоскости перпендикулярно к оси . Ось  будем строить как нормаль к этой плоскости, причем
будем строить как нормаль к этой плоскости, причем  ,
,  ,
,  должны образовывать правую тройку векторов.
должны образовывать правую тройку векторов.
 ,
,
Для проекций вектора  на оси базовой системы 4 БСК можно записать:
на оси базовой системы 4 БСК можно записать:



Для проекций вектора  на оси базовой системы 4 БСК можно записать:
на оси базовой системы 4 БСК можно записать:
Таким образом, имеются проекции всех векторов  ,
,  ,
,  , , , друг на друга.
, , , друг на друга.
Примем координаты точки A (фиг.4) в базовой системе координат 4 БСК за начало координат в фактической системе 10.
Тогда координаты точки M в фактической системе 10 -  ,
,  ,
,  выражаются через координаты точки M в базовой системе 4 -xM1, xM2, xM3 следующим образом:
выражаются через координаты точки M в базовой системе 4 -xM1, xM2, xM3 следующим образом:

Если нам в процессе работы потребуется передвинуть систему координат 10 с параллельным переносом осей, то координаты точки М во вновь полученной системе 10/// будут составлять:
где c1, c2, c3 - величины сдвига по координатам в фактической системе.
Таким образом определяют отклонения положения монтируемого объекта 1 от его проектного положения в режиме реального времени, после чего но определенным значениям корректируют фактическое положение объекта 1 посредством грузоподъемных или иных технических средств (не показаны).
Процесс измерения и корректировки может повторяться до получения удовлетворительной точности монтажа.
Для объектов, имеющих плоскую форму (например, днищевая секция баржи - не показано), удобно строить систему координат объекта, которая задается плоскостью, а вернее, тремя точками, которые задают плоскость.
Согласно п.2 формулы заявленного способа после того, как в произвольную точку монтажной площадки 2 устанавливают ЭТ 6, измеряют в произвольно ориентированной системе координат, связанной с ЭТ 6, координаты стационарно установленных оптических реперов 3 и вносят эти координаты в ЭВ 7, в котором уже содержатся координаты этих оптических реперов 3 в БСК, ЭТ демонтируют с монтажной площадки 2. Через некоторый интервал времени, определяемый технологическими или иными причинами, ЭТ 6 вновь выносят и устанавливают на монтажной площадке 2 в совершенно произвольной точке, затем дальнейший процесс установки объекта 1 в проектное положение производится в соответствии с описанным выше в п.1 формулы изобретения.
Заявляемый способ установки объекта в проектное положение может применяться для установки в проектное положение одновременно или постепенно нескольких объектов (например, секций корпуса судна), которые нужно объединить в одно целое.
Технико-экономическим преимуществом заявляемого изобретения является упрощение процесса установки объекта сложной формы и значительных размеров при его монтаже путем определения фактического положения объекта в сравнении с его теоретическим положением в режиме реального времени при уменьшении трудоемкости и стоимости измерительной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ ПОЛОЖЕНИЯ ТРУБОПРОВОДОВ НАДЗЕМНОЙ ПРОКЛАДКИ В УСЛОВИЯХ ВЕЧНОЙ МЕРЗЛОТЫ | 2014 |
|
RU2582428C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| Способ идентификации реперов при решении задачи Р4Р в авиационных оптико-электронных системах позиционирования с единственной камерой | 2020 |
|
RU2749808C1 |
| Способ определения собственных координат по трем визирным светоизлучающим маркерам | 2024 |
|
RU2838123C1 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| Способ управления амплитудно-фазовым распределением на раскрыве фазированной антенной решетки | 2016 |
|
RU2644999C2 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| СПОСОБ УСТАНОВКИ ИЗДЕЛИЯ В ЗАДАННОЕ ПРОСТРАНСТВЕННОЕ ПОЛОЖЕНИЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2226168C1 |
| СПОСОБ ПРОИЗВОДСТВА КООРДИНАТНЫХ ИСПОЛНИТЕЛЬНЫХ СЪЕМОК | 2004 |
|
RU2267745C1 |
Изобретение относится к области измерения положения в пространстве различных неподвижных объектов. В указанном способе подготавливают монтажную площадку для установки объекта, создают 3D модель указанного объекта методом компьютерной графики и вводят ее теоретические координаты в электронный вычислитель (ЭВ), при этом теоретические координаты РОО (реперные оптические отражатели), размещенных на объекте, известны именно в той теоретической системе координат (3DK), в которой разработана 3D модель объекта. Далее на монтажную площадку в произвольном порядке стационарно устанавливают упомянутые оптические реперы, а затем в произвольную точку монтажной площадки устанавливают оптико-электронный измеритель углов и расстояний в виде электронного тахеометра (ЭТ), измеряют в произвольно ориентированной системе координат фактические координаты стационарно установленных оптических реперов и вводят эти координаты в вычислитель ЭВ, в котором уже содержатся координаты этих оптических реперов в БСК (базовая система координат). Для совмещения теоретической 3DK и фактической систем координат объекта устанавливают направляющие оптические реперы, определяющих базовую систему координат монтируемого объекта, затем измеряют координаты упомянутых направляющих оптических реперов, далее в ЭВ на основании данных измерений производят пересчет координат любой точки на монтажной площадке, в координаты системы 3DK, измеряя фактические координаты РОО, и направляют данные о них в ЭВ, определяя отклонения положения монтируемого объекта от его проектного положения. Технический результат - упрощение процесса определения фактического положения объекта сложной формы. 1 з.п. ф-лы, 4 ил.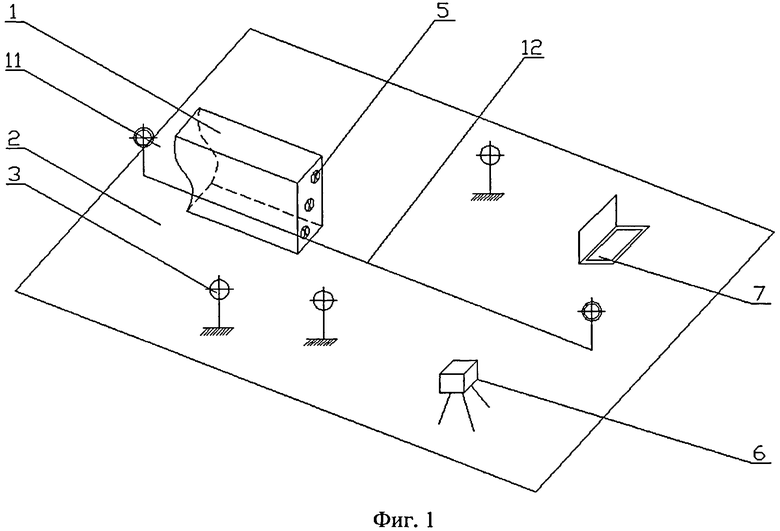
1. Способ установки объекта в проектное положение путем сравнения его фактического положения с заданным теоретическим положением, согласно которому создают измерительную систему, включающую в себя не менее трех оптических реперов с фиксированными координатами, известными в произвольной системе координат, именуемой базовой системой координат (БСК); установленные на объекте и жестко с ним связанные реперные оптические отражатели (РОО) с известными теоретическими координатами, а также оптико-электронный измеритель углов и расстояний и электронный вычислитель (ЭВ), причем фиксированные координаты упомянутых оптических реперов и теоретические координаты реперных оптических отражателей (РОО) вводят в упомянутый электронный вычислитель (ЭВ), отличающийся тем, что предварительно подготавливают монтажную площадку для установки объекта, создают 3D модель указанного объекта методом компьютерной графики и вводят ее теоретические координаты в ЭВ, при этом теоретические координаты РОО, размещенных на объекте, известны именно в той теоретической системе координат (3DK), в которой разработана 3D модель объекта, после чего на монтажную площадку в произвольном порядке стационарно устанавливают упомянутые оптические реперы, а затем в произвольную точку монтажной площадки устанавливают оптико-электронный измеритель углов и расстояний в виде электронного тахеометра (ЭТ), измеряют в произвольно ориентированной системе координат, связанной с ЭТ, фактические координаты стационарно установленных упомянутых оптических реперов и вводят эти координаты в вычислитель ЭВ, в котором уже содержатся координаты этих оптических реперов в БСК, после чего для совмещения теоретической 3DK и фактической систем координат объекта, на монтажной площадке устанавливают направляющие оптические реперы, которые располагают в характерных точках, определяющих базовую систему координат монтируемого объекта, затем, не меняя пространственного положения ЭТ, производят измерения координат упомянутых направляющих оптических реперов, после чего в вычислителе ЭВ па основании данных измерении производят пересчет координат любой точки на монтажной площадке, в любой произвольной системе координат, связанной с ЭТ, в координаты системы 3DK, затем посредством ЭТ замеряют фактические координаты РОО и направляют данные о них в вычислитель ЭВ, где известно их точное проектное положение в системе координат 3DK, тем самым определяют отклонения положения монтируемого объекта от его проектного положения в режиме реального времени, после чего по определенным значениям корректируют фактическое положение объекта посредством грузоподъемных или иных технических средств.
2. Способ установки объекта в проектное положение путем сравнения его фактического положения с заданным теоретическим положением по п.1, отличающийся тем, что после того, как в произвольную точку монтажной площадки устанавливают оптико-электронный измеритель углов и расстояний в виде электронного тахеометра (ЭТ), измеряют в произвольно ориентированной системе координат, связанной с ЭТ, координаты стационарно установленных упомянутых оптических реперов и вносят эти координаты в вычислитель ЭВ, в котором уже содержатся координаты этих оптических реперов в БСК, упомянутый ЭТ демонтируют с монтажной площадки и через некоторый интервал времени, определяемый технологическими или иными причинами, упомянутый ЭТ вновь выносят и устанавливают на монтажной площадке в произвольной точке, затем дальнейший процесс установки объекта в проектное положение производится соответственно приведенному в п.1 формулы.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2006794C1 |
| Способ установки объекта в проектное положение | 1981 |
|
SU969867A1 |
| US 20110109915 A1 (Andreas Buehlmann), 12.05.2011 | |||
| US 20090177435 A1 (Mikko Heininen), 09.07.2009 | |||

