Изобретения относятся к области железнодорожного транспорта, а именно к выправке и контролю железнодорожного пути при его ремонте.
Известные способы и путевые машины, предназначенные для выправки железнодорожного пути, не обеспечивают одновременно выправку и контроль выправленного пути в неподвижной системе координат, в том числе и с использованием спутниковых технологий или специальной реперной сети.
Известна выправочно-подбивочно-рихтовочная машина для выправки и контроля железнодорожного пути (см. RU №2193616 C1, E01B 27/16, опубл. 27.11.2002), которая содержит раму, опирающуюся на ходовые тележки, смонтированные на раме подъемно-рихтовочное устройство, шпалоподбивочное устройство и устройство для подъемки и подбивки ответвлений пути, включающее в себя раму и смонтированные на ней по меньшей мере один каток для опирания на рельс, захват для рельса, опору, связанную с приводом вертикального перемещения. Подбивочный орган с виброприводом представляет собой подбивочную плиту с клиновыми подбойками в нижней части, размещаемыми с обеих сторон рельса. При этом упомянутые опора и подбивочная плита шарнирно установлены на одной оси, связанной с приводом вертикального перемещения.
Недостатком данной машины является то, что эта машина не позволяет оценить качество выправки пути и эффективность работы подбивочных органов.
Известна выправочно-подбивочно-рихтовочная машина для выправки и контроля железнодорожного пути (см. RU №2230848 C1, E01B 31/08, 35/06, опубл. 20.06.2004) - прототип, включающая раму, опирающуюся на ходовые тележки, шпалоподбивочное устройство и подъемно-рихтовочное устройство, смонтированные на раме и расположенные между ходовыми тележками, а также контрольно-измерительное устройство и платформу, связанные с рамой машины. Контрольно-измерительное устройство содержит датчик пройденного пути, измерительные тележки и датчики стрел прогиба рельсовых нитей в продольном профиле, датчики уровня, датчики стрел изгиба рельсовых нитей в плане и датчик уклона, размещаемый в зоне выправленного пути и имеющий возможность измерения микроуклонов пути в продольном профиле.
Недостатком данной указанной выправочно-подбивочно-рихтовочной машины является то, что машина не позволяет оценить качество выполненной работы как по положению пути в пространстве, так и по степени уплотнения балласта.
Техническим результатом заявленного изобретения является повышение точности измерения пространственного положения железнодорожного пути и возможности обеспечения контроля проектного положения рельсового пути одновременно в двух взаимно перпендикулярных направлениях - в продольном профиле и в плане.
Заявленный технический результат достигается тем, что выправочно-подбивочно-рихтовочная машина для выправки и контроля железнодорожного пути, включающая раму, опирающуюся на ходовые тележки, шпалоподбивочное устройство и подъемно-рихтовочное устройство, смонтированные на раме и расположенные между ходовыми тележками, а также контрольно-измерительное устройство и платформу, связанные с рамой машины, дополнительно содержит измерительно-контрольную тележку, расположенную под платформой и выполненную с возможностью непосредственного измерения и контроля выправленного пространственного положения железнодорожного пути в процессе рабочего прохода машины, видеокамеры для наблюдения за конструкцией верхнего строения железнодорожного пути, установленные на измерительно-контрольной тележке или на платформе и связанные с видеосервером, установленным на машине, при этом измерительно-контрольная тележка снабжена контроллером, выход которого соединен с одним из входов компьютерной системы, установленной на машине, датчиками геометрии пути, связанными с контроллером, оборудованием для приема и обработки спутниковых сигналов глобальной навигационной спутниковой системы ГНСС, выполненным с возможностью взаимодействия с переносными и/или стационарными комплектами спутниковой навигационной системы, установленными за пределами рельсового пути, и с компьютерной системой машины, оптико-электронной системой измерения фактического положения пути и блоком обработки видеоинформации, вход которого соединен с оптико-электронной системой, а выход - с соответствующим входом компьютерной системы машины.
При этом комплекты спутниковой навигационной системы могут быть установлены на опорных пунктах геодезической сети и/или на искусственных сооружениях железнодорожного пути.
Дополнительное снабжение машины измерительно-контрольной тележкой, на которую устанавливают видеокамеры для наблюдения за конструкцией верхнего строения железнодорожного пути, связанные с видеосервером машины, датчики геометрии пути, связанные с контроллером, оборудование для приема и обработки спутниковых сигналов глобальной навигационной спутниковой системы ГНСС, выполненное с возможностью взаимодействия с переносными и/или стационарными комплектами спутниковой навигационной системы, установленными за пределами рельсового пути, и с компьютерной системой машины, оптико-электронную систему измерения фактического положения пути и блок обработки видеоинформации, позволяет помимо выполнения всех рабочих функций по выправке пути, подбивке балласта осуществить контроль пространственного положения пути в неподвижных координатах - с использованием спутниковых систем и с использованием специальной реперной сети, обеспечивая тем самым достоверный автоматизированный контроль пространственного положения выправленного пути с высокой точностью во всех плоскостях: по длине пути, в плане, продольном профиле, по уровню и ширину колеи, а также общий вид конструкции верхнего строения пути (ВСП). Помимо этого заявленная выправочно-подбивочно-рихтовочная машина наделена новыми диагностическими функциями, позволяющими сразу после ремонта пути обоснованно рекомендовать скорости движения поездов, что особенно важно для скоростных участков, где длительное ограничение скоростей движения после производства ремонта пути не допускается. Таким образом, использование данной машины позволяет повысить точность измерения пространственного положения железнодорожного пути, обеспечить контроль проектного положения рельсового пути, достоверно оценить качество ремонта до открытия движения поездов на высокоскоростных участках, получить оценку соответствия выправленного пути утвержденным требованиям.
Известно устройство для контроля пространственного положения железнодорожного пути (US 5613442 A, опубл. 25.03.1997, Е01В 33/00). Устройство включает в себя источник излучения, расположенный на измерительной тележке, фотоприемный блок и датчик наклона, расположенные на путевой машине, и блок обработки. Измерение проводится следующим образом. Сначала выставляется оптический отсчетный луч между источником излучения на измерительной тележке и фотоприемным блоком на путевой машине, разделенные измеряемым участком пути. По мере движения путевой машины навстречу измерительной тележке происходит непрерывное считывание точки падения луча на фоточувствительную площадку позиционно-чувствительного приемника. По совокупности данных от позиционно-чувствительного приемника и датчика наклона блок обработки рассчитывает текущие координаты железнодорожного полотна, необходимые для выправки пути.
Недостатком устройства является низкая точность измерений из-за необходимости обеспечения точности выставления излучателя на измерительной тележке, невозможность привязки задаваемой системы координат к геодезической привязке проектного положения железнодорожного пути при непрерывном движении машины, низкая производительность, обусловленная необходимостью периодической перестановки измерительной тележки, и обеспечение соответствующей настройки.
Известна также оптико-электронная система выправочно-подбивочно-рихтовочной машины, включающая, по меньшей мере, один источник излучения, расположенные на контрольно-измерительной тележке упомянутой машины блок обработки информации и фотоприемный блок, оптически связанный с источником излучения (RU 2256575, опубл. 04.11.2003, В61K 9/08) - прототип, включающая источник излучения, измерительную тележку, установленную на рельсовом пути, на которой расположены блок обработки и фотоприемный блок, оптически связанный с источником излучения. При этом источник излучения, представляющий собой светодиод, установлен на первой по ходу движения измерительной тележке, связанной со второй измерительной тележкой как кинематически, так и оптическим измерительным каналом. Фотоприемный блок, установленный на второй по ходу движения измерительной тележке, состоит из оптической приемно-анализирующей системы, включающей в себя объектив и позиционно-чувствительный приемник оптического излучения, установленный в плоскости анализа изображения светодиода, и электронного устройства определения координат энергетического центра оптического изображения. Последнее устройство подключено к позиционно-чувствительному приемнику оптического излучения. Визирная ось фотоприемного блока расположена номинально параллельно базовому рельсу. Для измерения углов наклона тележек на них установлены датчики уровня. Для “привязки” результатов измерений к пройденному пути, то есть для обеспечения сопоставимости результатов измерений пикетажу, на второй тележке также расположен инкрементный датчик пройденного пути (одометр). Информацию о смещении источника излучения относительно визирной оси фотоприемного блока, а также данные о пройденном тележками расстоянии обрабатывают в блоке обработки, осуществляющем алгоритмическую обработку информации.
Недостатком известного устройства является наличие нескольких измерительных тележек и низкая точность измерения при непрерывном движении машины из-за невозможности привязки приборной системы координат к абсолютной геодезической системе координат, в которой задано проектное положение железнодорожного пути.
Техническим результатом заявленного изобретения является повышение точности измерения пространственного положения железнодорожного пути и возможности обеспечения контроля проектного положения рельсового пути одновременно в двух взаимно перпендикулярных направлениях - в продольном профиле и в плане.
Заявленный технический результат достигается тем, что в оптико-электронной системе для выправочно-подбивочно-рихтовочной машины, включающей, по меньшей мере, один источник излучения, расположенные на измерительно-контрольной тележке упомянутой машины блок обработки информации и фотоприемный блок, оптически связанный с источником излучения, в качестве источника излучения используют реперную марку, выполненную с возможностью ее установки, например, на опоре контактной сети, расположенной по ходу движения измерительно-контрольной тележки, и включающую модулированный светодиод, схему управления светодиодом, фотоприемник, выход которого через схему управления соединен с входом светодиода, связанный со светодиодом через схему управления и автономный источник питания, при этом фотоприемный блок содержит две приемно-анализирующие системы, датчик угла наклона и модуль управления, включающий излучатель, схему обработки информационных сигналов и фотоприемное устройство, выход которого через схему обработки информационных сигналов связан с входом излучателя, причем один из входов блока обработки информации связан с датчиком угла наклона, второй вход - с приемно-анализирующими системами, а третий вход - со схемой обработки информационных сигналов, поступающих от светодиода реперной марки.
При этом фотоприемное устройство выполнено в виде фотодиода с объективом.
Каждая приемно-анализирующая система включает объектив и позиционно-чувствительный приемник оптического излучения, установленный в плоскости анализа изображения светодиода.
В качестве датчика угла наклона может быть использован инклинометр.
Выполнен источник излучения таким образом, что он включает модулированный светодиод, фотоприемник, связанный со светодиодом через схему управления, и автономный источник питания, вынесение источника излучениия за пределы железнодорожного пути и «привязка» его положения к проектному положению пути, определенного в абсолютной геодезической измерительной сети (т.е. не зависящей от текущего положения пути), а также выполнение фотоприемного блока, содержащего две приемно-анализирующие системы, датчик угла наклона, модуль управления, и связь конструктивных элементов фотоприемного блока с блоком обработки информации позволяет устранить ошибку определения пространственного положения пути в процессе движения фотоприемного блока на тележке вдоль полотна, позволяет осуществить измерение фактического положения рельсового пути относительно его проектного положения, обеспечить возможность контроля пространственного положения железнодорожного полотна, что соответственно повышает точность измерения.
Сущность заявленного изобретения поясняется чертежами, где:
на фиг.1 представлена структурная схема выправочно-подбивочно-рихтовочной машины;
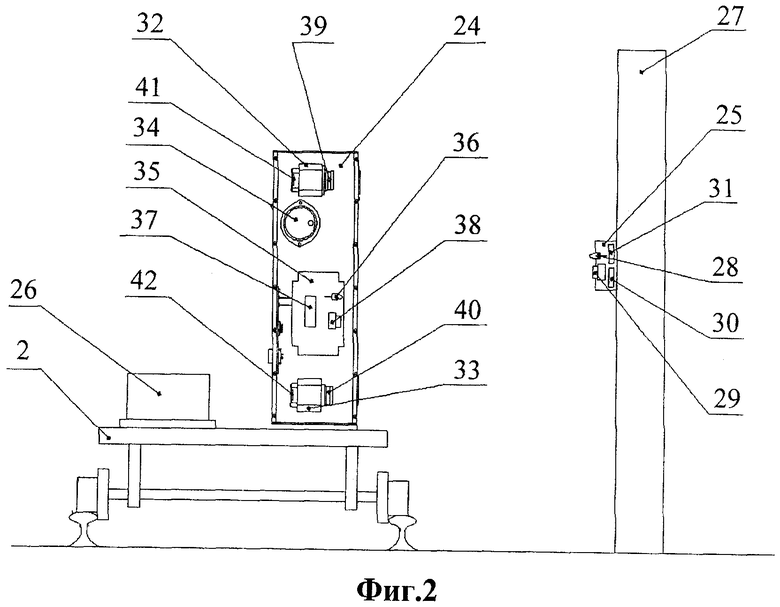
на фиг.2 представлена общая схема расположения конструктивных элементов оптико-электронной системы;
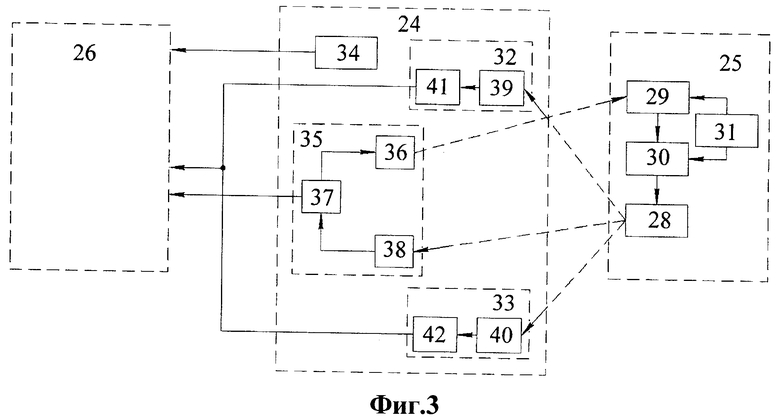
на фиг.3 представлена структурная схема оптико-электронной системы;
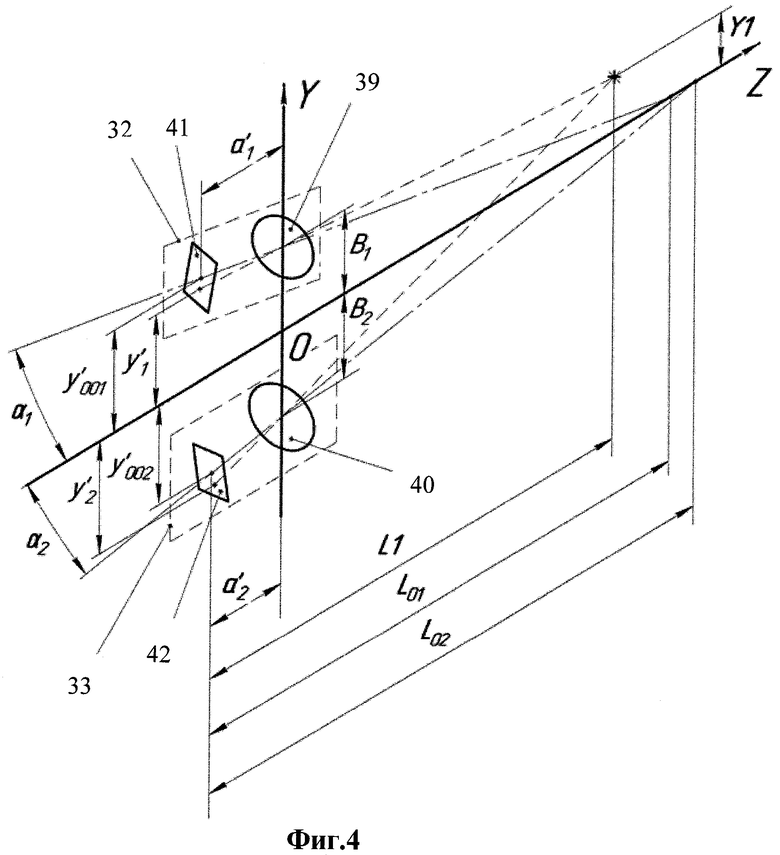
на фиг.4 - принципиальная схема измерения, реализуемая оптико-электронной системой.
Для использования заявленного решения может быть использована выправочно-подбивочно-рихтовочная машина 1, которая включает раму, опирающуюся на ходовые тележки, шпалоподбивочное устройство и подъемно-рихтовочное устройство, смонтированные на раме и расположенные между ходовыми тележками, а также контрольно-измерительное устройство и платформу, связанные с рамой машины 1 (на фиг. не показаны). Дополнительно машина 1 содержит измерительно-контрольную тележку 2 (см. фиг.1), которая расположена под платформой и выполнена с возможностью непосредственного измерения и контроля выправленного пространственного положения железнодорожного пути в процессе рабочего прохода машины 1.
Измерительно-контрольная тележка 2 снабжена контроллером 3, выход которого соединен с одним из входов компьютерной системы 4, установленной на машине 1, датчиками геометрии пути, связанными с контроллером 3, оборудованием для приема и обработки спутниковых сигналов глобальной навигационной спутниковой системы (ГНСС), оптико-электронной системой 5 измерения фактического положения пути и блоком 6 обработки видеоинформации. На измерительно-контрольную тележку 2 могут быть установлены видеокамеры 7, связанные с видеосервером 8, установленным на машине 1, для наблюдения за конструкцией верхнего строения железнодорожного пути. Видеокамеры 7 могут быть установлены непосредственно на платформе машины 1. Полученные результаты видеонаблюдения за конструкцией верхнего строения железнодорожного пути могут быть выведены на монитор 9, установленный на выправочно-подбивочно-рихтовочной машине 1.
В состав датчиков геометрии пути, установленных на тележке 2, входят датчик пути 10, датчик ширины колеи 11, акселерометр 12, гироскопические датчики 13, датчик уровня 14.
Оборудование для приема и обработки спутниковых сигналов ГНСС (GPS/ГЛОНАСС) выполнено с возможностью взаимодействия с переносными и/или стационарными комплектами 15 спутниковой навигационной системы, установленными за пределами рельсового пути и связанными с компьютерной системой 4 машины. Оборудование для приема и обработки спутниковых сигналов ГНСС может содержать антенну 16, приемник спутниковых сигналов 17, модем 18 и контроллер 19 GPS/ГЛОНАСС. Комплекты 15 спутниковой навигационной системы могут быть установлены на опорных пунктах геодезической сети и/или на искусственных сооружениях железнодорожного пути, расположенных вдоль железнодорожного полотна. Как правило, комплект 15 спутниковой навигационной системы включает антенну 20, приемник спутниковых сигналов 21 и модем 22. Связь оборудования для приема и обработки спутниковых сигналов ГНСС (GPS/ГЛОНАСС) и комплектов 15 спутниковой навигационной системы осуществляется соответственно посредством модемов 18 и 22.
Вход блока обработки видеоинформации 6 соединен с оптико-электронной системой 5 (ОЭС), а выход - с соответствующим входом компьютерной системы 4 машины 1. Компьютерная система 4 машины 1 предназначена для расчета пространственного положения выправленного пути, результатов обработки данных после выправки и составления программных заданий, содержащих расчетные параметры (такие как сдвиги и подъемки пути) для установки пути в проектное положение. Для визуализации результатов обработки полученные данные могут быть выведены на монитор 23, входящий в состав выправочно-подбивочно-рихтовочной машины 1.
Оптико-электронная система 5 выправочно-подбивочно-рихтовочной машины 1 обеспечивает одновременный контроль положения железнодорожного пути относительно входящих в комплект оптико-электронной системы реперных марок (меток) в двух взаимно перпендикулярных направлениях (в продольном профиле и плане) при непрерывном движении машины 1 с высокой точностью и «привязкой» измеряемых координат к проектному положению пути. Оптико-электронная система 5 может быть использована также для любой путевой машины, осуществляющей ремонт железнодорожного пути.
Оптико-электронная система 5 (см. фиг.2 и фиг.3) включает три функциональных блока: фотоприемный блок 24, одну или несколько реперных марок 25 и блок 26 обработки информации. Фотоприемный блок 24 и блок 26 обработки информации установлены на контрольно-измерительной тележке 2 выправочно-подбивочно-рихтовочной машины 1. Возможна также отдельная установка блоков 24 и 26 на любую другую измерительную тележку, связанную с машиной 1 и выполненную с возможностью перемещения по рельсовому пути вместе с машиной 1.
Реперная марка 25 может быть закреплена на опорах 27 контактной сети или других конструкциях вдоль железнодорожного пути по ходу движения машины 1 в соответствии с геодезическими отметками проектного положения пути. Составными частями реперной марки 25 являются модулированный светодиод 28, фотоприемник 29, связанный со светодиодом 28 через схему 30 управления светодиодом, и автономный источник питания 31, обеспечивающий питание конструктивных элементов реперной марки 25.
Фотоприемный блок 24 содержит две приемно-анализирующие системы 32 и 33, датчик 34 угла наклона железнодорожного полотна и модуль управления 35, включающий излучатель 36, схему 37 обработки информационных сигналов и фотоприемное устройство 38. Выход фотоприемного устройства 38 через схему 37 обработки информационных сигналов связан с входом излучателя 36. Модуль управления 35 служит для активации светодиода 28, а также выработки в момент прохождения измерительно-контрольной тележки 2 машины 1 реперной марки 25 управляющего сигнала, по которому оптические приемно-анализирующие системы 32 и 33 захватывают изображения светодиода 28 и преобразуют его в цифровые электрические сигналы. В качестве датчика 34 угла наклона может быть использован инклинометр. Приемно-анализирующие системы 32 и 33 служат для приема оптического изображение светодиода 28 и преобразования его в цифровые электрические сигналы. Каждая приемно-анализирующая система 32 и 33 включает объектив (соответственно 39 и 40) и позиционно-чувствительный приемник оптического излучения (соответственно 41 и 42), установленный в плоскости анализа изображения светодиода 28. Оптические оси этих систем пересекаются в точке максимальной дальности измерения. Фотоприемное устройство 38 может быть выполнено в виде фотодиода с объективом.
Обмен информацией между реперной маркой 25 и фотоприемным блоком 24 осуществляется посредством четырех оптических каналов. Первый канал соединяет излучатель 36 с фотоприемником 29 и служит для формирования сигнала о нахождении данной реперной марки 25 в поле зрения фотоприемного блока 24. Второй канал соединяет излучатель 36 с фотоприемным устройством 38 и служит для активации процесса «захвата» кадров. Последние два канала, соединяющие излучатель 36 с оптическими приемно-анализирующими системами 32 и 33, необходимы для формирования и «захвата» изображений излучателя 36.
Фотоприемный блок 24, кроме того, обменивается управляющей и измерительной информацией с блоком 26 обработки информации посредством нескольких каналов. Один из входов блока 26 обработки информации связан с датчиком 34 угла наклона (посредством этого канала с датчика 34 угла наклона передается информация о наклоне фотоприемного блока 24), второй вход - с приемно-анализирующими системами (данный канал необходим для передачи преобразованных в электрические сигналы изображений от оптических приемно-анализирующих систем 32 и 33 в блок 26 обработки информации для вычисления требуемых значений дальности и смещения), а третий вход - со схемой 37 обработки информационных сигналов модуля управления 35 (посредством данного канала из модуля управления 35 в блок 26 передается информация о моменте прохождения фотоприемным блоком 24 реперной марки 25).
Таким образом, совокупные данные от оптических приемно-анализирующих систем 32 и 33, от модуля управления 35 и от датчика 34 угла наклона в блок 26 обработки информации, где происходит вычисление величин дальности до светодиода 28 и смещения относительно него, что определяет пространственное положение железнодорожного пути.
Выход блока 26 обработки информации является выходом оптико-электронной системы 5 в целом. Информация с выхода блока 26 обработки информации поступает на центральный блок обработки видеоинформации выправочно-подбивочно-рихтовочной машины 1.
На фиг.4 представлена принципиальная схема измерений, реализуемая оптико-электронной системой 5. В ОЭС оптические приемно-анализирующие системы 32 и 33 разнесены в пространстве на расстояние, равное величине базы В=В1+В2, а их оптические оси пересекают ось Oz приборной системы координат в точке максимальной дальности измерения, соответственно, L01 и L02, при этом образуя углы α1 и α2 с осью Oz. Оптические оси объективов 39 и 40 оптических приемно-анализирующих систем 32 и 33 проходят через точки  и
и  на поверхностях позиционно-чувствительных приемников оптического излучения 41 и 42 соответственно. Позиционно-чувствительные приемники оптического излучения 41 и 42 расположены на расстояниях
на поверхностях позиционно-чувствительных приемников оптического излучения 41 и 42 соответственно. Позиционно-чувствительные приемники оптического излучения 41 и 42 расположены на расстояниях  и
и  от задних узловых точек объективов 39 и 40. После захвата и анализа изображений светодиода 28 выдаются координаты
от задних узловых точек объективов 39 и 40. После захвата и анализа изображений светодиода 28 выдаются координаты  и
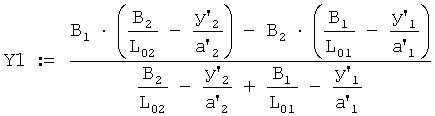
и  изображений в системе координат позиционно-чувствительных приемников оптического излучения. По этим координатам вычисляются величины дальности L1 и смещения Y1, определяющие пространственное положение железнодорожного пути.
изображений в системе координат позиционно-чувствительных приемников оптического излучения. По этим координатам вычисляются величины дальности L1 и смещения Y1, определяющие пространственное положение железнодорожного пути.
Далее показан принцип работы ОЭС 5.
При движении путевой машины 1 от одной опоры 27 контактной сети до другой происходит непрерывная съемка пространства оптическими приемно-анализирующими системами 32 и 33, но полученные кадры при этом не сохраняются и не обрабатываются. Кроме того, фотоприемный блок 24 также производит непрерывное освещение лежащего перед ним пространства при помощи излучателя 36. В момент прохождения опоры 27 с реперной маркой 25 фотоприемник 29 регистрирует падающее на него оптическое излучение от излучателя 36 и преобразует его в электрический сигнал. Сигнал с выхода фотоприемника 29 поступает на вход схемы 30 управления светодиодом 28, которая производит активацию источника излучения 28. Оптический сигнал от светодиода 28 попадает на фоточувствительную площадку фотоприемного устройства 38, которое преобразует падающее на него излучение в электрический сигнал. С выхода фотоприемного устройства 38 сигнал поступает на вход электронной схемы 37 обработки информативных сигналов, управляющей работой излучателя 36. Кроме того, электронная схема 20 обработки информативных сигналов формирует сигнал, поступающий на один из входов блока 26 обработки информации. По этому сигналу в модулях памяти каждого измерительного канала сохраняются кадры, поступившие в данный момент от оптических приемно-анализирующих систем 32 и 33 и содержащие изображения источника излучения (светодиода 28).
Определение смещений источника излучения (светодиода 28) относительно базовой точки приборной системы координат в вертикальном и продольном направлениях выполняется в два этапа. Сначала в блоке 26 обработки информации вычисляются вертикальные координаты «энергетических центров тяжести» изображений 
 (фиг.4) в пикселях. Алгоритм определения энергетического центра тяжести является наиболее простым и обеспечивает погрешность 0,1…0,01 размера элемента позиционно-чувствительного приемника 41 (42) оптического излучения. Затем на основании математической модели рассчитываются смещения L1 и Y1 относительно базовой точки, определяющие пространственное положение железнодорожного пути, с учетом поправки на неперпендикулярность расположения матриц к оптической оси объективов 39 и 40 соответственно в верхнем и нижнем каналах:
(фиг.4) в пикселях. Алгоритм определения энергетического центра тяжести является наиболее простым и обеспечивает погрешность 0,1…0,01 размера элемента позиционно-чувствительного приемника 41 (42) оптического излучения. Затем на основании математической модели рассчитываются смещения L1 и Y1 относительно базовой точки, определяющие пространственное положение железнодорожного пути, с учетом поправки на неперпендикулярность расположения матриц к оптической оси объективов 39 и 40 соответственно в верхнем и нижнем каналах:
- величина расстояния (рихтовка) в системе координат заявляемой системы равна
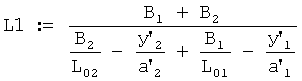
- величина смещения по вертикали (выправка) в системе координат заявляемой системы равна
Для уменьшения систематической погрешности работы ОЭС при наличии отклонения положения пути по уровню от нулевого измеряемые координаты L и Y пересчитываются по следующим конечным формулам:
L=L1 cos φ
Y=Y1-L1 tg φ
где φ - угол наклона пути (поступает от датчика 34 угла наклона).
Способ выправки и контроля железнодорожного пути с использованием выправочно-подбивочно-рихтовочной машины и оптико-электронной системы осуществляется следующим образом.
Для обеспечения установки пути в проектное положение при его ремонте требуется трех-четырехкратный проход выправочно-подбивочно-рихтовочной машины 1 по одному и тому же участку пути. При первом проходе выправочно-подбивочно-рихтовочной машины 1 непосредственно за щебнеочистительной машиной первая может работать по сглаживанию с заданием проектных параметров криволинейных участков пути (длин переходных кривых с конкретным расположением их по длине пути, возвышений по уровню и радиусов круговых кривых, направлений этих кривых). Во время первого рабочего прохода машины 1 одновременно с выправкой пути и подбивкой балласта осуществляют измерение выправленного положения пути в пространстве с учетом измерения положения пути относительно рабочих реперных марок 25. По результатам измерения выправленного положения пути в пространстве рассчитывается программное задание по сдвигам и подъемкам пути для ремонтируемого участка с целью использования результатов расчета и установки пути в проектное положение или близкое к проектному положению последующей выправочно-подбивочно-рихтовочной или той же машиной 1 при втором рабочем проходе. При этом с помощью оптико-электронной системы 5 считывания реперных меток 25 определяют фактическое положение пути в вертикальной и горизонтальной плоскостях, а сравнивая результаты измерения пути с проектным положением по вертикали, определяют величину подъемки пути для обеспечения его в проектное положение. В этом случае, для обеспечения установки пути в проектное положение или близкое к нему при втором рабочем проходе не потребуется производить измерительной поездки, так как программные задания будут сформированы по результатам предыдущего первого прохода машины 1. Сопоставляя фактическое положение выправленного пути по вертикали при первом рабочем проходе машины 1 с рассчитанной подъемкой пути и фактическим положением выправленного пути при втором рабочем проходе машины 1, определяют фактическую осадку пути, возникшую после прохода задней ходовой тележки машины. По величине полученной осадки пути определяют степень уплотнения балласта. Если между двумя соседними рабочими проходами машины 1 (машин) проходила поездная нагрузка, то ее учитывают при определении степени уплотнения балласта. Аналогичным образом вычисляют программные задания для обеспечения установки пути в проектное положение с определением степени уплотнения балласта при третьем (четвертом) рабочем проходе выправочно-подбивочно-рихтовочной машины 1 (машин).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА | 2000 |
|
RU2194111C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2387561C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНАЯ МАШИНА | 2009 |
|
RU2398062C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА | 2000 |
|
RU2193616C2 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА | 2006 |
|
RU2338823C2 |
| ВЫПРАВОЧНО-ПОДБИВОЧНАЯ МАШИНА | 2003 |
|
RU2261301C1 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
Группа изобретений относится к области железнодорожного транспорта, а именно к выправке и контролю железнодорожного пути при его ремонте. Выправочно-подбивочно-рихтовочная машина содержит раму, опирающуюся на ходовые тележки, шпалоподбивочное устройство и подъемно-рихтовочное устройство, контрольно-измерительное устройство и платформу, связанные с рамой машины, измерительно-контрольную тележку, видеокамеры для наблюдения за конструкцией верхнего строения железнодорожного пути. Измерительно-контрольная тележка снабжена контроллером, датчиками геометрии пути, оборудованием для приема и обработки спутниковых сигналов глобальной навигационной спутниковой системы ГНСС, оптико-электронной системой измерения фактического положения пути и блоком обработки видеоинформации. Оптико-электронная система выправочно-подбивочно-рихтовочной машины включает, по меньшей мере, один источник излучения, блок обработки информации и фотоприемный блок. В качестве источника излучения используют реперную марку. Реперная марка включает модулированный светодиод, схему управления светодиодом, фотоприемник и автономный источник питания. Фотоприемный блок содержит две приемно-анализирующие системы, датчик угла наклона и модуль управления, включающий излучатель, схему обработки информационных сигналов и фотоприемное устройство. Один из входов блока обработки информации связан с датчиком угла наклона, второй вход - с приемно-анализирующими системами, а третий вход - со схемой обработки информационных сигналов. Достигается повышение точности измерения пространственного положения железнодорожного пути. 2 н. и 4 з.п. ф-лы, 4 ил.
1. Выправочно-подбивочно-рихтовочная машина для выправки и контроля железнодорожного пути, включающая раму, опирающуюся на ходовые тележки, шпалоподбивочное устройство и подъемно-рихтовочное устройство, смонтированные на раме и расположенные между ходовыми тележками, а также контрольно-измерительное устройство и платформу, связанные с рамой машины, отличающаяся тем, что дополнительно содержит измерительно-контрольную тележку, расположенную под платформой и выполненную с возможностью непосредственного измерения и контроля выправленного пространственного положения железнодорожного пути в процессе рабочего прохода машины, видеокамеры для наблюдения за конструкцией верхнего строения железнодорожного пути, установленные на измерительно-контрольной тележке или на платформе и связанные с видеосервером, установленным на машине, при этом измерительно-контрольная тележка снабжена контроллером, выход которого соединен с одним из входов компьютерной системы, установленной на машине, датчиками геометрии пути, связанными с контроллером, оборудованием для приема и обработки спутниковых сигналов глобальной навигационной спутниковой системы ГНСС, выполненным с возможностью взаимодействия с переносными и/или стационарными комплектами спутниковой навигационной системы, установленными за пределами рельсового пути, и с компьютерной системой машины, оптико-электронной системой измерения фактического положения пути и блоком обработки видеоинформации, вход которого соединен с оптико-электронной системой, а выход - с соответствующим входом компьютерной системы машины.
2. Выправочно-подбивочно-рихтовочная машина по п.1, отличающаяся тем, что стационарные комплекты спутниковой навигационной системы установлены на опорных пунктах геодезической сети и/или на искусственных сооружениях железнодорожного пути.
3. Оптико-электронная система выправочно-подбивочно-рихтовочной машины, включающая, по меньшей мере, один источник излучения, расположенные на контрольно-измерительной тележке упомянутой машины блок обработки информации и фотоприемный блок, оптически связанный с источником излучения, отличающаяся тем, что в качестве источника излучения используют реперную марку, выполненную с возможностью ее установки на опоре контактной сети, расположенной по ходу движения измерительно-контрольной тележки, и включающую модулированный светодиод, схему управления светодиодом, фотоприемник, выход которого через схему управления соединен с входом светодиода, и автономный источник питания, при этом фотоприемный блок содержит две приемно-анализирующие системы, датчик угла наклона и модуль управления, включающий излучатель, схему обработки информационных сигналов и фотоприемное устройство, выход которого через схему обработки информационных сигналов соединен с входом излучателя, причем один из входов блока обработки информации связан с датчиком угла наклона, второй вход - с приемно-анализирующими системами, а третий вход - со схемой обработки информационных сигналов, поступающих от светодиода реперной марки.
4. Оптико-электронная система по п.3, отличающаяся тем, что фотоприемное устройство выполнено в виде фотодиода с объективом.
5. Оптико-электронная система по п.3, отличающаяся тем, что каждая приемно-анализирующая система включает объектив и позиционно-чувствительный приемник оптического излучения, установленный в плоскости анализа изображения светодиода.
6. Оптико-электронная система по п.3, отличающаяся тем, что в качестве датчика угла наклона используют инклинометр.

