Изобретения относятся к строительству и ремонту железнодорожного пути.
Известен способ выправки железнодорожного пути, заключающийся в том, что определяют положение пути между реперами относительно неподвижной системы измерения и выправляют железнодорожный путь (Попович М.В. и др. "Механизированная выправка железнодорожного пути". Учебное пособие по дисциплине "Путевые машины", часть 2, Санкт-Петербург, 1997 г., стр.5-12).
Известен способ выправки железнодорожного пути, заключающийся в том, что измеряют положение пути относительно реперов в точках их расположения, определяют положение пути между реперами, определяют соответствующие величины сдвигов и/или подъемок пути по результатам сравнения измеренного и определенного положений пути с проектным и выправляют железнодорожный путь в соответствии с этими величинами сдвигов и/или подъемок пути (проспект фирмы Plasser& Theurer, представленный на выставке путевых машин в г. Линц (Австрия) в сентябре 2000 г.).
Известна путевая машина, содержащая раму, опирающуюся на ходовые тележки, устройство для выправки железнодорожного пути, смонтированное на раме и включающее в себя подъемно-рихтовочное устройство и соединенное с ним измерительное устройство с датчиками измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню ("Машина выправочно-подбивочно-рихтовочная ВПР-02", Техническое описание и инструкция по эксплуатации, М., "Транспорт", 1995 г., стр.9-12, 68-93).
Известно устройство для выправки железнодорожного пути, содержащее подъемно-рихтовочное устройство и соединенное с ним измерительное устройство с датчиками измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню ("Машина выправочно-подбивочно-рихтовочная ВПР-02", Техническое описание и инструкция по эксплуатации, М., "Транспорт", 1995 г., стр. 68-93).
Известно измерительное устройство, содержащее датчики измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню ("Машина выправочно-подбивочно-рихтовочная ВПР-02", Техническое описание и инструкция по эксплуатации, М., "Транспорт", 1995 г., стр.81-93).
В известных способах выправки железнодорожного пути создают между рабочими (промежуточными) реперами базу отсчета (длинную хорду) в виде натянутой проволоки, лески, геодезической или оптической оси, например, с помощью лазерного луча (система EM-SAT), определяют положение пути между реперами относительно искусственно созданной базы отсчета, измеряют фактическое положение пути относительно реперов в местах их расположения (вручную или с использованием механизированных средств), сравнивают измеренное положение пути с проектным, программируют результаты сравнения в системы выправки пути выправочно-подбивочно-рихтовочных машин (определяют соответствующие величины сдвигов и/или подъемок пути по результатам сравнения) и выправляют путь в соответствии с этими введенными программными значениями (величинами сдвигов и/или подъемок пути и/или возвышения пути по уровню).
Так как фактическое положение пути может отличаться от проектного, то необходимо измерение фактического положения пути относительно рабочих реперов в местах их расположения. Эта работа в настоящее время осуществляется вручную или механизирована (используются специальные технические средства).
При ручных измерениях используют рулетку и шаблоны различных модификаций, рейки и пр., позволяющие измерять фактическое положение пути относительно рабочего репера в горизонтальной и/или в вертикальной плоскостях.
Имеется техническое средство (устройство) с использованием, например, специальной тележки легкой конструкции, на которой установлены электронный тахеометр, инклинометр, микроконтроллер с устройством для распечатки протокола и платой памяти данных. Это средство обслуживается одним человеком. Для определения фактического положения пути относительно репера устройство вручную устанавливают над меткой точки установки прибора, соответствующей положению репера, и фиксируют вручную затвором. Человек, обслуживающий это устройство, наводит электронный тахеометр на репер и осуществляет измерение фактического положения пути относительно репера. Действительные значения фактического положения пути и заданного (проектного) положения вносят в плату памяти, а затем передают компьютеру, установленному на специальной системе EM-SAT, с помощью которой можно сформировать программные задания сдвигов (подъемок) пути, возвышений для выправочных систем, установленных на выправочно-подбивочно-рихтовочных машинах. Описанное выше техническое средство измерения фактического положения пути относительно репера достаточно громоздко, так как содержит специальную тележку с установленным на ней дорогостоящим оборудованием, а использование его трудоемко, требует точной установки и фиксации его относительно репера. Для его обслуживания необходим специальный человек. Указанное техническое средство не позволяет автоматически определять фактическое положение пути относительно репера в месте его расположения.
Информации, полученной только в местах расположения реперов, для обеспечения работы сглаживающих систем по методу фиксированных точек и установки пути в проектное положение в неподвижной системе координат недостаточно. Для этого необходимо иметь информацию о фактическом положении пути в промежутке между реперами, которые находятся между собой на определенном расстоянии (60-80 м).
Известно несколько способов и устройств для задания базы отсчета между реперами:
- ручной способ, когда между реперами натягивают проволоку, леску или используют геодезическую ось теодолита, а в промежуточных точках между реперами производят измерения фактического положения пути относительно натянутой проволоки (лески) или геодезической оси;
- автоматизированный способ с использованием, например, специальной системы EM-SAT (главной машины), создающей оптическую базу отсчета между реперами и представляющей собой специальный измерительный вагон с двумя двухосными тележками, на котором установлено приемное устройство для лазерных лучей, устройства для измерения возвышения рельса, ширины колеи, пройденного пути, две видеокамеры и монитор для позиционирования измерительной оси относительно репера, промышленный компьютер с соответствующим программным обеспечением, печатающее устройство, и сателлитную тележку с установленным на ней лазерным передатчиком, создающим оптическую ось.
Процесс измерения в системе EM-SAT осуществляется циклически. Сателлит с лазером перемещают к следующему реперу и останавливают на расстоянии нескольких метров за этим репером. Лазер с помощью оптического прицела устанавливают относительно приемника главной машины. При этом главная машина с измерительной осью находится точно на репере, обозначенном цветной краской на подошве рельса дорожным мастером. Точное позиционирование машины облегчается посредством видеокамеры, которая показывает подошву рельса и колесо измерительной оси. Во время измерительной поездки измеряют фактическое положение пути относительно положения лазерного луча через каждые 20 метров и запоминают. После достижения следующего репера рассчитывают величины сдвижки и подъемки этого отрезка пути и выдают их на монитор и печатающее устройство. В это время сателлит уже перемещают к следующему реперу и лазер налаживают для следующей измерительной операции. Система EM-SAT позволяет измерять длинные неровности пути в плане и в продольном профиле за счет использования длинной лазерной хорды.
Перечисленные выше способы и устройства для измерения имеют следующие недостатки.
Так, использование проволоки или лески, которые не являются жесткими и неподвижными, при ручных способах измерения, влечет за собой появление погрешностей в результаты замеров. Кроме этого, применение измерительных линеек, необходимость постоянного контроля вертикального и горизонтального положения реек, планок и др. измерительного оборудования требует привлечения для получения необходимой информации нескольких человек, при этом на каждом замере накладывается влияние большого количества случайных и неслучайных факторов, значимость которых очень сложно вычленить из результата выполненного замера. Поэтому получить требуемую точность измерения фактического положения пути относительно проволоки или лески с использованием ручных средств измерения весьма проблематично и трудоемко. Более точно можно определить положение пути между реперами с использованием геодезических приборов, но этот способ также является трудоемким.
Менее трудоемким является способ измерения фактического положения пути между реперами с использованием специальной системы EM-SAT. Однако этому способу присущи также определенные недостатки. Трудоемкой в этом способе является операция по настройке лазерной системы при каждой перестановке сателлита. На точность измерения положения пути в этом способе могут влиять погрешности, возникающие при движении поездов по соседнему пути. Максимальная длина лазерной хорды может составить 250 метров только на прямых участках пути без переломов продольного профиля. Максимальная производительность системы EM-SAT составляет на прямых участках пути 2,5 км/час. Производительность резко падает при работе на кривых участках пути и составляет 1,1 км/час, так как на кривых малого радиуса длина лазерной хорды должна быть существенно меньше. Длина лазерной хорды на кривом участке пути зависит от ее радиуса и может быть от 60 м и более, то есть на кривом участке пути требуется больше перестановок лазерной хорды, чем на прямом участке пути.
Таким образом, для определения фактического положения пути и формирования программного задания устройствам для выправки пути сглаживающего типа для обеспечения установки пути в проектное положение в неподвижной системе координат в существующей путевой машине (наиболее близком аналоге), в существующем устройстве для выправки пути необходимо использовать:
- устройство с использованием специальной тележки (и обслуживающего его человека), обеспечивающее определение фактического положения пути в местах расположения рабочих реперов, и информацию о проектном положении пути;
- систему EM-SAT (специальный измерительный вагон) с сателлитной тележкой.
Стоимость вышеуказанного оборудования весьма велика, производительность на кривых участках пути резко снижается и для обслуживания этого оборудования требуется привлечение соответствующего персонала. Все это снижает эффективность известного способа выправки пути, устройства для выправки пути и путевой машины, реализующих этот способ выправки пути.
Техническим результатом изобретений является повышение качества выправки пути с обеспечением установки его в заданное (проектное) положение в неподвижной системе координат, повышение производительности работ по выправке пути за счет исключения персонала, необходимого для обслуживания специального измерительного вагона и специальной тележки.
Для достижения этого технического результата в способе выправки железнодорожного пути, заключающемся в том, что измеряют положение пути относительно реперов в точках их расположения, определяют положение пути между реперами, определяют соответствующие величины сдвигов и/или подъемок пути по результатам сравнения измеренного и определенного положений пути с проектным и выправляют железнодорожный путь в соответствии с этими величинами сдвигов и/или подъемок пути, определяют положение пути между реперами при помощи перемещаемого по пути измерительного устройства посредством измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню и расчета положения пути между реперами в неподвижной системе координат с учетом упомянутого измерения криволинейности пути и/или измерения возвышения пути по уровню.
Для достижения этого технического результата в путевой машине, содержащей раму, опирающуюся на ходовые тележки, устройство для выправки железнодорожного пути, смонтированное на раме и включающее в себя подъемно-рихтовочное устройство и соединенное с ним измерительное устройство с датчиками измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню, измерительное устройство снабжено устройством для автоматического определения положения пути относительно репера, размещаемого на обочине железнодорожного пути, и компьютером, с входами которого соединены все упомянутые датчики измерительного устройства и устройство для автоматического определения положения пути относительно репера, а выход компьютера соединен с подъемно-рихтовочным устройством.
Для достижения этого технического результата в устройстве для выправки железнодорожного пути, содержащем подъемно-рихтовочное устройство и соединенное с ним измерительное устройство с датчиками измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню, измерительное устройство снабжено устройством для автоматического определения положения пути относительно репера, размещаемого на обочине железнодорожного пути, и компьютером, с входами которого соединены все упомянутые датчики измерительного устройства и устройство для автоматического определения положения пути относительно репера, а выход компьютера соединен с подъемно-рихтовочным устройством.
Кроме этого, устройство для автоматического определения положения пути относительно репера состоит из датчика измерения фактического положения пути в горизонтальной и вертикальной плоскостях относительно репера и датчика уровня для измерения фактического положения пути по уровню.
Для достижения этого технического результата измерительное устройство, содержащее датчики измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню, снабжено устройством для автоматического определения положения пути относительно репера, размещаемого на обочине железнодорожного пути, и компьютером, с входами которого соединены все упомянутые датчики измерительного устройства и устройство для автоматического определения положения пути относительно репера.
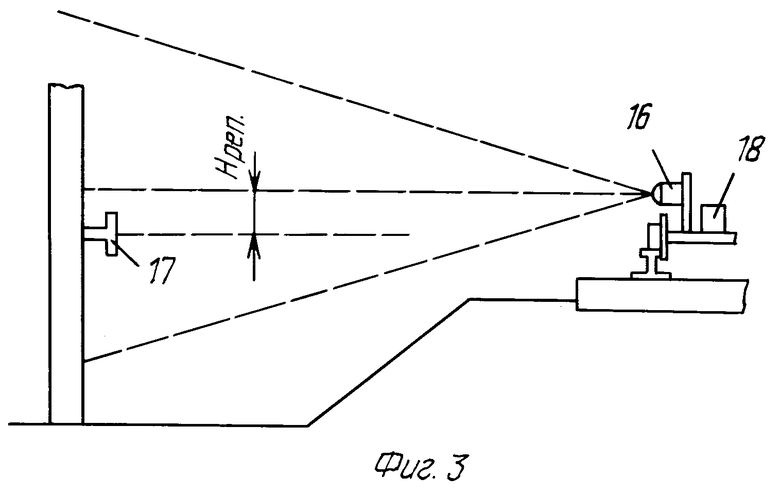
На фиг.1 схематично изображено устройство для выправки железнодорожного пути, вид сбоку. На фиг.2 - то же, вид сверху (или путевая машина, вид сверху, схематично). На фиг.3 - репер с расположенным напротив него устройством для автоматического определения положения пути относительно репера.
Устройство для выправки железнодорожного пути может быть установлено (смонтировано) на измерительном вагоне, машине для выправки железнодорожного пути, на щебнеочистительной машине, на машине для срезки балласта железнодорожного пути, кюветоочистительной машине, то есть на соответствующей железнодорожной путевой машине, при работе которой необходимо определить фактическое положение пути и установить его в проектное положение, определить уровень площадки балластной призмы и необходимое количество выгружаемого щебня, уклон и глубину кювета и пр.
Измерительное устройство может быть установлено (смонтировано) на путеизмерительном вагоне для измерения фактического положения пути относительно реперов и расчета его положения с учетом измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню между реперами в неподвижной системе координат, сравнения результатов измерения и расчета с проектным положением в неподвижной системе координат и формирования в соответствии с этим программных заданий по сдвижкам и/или подъемкам пути устройству для выправки железнодорожного пути соответствующей путевой машины. Эти программные задания могут быть переданы устройству для выправки пути или путевой машине с этим устройством, например, на магнитном носителе (дискете).
Путевая машина содержит раму 1, опирающуюся на ходовые тележки, и устройство для выправки железнодорожного пути, смонтированное на раме 1 и включающее в себя подъемно-рихтовочное устройство 20 (ПРУ) и соединенное с ним измерительное устройство. Измерительное устройство содержит датчик 2 пройденного пути, смонтированный на раме 1, измерительные тележки 3, 4, 5 и 6, установленные на раме 1 с возможностью подъема и опускания приводами. Между тележками 6 и 5 и/или 3 и 5 натянут рихтовочный трос 7, относительно которого измеряют стрелы изгиба пути в плане с помощью датчика 8 или датчика 9. Между тележками 3 и 5 натянуты нивелировочные тросы 10 и 11, относительно которых измеряют стрелы прогиба пути в продольном профиле с помощью датчиков 12 и 13. Рихтовочный трос 7 и нивелировочные тросы 10 и 11 образуют базы измерительного устройства. Датчики 8 и 9 стрел изгиба пути в плане, датчики 12 и 13 стрел прогиба пути в продольном профиле позволяют измерить криволинейность пути в плане и в продольном профиле относительно соответствующей базы измерительного устройства. На нивелировочной тележке 14 установлен датчик 15 измерения положения пути по уровню. На обочине пути размещены реперы 17. Измерительное устройство также включает в себя устройство для автоматического определения положения пути относительно соответствующего репера 17. Устройство для автоматического определения положения пути относительно репера 17 состоит из установленных на тележке 5 датчика 16, измеряющего фактическое положение пути в горизонтальной и вертикальной плоскостях относительно репера 17, и датчика 18 уровня, например инклинометра, измеряющего положение пути по уровню. Датчик 16 автоматически измеряет расстояние и высоту фактического положения пути относительно положения марки, расположенной на репере 17 в этом сечении. Марка может быть выполнена в виде креста, круга, квадрата или другой геометрической фигуры, штрих-кода и прочее. Датчики 16 и 18 могут быть размещены на другой тележке, например на тележке 3 или 4.
Измерительное устройство содержит также промышленный компьютер 19, установленный на раме 1 путевой машины. Входы компьютера 19 соединены со всеми вышеупомянутыми датчиками, а выход - с подъемно-рихтовочным устройством 20 (ПРУ). Компьютер 19 имеет специальное программное обеспечение и базу данных о проектном положении пути относительно рабочих реперов 17 или других промежуточных пунктов в неподвижной системе координат, соответственно для рабочих реперов или указанных пунктов в системе глобального позиционирования, датчика 16, например оптико-электронного прибора, программу расчета положения пути относительно марки репера 17 в горизонтальной и вертикальной плоскостях и программу расчета положения пути в точках между реперами на основании дополнительной информации, получаемой от датчиков 8 или 9 стрел изгиба и/или датчиков 12 и 13 стрел прогиба и/или датчика 15 возвышения пути по уровню в неподвижной системе координат. Программное обеспечение выполнено таким образом, что устройство для выправки железнодорожного пути в реально возможном диапазоне нечувствительно к влиянию ряда факторов, в том числе - освещенности репера 17, незначительным перекосам марки на репере 17 и пр.
Криволинейность пути в плане и/или в продольном профиле можно измерить используя для этого вместо датчиков 8 или 9 измерения стрел изгиба пути в плане и/или датчиков 12 и/или 13 стрел прогиба пути в продольном профиле и/или датчика 15 положения пути по уровню датчик(и) измерения угла поворота рамы 1 путевой машины (путеизмерительного вагона) в горизонтальной, вертикальной и поперечной плоскостях, например гироскопический датчик.
Датчик 2 пройденного пути установлен на тележке 5, но он может быть установлен и в любом другом месте путевой машины или устройства для выправки железнодорожного пути.
Если в устройстве для выправки железнодорожного пути предполагается использование системы глобального позиционирования, например спутниковой системы (GPS), то в этом случае на путевой машине или на устройстве для выправки железнодорожного пути размещают вместо датчика 16 устройство для приема сигналов со спутников или промежуточных пунктов, связанных с системой глобального позиционирования.
Устройство для выправки железнодорожного пути, монтируемое на соответствующей путевой машине, или путевая машина, оснащенная таким устройством, работают следующим образом.
При подъезде к рабочему реперу 17 машина останавливается или перемещается с небольшой скоростью (3,0 км/час) и с помощью датчиков 16 и 18 осуществляется измерение криволинейности фактического положения пути в горизонтальной и вертикальной плоскостях (в плане и/или в продольном профиле и/или по уровню) относительно рабочего репера, полученное значение сравнивают с проектным положением пути в этом сечении, которое имеется в базе данных компьютера 19, рассчитывают и запоминают в компьютере 19 полученную разницу. Перемещают машину вдоль пути (со скоростью 5-10 км/час) к следующему реперу 17 и при этом в функции пройденного пути, измеряемого с помощью датчика 2, измеряют криволинейность пути в плане посредством измерения стрел изгиба пути в плане с помощью датчика 8 или 9 относительно базы измерительного устройства или углов поворота с помощью гироскопического датчика, измеряют криволинейность пути в продольном профиле посредством измерения стрел прогиба пути в продольном профиле с помощью датчиков 12 и 13 относительно базы измерительного устройства или углов наклона с помощью гироскопического датчика или инклинометра, измеряют положение пути по уровню с помощью, например, датчика 15 или датчика 18, например, инклинометра. Измеренные величины стрел изгиба и/или прогиба и/или возвышения пути по уровню, характеризующие криволинейность пути в плане, в продольном профиле и по уровню, передаются в компьютер 19, в котором вычисляют фактическое положение пути в неподвижной системе координат между рабочими реперами 17 или другими промежуточными пунктами с учетом измеренной криволинейности пути, фактического положения пути относительно реперов 17 и проектного положения пути в одной и той же системе координат (системе отсчета). Таким образом, в компьютере 19 вычисляются программные сдвиги и/или подъемки пути в плане и/или в продольном профиле и/или возвышения по уровню для управления подъемно-рихтовочным устройством 20 (ПРУ) и обеспечения установки пути в проектное положение в неподвижной системе координат. Эти программные задания, рассчитанные для каждой 4-ой - 5-ой шпалы, передаются в системы управления выправкой пути, установленные на выправочно-подбивочно-рихтовочных машинах типа ВПР (ВПРС), работающих в режиме сглаживания по методу фиксированных точек. Полученные программные задания могут быть также переданы в системы управления соответствующими рабочими органами, установленными на других путевых машинах.
Если выправочно-подбивочно-рихтовочная машина оснащена системой выправки пути и промышленным компьютером, позволяющим рассчитывать положение пути в относительной системе координат, то для этой системы достаточны измерения фактического положения пути и данные о проектном положении пути в местах расположения реперов, а в промежутке между реперами компьютер рассчитает сдвиги и/или подъемки пути и/или возвышения для обеспечения установки пути в проектное положение в неподвижной системе координат.
Заявленные изобретения обеспечивают повышение качества выправки пути с обеспечением установки его в заданное (проектное) положение в неподвижной системе координат, снижение материалоемкости и энергоресурсов для его эксплуатации за счет исключения специального измерительного вагона с соответствующим оборудованием и специальной тележки, повышение производительности работ по выправке пути за счет исключения персонала, необходимого для обслуживания специального измерительного вагона и специальной тележки, снижение потребного объема выправочных работ и пр. Кроме этого, реализация изобретений позволит получить достоверную информацию о положении пути в неподвижной системе координат при производстве и после выполнения различных видов ремонтов пути и планово-предупредительной выправки пути, правильно планировать очередность выправочных работ и потребность материалов, например щебня и пр.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| Способ выправки железнодорожного пути и устройство для его осуществления | 2023 |
|
RU2824765C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2454498C1 |
| Устройство управления выправкой железнодорожного пути | 1983 |
|
SU1116108A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ КОНТРОЛЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2009 |
|
RU2387561C1 |
Изобретения относятся к строительству и ремонту железнодорожного пути. Способ заключается в том, что измеряют положение пути относительно реперов в точках их расположения, определяют положение пути между реперами посредством измерения криволинейности пути в плане и/или в продольном профиле относительно базы измерительного устройства и/или измерения возвышения пути по уровню и расчета положения пути между реперами в неподвижной системе координат, определяют соответствующие величины сдвигов и/или подъемок пути по результатам сравнения измеренного и определенного положений пути с проектным и выправляют железнодорожный путь. Путевая машина содержит раму, опирающуюся на ходовые тележки, устройство для выправки железнодорожного пути, смонтированное на раме и включающее в себя подъемно-рихтовочное устройство и соединенное с ним измерительное устройство с устройством для автоматического определения положения пути относительно репера и компьютером. Изобретения направлены на повышение качества выправки пути с обеспечением установки его в заданное (проектное) положение. 4 с. и 1 з.п.ф-лы, 3 ил.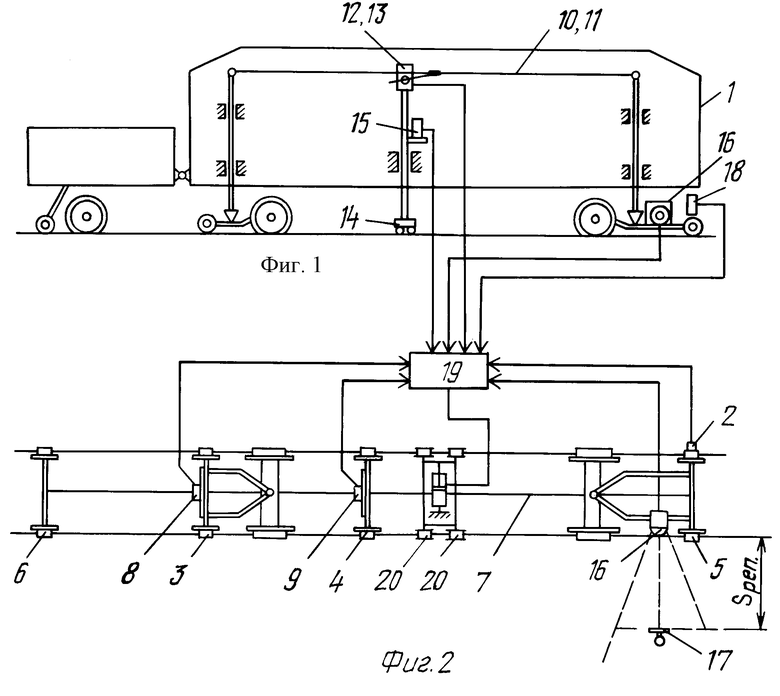
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| М.: Транспорт, 1995, с.9-12, 69-93 | |||
| Устройство для измерения угловой скорости | 1977 |
|
SU626415A1 |

