Изобретение относится к разделу управления и может быть использовано при регулировании параметров сложных электромеханических систем, например электроприводов постоянного тока, соединенных с объектом управления вязкоупругими кинематическими связями.
Известен «Автоматизированный электропривод постоянного тока» (патент РФ №2065660, МПК Н02 P 5/06, 1996), построенный по принципу подчиненного регулирования. Устройство содержит задатчик и датчик скорости, выходы которых подключены соответственно к суммирующему и вычитающему входам регулятора скорости, выходом подключенного к суммирующему входу регулятора тока, выход которого через усилитель мощности подключен к якорной обмотке двигателя, последовательно с которой включен датчик тока, а параллельно датчик напряжения, выход которого через блок выделения модуля подключен к первому входу блока перемножения, второй вход которого соединен с выходом датчика тока. Для повышения качества регулирования в широком диапазоне изменения нагрузок и управляющих воздействий в устройство дополнительно введен блок выделения максимального по модулю значения, первый и второй входы которого подключены к выходам соответственно блока перемножения и датчика тока, а выход подключен к вычитающему входу регулятора тока. При наличии на валу двигателя нагрузки меньше номинальной устройство выполняет свои основные функции. Но при необходимости введения ограничения координат, например тока, превышение указанного параметра сверх допустимого значения приводит к выходу из строя электрического двигателя. Следовательно, основным недостатком устройства является отсутствие возможности ограничения тока электродвигателя. Кроме этого работоспособность устройства нарушается при использовании его для управления объектом, связанным с электродвигателем упругими связями, например валопроводом с переменным моментом инерции, имеющим переменную жесткость и кинематические погрешности.
Известен «Электропривод постоянного тока с переменными параметрами механической части» (патент РФ №2070766, МПК Н02Р 5/06, 1996) с упругой механической связью между двигателем и механизмом с переменным моментом инерции, содержащий последовательно соединенные задатчик частоты вращения, второй регулятор частоты вращения, регулятор упругого момента, первый регулятор частоты вращения, регулятор тока, систему формирования импульсов и тиристорный силовой блок, подключенный к электродвигателю, датчик тока, датчик частоты вращения электродвигателя и механизма, первый пропорционально-дифференцирующий блок, вход которого соединен с выходом датчика тока, а выход с третьим входом регулятора тока, первый дифференцирующий блок, вход которого соединен с выходом датчика частоты вращения электродвигателя, а выход - с вторым входом регулятора тока, второй пропорционально-дифференцирующий блок, вход которого соединен с выходом датчика частоты вращения электродвигателя, а выход - с третьим входом первого регулятора частоты вращения, третий пропорционально-дифференцирующий блок, вход которого соединен с выходом датчика частоты вращения механизма, а выход - с третьим входом второго регулятора частоты вращения, пятый дифференцирующий блок, вход которого соединен с выходом датчика частоты вращения механизма, а выход - с вторым входом четвертого дифференцирующего блока, второй дифференцирующий, четвертый пропорционально-дифференцирующий, причем входы второго дифференцирующего и четвертого пропорционально-дифференцирующего блоков соединены с первым входом четвертого дифференцирующего блока, а выходы второго дифференцирующего, четвертого пропорционально-дифференцирующего и четвертого дифференцирующего блоков соединены соответственно с вторым входом первого регулятора частоты вращения, с третьим входом регулятора упругого момента и с вторым входом второго регулятора частоты вращения, третий дифференцирующий блок, выход которого соединен с вторым входом регулятора упругого момента, отличающийся тем, что в него введены датчик упругого момента и шестой дифференцирующий блок, первый и второй входы датчика упругого момента соединены с выходами соответственно датчика частоты вращения электродвигателя и датчика тока, а выход - с входом второго дифференцирующего блока, выход шестого дифференцирующего блока соединен с первым входом третьего дифференцирующего блока, второй вход которого соединен с выходом датчика частоты вращения электродвигателя. Когда нагрузка на валу электродвигателя не превышает номинальной устройство выполняет возложенные на него функции, но не обладает способностью токоограничения, что снижает его эксплуатационные возможности. Кроме этого при реализации требуется достаточно сложный датчик упругого момента.
Наиболее близкой к предлагаемому техническому решению является система управления электроприводом постоянного тока (статья Тарарыкин С.В., Тютиков В.В., Копылова Л.Г. «Формирование переходных процессов электропривода путем частотной коррекции контура токоограничения» // Вестник ИГЭУ, 2007, Вып.3), принятая за прототип. Она состоит из тиристорного преобразователя, через датчик тока соединенного с двигателем постоянного тока, который механически связан с первым датчиком скорости и через вязкоупругую передачу с исполнительным механизмом, задатчик интенсивности, выход которого подключен к неинвертирующему входу сумматора, инвертирующий вход сумматора соединен с электрическим выходом второго датчика скорости, механически соединенного с валом исполнительного механизма, выход первого сумматора через интегратор подключен к первому входу суммирующего усилителя, второй вход суммирующего усилителя через первый усилитель соединен с информационным выходом датчика тока, третий вход суммирующего усилителя через второй усилитель соединен с электрическим выходом первого датчика скорости, четвертый вход суммирующего усилителя через третий усилитель соединен со вторым датчиком скорости, выход суммирующего усилителя подключен к управляющему входу тиристорного преобразователя, а информационный выход датчика тока через нелинейный элемент контура токовой отсечки и линейный элемент контура токовой отсечки подключен к инвертирующему входу суммирующего усилителя, при этом линейный элемент контура токовой отсечки представлен последовательным соединением ПИ и ИД звеньев. Решая поставленные для него задачи в режимах «больших» отклонений координат, существенно повышая эффективность работы астатических систем, система управления имеет недостаток, связанный с тем, что техническая реализация интеграторов достаточно сложна. Это объясняется тем, что в процессе эксплуатации интегратор накапливает сигнал, что при цифровой реализации устройства может привести к необходимости запоминания им информации большого объема, а значит, и большой разрядности. Подтвердить данное утверждение можно результатами компьютерного моделирования электромеханической системы.
Для определенности примем следующие значения параметров объекта:
КСП=22 - коэффициент передачи силового преобразователя;
ТСП=0,008 с - постоянная времени силового преобразователя;
Ra=0,177 Ом - активное сопротивление якорной цепи двигателя постоянного тока;
Та=0,02 с - постоянная времени якорной цепи двигателя;
С=0,976 Вб - конструктивная постоянная двигателя постоянного тока;
ωн=220 рад/с - номинальная скорость двигателя постоянного тока;
Iн=30 А - номинальный ток двигателя постоянного тока;
J1=0,11 кг·м2 - момент инерции ротора двигателя постоянного тока;
k1=0,05 - коэффициент усиления первого усилителя;
k2=0,9 - коэффициент усиления второго усилителя;
k3=78,4 - коэффициент усиления третьего усилителя;
k5=1504 - коэффициент передачи интегратора;
kTO=200 - коэффициент передачи линейного элемента контура токовой отсечки;
τ1=0,007 с - постоянная времени ПИ звена линейного элемента контура токовой отсечки;
τ2=0,01 с - постоянная времени ИД звена линейного элемента контура токовой отсечки;
J2=0,56 кг·м2 - момент инерции исполнительного механизма;
k4=38,3 - коэффициент усиления четвертого усилителя (в прототипе входит в состав математической модели вязкоупругой передачи);
C12=14 Н·м/рад - приведенный коэффициент жесткости кинематической передачи;
b=0,22 Н·м - коэффициент внутреннего вязкого трения кинематической передачи.
Следует отметить, что величины коэффициентов k1, k2, k3, k4, k5 и kTO, а также постоянные времени получены путем синтеза параметров регулятора по методике, представленной в источнике-прототипе.
Пусть требуется обеспечить время нарастания переходной характеристики системы в линейной зоне ее работы не более 0,2 с при отсутствии перерегулирования по скорости исполнительного механизма и при отсутствии статической ошибки стабилизации его скорости. Эффективное ограничение тока электродвигателя необходимо поддерживать на уровне Iдоп=63 А (двукратное увеличение по сравнению с номинальным значением тока) в режимах его перегрузки.
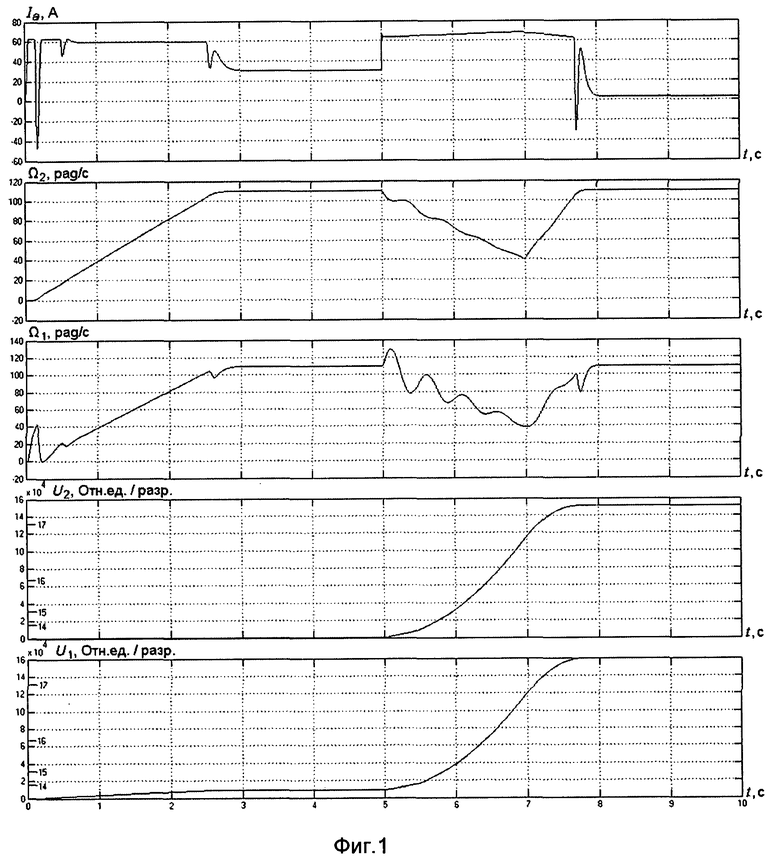
Результаты проведенного компьютерного моделирования рассматриваемого технического решения приведены на фиг.1. Они представлены переходными процессами тока I, скорости вала двигателя постоянного тока Ω1, скорости вала исполнительного механизма Ω2, сигнала на выходе интегратора U1 и сигнала на выходе ПИ звена (U2) в режимах:
- пуска исследуемой электромеханической системы с задатчиком интенсивности первого порядка и нелинейным контуром токоограничения на скорость, равную половине номинальной при наличии номинального момента на валу исполнительного механизма (от начала координат до t=5 с);
- последующего увеличения момента нагрузки до трехкратного номинального значения (в момент времени t=5 с);
- дальнейшего уменьшения нагрузки (при t=7 с) до значения Ia=0,1·Iнoм (режим малых токов).
Анализ полученных результатов указывает на то, что система справляется с задачей стабилизации скорости вращения вала исполнительного механизма при различных вариантах воздействия на него момента статического сопротивления. Однако на интервале времени от t=5 с до t=8 с (наброс нагрузки и снижение ее до значения Ia=0,1·Iнoм) в системе наблюдается резкое увеличение сигнала на выходе интегратора U1, который достигает в эксперименте на математической модели величины 1,6×105 относительных единиц. На правой части оси сигнала U1 с выхода интегратора приведены те значения разрядности цифрового блока, выполняющего функцию интегратора, которые необходимы для практической реализации устройства. Анализ сигнала U1 на фиг.1 показывает, что требуемая разрядность интегратора при его цифровой реализации достигает 18. Подобное поведение системы при выходе из режима перегрузки объясняется тем, что за время работы контура токовой отсечки (интервал времени от t=5 с до t=7 с) интегратор в главном контуре управления успевает накопить значительный по величине сигнал вследствие подавления контуром токовой отсечки на этом отрезке времени работы напряжения обратной связи основного контура регулирования скорости. На фиг.1 это хорошо заметно при анализе напряжения U1. То есть в режиме перегрузки (токовая отсечка включена) снижение скорости приводит к уменьшению сигнала обратной связи, действующей на входе интегратора, и чем продолжительнее перегрузочный режим, тем большее значение выходного сигнала накапливает интегратор. Тем самым активное накопление интегратором информации происходит в период действия контура токовой отсечки, когда главная обратная связь основного контура управления становится слабой. Следует особо отметить, что такое увеличение U1 наблюдается только при одном цикле наброса и сброса нагрузки. Если же такой цикл следует за первым, сигнал на выходе интегратора еще больше возрастает, что усугубляет проблему технической реализации интегратора. И чем чаще работает контур ограничения тока, тем больший сигнал накапливает интегратор.
Следовательно, использование технического решения, предложенного в прототипе, требует специальных мер, предотвращающих насыщение интегратора. Попытки реализовать устройство-прототип с интегратором, выполненным на операционном усилителе с ограничением выходного напряжения, не решают возникшей проблемы, поскольку уровень ограничения должен быть связан со скоростью, на которую разгоняется вал исполнительного механизма. То есть при разгоне на полную скорость величина напряжения, ограничивающего сигнал на выходе первого интегратора, должна быть одной, а при разгоне, например, на половинную скорость, ограничение должно быть скорректировано. Если же интегратор реализуется на цифровом принципе, явление накопления сигнала на выходе интегратора требует запоминания большого объема информации, что значительно усложняет схемотехнику регулятора.
Технический результат предлагаемого изобретения заключается в уменьшении разрядности интегратора при технической реализации устройства на цифровых элементах.
Такой результат достигается за счет того, что устройство, содержащее тиристорный преобразователь, через датчик тока, соединенный с двигателем постоянного тока, который механически связан с первым датчиком скорости и через кинематическую вязкоупругую передачу с исполнительным механизмом, на валу которого размещен второй датчик скорости, задатчик интенсивности, выход которого подключен к неинвертирующему входу сумматора, первый инвертирующий вход сумматора соединен с электрическим выходом второго датчика скорости, выход сумматора через интегратор подключен к первому входу суммирующего усилителя, второй вход суммирующего усилителя через первый усилитель соединен с информационным выходом датчика тока, третий вход суммирующего усилителя через второй усилитель соединен с электрическим выходом первого датчика скорости, четвертый вход суммирующего усилителя через третий усилитель подключен к выходу второго датчика скорости, информационный выход датчика тока через последовательно соединенные нелинейный элемент, интегрально-дифференциальное звено и линейный элемент соединен с инвертирующим входом суммирующего усилителя, выход которого подключен к управляющему входу тиристорного преобразователя, дополнительно имеет пропорциональное звено, выход линейного элемента соединен со входом пропорционального звена, а выход пропорционального звена подключен к второму инвертирующему входу сумматора, причем пропорциональное звено имеет передаточный коэффициент  ,
,
где K5 - коэффициент усиления интегратора;
τ1 - постоянная времени интегрально-дифференциального звена.
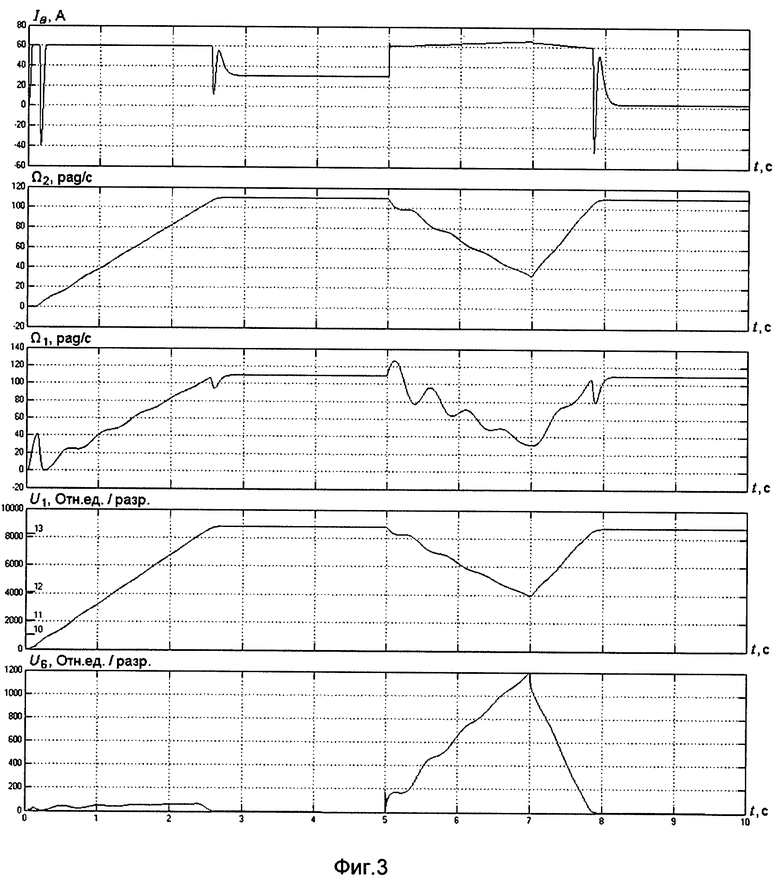
На фиг.2 изображена блок-схема устройства для автоматического управления электромеханической системой, на фиг.3 приведены результаты компьютерного моделирования работы устройства, на фиг.4 представлена передаточная характеристика нелинейного элемента контура токовой отсечки.
Для фиг.2 введены следующие обозначения: 1 - тиристорный преобразователь, который, получая синусоидальное входное напряжение Uc от сети, формирует регулируемое напряжение U, через датчик тока 2 поступающее на якорную обмотку двигателя постоянного тока 3 независимого возбуждения. Двигатель постоянного тока 3 механически связан с первым датчиком скорости 4 и через кинематическую вязкоупругую передачу 5 - с исполнительным механизмом 6. Исполнительный механизм оснащен вторым датчиком скорости 7. Величина скорости вращения вала двигателя постоянного тока 3 обозначена на фиг.2 как Ω1, измеряется первым датчиком скорости 4 и преобразуется им в напряжение UΩ1, пропорциональное скорости вращения двигателя постоянного тока 3. Величина скорости вращения вала исполнительного механизма 6 обозначена на фиг.2 как Ω2, измеряется вторым датчиком скорости 7 и преобразуется им в напряжение UΩ2, пропорциональное скорости вращения вала исполнительного механизма 6. Задатчик интенсивности 8, работающий под управлением входного задающего напряжения UΩ3, формирует закон изменения во времени напряжения UΩ3(t), определяющий темп его нарастания в режиме пуска и регулирования. Выход задатчика интенсивности 8 соединен с неинвертирующим входом сумматора 9, первый инвертирующий вход которого соединен с электрическим выходом второго датчика скорости 7. Сюда поступает напряжение UΩ2. Выход сумматора 9 (напряжение ΔU) через интегратор 10 (имеющий передаточную функцию  , где S - комплексный оператор Лапласа) в виде напряжения U1 подключен к первому входу суммирующего усилителя 11, второй вход суммирующего усилителя 11 через первый усилитель 12 (его коэффициент усиления - K1) соединен с информационным выходом датчика тока 2, формирующим напряжение Ui, пропорциональное току якорной обмотки двигателя постоянного тока 3. При этом напряжение на выходе первого усилителя 12 обозначено на фиг.2 как U2. Третий вход суммирующего усилителя 11 через второй усилитель 13, обладающий коэффициентом усиления К2 (на фиг.2 - напряжение U3), соединен с электрическим выходом первого датчика скорости 4 (на фиг.2 - напряжение UΩ1). Четвертый вход суммирующего усилителя 11 (напряжение U4) через третий усилитель 14 с коэффициентом усиления К3 подключен к выходу второго датчика скорости 7 (на фиг.2 - напряжение UΩ2). Выход суммирующего усилителя 11 подключен к управляющему входу тиристорного преобразователя 1 в виде напряжения UУ. Кроме этого информационный выход датчика тока 2 в виде напряжения Ui через нелинейный элемент 15 контура токовой отсечки (Uнэ) и интегрально-дифференциальное звено 16 с передаточной функцией
, где S - комплексный оператор Лапласа) в виде напряжения U1 подключен к первому входу суммирующего усилителя 11, второй вход суммирующего усилителя 11 через первый усилитель 12 (его коэффициент усиления - K1) соединен с информационным выходом датчика тока 2, формирующим напряжение Ui, пропорциональное току якорной обмотки двигателя постоянного тока 3. При этом напряжение на выходе первого усилителя 12 обозначено на фиг.2 как U2. Третий вход суммирующего усилителя 11 через второй усилитель 13, обладающий коэффициентом усиления К2 (на фиг.2 - напряжение U3), соединен с электрическим выходом первого датчика скорости 4 (на фиг.2 - напряжение UΩ1). Четвертый вход суммирующего усилителя 11 (напряжение U4) через третий усилитель 14 с коэффициентом усиления К3 подключен к выходу второго датчика скорости 7 (на фиг.2 - напряжение UΩ2). Выход суммирующего усилителя 11 подключен к управляющему входу тиристорного преобразователя 1 в виде напряжения UУ. Кроме этого информационный выход датчика тока 2 в виде напряжения Ui через нелинейный элемент 15 контура токовой отсечки (Uнэ) и интегрально-дифференциальное звено 16 с передаточной функцией  (на фиг.2 напряжение U5), а также линейный элемент 17 с коэффициентом усиления Кто (на фиг.2 U6) подключен к инвертирующему входу суммирующего усилителя 11. Передаточная характеристика нелинейного элемента 15 представлена на фиг.4 и иллюстрирует вид зависимости Uнэ от тока I (вид характеристики - «зона нечувствительности»). В свою очередь, пропорциональное звено 18, обладающее передаточным коэффициентом
(на фиг.2 напряжение U5), а также линейный элемент 17 с коэффициентом усиления Кто (на фиг.2 U6) подключен к инвертирующему входу суммирующего усилителя 11. Передаточная характеристика нелинейного элемента 15 представлена на фиг.4 и иллюстрирует вид зависимости Uнэ от тока I (вид характеристики - «зона нечувствительности»). В свою очередь, пропорциональное звено 18, обладающее передаточным коэффициентом  и получающее информацию от линейного элемента 17 в виде напряжения U6, подключено к второму инвертирующему входу сумматора 9. Напряжение на выходе пропорционального звена 18 обозначено на фиг.2 как U7.
и получающее информацию от линейного элемента 17 в виде напряжения U6, подключено к второму инвертирующему входу сумматора 9. Напряжение на выходе пропорционального звена 18 обозначено на фиг.2 как U7.
Назначение пропорционального звена 18 заключается в следующем. ПИ-звено в контуре токовой отсечки устройства-прототипа, имеющее передаточную функцию  , можно представить в виде параллельного соединения двух звеньев - безынерционного единичного коэффициента усиления и интегратора с передаточной функцией
, можно представить в виде параллельного соединения двух звеньев - безынерционного единичного коэффициента усиления и интегратора с передаточной функцией  . Воспользовавшись правилами эквивалентных структурных преобразований, можно перенести задержанную обратную связь по току, содержащую интегрирующий элемент
. Воспользовавшись правилами эквивалентных структурных преобразований, можно перенести задержанную обратную связь по току, содержащую интегрирующий элемент  , со входа суммирующего усилителя 11, управляющего тиристорным преобразователем 1, на вход сумматора 9, подающего сигнал на вход интегратора 10, обладающего передаточной функцией
, со входа суммирующего усилителя 11, управляющего тиристорным преобразователем 1, на вход сумматора 9, подающего сигнал на вход интегратора 10, обладающего передаточной функцией  и обеспечивающего астатизм основного регулятора. При этом с учетом коэффициента усиления К5 интегратора 10 основного контура необходимо скорректировать коэффициент усиления этой перенесенной параллельной ветви контура токовой отсечки, который следует разделить на K5. Таким образом, получаем скорректированный коэффициент усиления перенесенной параллельной ветви контура токовой отсечки (передаточный коэффициент пропорционального звена 18) в виде
и обеспечивающего астатизм основного регулятора. При этом с учетом коэффициента усиления К5 интегратора 10 основного контура необходимо скорректировать коэффициент усиления этой перенесенной параллельной ветви контура токовой отсечки, который следует разделить на K5. Таким образом, получаем скорректированный коэффициент усиления перенесенной параллельной ветви контура токовой отсечки (передаточный коэффициент пропорционального звена 18) в виде  . Безынерционный единичный коэффициент усиления (вторая параллельная ветвь ПИ-звена контура токовой отсечки) ничего не меняет в структуре контура токовой отсечки, и напряжение U6, как и ранее, приходит на инвертирующий вход суммирующего усилителя 11, управляющего тиристорным преобразователем 1.
. Безынерционный единичный коэффициент усиления (вторая параллельная ветвь ПИ-звена контура токовой отсечки) ничего не меняет в структуре контура токовой отсечки, и напряжение U6, как и ранее, приходит на инвертирующий вход суммирующего усилителя 11, управляющего тиристорным преобразователем 1.
Указанное преобразование позволяет совместить в пропорциональном звене 18 интегральные части основного регулятора и регулятора контура токоограничения. При этом сохраняются характер и качество переходных процессов по току и скоростям первой и второй масс рассматриваемой системы, и они оказываются аналогичными процессам управления в системе без выполнения дополнительных структурных изменений. Однако теперь сигнал на входе интегратора 10 в случае снижения величины UΩ2 и повышении тока якоря двигателя постоянного тока 3 сверх заданной величины не увеличивается так, как в прототипе. Это объясняется тем, что появляющееся напряжение U7, приходящее на второй инвертирующий вход сумматора 9 от пропорционального звена 18, уменьшает величину ΔU. Интегратор не накапливает сигнал на своем выходе, величина U1 на выходе интегратора ограничивается и по форме определяется сигналом со второго датчика скорости 7 исполнительного механизма 6.
Устройство автоматического управления электромеханической системой с вязкоупругой кинематической связью работает следующим образом. В начальный момент пуска электропривода до скорости вращения в половину от номинальной на вход задатчика интенсивности 8 подают напряжение UΩ3, величина которого определяет интенсивность разгона двигателя постоянного тока 3 и исполнительного механизма 6. Задатчик интенсивности 8 меняет напряжение UΩ3(t) на своем выходе линейно, обеспечивая необходимую стабильность заданного переходного процесса пуска и ограничивая величину тока якорной обмотки двигателя постоянного тока 3 в нашем случае на уровне 60 А. При этом скорости вращения Ω1 двигателя постоянного тока 3 и Ω2 исполнительного механизма 6 начинают возрастать с нуля, и датчики скорости первый 4 и второй 7 в начальный момент вырабатывают на своих выходах напряжения UΩ1=0 и UΩ2=0, что обеспечивает появление напряжения ΔUΩ на входе интегратора 10. Поскольку ток I двигателя постоянного тока 3 в начальный момент времени нулевой, напряжение Ui, снимаемое с информационного выхода датчика тока 2, также нулевое, контур токовой отсечки, представленный нелинейным элементом 15, интегрально-дифференциальным звеном 16 и линейным элементом 17 не вступает в действие. Следовательно, интегратор 10 начинает интегрировать величину ΔU с нулевого значения. Суммирующий усилитель 11, основная функция которого - учет величины всех обратных связей устройства, напряжения на соответствующие входы которого поступают от датчиков с заранее выбранными коэффициентами (за это отвечают усилители с первого по третий), вырабатывает напряжение Uy, которое, будучи поданным на управляющий вход тиристорного преобразователя 1, увеличивает напряжение U, подаваемое на якорную обмотку двигателя постоянного тока 3. Тот, в свою очередь, разгоняется и меняет скорость вращения Ω1. За счет кинематической вязкоупругой передачи 5 это изменение передается на вал исполнительного механизма 6. Из-за вязкоупругих свойств кинематической передачи 5 скорости Ω1 и Ω2 могут быть не равны. На этапе разгона двигателя постоянного тока 3 и исполнительного механизма 6 (временной интервал от 0 до 5 с) в устройстве наблюдается значительное увеличение тока I якорной обмотки. При этом задатчик интенсивности 8 настраивается таким образом, чтобы в процессе пуска (интервал от 0 до 2,5 с) ток I стремился к величине 60 А. Если же происходит превышение указанной величины, вступает в действие токовая отсечка. Как только величина тока якоря двигателя постоянного тока 3 превысит значение 63 А, установленное характеристикой нелинейного элемента 15 (фиг.4), последовательно соединенные нелинейный элемент 15, интегрально-дифференциальное звено 16 и линейный элемент 17 начинают вырабатывать сигнал обратной связи по току U6, который поступает на инвертирующий вход суммирующего усилителя 11. Поскольку обратная связь по току, как и все, заведенные на соответствующие входы суммирующего усилителя 11 от датчиков обратные связи, отрицательна, указанные контуры воздействуют на тиристорный преобразователь 1 и на напряжение якорной цепи двигателя постоянного тока 3 так, что стремятся стабилизировать измеренные датчиками 2, 4 и 7 параметры. Для тока I это приводит к тому, что на временной диаграмме фиг.3 наблюдается участок стабилизации тока (интервал 0.3-2.5 с). Величина U7, образующаяся на выходе пропорционального звена 18, определяемая величиной U6, приведенной на фиг.3 и передаточным коэффициентом пропорционального звена 18, незначительна. Поэтому влияние данной обратной связи сказывается на интенсивности разгона несущественно. Переходные процессы скоростей Ω1 двигателя постоянного тока 3 и Ω2 исполнительного механизма 6 практически не отличаются от переходных процессов прототипа (фиг.1).
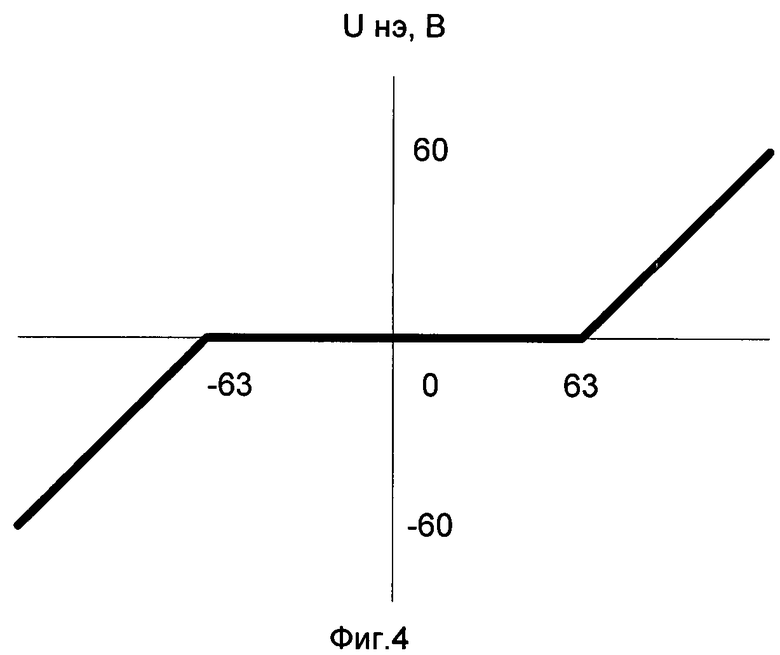
Анализ временной диаграммы выходного напряжения U1 интегратора 10 по фиг.3 указывает на то, что на этапе разгона двигателя это напряжение не превышает 8,5×103 относительных единиц, как и в прототипе.
В дальнейшем при отработке управляющих и возмущающих воздействий, перечень и порядок приложения которых такой же, как и для устройства-прототипа, вступают в работу все обратные связи, аналогично процессам, представленным в режиме пуска. Согласно фиг.3, на которой приведены временные зависимости тока I, скорости вала двигателя постоянного тока Ω1, скорости вала исполнительного механизма Ω2, сигнала на выходе интегратора U1 и сигнала на выходе линейного блока U6, полученные в результате компьютерного моделирования устройства в тех же режимах, что и для устройства-прототипа, никаких изменений в динамике первых трех из указанных параметров не происходит. Иначе говоря, показатели качества переходных процессов для исполнительного механизма 6 и двигателя постоянного тока 3 остаются такими же высокими, как и в исходном варианте. Анализ же временной диаграммы переходного процесса для сигнала U1 на выходе интегратора 10 указывает на значимые отличия от прототипа, особенно заметные на временном интервале 5-8 с. На этом этапе наброс нагрузки приводит к превышению током величины 63 А. За счет снижения скорости вращения исполнительного механизма величина UΩ2 снижается. Однако задатчик интенсивности, отработавший процесс пуска, поддерживает на неинвертирующем входе сумматора 9 постоянное напряжение UΩ(t), которое после окончания переходного процесса пуска неизменно. Следовательно, разница (UΩ3(t)-UΩ2) начинает возрастать, как и в прототипе, но в отличие от него на втором инвертирующем входе сумматора 9 с выхода пропорционального звена 18 появляется напряжение U7, определяемое величиной сигнала U6, что снижает разность ΔU до величины (UΩ3(t)-UΩ2-U7). Как показано на временной диаграмме фиг.3 после срабатывания нелинейного элемента 15, настроенного на величину 63 А, за счет интегрально-дифференциального звена 16 величина U6 увеличивается, а значит, пропорционально ей растет и U7. Это приводит к снижению ΔU, величина U1 на интервале от 5 до 7 секунды снижается, чрезмерного накопления информации на выходе интегратора 10 не происходит. При сбросе нагрузки (интервал 7-8 с) скорость исполнительного механизма 6 начинает возрастать, UΩ2 растет, но при этом снижается величина U6, а значит, и пропорциональная ей U7. Это объясняется тем, что интегрально-дифференциальное звено 16, отрабатывая величину сигнала UНЭ, уменьшает напряжение U5 на своем выходе. Разность (UΩ3(t)-UΩ2-U7) начинает возрастать, напряжение U1 увеличивается. Поскольку на этом этапе напряжение U7 все еще присутствует на втором инвертирующем входе сумматора 9, накопленный сигнал U1 на выходе интегратора 10 в данном режиме достигает только значения 8,5*103 относительных единиц. Это почти в 20 раз меньше того значения (1,6×105 относительных единиц), которое было получено при моделировании работы устройства-прототипа на аналогичном временном интервале. При этом повторные набросы и следующие за ними уменьшения нагрузки не приводят к накоплению сигнала интегратором 10.
Таким образом, удается избежать продолжительного интегрирования входной информации и, в конечном счете, переполнения элементов памяти, на которых реализуется интегрирующая часть устройства. Подобные процессы никаким образом не отражаются на качестве переходных процессов устройства по регулируемым параметрам. Если провести сравнение переходных процессов для выходных сигналов интеграторов заявляемого устройства и прототипа с учетом того, что, как и при анализе переходных процессов в прототипе, на правой части оси сигналов U1 с выхода интегратора на фиг.3 указаны значения разрядности цифрового блока, выполняющего функцию интегратора, можно сделать вывод о том, что в данном варианте реализации разрядность интегратора снижается до 14, что на 4 разряда меньше, чем в прототипе.
Тем самым предлагаемое техническое решение позволяет уменьшить разрядность интеграторов при технической реализации устройства на цифровых элементах.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА ДЛЯ УПРАВЛЕНИЯ ОБЪЕКТОМ С УПРУГИМИ СВЯЗЯМИ | 2011 |
|
RU2489797C1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
| Устройство управления электроприводом регулятора подачи долота | 1987 |
|
SU1452944A1 |
| Устройство для автоматизированного управления электроприводом экскаватора-драглайна | 1983 |
|
SU1145093A1 |
| Электропривод переменного тока | 1986 |
|
SU1332506A1 |
Изобретение относится к области электротехники и может быть использовано при регулировании параметров сложных электромеханических систем, например электроприводов постоянного тока, соединенных с объектом управления вязкоупругой кинематической передачей. Технический результат заключается в уменьшении разрядности интегратора при технической реализации на цифровых элементах. Устройство для автоматического управления электромеханической системой с вязкоупругой кинематической связью содержит тиристорный преобразователь, датчик тока, задатчик интенсивности, сумматор, интегратор, первый и второй датчики скорости, суммирующий усилитель, нелинейный и линейный элементы контура токовой отсечки, интегрально-дифференциальное звено, три усилителя. Кроме этого в него введено пропорциональное звено, подключенное к входу сумматора и имеющее передаточную функцию  , где К5 - коэффициент усиления интегратора; τ1 - постоянная времени интегрально-дифференциального звена. 4 ил.
, где К5 - коэффициент усиления интегратора; τ1 - постоянная времени интегрально-дифференциального звена. 4 ил.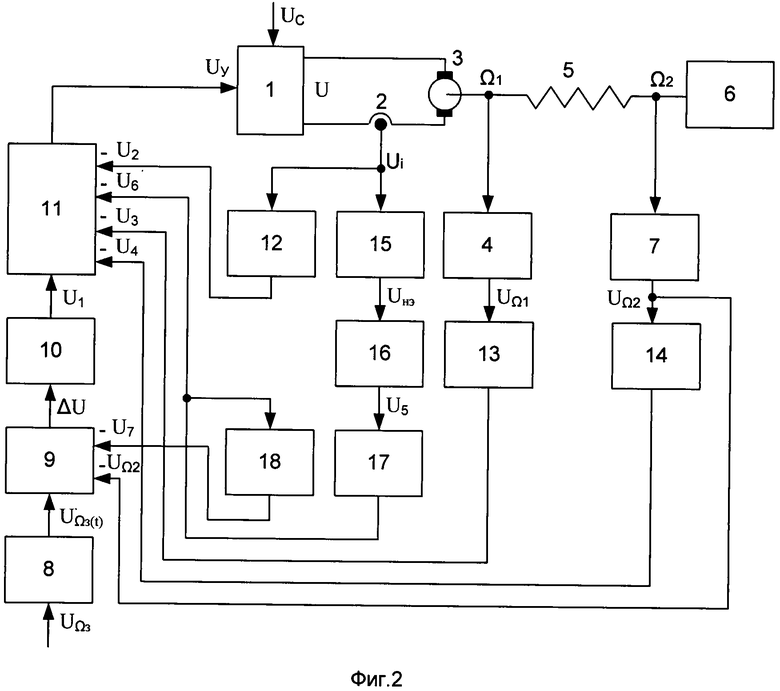
Устройство для управления электромеханической системой с вязкоупругой кинематической связью, содержащее тиристорный преобразователь, через датчик тока соединенный с двигателем постоянного тока, который механически связан с первым датчиком скорости и через кинематическую вязкоупругую передачу с исполнительным механизмом, на валу которого размещен второй датчик скорости, задатчик интенсивности, выход которого подключен к неинвертирующему входу сумматора, первый инвертирующий вход сумматора соединен с электрическим выходом второго датчика скорости, выход сумматора через интегратор подключен к первому входу суммирующего усилителя, второй вход суммирующего усилителя через первый усилитель соединен с информационным выходом датчика тока, третий вход суммирующего усилителя через второй усилитель соединен с электрическим выходом первого датчика скорости, четвертый вход суммирующего усилителя через третий усилитель подключен к выходу второго датчика скорости, информационный выход датчика тока через последовательно соединенные нелинейный элемент, интегрально-дифференциальное звено и линейный элемент соединен с инвертирующим входом суммирующего усилителя, выход которого подключен к управляющему входу тиристорного преобразователя, отличающееся тем, что в него введено пропорциональное звено, выход линейного блока соединен со входом пропорционального звена, а выход пропорционального звена подключен ко второму инвертирующему входу сумматора, причем пропорциональное звено имеет передаточную функцию  ,
,
где К5 - коэффициент усиления интегратора;
τ1 - постоянная времени интегрально-дифференциального звена.
| ВЕКТОРНЫЙ СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ | 1998 |
|
RU2144729C1 |
| RU 2066087 C1, 27.08.1996 | |||
| КАССЕТА ДЛЯ БЕСКОНЕЧНОЙ ЛЕНТЫ (ИЛИ ПРОВОЛОКИ) | 1940 |
|
SU67796A1 |
| Электропривод постоянного тока | 1989 |
|
SU1760622A1 |
| Винтовой питатель | 1986 |
|
SU1364568A1 |
| US 3947742 A, 30.03.1976 | |||
| СПОСОБ ПОЛУЧЕНИЯ ДИЕТИЧЕСКОГО КИСЛОМОЛОЧНОГО ПРОДУКТА | 1996 |
|
RU2108726C1 |
| DE 4427697 A1, 16.02.1995 | |||
| JP 2003058213 A, 28.02.2003. | |||

