Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к преобразующему оборудованию и, более конкретно, к управлению преобразующим оборудованием для подборки листов материала и автоматического наполнения ими конвертов.
Уровень техники
Известно преобразующее оборудование для автоматического наполнения конвертов. Такое оборудование может включать в себя компоненты для подачи предварительно отпечатанного полотна бумаги для резки этого полотна на один или более отдельных листов для подборки листов и для подачи таких отдельных листовых подборок в конверты. Такое оборудование может дополнительно включать в себя компоненты для передачи заполненных конвертов в заданное местоположение. В промышленности давно известны многочисленные устройства, которые выполняют эти и другие функции. Однако в тех случаях, когда существуют большие объемы листов бумаги, а также необходима высокая скорость, не ухудшая надежность, точность и качество конечного продукта, существует потребность в усовершенствованиях.
Более конкретно, в отдельных областях большого рулона бумаги обычно осуществляется печать конкретной информации. То есть исходный рулон бумаги содержит большое количество отдельных областей с уже отпечатанной конкретной знаковой информацией, причем каждая отдельная зона образует то, что в конечном счете содержит единичную страницу или лист с конкретной знаковой информацией. При усложнении этого процесса различное количество листов с относящимися знаками должны быть помещены в конверты так, чтобы содержимое одного конверта менялось от одного содержимого к другому числом листов и, конечно, конкретными знаками на включенных листах. В качестве одного примера, для финансовых отчетов множества заказчиков или деталей счета может потребоваться отрезание различного числа листов, соответствующих заказчикам или счетам, соответственно подборка, раскладка и выдача для доставки. Таким образом, содержимое любого конверта включает в себя либо единственный лист, либо "подборку" из двух или больше листов, причем каждая "подборка" является индивидуальной в качестве почты, отправляемой к конкретному адресату.
В таких примерных операциях финансовое учреждение может отправлять информацию об оборотах по счету или счет каждому из его заказчиков. Для информации об оборотах по счету или "знаков" для одного заказчика может потребоваться от одного итогового листа до некоторого количества листов, которые должны быть подобраны, а затем помещены в конверт этого заказчика. В то время как вся информация может быть отпечатана на отдельных областях, имеющих размер листа, в одном рулоне, эти области должны быть четко определены, разрезаны, объединены или подобраны в качестве листов для одного адресата или назначения, помещены в конверты, обработаны и выданы. Таким образом, система для выполнения этого процесса в прошлом имела соответствующие некоторые типичные компоненты, например стойку бумажного рулона, привод, листорезальное устройство, узел объединения, узел накопления или подборки, фальцмашину, самонаклад для конвертов, устройство для вкладки в конверты, а также конечный узел и узел выдачи. Для приведения в действие системы для взаимосвязи функций так, что правильные листы подбираются и помещаются в соответствующие конверты получателей, используются традиционные электронные блоки управления.
В таких традиционных системах скорость сквозного прохождения от бумажного рулона к готовому конверту зависит от скорости каждого компонента, а общая скорость производства является функцией от самого медленного или самого неэффективного компонента цепи. Подобным образом ограничивается и общая надежность. Более того, средний период времени простоя, начиная с любой неисправной работы или отказа в работе и кончая восстановлением, ограничивается компонентом, которому нужен самый продолжительный ремонт, или компонентом с самым затратным по времени обслуживанием. Такие традиционные системы требуют больших капиталовложений, сложной планировки расстановки и зоны обслуживания, а также требуют существенных рабочих ресурсов, материалов, а также потребности в обслуживании и ремонте.
Более того, управление традиционными системами часто является затратным и неэффективным. Например, традиционные системы, использующие системные шины, часто запускаются на шинах с небольшими скоростями и имеют потребность в использовании множества вычислительных систем со специализированной конфигурацией для приведения в действия множества компонентов. Более точно, использование множества вычислительных систем со специализированной конфигурацией увеличивает время ожидания органов управления работой традиционных систем, поскольку каждое сообщение любой вычислительной системе со специализированной конфигурацией принимается, преобразуется и обрабатывается каждой вычислительной системой со специализированной конфигурацией. Дополнительно использование множества вычислительных систем со специализированной конфигурацией увеличивает задержки связи на линии шины, увеличивает количество синхронизаций, требуемых для того, чтобы поддерживать работу множества вычислительных систем со специализированной конфигурацией на одной и той же скорости и в одном и том же периоде синхронизации, увеличивает общую сложность программного кода для приведения в действие традиционной системы и, таким образом, времени, требуемого для выполнения этого программного кода, и подвергается потерям времени обработки, касающимся передачи и приема сообщений, которые не адресованы конкретной вычислительной системе со специализированной конфигурацией, ее процессору и/или относящемуся к ней компоненту. Более того, использование вычислительных систем со специализированной конфигурацией приводит в результате к увеличенной вероятности отказа по причине потребности в дополнительных аппаратных средствах, потенциальной ненадежности специализированных компонентов, конфигураций и/или архитектур, а также потребности в использовании большого количества дорогих компонентов, конфигураций и/или архитектур. Например, каждый процессор каждой вычислительной системы со специализированной конфигурацией может быть сконфигурирован на специализированной плате со связанными вспомогательными компонентами (также возможно со специализированной конфигурацией), например памятью, контроллерами шины, контроллерами ввода/вывода, контроллерами памяти и т.д. Сложность и многочисленные аппаратные средства в свою очередь влияют на увеличение вероятности отказа таких традиционных систем.
Кроме того, традиционные системы могут быть неспособны обеспечить управление их операциями в реальном масштабе времени. Например, каждый модуль традиционной системы может придерживаться его собственных правил на основе типичных временных интервалов, требуемых для перемещения документа из первого местоположения во второе местоположение. В таких системах присущие неточности знания точного перемещения или местоположения конкретного документа являются причиной того, что управление конкретными компонентами системы построено на интервалах времени, что препятствует ее работе на больших скоростях. Дополнительно присущие неточности могут предотвратить отслеживание любого конкретного документа в пределах традиционной системы. Таким образом, ни точная работа традиционной системы, ни данные, ассоциированные с документами, обрабатываемыми в традиционных системах, не могут отслеживаться или управляться в реальном масштабе времени.
Соответственно, желательно обеспечить улучшенное устройство и соответствующий способ управления преобразующим оборудованием, которые решают описанные выше задачи традиционных систем.
Раскрытие изобретения
Варианты осуществления изобретения предлагают устройства для наполнения конвертов и способы управления ими. В соответствии с вариантом осуществления изобретения устройство включает в себя множество первичных приводов, множество датчиков, расположенных по всему устройству, и центральный контроллер. Множество первичных приводов, множество датчиков и центральный контроллер с возможностью рабочего взаимодействия связаны друг с другом таким образом, что центральный контроллер непосредственно принимает сигналы от множества датчиков и от множества первичных приводов для управления в реальном масштабе времени по меньшей мере одним первичным приводом из множества первичных приводов на основе определенного перемещения по меньшей мере одного отдельного листа материала, стопы отдельных листов материала или наполненного конверта по меньшей мере через участок устройства. В этих вариантах осуществления множество первичных приводов, множество датчиков и центральный контроллер могут быть выполнены с возможностью управляться и/или поддерживать связь посредством протокола EtherCAT®. Более точно протокол EtherCAT® может являться протоколом промышленной сети на основе Ethernet®, в котором устройства, поддерживающие EtherCAT®, читают данные, адресованные им в кадре, когда кадр проходит через устройство. Данные ввода от устройства, поддерживающего EtherCAT®, могут быть вставлены в кадр в момент, когда кадр проходит через устройство. Соответственно, устройство допускает управление перемещением ленты, отдельным листом материала или стопой таких материалов на основе напрямую полученных центральным процессором входных данных или данных, ассоциированных с перемещением отдельного листа материала, стопы отдельных листов материала или наполненного конверта, на основе которых принимается управляющее действие (например, корректирующее действие).
В некоторых вариантах осуществления предлагается способ для управления устройством, выполненным с возможностью наполнять конверты при помощи центрального контроллера такого типа, который включает в себя устройство обработки данных и память. Способ включает в себя множество первичных приводов устройства и множество датчиков устройства, соединенных с возможностью поддерживать связь с центральным контроллером, причем центральный контроллер принимает сигналы от множества первичных приводов и множества датчиков. Способ дополнительно включает в себя определение перемещения по меньшей мере одного отдельного листа материала, стопы отдельных листов материала, а также наполненного конверта по меньшей мере через один участок устройства и выборочное управление работой по меньшей мере одного первичного привода из множества первичных приводов в реальном масштабе времени на основе отслеженного перемещения.
Такие устройства и способы являются особенно эффективными в системах преобразования бумаги и наполнения конвертов, предлагающих улучшенные устройства и способы преобразования бумаги и конвертования листов, работающих на основе модульности и/или имеющих улучшенные устройства обработки бумаги, компоненты с сервоприводом, усовершенствованную плотность распределения датчиков, а также улучшенные принципы управления для управления работой системы. Один или более вариантов осуществления изобретения предлагают устройства и способы с улучшенной надежностью и скоростью преобразования бумаги и вкладывания листов, использующие множество устройств, поддерживающих EtherCAT®, выполненные с возможностью взаимодействовать с соответствующими участками устройства, при этом преимущественно не требуется принимать, интерпретировать и обрабатывать каждую часть каждого кадра. Более точно, устройства, поддерживающие EtherCAT®, взаимодействуют лишь с участком проходящего кадра, таким образом, скорость работы увеличивается, причем устройство управляется одной или несколькими вычислительными системами. Более того, использование этих устройств допускает управление работой устройства в реальном масштабе времени. Например, по меньшей мере участок устройства может отслеживаться в реальном масштабе времени для сравнения его работы с примерным виртуальным преобразователем, а также может отслеживаться на наличие изменений, которые могут указывать на будущее ухудшение и нестандартную работу. В ответ на такое отслеживание работа такого участка устройства или другого участка устройства может быть ускорена, замедлена или в противном случае остановлена.
В дополнение, один или более вариантов осуществления изобретения предполагают использование устройств, поддерживающих EtherCAT®, для того чтобы избежать использования специализированных вычислительных устройств для управления по меньшей мере одним компонентом устройства. Предпочтительнее, чтобы по меньшей мере один компонент устройства мог бы управляться напрямую посредством устройств, поддерживающих EtherCAT®, которые могут быть сконфигурированными лишь для преобразования данных в кадре, направленном к устройству, поддерживающему EtherCAT®, в электрическом сигнале, для его соответствующего по меньшей мере одного компонента для управления по меньшей мере одним компонентом. В некоторых вариантах осуществления по меньшей мере один компонент сам может быть устройством, поддерживающим EtherCAT®, таким образом, что он будет управляться напрямую. По этой причине некоторые или все устройства, поддерживающие EtherCAT®, могут быть серийными устройствами, которые являются заменяемыми в горячем режиме и автоматически конфигурируемыми, причем преимущественно будет предотвращено использование индивидуально изготовленных и затратных специализированных вычислительных систем и архитектур. Более того, в некоторых вариантах осуществления использование устройств, поддерживающих EtherCAT®, допускает централизованное управление устройством без множества синхронизированных сигналов, требуемых в различных частях устройства, таким образом, уменьшается не только сложность связи, а также сложность работы устройства.
Более того, один или более вариантов осуществления изобретения предлагают отслеживание информации, ассоциированной с документом, группой документов и/или наполненным конвертом, при прохождении таковых через устройство. По этой причине может быть выяснена информация, ассоциированная с любыми документами, обрабатывающимися в текущий момент или уже обработанными. Более точно, документы, группы и/или наполненные конверты, которые отличаются от других, могут быть обработаны должным образом в соответствии с ассоциированными с ними характеристиками. Например, первый документ может иметь первую толщину, а следовательно, быть ассоциированным с первой скоростью захвата документа (например, первой скоростью "захвата"), тогда как второй документ может иметь вторую толщину и, следовательно, быть ассоциированным со второй скоростью захвата. Подобным образом, первая группа документов может иметь первую толщину и, следовательно, быть ассоциированной с первой толщиной, при которой захватывается группа документов (например, первой "захватываемой" толщиной), тогда как вторая группа документов может иметь вторую толщину и, следовательно, быть ассоциированной со второй захватываемой толщиной.
Таким образом, в одном или более вариантах осуществления предлагается улучшенное устройство конвейерной доставки конвертов, которое может быть использовано в качестве модуля модульной системы по преобразованию бумаги и наполнению конвертов, вследствие чего понижается потребность в кадровых ресурсах, требуемом пространстве, эксплуатационных расходах, расходах на заработную плату и материалы, если сравнивать с подобной традиционной системой.
Более точно, такое улучшенное устройство и способы предлагают множество функциональных модулей, предоставляющих следующие последовательные функции в подобных модулях или в разнородных модулях, где отдельно взятый модуль является многофункциональным. Функции содержат:
- транспортировку/разматывание отпечатанной рулонной бумаги;
- разрезание бумаги в продольном и поперечном направлении;
- подборку и накопление листов;
- фальцевание листов;
- транспортировку для стыковки с вкладками;
- подачу конвертов;
- координирование подборки и преобразование и
- обработку и выдачу конверта.
Более точно, один или более аспектов изобретения могут предлагать без ограничения новое и уникальное устройство и способы для осуществления следующего:
a) направление бумаги или пленки, содержащей отпечатанные знаки, в устройство разрезания полотна;
b) обработку полотна посредством операции продольного и поперечного разрезания;
c) транспортировку и объединение отдельных элементов вкладок;
d) накопление предопределенных стоп отдельных элементов вкладок;
e) направление и транспортировку стопы отдельных элементов вкладок к зоне наполнения конвертов;
f) транспортировку индивидуальных конвертов по направлению к зоне наполнения конвертов;
g) создание и обработку стопы конвертов перед операцией по наполнению конвертов и
h) обработку индивидуального конверта из стопы конверта в зоне наполнения конверта.
Хотя объединения конкретных функций в конкретных модулях являются уникальными объединениями, изобретение данной заявки прежде всего направлено на устройства и способы, описанные в материалах настоящей заявки.
В общих словах, варианты осуществления изобретения предлагают улучшенное устройство преобразователя, которое является более быстрым и более надежным при более высокой производительности, чем у традиционных преобразователей. Более того, предотвращается использование множества специализированных вычислительных устройств, предоставляется централизованное управление без необходимости во множестве сигналов синхронизации и выполняется управление в реальном масштабе времени.
Эти и другие преимущества будут очевидными с учетом следующих фигур и подробного описания.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в состав и образуют часть этого описания изобретения, иллюстрируют варианты осуществления изобретения, а также совместно с общим описанием изобретения, изложенным выше, и детальным описанием вариантов осуществления, изложенным ниже, служат для разъяснения принципов изобретения.
Фиг.1 - вид в перспективе участка преобразователя для наполнения конвертов выбранными предметами из бумаги или пленки в соответствии с вариантами осуществления изобретения.
Фиг.2 - вид в перспективе дополнительных компонентов преобразователя согласно Фиг.1.
Фиг.3 - схематичный вид центрального контроллера для управления работой преобразователя согласно Фиг.1-2.
Фиг.4 - схематичный вид множества интерфейсов, включенных в модуль управления преобразователем центрального преобразователя согласно Фиг.3 для управления работой преобразователя согласно Фиг.1-2.
Фиг.5 - схематичный вид одного соединения множества устройств, поддерживающих EtherCAT®, в преобразователе согласно Фиг.1-2, которые поддерживают связь с центральным контроллером согласно Фиг.3.
Фиг.6 - схематичный вид дисплейного экрана, который может быть предусмотрен в составе центрального контроллера согласно Фиг.3 для управления работой преобразователя согласно Фиг.1-2.
Фиг.7 - вид в перспективе участка модуля фальцовки и буферизации, а также участка модуля сбора в преобразователе согласно Фиг.1-2.
Фиг.8 - вид в перспективе участка блока ориентации преобразователя согласно Фиг.1-2.
Фиг.9А - вид в перспективе участка блока ориентации согласно Фиг.8, когда конверт подвергается наклону вправо.
Фиг.9В - схематичный вид проекций сигналов от датчика, по меньшей мере части датчиков, включенных в конфигурацию блока ориентации согласно Фиг.8, которые иллюстрируют сигналы, которые могут указывать наклон вправо.
Фиг.10А - вид в перспективе участка блока ориентации согласно Фиг.8, когда конверт подвергается наклону влево.
Фиг.10В - схематичный вид проекций сигналов от датчика, по меньшей мере для части датчиков, включенных в конфигурацию блока ориентации согласно Фиг.8, которые иллюстрируют сигналы, которые могут указывать наклон влево.
Фиг.11А - вид в перспективе участка блока ориентации согласно Фиг.8, на котором конверт подвергается явному отскоку или явной задержке.
Фиг.11B - схематичный вид сигналов датчика, по меньшей мере от части датчиков, включенных в конфигурацию блока ориентации согласно Фиг.8, который иллюстрирует сигналы, которые указывают явный отскок и явную задержку.
Фиг.12 - вид в перспективе участка блока ориентации согласно Фиг.8, на котором конверт не обнаруживается датчиками, включенными в конфигурацию этого блока ориентации.
Фиг.13 - блок-схема, иллюстрирующая последовательность операций способа, которая может быть выполнена центральным контроллером согласно Фиг.3 для инициализации работы виртуального преобразователя.
Фиг.14А и Фиг.14В являются блок-схемами, иллюстрирующими последовательности операций, которые могут быть выполнены центральным контроллером согласно Фиг.3 для управления работой по меньшей мере участка преобразователя согласно Фиг.1-2.
Фиг.15 - блок-схема, иллюстрирующая последовательность операций, которая может быть выполнена центральным контроллером согласно Фиг.3 для определения необходимости коррекции работы по меньшей мере участка блока ориентации согласно Фиг.8 для коррекции наклона, задержки, отскока и/или их комбинаций.
Фиг.16 - блок-схема, иллюстрирующая последовательность операций, которая может быть выполнена центральным контроллером согласно Фиг.3 для остановки преобразователя согласно Фиг.1-2.
Фиг.17 - блок-схема, иллюстрирующая последовательность операций, которая может быть выполнена центральным контроллером согласно Фиг.3 для определения рабочих характеристик преобразователя согласно Фиг.1-2 на основе характеристик по меньшей мере одного отдельного листа материала и стопы листов материала.
Фиг.18 - блок-схема, иллюстрирующая последовательность операций, которая может быть выполнена центральным контроллером согласно Фиг.3 для отслеживания данных, связанных с документом, группой документов и/или наполненным или укомплектованным конвертом, двигающимися по преобразователю согласно Фиг.1-2.
Должно быть понятно, что прилагаемые чертежи не обязательно выполнены в масштабе и представляют довольно упрощенное представление различных предпочтительных признаков, иллюстрирующих основные принципы изобретения. Отдельные признаки в соответствии с вариантами осуществления изобретения, раскрытого в материалах настоящей заявки, включающие в себя, например, конкретные размеры, направления, расположения, последовательности операций и формы различных проиллюстрированных компонентов, будут определены отчасти конкретным предполагаемым применением, использованием и/или оборудованием. Конкретные признаки проиллюстрированных вариантов осуществления могут быть увеличены или изменены по отношению к другим для облегчения визуализации и четкости понимания.
Подробное описание
Данная заявка в целом относится к следующим находящимся в процессе одновременного рассмотрения заявкам США: порядковый номер 12/231,739 озаглавленная "Устройство для направления и разрезания ленточных продуктов и связанные способы"; порядковый номер 12/231,755, озаглавленная "Устройство для транспортировки и позиционирования и связанные способы"; порядковый номер 12/231,753, озаглавленная "Устройство вкладывания в конверты отдельных объектов и связанные способы"; порядковый номер 12/231,754, озаглавленная "Устройство для транспортировки отдельных листов в конверты и связанные способы"; порядковый номер 12/231,730, озаглавленная "Устройство транспортировки конвертов и связанные способы"; и порядковый номер 12/231,749, озаглавленная "Устройство для транспортировки ленточных продуктов и связанные способы", которые все поданы 9 сентября 2008 г. и в прямой форме включены в материалы настоящей заявки посредством ссылки во всей своей полноте. Данная заявка также в целом относится к следующим, совместно рассматриваемым международным патентным заявкам, поданным в тот же день, что и настоящая заявка, и раскрытия которых также в прямой форме включены в материалы настоящей заявки посредством ссылки во всей своей полноте: порядковый номер ____, озаглавленная "Устройство накопления отдельных бумажных или пленочных объектов и связанные способы", и порядковый номер ____, озаглавленная "Устройство транспортировки с компактными элементами и связанные способы".
В некоторых вариантах осуществления в соответствии с изобретением преобразователь, выполненный с возможностью преобразовывать полотно материала в отдельные документы для обработки и вкладывания в конверты, также выполнен с возможностью поддерживать связь с центральным контроллером посредством кадрированного сетевого протокола связи промышленной сети, такого как протокол EtherCAT®. Более точно, преобразователь сконфигурирован с множеством поддерживающих EtherCAT® устройств и управляется центральным контроллером для обработки по меньшей мере одного документа и вкладывания этого по меньшей мере одного документа по меньшей мере в один конверт на основе расположения и/или перемещения по меньшей мере одного документа или наполненного конверта через преобразователь. При использовании протокола EtherCAT® предполагается, что задержки в связи, присущие традиционной связи, по меньшей мере частично аннулируются. Более точно, традиционные системы для отправки информации (например, сообщения) к любому узлу имеют потребность в отправке ко всем узлам. Каждый узел индивидуально обрабатывает сообщение и, если требуется, отправляет ответ. Это имеет результатом множество сообщений за один цикл для узла, и типично требует перенаправления сообщений, пока они не достигнут узла, для которого предназначено это сообщение. Соответственно, существуют дополнительные затраты для поставки, обновления, поддержки и приведения в действия этого множества узлов в традиционных системах.
Представляется, что неблагоприятным является то, что отправка сообщений к множеству узлов также увеличивает среднее время ответа от узлов, поскольку любое сообщение задерживается, так как оно обрабатывается узлами, для которых это сообщение не предназначено. Таким образом, узел может тратить время на обработку сообщений, которые не предназначены для этого узла, перед тем как обработать сообщение, которое предназначено для этого узла. По этой причине не исключено, что для традиционных систем будет ограничиваться управление в реальном масштабе времени.
Предполагается, что предоставление преобразователя с устройствами, выполненными с возможностью поддерживать связь по меньшей мере посредством протокола EtherCAT®, сокращает количество передач, требуемых центральным контроллером, уменьшает пропускную способность, требуемую для передачи в преобразователе, и уменьшает количество ассоциированных программных средств и затрат для управления преобразователем. Дополнительно при использовании центрального контроллера, выполненного с возможностью управлять преобразователем посредством передач EtherCAT®, полагается, что преобразователь может управляться в реальном масштабе времени и может быть выполненным с возможностью приведения в действие на скорости от около 33000 штук выданных укомплектованных конвертов в час до около 40000 штук выданных укомплектованных конвертов в час. Более того, полагается, что соединение множества первичных приводов, множества датчиков и/или центрального контроллера посредством протокола EtherCAT® предоставляет способ управления преобразователем на основе определенного передвижения отдельного листа материала, стопы отдельных листов материала и/или наполненного конверта по меньшей мере через участок устройства.
Более точно, связь EtherCAT® обеспечивается по меньшей мере одним центральным контроллером, который может быть вычислительной системой, выполненной с возможностью поддерживать связь по высокоскоростной шине, которая в свою очередь поддерживает связь с отдельными устройствами, поддерживающими EtherCAT®. Однако для обращения ко всем устройствам вычислительная система отправит только одну передачу EtherCAT®. Эта передача может включать в себя данные для каждого из устройств, которые выполнены с возможностью отвечать только на их участок передачи EtherCAT®. По этой причине преобразователь выполнен с возможностью обеспечивать: контроль состояния в реальном масштабе времени, прием данных в реальном масштабе времени, открытый интерфейс с дополнительными протоколами, повышенные диагностические способности, межсетевую возможность подключения со способностью выходить на уровень ввода/вывода и без воздействия на процессор реального масштаба времени, интеграцию с цепью безопасности с протоколом EtherCAT® без уменьшенных затрат по причине простоты устройств EtherCAT®, а также уменьшенную стоимость поддержки посредством использования отключаемых в горячем режиме и подключаемых в горячем режиме устройств, поддерживающих EtherCAT®. Это, в свою очередь, позволяет производить корректирующие действия на основе операционных правил или предопределенных алгоритмов, которые для управления преобразователем могут задействовать информацию о размере, ориентации и/или расположении документа, группы документов и/или наполненного или укомплектованного конверта.
Со ссылкой на фигуры, а более конкретно на Фиг.1, проиллюстрирован участок примерного преобразователя 10 для обработки полотна 12 бумаги или пленки. Хотя это не показано, полотно 12, обрабатываемое преобразователем 10, берет начало, например, в рулоне (не показан) материала, содержащего такое полотно. Рулон обычно присоединяется к первому концу 14 преобразователя 10 и разматывается способом, известным в данной области техники, например приводом шпинделя, в который вставлен сердечник рулона, или контактом поверхности рулона с ленточным транспортером или подобным устройством. Типично полотно 12 имеет предварительно напечатанные на отдельных областях знаки.
Таким образом, полотно 12 перемещается в направлении обработки, в целом указанном стрелкой 15, через несколько модулей, которые образуют преобразователь 10. В примерном варианте осуществления Фиг.1 преобразователь 10 разрезает на отдельные (соответствующие "областям") листы материала ("вложения") и подает их в конверты, подающиеся в целом с противоположного конца 16 преобразователя 10. Преобразователь 10 может дополнительно передавать конверты, содержащие вкладки, от показанного участка преобразователя 10 для последующей обработки или выдачи. Примерный преобразователь 10 включает в себя, как отмечено выше, несколько модулей для выполнения отличных этапов по обработке полотна и полученных в результате вкладок, а также для обработки конвертов. Специалисты в данной области техники без труда примут во внимание, что преобразователь 10 может включать в себя другие модули в дополнение или взамен тех, которые показаны в материалах настоящей заявки.
Первым из показанных модулей, например, является режущий модуль 30, соответственно, ближайший к первому концу 14 преобразователя 10, который разрезает полотно 12 таким образом, как будет описано более подробно ниже. Режущий модуль 30 разрезает полотно на отдельные вкладки (например, документы) (не показаны) для последующей их обработки. Конвейерный модуль 40 контролирует и транспортирует документы, принятые от режущего модуля, и подает их в модуль 50 фальцовки и буферизации. В качестве альтернативы или дополнительно, модуль 50 фальцовки и буферизации может принимать вкладки из устройства для подачи листов (не показано), подающего предварительно нарезанные отдельные вкладки, т.е. отдельные вкладки, подаваемые к преобразователю 10 в их окончательной форме и которые не требуют разрезания режущим модулем 30. Модуль 50 фальцовки и буферизации способен обрабатывать отдельные вкладки и подавать их к следующему модулю в развернутом виде или, когда требуется, подавать их к следующему модулю в сфальцованном виде. Если необходимо, модуль 50 может формировать стопы документов для последующей обработки, например если данное производство требует наполнения конверта больше чем одним документом. Если требуется данным производством, модуль 50 фальцует документы вдоль продольной оси документов, в целом расположенных вдоль направления обработки. Более того, если требуется данным производством, модуль 50 накапливает, подбирает или помещает в буфер индивидуальные документы или группы документов в индивидуально отсортированных стопах.
Продолжая ссылаться на Фиг.1, модуль 60 сбора принимает документы или группы документов от модуля 50 фальцовки и буферизации и взаимодействует с самонакладами подачи вкладок для того, чтобы обеспечить вкладками документ или группы документов, если конкретное производство требует вкладок. Модуль сбора затем взаимодействует с компонентами модуля 70 наполнения для транспортировки одиночного документа, документов или групп документов и подачи их в конверты. В свою очередь конверты захватываются и подаются по направлению к модулю 70 наполнения конвейером 80 конвертов. Конвейерный узел 90 функционально соединен с модулем 70 наполнения и конвейером 80 конвертов для конвейерной транспортировки наполненных или укомплектованных конвертов в направлении от показанного участка преобразователя 10 для последующей обработки или выдачи.
Со ссылкой на Фиг.2 проиллюстрированы дополнительные компоненты примерного преобразователя 10. Конкретно, на Фиг.2 проиллюстрировано рабочее соединение конвейерного узла 90 с блоком 110 ориентации, который в свою очередь в рабочем порядке соединяется с загрузочным конвейером 120. Одно или более отводящие устройства 130 могут отводить наполненные или укомплектованные конверты от загрузочного конвейера 120 к соответствующим поддерживающим эстакадам 140. Хотя это не проиллюстрировано, должно быть понятно, что преобразователь 10 может дополнительно включать в себя запечатывающий модуль для того, чтобы запечатывать часть наполненных или укомплектованных конвертов. Более того, хотя также не проиллюстрировано, должно быть понятно, что преобразователь 10 может включать в себя блок нанесения марки (не показан) для осуществления почтовых сборов (например, марок или печатных знаков марок) по меньшей мере на часть наполненного или укомплектованного конверта. Следует понимать, что дополнительные компоненты, проиллюстрированные на Фиг.2, могут или не могут быть оперативно соединены с конвейерным узлом 90, и что в альтернативных вариантах осуществления конвейерный узел 90 оперативно соединяется с другим устройством для последующей обработки и выдачи, и что в дополнительных альтернативных вариантах осуществления конвейерный узел оперативно соединяется с корзиной для складывания наполненных и укомплектованных конвертов. Таким образом, Фиг.1 и Фиг.2 являются лишь иллюстрирующими одно устройство для обработки или выдачи наполненных или укомплектованных конвертов и не предназначены для того, чтобы быть ограничивающими.
Со ссылкой на Фиг.3, преобразователь 10 может управляться центральным контроллером 150. Центральный контроллер 150 в целях настоящего изобретения может представлять любой тип компьютера, вычислительной системы, сервера, дискового массива, программируемого устройства, например многопользовательского компьютера, однопользовательского компьютера, портативного устройства, сетевого устройства, мобильного телефона, игровой системы и т.д. Более того, центральный контроллер 150 может быть реализован, используя один или более сетевых компьютеров, например, в кластере или другой распределенной вычислительной системе. Таким образом и для краткости, центральный контроллер 150 здесь и далее будет именоваться как "вычислительная система" 150.
Вычислительная система 150 включает в себя по меньшей мере один центральный процессор (ЦП) 152, соединенный с памятью 154. Каждый ЦП 152 может быть одним или более микропроцессорами, микроконтроллерами, программируемыми вентильными матрицами, специализированными интегральными схемами (ASIC), тогда как память 154 может включать в себя оперативное запоминающее устройство (ОЗУ), динамическое оперативное запоминающее устройство (динамическое ОЗУ), статическое оперативное запоминающее устройство (статическое ОЗУ), флэш-память и/или другой цифровой запоминающий носитель. По этой причине память 154 может рассматриваться как включающая в себя запоминающее устройство, физически расположенное где-нибудь еще в вычислительной системе 150, например любую кэш-память, по меньшей мере в одном ЦП 152, а также любой объем памяти, использующийся в качестве виртуальной памяти, например хранимой на запоминающем устройстве 156, компьютере или другом контроллере, соединенном с компьютером по меньшей мере через один сетевой интерфейс 158 (проиллюстрированный и в дальнейшем упоминаемый "сетевой И-С 158") посредством сети 159. В некоторых вариантах осуществления вычислительная система 150 с возможностью поддерживать связь соединяется по меньшей мере с участком преобразователя 10 через сеть 159, которая поддерживает связь по меньшей мере с одним участком преобразователя 10 через протокол EtherCAT®, разработанный компанией Beckhoff Automation GmbH, г. Верл, Вестфалия, Германия.
Вычислительная система 150 может включать в себя запоминающее устройство 156, которое также может быть цифровым запоминающим носителем, а отдельные варианты осуществления включают в себя по меньшей мере один накопитель на жестком диске. Дополнительно запоминающее устройство 156 может быть расположено внешне по отношению к вычислительной системе 150 в качестве отдельного устройства или на одном или более сетевых компьютерах (не показаны), одном или более сетевых запоминающих устройствах (включающих в себя, например, запоминающее устройство на ленте) (не показаны) и/или одном или более других сетевых устройствах (включающих в себя, например, сервер) (не показаны). По этой причине вычислительная система 150 может быть с возможностью поддержания связи соединена с одним или более сетевыми компьютерами, одним или более сетевыми запоминающими устройствами и/или одним или более другими сетевыми устройствами через сеть 159.
Вычислительная система 150 может также включать в себя периферийные устройства, соединенные с компьютером посредством интерфейса 160 для устройства ввода/вывода (проиллюстрирован, как и в дальнейшем, "И-С 160 В/В"). В частности, вычислительная система 150 может принимать данные от пользователя по меньшей мере через один пользовательский интерфейс 162 (включающий, например, клавиатуру, мышь, микрофон и/или другие пользовательские интерфейсы) и/или выводить данные к пользователю по меньшей мере через одно устройство 164 вывода (включающее в себя, например, дисплей, динамики, принтер и/или другое устройство вывода). Более того, в некоторых вариантах осуществления И-С 160 В/В поддерживает связь с устройством, которое действует в качестве пользовательского интерфейса 162 и устройства 164 вывода в сочетании, например, устройством с сенсорным экраном.
Вычислительная система 150 может находиться под контролем операционной системы 166 и выполнять или иными словами полагаться на различные компьютерные программно-реализованные приложения, компоненты, программы, файлы, объекты, модули и т.д. в соответствии с вариантами осуществления изобретения. В частности, вычислительная система 150 может быть сконфигурирована с модулем 168 управления преобразователем для взаимодействия и управления преобразователем 10. В некоторых вариантах осуществления модуль 168 управления преобразователем выполнен с возможностью управлять скоростью и действием преобразователя 10, а также диагностировать ошибки преобразователя 10 и поддерживать связь с различными компонентами преобразователя 10 (например, компонентами 30-140, а также с его датчиками, двигателями, предохранительными устройствами). Более точно, модуль 168 управления преобразователем выполнен с возможностью обеспечивать контроль статуса в реальном масштабе времени и мониторинг данных в реальном масштабе времени, таким образом обеспечивая возможность управляющих действий на основе операционных правил или заданных алгоритмов. Управляющее действие может, в качестве примера, а не ограничения, включать в себя корректирующее действие, которое корректирует направление перемещения отдельных вкладок, необходимое из-за присущего изменения в механическом перемещении вкладок (например, по причине проскальзывания относительно компонентов тяги полотна; по причине отсутствия натяжения или смещения компонентов, например ремней). Дополнительно модуль 168 управления контроллером обеспечивает связь по открытому интерфейсу с другими протоколами, что максимизирует гибкость и улучшает диагностические способности. Например, хотя модуль 168 управления преобразователем может поддерживать связь с компонентами преобразователя через EtherCAT®, он также может быть выполнен с возможностью поддерживать связь с устройствами, связанными с преобразователем 10, которые используют альтернативные протоколы, например KBUS, PROFIBUS, RS-422 и т.д., посредством одного или более преобразователей протоколов, которые преобразуют передачи EtherCAT® в соответствующие альтернативные протоколы. Например, оборудование для обеспечения безопасности может поддерживать связь посредством протокола KBUS, а модуль 168 управления преобразователем может быть выполнен с возможностью управлять этим оборудованием для обеспечения безопасности посредством по меньшей мере одного преобразователя протокола EtherCAT®-в-KBUS, сконфигурированного в преобразователе 10. Более того, модуль 168 управления преобразователем может быть выполнен с возможностью выгружать данные на другие компьютеры, например на компьютеры, соединенные с возможностью поддерживать связь с вычислительной системой 150 посредством сети 159, включая Интернет. Более того, в некоторых вариантах осуществления модуль 168 управления преобразователем выполнен с возможностью симулировать работу преобразователя 10 в "виртуальном" преобразователе, а затем пытаться сравнивать работу преобразователя 10 с работой виртуального преобразователя.
В некоторых вариантах осуществления вычислительная система 150 включает в себя справочную таблицу 170, которая может быть использована для хранения множества операционных правил или предопределенных алгоритмов, по которым будет работать преобразователь 10. Более точно, к справочной таблице 170 может быть осуществлен доступ для определения, что нужно выполнять в ответ на конкретный сценарий, конкретное событие и/или конкретное действие. Например, когда пользователь включает преобразователь 10, к справочной таблице 170 может быть осуществлен доступ для определения, какие необходимы действия по запуску, например выполнять ли тестирование компонентов преобразователя 10, на какой скорости изначально должен быть запущен преобразователь 10. Специалисту в данной области техники должно быть понятно, что в альтернативных вариантах осуществления вычислительная система 150 может не включать в себя справочную таблицу 170, а вместо этого модуль 168 управления преобразователем может включать в себя правила или заданные алгоритмы, с помощью которых будет работать преобразователь 10.
Более того, вычислительная система 150 может включать в себя множество буферов 172 временного хранения данных, каждый из которых выполнен с возможностью хранить данные, связанные с документом, документами и/или наполненным и укомплектованным конвертом. Например, множество буферов 172 временного хранения данных может включать в себя буфер данных для каждого соответствующего режущего модуля 30, конвейерного модуля 40, модуля 50 фальцовки и буферизации, модуля 60 сбора, модуля 70 наполнения, конвейера 80 конвертов, конвейерного узла 90, блока 110 ориентации, загрузочного конвейера 120, отводящего устройства 130 и/или эстакады 140. Когда документ, документы и/или наполненный или укомплектованный конверт проходят через преобразователь 10 и, в частности, компоненты 30-140 преобразователя 10, данные могут быть переданы от соответствующего буфера к соответствующему буферу в числе буферов 172 временного хранения данных.
Со ссылкой на Фиг.4 схематично проиллюстрировано множество интерфейсов, которые могут быть включены в модуль 168 управления преобразователем для управления преобразователем 10. Более точно, модуль 168 управления преобразователем может включать в себя первичное виртуальное ведущее устройство 180, выполненное с возможностью управлять вторичным виртуальным ведущим устройством 182. Первичное виртуальное ведущее устройство 180 (в дальнейшем "ПВВУ" 180) может быть участком виртуального преобразователя (например, двигателем, цепью, роликом, осью вращения индивидуальной части виртуального преобразователя, еще одним первичным приводом преобразователя 10), использованным для управления работой виртуального преобразователя и, таким образом, работой преобразователя 10. Например, ПВВУ 180 может управляться при определенной скорости, и работа по меньшей мере участка оставшегося виртуального преобразователя может быть зависимой от работы ПВВУ 180. Более точно, вторичное виртуальное ведущее устройство 182 (в дальнейшем "ВВВУ" 182) может быть зависимым от работы ПВВУ 180. Например, ВВВУ 182 может быть участком виртуального преобразователя, который виртуально соединяется с ПВВУ 180. По этой причине модуль 168 управления преобразователем может пытаться синхронизировать работу преобразователя 10 с работой виртуального преобразователя и таким образом синхронизировать ПВВУ 180, ВВВУ 182 и/или другие части и/или компоненты виртуального преобразователя с соответствующим первичным ведущим устройством, вторичным ведущим устройством и/или другими частями и/или компонентами преобразователя 10. Таким образом, виртуальный преобразователь, а более точно, ПВВУ 180 может быть использован в качестве ориентира для управления работой преобразователя 10.
В дополнение к ПВВУ 180 и ВВВУ 182 модуль 168 управления преобразователем может включать в себя интерфейс 184 фальцовки и разрезания, транспортировки и/или полотна (например, интерфейс 184 "ввода") для управления подачей полотна 12 в режущий модуль 30, управления самим режущим модулем 30 и/или конвейерным модулем 40. Подобным образом, модуль 168 управления преобразователем может включать в себя интерфейс 186 модуля фальцовки и буферизации, интерфейс 188 модуля сбора, интерфейс 190 модуля наполнения, интерфейс 192 конвейера конвертов, интерфейс 194 блока ориентации, интерфейс 196 загрузочного конвейера и интерфейс 198 отводящего устройства для каждого из: модуля 50 фальцовки и буферизации, модуля 60 сбора, модуля 70 наполнения, конвейера 80 конвертов, блока 110 ориентации, загрузочного конвейера 120 и отводящего устройства 130. В некоторых вариантах осуществления ВВВУ 182, интерфейс 184 ввода, интерфейс 186 модуля фальцовки и буферизации, интерфейс 188 модуля сбора, интерфейс 190 модуля наполнения, интерфейс 192 конвейера конвертов являются зависимыми или "подчиненными" в отношении ПВВУ 180, тогда как интерфейс 194 блока ориентации, интерфейс 196 загрузочного конвейера и интерфейс 198 отводящего устройства не являются таковыми. По этой причине блок 110 ориентации, загрузочный конвейер 120 и отводящее устройство 130 могут управляться независимо, но принимая во внимание обстоятельство, что существует потребность в предотвращении затора в соответствующем блоке 110 ориентации, загрузочном конвейере 120 и отводящем устройстве 130. В других вариантах осуществления и, как обозначено пунктирными линиями на Фиг.4, один или более интерфейсов могут быть оперативно соединены с ПВВУ 180 через один из других интерфейсов вместо того, чтобы осуществлять это напрямую. В проиллюстрированном варианте осуществления, например, интерфейс модуля 186 фальцовки и буферизации может быть оперативно соединен с ПВВУ 180 через интерфейс 184 ввода, тогда как интерфейс 192 конвейера конвертов оперативно соединяется с ПВВУ 180 через ВВВУ 182.
Однако специалисту в данной области техники должно быть понятно, не выходя из объема изобретения, может быть использовано большее и меньшее количество интерфейсов. Например, преобразователь 10 может включать в себя большее или меньшее количество компонентов 30-140, таким образом, модуль 168 управления преобразователем может включать в себя большее или меньшее количество интерфейсов, чем количество, которое проиллюстрировано на Фиг.4. Также, например, преобразователь 10 может включать в себя большее или меньшее количество компонентов 30-140, однако модуль 168 управления преобразователем может включать в себя меньшее количество интерфейсов, чем количество компонентов у конвейера. В качестве альтернативы, модуль 168 управления преобразователем может включать в себя альтернативные интерфейсы к тем, которые проиллюстрированы. Например, модуль 168 управления преобразователем может включать в себя интерфейсы для ПВВУ 180 и ВВВУ 182, а также интерфейсы для первичных приводов, например двигателей, конвейеров, зубчатых колес, роликов или вращающихся элементов (например, направляющих роликов, выводящих роликов, роликов в форме полумесяца и т.д.) и т.д., а также для других компонентов, например вакуумных систем, вентиляторных систем, щеток, датчиков и т.д., которые могут зависеть или могут не зависеть от ПВВУ 180 и/или ВВВУ 182. Дополнительно или в качестве альтернативы, в пределы интерфейсов 184-198, проиллюстрированных на Фиг.4, могут быть включены один или более из этих дополнительных интерфейсов. По этой причине специалист в данной области техники должен понимать, что варианты осуществления изобретения не должны ограничиваться проиллюстрированными и/или дополнительными интерфейсами, которые обсуждаются в материалах настоящей заявки. По этой причине специалист в данной области техники должен понимать, что, не выходя из объема изобретения, может быть использован модуль 168 управления преобразователем с альтернативными интерфейсами.
В некоторых вариантах осуществления преобразователь 10 сконфигурирован с множеством устройств, поддерживающих EtherCAT®, выполненных с возможностью принимать и/или отвечать на передачи EtherCAT® от вычислительной системы 150. Более точно, устройства могут быть связаны с частями, первичными приводами и/или компонентами преобразователя 10 и дополнительно могут быть управляемыми и/или быть подконтрольными вычислительной системе 150 для приведения в действие преобразователя 10. Протокол EtherCAT® является системой промышленной сети Ethernet реального масштаба времени, в которой передача EtherCAT® (например, "кадр") отправляется от контроллера по меньшей мере к одному устройству, поддерживающему EtherCAT®. Каждое устройство считывает данные в кадре, адресованные этому устройству, записывает данные в кадр, если существуют данные, которые необходимо записать, а затем передает кадр к следующему устройству, назад к предыдущему устройству (например, когда кадр возвращается от оконечного блока) или к вычислительной системе 150. Таким образом, вычислительная система 150 может управлять работой множества устройств преобразователя 10 и/или принимать информацию от множества устройств преобразователя 10 посредством одной передачи EtherCAT®. В некоторых вариантах осуществления это обеспечивает вычислительную систему 150 управлением преобразователя 10 в реальном масштабе времени (или почти в реальном масштабе времени). Например, в отдельных вариантах осуществления вычислительная система 150 выполнена с возможностью обрабатывать около 218 кадров за один цикл документа, группы документов и/или наполненных или укомплектованных конвертов (например, цикл является временем между событиями, когда запрашиваются первый и второй документ и/или группа документов, и/или временем между событиями, когда первый и второй документ, и/или группа документов, и/или наполненный или укомплектованный конверт выходят из преобразователя 10, и/или движением от первого компонента ко второму компоненту преобразователя 10).
С учетом упомянутого, устройства, поддерживающие EtherCAT®, которые могут быть расположены и/или сконфигурированы в преобразователе 10, могут включать в себя по меньшей мере одно или более из следующего: главные устройства передачи (например, для поддержания связи между вычислительной системой 150 и/или другими устройствами, поддерживающими EtherCAT®), цифровые и/или аналоговые устройства ввода/вывода (например, отправляющие и/или принимающие цифровые и/или аналоговые сигналы), преобразователи протоколов (например, для преобразования передач одного протокола в другой), разветвитель (например, для разветвления передачи к одной или более веткам) и электродвигатели. Каждое устройство может индивидуально адресоваться вычислительной системой 150 в одной передаче EtherCAT® таким образом, что модуль 168 управления преобразователем может в соответствии с изобретением выборочно управлять каждым устройством и/или устройствами, соединенными с ним.
Со ссылкой на Фиг.5 графически проиллюстрировано одно соединение множества устройств, поддерживающих EtherCAT® (например, устройств, выполненных с возможностью поддерживать связь через по меньшей мере протокол EtherCAT®), в преобразователе 10 с вычислительной системой 150, а также с другими устройствами, поддерживающими EtherCAT®. Преобразователь 10 включает в себя по меньшей мере одно главное устройство 200 передачи, выполненное с возможностью принимать передачи EtherCAT®, и передавать передачи EtherCAT® по меньшей мере к участку преобразователя 10. По этой причине каждое главное устройство 200 передачи может быть соединено с другим устройством, поддерживающим EtherCAT®, например устройством 202 ввода цифрового сигнала (например, для приема цифрового сигнала от датчика или другого устройства), устройством 204 вывода сигнала (например, для отправки аналогового/или цифрового сигнала), преобразователем 206 KBUS (например, для преобразования по меньшей мере части передач, принятых в главном устройстве 200 передачи из протокола EtherCAT® в протокол KBUS, или для преобразования по меньшей мере части передач, принятых в преобразователе 206 KBUS из протокола KBUS в протокол EtherCAT®), разветвителем 208 (например, для предоставления передач EtherCAT® по меньшей мере к одной дополнительной ветке компонентов, поддерживающих EtherCAT®), преобразователем 212 RS-422 (например, для преобразования по меньшей мере части передач, принятых в главном устройстве 200 передачи, из протокола EtherCAT® в протокол RS-422, или для преобразования по меньшей мере части передач, принятых в преобразователе 212 RS-422 из протокола RS-422 в протокол EtherCAT®), устройством 214 ввода аналогового сигнала (например, для приема аналогового сигнала от датчика или другого устройства) и/или преобразователем 216 PROFIBUS (например, для преобразования по меньшей мере части передач, принятых в главном устройстве 200 передач, из протокола EtherCAT® в протокол PROFIBUS, или для преобразования по меньшей мере части передач, принятых в преобразователе 212 RS-422 из протокола PROFIBUS в протокол EtherCAT®).
Более того, главное устройство 200 передач может быть выполнено для пересылки передач EtherCAT® к другому главному устройству 200 передач, поддерживающему EtherCAT®, электродвигателю 210 и/или обратно к вычислительной системе 150. Например, как проиллюстрировано на Фиг.5 различные компоненты 200-216 находятся в древовидной топологии. Следует понимать, что каждая ветка древовидной топологии может включать в себя по меньшей мере один конечный блок (не показан), который выполнен с возможностью возвращать передачу EtherCAT® назад, наверх этой ветки (например, либо по тем же самым портовым линиям, либо по портовым линиям, отличным от тех, по которым передача EtherCAT® двигалась по ветке). Таким образом, передача EtherCAT® может двигаться от вычислительной системы через все компоненты к последнему компоненту (например, к электродвигателю 210 на нижней ветке Фиг.5), и затем двигаться назад к вычислительной системе 150. Специалисту в данной области техники должно быть понятно, что компоненты преобразователя 10 могут быть соединены способом, отличным от проиллюстрированного. Например, вместо древовидной топологии компоненты преобразователя 10 могут быть соединены линейной топологией, кольцевой топологией, топологией звезды и/или другой топологией, а также их сочетаниями, как это общеизвестно в данной области техники. Более того, специалисту в данной области техники должно быть понятно, что преобразователь 10 может включать в себя дополнительное или меньшее количество компонентов, чем проиллюстрировано, а также отличные компоненты от тех, которые проиллюстрированы. Например, следует понимать, что каждая иллюстрация этапа, представляющего электродвигатель 210, может быть связана с одним или более электродвигателями и что Фиг.5 упрощена для простоты понимания. Подобным образом, следует понимать, что каждая иллюстрация этапа, представляющего главное устройство 200 передач, устройство ввода 202 цифрового сигнала, устройство 204 вывода сигнала, контроллер 206 KBUS, разветвитель 208, преобразователь 212 RS-422, устройство 214 ввода аналогового сигнала и/или преобразователь 216 PROFIBUS может быть связана с одним или более соответствующими устройствами, и что Фиг.5 является упрощенной для простоты понимания.
Хотя это не проиллюстрировано на Фиг.1-5, преобразователь 10 может включать в себя множество цифровых и/или аналоговых датчиков. Один или более датчиков могут быть соединены с соответствующими устройствами 202 ввода цифрового сигнала и/или устройствами 214 ввода аналогового сигнала, которые в свою очередь предоставляют сигнал вычислительной системе 150 для управления преобразователем 10. Датчики могут включать в себя датчики для детектирования присутствия, отсутствия, ширины, длины, толщины, веса, ориентации, цвета, цветовых компонентов и/или других характеристик документа, группы документов и/или наполненного или укомплектованного конверта в различных местоположениях преобразователя 10 в соответствии с вариантами осуществления изобретения. Более того, датчики могут включать в себя датчики для детектирования характеристик вращения первичных приводов преобразователя 10 (например, электродвигателей, роликов, вращающихся элементов, конвейеров, зубчатых колес и т.д.), а также рабочих характеристик участков преобразователя 10 (например, температуры, скорости, скорости обработки и т.д.). Таким образом, датчики могут обеспечивать обратную связь с вычислительной системой 150 для управления преобразователем 10 и, в частности, могут обеспечивать обратную связь с вычислительной системой 150 для того, чтобы позволить ей отслеживать передвижение и/или месторасположение документа, группы документов и/или наполненного или укомплектованного конверта, когда он перемещается по преобразователю 10. Более того, датчики могут обеспечить обратную связь с вычислительной системой 150 для того, чтобы позволить ей отслеживать рабочие характеристики преобразователя 10. Например, если преобразователь 10 стартует следом за виртуальным преобразователем, скорость по меньшей мере участка преобразователя 10 может быть увеличена для некоторого периода времени для синхронизации работы преобразователя 10 с виртуальным преобразователем в соответствии с вариантами осуществления изобретения. В качестве альтернативы, если преобразователь 10 запускается перед виртуальным преобразователем, скорость по меньшей мере участка преобразователя 10 может быть уменьшена на некоторый период времени для синхронизации работы виртуального преобразователя с преобразователем 10 в соответствии с вариантами осуществления изобретения.
Со ссылкой на Фиг.6 проиллюстрировано отображение экрана 220 дисплея, которое может быть сгенерировано и отображено на устройстве с сенсорным экраном (например, устройстве, сконфигурированном в качестве пользовательского интерфейса 162 и устройства 164 вывода) и/или устройстве 164 вывода, соединенном с вычислительной системой 150. В некоторых вариантах осуществления экран дисплея иллюстрирует дисплейное отображение преобразователя 222, интерактивную информационную секцию 224 и интерактивную секцию 226 управления. Дисплейное отображение преобразователя 222 в некоторых вариантах осуществления предусмотрено для иллюстрирования преобразователя 10 и может быть дополнительно предусмотрено для указания неисправностей преобразователя 10. Более точно, по меньшей мере участок дисплейного отображения преобразователя 222 может быть подсвечен в ответ на ошибку связанного соответствующего участка преобразователя 10. В качестве альтернативы, при выборе участка дисплейного отображения преобразователя 222 ассоциированная информация может быть отображена на интерактивной информационной секции 224 и связанные элементы управления могут быть отображены на интерактивной секции 226 управления.
Интерактивная информационная секция 224 может отображать информацию о преобразователе 10 или участке преобразователя 10. Например, и как проиллюстрировано на Фиг.6, интерактивная информационная секция 224 отображает различную информацию о задании, включающую в себя количество обработанных конвертов, обработанных штук, количество обработанных вкладок, скорость обработки, время запуска/остановки/выполнения и т.д. Интерактивная информационная панель 224 может подвергаться воздействию пользователя для отображения большей информации, например журнала событий или информации о пневматике. Более того, интерактивная информационная секция 224 может подвергаться воздействию пользователя для отключения управления пользователем, входа в пошаговый режим или просмотра дополнительных параметров.
С другой стороны, интерактивная секция 226 управления может отображать информацию о скорости преобразователя 10, а также обеспечивать возможность запуска и остановки преобразователя 10, окончания задачи или сброса информации о преобразователе. Более того, интерактивная секция 226 управления обеспечивает возможность увеличить или уменьшить скорость преобразователя 10 через соответствующие представления на дисплее кнопок "+" и "-". Дополнительно интерактивная секция 226 управления обеспечивает пользователя беглым обзором скорости преобразователя через дисплейное отображение аналогового индикатора, показывающего количество штук, обрабатываемых каждый час. Цифровой дисплей может показывать точное количество штук, обрабатываемых в час. Хотя на интерактивной секции 226 управления проиллюстрирован индикатор с предельной скоростью 40000 штук в час, специалисту в данной области техники должно быть понятно, что индикатор может иллюстрировать более высокую или более низкую предельную скорость.
Со ссылкой на Фиг.7 и в качестве примера схематично проиллюстрированы вид в перспективе участка модуля 50 фальцовки и буферизации, а также участок модуля 60 сбора. Более того, на Фиг.7 проиллюстрировано, что модуль 50 фальцовки и буферизации может включать в себя по меньшей мере один накопитель 240, выполненный с возможностью накапливать по меньшей мере один сфальцованный или развернутый документ в стопе или группе (не показана), множество буферов 242a-n, выполненных с возможностью буферизировать группу (например, для увеличения или уменьшения скорости перемещения группы, а также блокировки группы в случае ошибки), и множество датчиков 244а-n буфера, выполненных с возможностью детектировать присутствие группы, когда она вводится в соответствующий буфер 242a-n. Хотя это не проиллюстрировано, следует понимать, что модуль 50 фальцовки и буферизации может включать в себя блок фальцовки, сконфигурированный перед или после накопителя 240.
Более того, на Фиг.7 проиллюстрировано, что модуль 60 сбора может включать в себя по меньшей мере один элемент 246 сбора, выполненный по меньшей мере с одним карманом (не показан) для приема документа и/или группы документов от модуля 50 фальцовки и буферизации. Документ или группа документов могут затем передаваться на элементе 246 сбора через модуль 60 сбора к модулю 70 наполнения. В некоторых вариантах осуществления модуль 60 сбора выполнен с возможностью обеспечения карманов элемента 246 сбора одной или более вкладками от соответствующих элементов 248a-m вкладывания. Более точно, карманы элемента 246 сбора могут быть выполнены не только с возможностью принимать документ и/или группу документов от модуля 50 фальцовки и буферизации, но также могут быть выполнены с возможностью принимать по меньшей мере одну вкладку от одного или более соответствующих элементов 248a-m вкладывания. Модуль 60 сбора может быть дополнительно выполнен по меньшей мере с датчиком 250 модуля наполнения для детектирования присутствия документа и/или группы документов от модуля 50 фальцовки и буферизации. В некоторых вариантах осуществления элемент 246 сбора может включать в себя цепь и/или конвейер (не показаны), выполненные с возможностью поддерживать по меньшей мере один карман, а следовательно, документ, группу документов и/или вкладку(и), когда этот карман следует через модуль 60 сбора. В этих вариантах осуществления элемент 246 сбора может управляться одним или двумя электродвигателями (не показаны).
Со ссылкой на Фиг.8, а также в качестве примера схематично проиллюстрирован участок блока 110 ориентации для приема по меньшей мере одного наполненного или укомплектованного конверта 260 от конвейерного узла 90 и переориентирования направления этих конвертов по отношению к загрузочному конвейеру 120. Более точно, проиллюстрированный участок блока 110 ориентации может включать в себя по меньшей мере один направляющий ролик 262, по меньшей мере один выводящий ролик 264 и множество датчиков 266-272. Более точно, блок 110 ориентации может включать в себя датчик 266 (в дальнейшем называемый датчиком "А") для детектирования конверта от конвейерного узла 90, датчики 268 и 270 (в дальнейшем называемые соответственно датчиками "В" и "С") для детектирования наклона, отскока или задержки соответствующих участков конверта 260 и/или датчик 272 (в дальнейшем датчик "D") для детектирования вывода конверта 260 к загрузочному конвейеру 120. В отдельных вариантах осуществления датчики A-D являются фотоэлементами, которые детектируют присутствие конверта 260 и отслеживаются при приблизительно 10 кГц.
Как проиллюстрировано на Фиг.8, конвейерный узел 90 перемещает конверт 260 в направлении 274 обработки в блоке 110 ориентации. Конверт 260 затем контактирует с поверхностью 276 блока 110 ориентации и перемещается направляющим роликом 262 в направлении 278 обработки к выводящему ролику 264, который в свою очередь перемещает конверт 260 по направлению к загрузочному конвейеру 120. По этой причине блок ориентации может быть блоком "перенаправления на девяносто градусов". При типичной операции конверт 260 будет контактировать с поверхностью 276 приблизительно в то же время, когда направляющий ролик 262 будет приводиться для перемещения конверта 260 вдоль направления 278 обработки, а после этого будет ненадолго приведен в действие выводящий ролик 264. Таким образом, датчик А будет обнаруживать приближение конверта 260, датчики B и С также будут обнаруживать конверт, а датчик D будет обнаруживать конверт у выводящего ролика 264. В целом на Фиг.8 проиллюстрирована типичная работа по переориентации направления обработки конверта 260 из направления 274 обработки в направление 278 обработки.
Со ссылкой на Фиг.9А, а также в качестве примера схематично иллюстрируется участок блока 110 ориентации, на котором конверт 260 подвергается наклону вправо (например, относительно проиллюстрированной ориентации конверта 260). Более точно, по меньшей мере участок конверта 260 может быть либо не обнаружен датчиком С, либо может отскочить перед датчиком С одновременно с тем, что перед приведением в действие направляющего ролика 262 будет обнаруживаться в течение допустимого периода времени датчиком B. Например, и со ссылкой на Фиг.9В схематично проиллюстрированы две проекции сигналов 280, 282 от датчиков B и C, которые могут быть опознаны, когда конверт 260 подвергается наклону вправо. Со ссылкой к проекциям 280, когда происходит отскок участка конверта 260 датчик B может обнаруживать присутствие участка конверта 260 приемлемый период времени, в то время как, перед тем как приводится в действие направляющий ролик 262, датчик C обнаруживает участок конверта 260 лишь в коротком периоде времени. Со ссылкой к проекциям 282, перед приведением в действие направляющего ролика 262, датчик С может вообще не обнаруживать участок конверта 260, тогда как датчик В может обнаруживать участок конверта 260 в течение приемлемого периода времени.
Со ссылкой на Фиг.10А, а также в качестве примера схематично проиллюстрирован участок блока ориентации 110, в котором конверт 260 подвергается наклону влево (например, относительно ориентации конверта 260, как проиллюстрировано). Более точно, по меньшей мере перед тем, как будет приведен в действие направляющий ролик 262, участок конверта 260 может либо вообще не обнаруживаться датчиком В, либо может отскочить перед датчиком В, причем будет обнаруживаться в приемлемом периоде времени датчиком C. Например, и со ссылкой на Фиг.10В схематично проиллюстрированы две проекции сигналов 286, 288 от датчиков B и C, которые могут быть обнаружены, когда конверт 260 подвергается наклону влево. Со ссылкой к проекциям 286, когда существует отскок участка конверта 260, перед тем как приводится в действие направляющий ролик 262, датчик С может обнаруживать участок конверта 260 в течение приемлемого периода времени, тогда как датчик B обнаруживает участок конверта 260 лишь в течение очень короткого периода времени. Со ссылкой к проекциям 288, перед тем как будет приведен действие направляющий ролик 262, датчик B может вообще не обнаружить участок конверта 260, тогда как датчик С может обнаруживать участок конверта 260 в течение приемлемого периода времени.
Со ссылкой на Фиг.11А, а также в качестве примера схематично проиллюстрирован участок блока 110 ориентации, в котором конверт 260 подвергается задержке по отношению к контакту с поверхностью 276 блока 110 ориентации или отскоку конверта 260 относительно поверхности 276 блока 110 ориентации. Более точно, перед приведением в действие направляющего ролика 262 конверт 206 может быть либо никогда не обнаружен датчиками B и C в случае "явной" задержки, либо может быть ненадолго обнаружен обоими датчиками B и C в случае "полного" отскока. Например, и со ссылкой на Фиг.11B проиллюстрированы две проекции сигналов 290, 292 от датчиков B и C, которые могут быть отслежены, когда конверт 260 подвергается либо полному отскоку в случае проекций 290, либо явной задержке в случае проекций 292. Со ссылкой к проекциям 290, перед тем как будет приведен в действие направляющий ролик 262, когда происходит полный отскок конверта 260, датчики B и C могут обнаруживать участок конверта в течение короткого периода времени, но не в течение приемлемого периода времени. Со ссылкой к проекциям 292, перед тем, как направляющий ролик 262 приводится в действие, в случае явной задержки конверта 260, датчики B и C могут вообще не обнаруживать конверта. При сценарии, проиллюстрированном на Фиг.11А, датчик А мог бы обнаруживать участок конверта, перед тем как направляющий ролик 262 был приведен в действие, и датчик D мог обнаруживать участок конверта 260 в пределах приемлемого периода времени. При таком сценарии может быть определено, что застревания в преобразователе 10 не существует.
Со ссылкой на Фиг.12, а также в качестве примера схематично проиллюстрирован участок блока 110 ориентации, причем по меньшей мере участок конверта 260 подвергается наклону, отскоку и/или задержке и поэтому не обнаруживается датчиком А. Более точно, этот сценарий иллюстрирует, что может быть объявлена ошибка, поскольку конверт 260 не был обнаружен датчиком А.
Специалисту в данной области техники должно быть понятно, что конфигурации, которые были проиллюстрированы на Фиг.1-12, не подразумеваются в качестве ограничивающих варианты осуществления изобретения. В частности, хотя преобразователь 10 проиллюстрирован в различных вариантах осуществления, включая режущий модуль 30, конвейерный модуль 40, модуль 50 фальцовки и буферизации, модуль 60 сбора, модуль 70 наполнения, конвейер 80 конвертов, конвейерный узел 90, блок 110 ориентации, загрузочный конвейер 120, по меньшей мере одно отводящее устройство 130 и/или эстакаду 140, в альтернативных вариантах осуществления преобразователь 10 может включать в себя меньшее количество или дополнительные компоненты и модули, в отличие от проиллюстрированных. Специалистам в данной области техники должно быть понятно, что могут быть использованы другие альтернативные преобразователи 10, не выходя из объема изобретения.
Дополнительно, специалистам в данной области техники должно быть ясно, что дисплейный экран 220, проиллюстрированный на Фиг.6, также не подразумевается в качестве ограничивающего варианты осуществления изобретения. Например, дисплейный экран 220 может включать в себя большее или меньшее количество секций 222-226 для дисплейного отображения кнопок и/или информации, в отличие от проиллюстрированного. Более того, и как обсуждено, пользователь может взаимодействовать с дисплейным экраном 220 или его участком для просмотра информации, относящейся к пользовательскому взаимодействию. Например, если пользователь выбирает на дисплейном отображении преобразователя 222 конкретный компонент, будет понятно, что информация, ассоциированная с этим конкретным компонентом, может быть отображена в интерактивном информационном сегменте 224 и/или интерактивном сегменте 226 управления. Также, в качестве примера, пользователь может взаимодействовать с дополнительными дисплейными отображениями кнопок управления (например, "Управление", "Пошаговый режим", "Далее" и т.д.) для получения доступа к дополнительным параметрам управления для управления преобразователем (например, соответственным осуществлением индивидуального управления модулями, осуществлением пошагового управления, просмотром большего количества настроек управления и т.д.), а также может взаимодействовать с дополнительными дисплейными отображениями кнопок (например, с дисплейными отображениями кнопок "Информация", "Журнал событий", "Пневматика" и т.д.) для получения доступа к дополнительной информации, соответствующей этим кнопкам (например, соответствующей дополнительной информации о текущем преобразователе и задачах, журнале событий преобразователя 10, информации о пневматике преобразователя 10 и т.д.).
Более того, тогда как вычислительная система 150 включает в себя некоторое количество компонентов, а модуль 168 управления преобразователем включает в себя некоторое количество интерфейсов, специалисту в данной области техники должно быть понятно, что могут быть использованы альтернативные аппаратные средства и/или программные средства, не выходя из объема изобретения. Например, интерфейс виртуального преобразователя, интерфейс передач EtherCAT® и т.д. могут быть включены в пределы или выделены из модуля 168 управления преобразователем, не выходя из объема изобретения. По этой причине могут быть использованы иные альтернативные аппаратные средства/или программные средства, не выходя из объема изобретения.
Например, специалисту в данной области техники должно быть понятно, что на Фиг.7 проиллюстрирован лишь участок модуля 50 фальцовки и буферизации, а также участок модуля 60 сбора преобразователя 10. По этой причине модуль 50 фальцовки и буферизации и/или модуль 60 сбора может включать в себя большее или меньшее количество компонентов, чем то, которое проиллюстрировано, а в некоторых вариантах осуществления может включать в себя дополнительные компоненты к тем, которые проиллюстрированы. Более того, а также в качестве примера специалисту в данной области техники должно быть понятно, что Фиг.8, 9A, 10A, 11A и 12 являются лишь иллюстрирующими участок преобразователя 10 и используются для предоставления различных сценариев в блоке 110 ориентации. Конкретная ориентация и количество датчиков 266-272, конкретные направления 274, 278 обработки и конкретные ориентация, направление и количество роликов 262-264 не предполагаются ограничивающими. Более того, специалисту в данной области техники должно быть понятно, что на Фиг.9B, 10B и 11B показаны лишь примерные сигналы, которые могут быть предоставлены вычислительной системе 150 от датчиков B и C, при этом они не предполагаются ограничивающими.
Подпрограммы, выполняемые для реализации вариантов осуществления изобретения, выполняемые либо как часть операционной системы, либо как отдельно взятое приложение, компонент, программа, объект, модуль либо последовательность операций, выполняемая устройством(и) обработки данных или ЦП(и), будут называться в материалах настоящей заявки как "компьютерный программный код" или просто "программный код". Программный код типично содержит одну или более инструкций, которые являются резидентными в различное время в различной памяти и запоминающих устройствах в преобразователе 10 и/или вычислительной системе 150 и которые, когда считываются и выполняются одним или более устройствами обработки данных или ЦП преобразователя 10 и/или вычислительной системой 150, побуждают преобразователь 10 и/или вычислительную систему 150 выполнять шаги, необходимые для выполнения шагов, элементов и/или этапов, осуществляющих различные аспекты изобретения.
Тогда как изобретение описывалось и будет описываться в контексте полностью функциональной документации, а также систем связи и вычислительных систем, специалистам в данной области техники должно быть понятно, что различные варианты осуществления изобретения допускают их распространение в качестве программного продукта во множестве форм и что изобретение применяет машиночитаемые несущие сигналы среды любого типа, фактически используемые для осуществления распространения. Примеры машиночитаемых несущих сигналы сред включают в себя, но не в качестве ограничения, среды записываемого типа, например в числе прочих энергозависимые и энергонезависимые запоминающие устройства, гибкие и другие съемные диски, накопители на жестком диске, оптические диски (например, CD-ROM, DVD и т.д.), и среды передающего типа, например цифровые и аналоговые линии связи.
В дополнение, различные типы программного кода, описанные в материалах настоящей заявки, могут быть идентифицированы на основе приложения или программного компонента, в пределах которого они реализованы в отдельном варианте осуществления изобретения. Однако должно быть принято во внимание, что любая конкретная последующая программная терминология используется лишь для удобства, и, следовательно, изобретение не должно быть ограничено использованием лишь любого конкретного применения, идентифицированного и/или выраженного такой терминологией. Более того, несмотря на изложенное большое количество способов, с помощью которых могут быть организованы компьютерные программы посредством последовательности операций, подпрограмм, процедур, методов, модулей, объектов и подобного, а также различных способов, с помощью которых программная функциональность может быть распределена среди различных уровней программного обеспечения, которые являются резидентными в типичном компьютере (например, операционных систем, библиотек, API, приложений, апплетов и т.д.), должно быть понятно, что данное изобретение не ограничено такой конкретной организацией и распределением программной функциональности, описанной в материалах настоящей заявки.
На Фиг.13 проиллюстрирована последовательность 300 операций способа, которая может быть выполнена вычислительной системой для инициализации работы виртуального преобразователя в соответствии с вариантами осуществления изобретения. Более точно, последовательность 300 операций может быть выполнена модулем управления преобразователем вычислительной системы. По этой причине установочная скорость виртуального преобразователя и преобразователя может быть определена (этап 302) и предоставлена первичному виртуальному ведущему устройству (проиллюстрированному как "ПВВУ") виртуального преобразователя (этап 304). В некоторых вариантах осуществления установочная скорость определяется посредством ввода пользователя, включая ввод пользователя через пользовательский интерфейс вычислительной системы и/или взаимодействие пользователя с отображением на дисплейном экране, обеспеченным модулем управления преобразователем. В ответ на предоставление установочной скорости к первичному виртуальному ведущему устройству первичное виртуальное ведущее устройство может быть соединено с вторичным виртуальным ведущим устройством (проиллюстрированным как "ВВВУ") виртуального преобразователя и/или с другими интерфейсами виртуального преобразователя, которые являются зависимыми от этого первичного виртуального ведущего устройства (этап 306). Интерфейсы виртуального преобразователя и/или другие части виртуального преобразователя, которые не зависят от первичного виртуального ведущего устройства, могут приводиться в действие для поддержания виртуального преобразователя при установочной скорости (этап 308). По этой причине виртуальный преобразователь может приводиться в действие с установочной скоростью.
Фиг.14А и 14В являются блок-схемами, иллюстрирующими последовательность операций 310, которые могут выполняться вычислительной системой для приведения в действие по меньшей мере участка преобразователя в соответствии с вариантами осуществления изобретения. Последовательность операций может начинаться при соединении первичного виртуального ведущего устройства виртуального преобразователя с его соответствующим компонентом и/или частью преобразователя (например, "первичным ведущим устройством" преобразователя, проиллюстрированным как "ПВУ"), при соединении вторичного виртуального ведущего устройства виртуального преобразователя с его соответствующим компонентом и/или частью преобразователя (например, "вторичным ведущим устройством" преобразователя, проиллюстрированным как "ВВУ"), а также при соединении других виртуальных компонентов и/или виртуальных частей виртуального преобразователя с их соответствующими компонентами и/или частями преобразователя (этап 312). Установочная скорость тогда может быть передана к виртуальному преобразователю и преобразователю (этап 314) подобным образом, как это проиллюстрировано на Фиг.13.
Со ссылкой на Фиг.14А и Фиг.14В, когда первичное ведущее устройство, вторичное ведущее устройство и/или компоненты или части конвейера соединяются с соответствующими первичным виртуальным ведущим устройством, вторичным виртуальным ведущим устройством и/или виртуальными компонентами или частями виртуального преобразователя, преобразователь может начать работу и предпринимать попытку достичь установочной скорости. После того как установочная скорость была передана к виртуальному преобразователю и преобразователю, может быть определено, достигнута ли установочная скорость для первичного ведущего устройства (этап 316). Если установочная скорость не достигнута для первичного ведущего устройства (ветка "Нет" этапа 316 принятия решения), можно снова начать определение того, была ли достигнута установочная скорость (этап 316). Когда первичное ведущее устройство достигает установочной скорости (ветка "Да" этапа 316 принятия решения), определяется, имеет ли первичное ведущее устройство постоянную установочную скорость (этап 318). В отдельных вариантах осуществления может быть определено, что первичное ведущее устройство достигло постоянной установочной скорости, когда первичное ведущее устройство поддерживает установочную скорость некоторый период времени, например около двух секунд. Если первичное ведущее устройство не достигло постоянной установочной скорости (ветка "Нет" этапа 318 принятия решения), то может снова определяться, достигнута ли постоянная установочная скорость (этап 318). Если первичное ведущее устройство достигло постоянной установочной скорости (ветка "Да" этапа 318 принятия решения), то последовательность операций может отсоединить по меньшей мере один буфер от первичного ведущего устройства (этап 320).
При отсоединении по меньшей мере одного буфера от первичного ведущего устройства, а более точно, буфера, по существу примыкающего по меньшей мере к одному накопителю (например, как проиллюстрировано на Фиг.7, "Буфера 1"), последовательность операций может подготовить этот буфер для приема по меньшей мере одного документа или группы документов из этого накопителя. Является преимущественным отцепить буфер от первичного ведущего устройства в соответствии со скоростью документа или группы документов, предоставляемых буферу, которая может быть ограничена скоростью переднего по ходу компонента, например накопителя и/или другой части или компонента преобразователя. Таким образом, может быть запрошен документ или документы (этап 322).
В ответ на запрос документа может быть определено, укомплектована ли группа, связанная с этим документом (этап 324). Если группа не укомплектована (ветка "Нет" этапа 324 принятия решения), для этой группы могут быть запрошены дополнительные документы (этап 322). Когда группа укомплектована (ветка "Да" этапа 324 принятия решения), группа может быть направлена к буферу, по существу примыкающему по меньшей мере к одному накопителю, и может быть определено, детектирован ли передний край этой группы (этап 326). Если у буфера, по существу примыкающего по меньшей мере к одному накопителю, передний край группы не детектирован (ветка "Нет" этапа 326 принятия решения), может снова определяться, детектирован ли передний край у этого буфера (этап 326). Когда передний край группы детектируется у буфера, по существу примыкающего по меньшей мере к одному накопителю (ветка "Да" этапа 326 принятия решения), определяется местоположение, в котором группа будет передана элементу сбора модуля сбора преобразователя при текущей скорости (например, "точка попадания" является местоположением элемента сбора, в которое "попадает" группа) (этап 328). Более точно, может быть определено, попадет ли группа в карман элемента сбора.
В ответ на определение для элемента сбора точки попадания может быть определено, находится ли местоположение, в котором группа будет передана элементу сбора, в пределах целевого диапазона, для того, чтобы передать группу к элементу сбора (например, является ли точка попадания карманом или другим подходящим участком элемента сбора таким образом, что группа будет направлена к этому карману, либо точка попадания не совпадет с карманом элемента сбора) (этап 330). Когда точка попадания находится вне пределов целевого диапазона (ветка "Нет" на этапе 330 принятия решения), может быть определена разница между вычисленным местоположением элемента сбора, в которое группа была бы перемещена, и следующим желаемым местоположением элемента сбора, в которое группа могла быть перемещена (например, разница между текущей точкой попадания и целевой точкой попадания следующего кармана элемента сбора), и это значение может быть использовано для определения того, когда делать следующий запрос (этап 332). В отдельных вариантах осуществления разница может включать в себя определение поворотного положения элемента сбора и/или его двигателя.
Когда точка попадания находится в пределах целевого диапазона (ветка "Да" этапа 33 принятия решения) или после коррекции местоположения, в котором необходимо выполнить следующую коррекцию (этап 332), может быть определено, детектирован ли передний край группы у буфера, по существу примыкающего к элементу сбора (этап 334), который может быть тем же самым буфером, как буфер, по существу примыкающий по меньшей мере к одному накопителю. Когда передний конец группы не детектирован у буфера, по существу примыкающего к элементу сбора (ветка "Нет" этапа 334 принятия решения), может снова определяться, детектирован ли передний конец группы у этого буфера (этап 334). Когда передний конец группы детектируется у буфера, по существу примыкающего к элементу сбора (ветка "Да" этапа 334 принятия решения), снова определяется местоположение, в котором эта группа будет передана элементу сбора преобразователя при текущей скорости (например, "точка попадания" является местоположением, в котором группа "попадет" в элемент сбора) (этап 336). В ответ на повторное определение точки попадания снова может быть определено, находится ли месторасположение, в котором группа будет передана элементу сбора, в пределах целевого диапазона для передачи группы элементу сбора (этап 338).
Когда точка попадания не находится в пределах целевого диапазона (ветка "Нет" этапа 338 принятия решения), может быть определено изменение для скорости буфера, по существу примыкающего к элементу сбора, для попадания в следующий карман (этап 340). Более точно, может быть определено, должен ли этот буфер ускориться или замедлиться для попадания в следующий карман и каково должно быть это значение увеличенной или уменьшенной скорости. В силу этого определяется, возможно ли для группы попасть в следующий карман при корректировках, осуществленных на этапе 340 (этап 342). Определение того, возможно ли для группы попасть в следующий карман, может быть выполнено с учетом дополнительных групп перед и/или после текущей группы, детектированной у буфера, по существу примыкающего к элементу сбора, максимальной скорости буфера, по существу примыкающего к элементу сбора, минимальной скорости буфера, по существу примыкающего к элементу сбора, и/или текущему местоположению по меньшей мере одного следующего кармана элемента сбора. По этой причине, когда определяется, что для этой группы не существует возможности попасть в следующий карман (ветка "Нет" этапа 342 принятия решения), счетчик пропуска увеличивается (этап 344) и определяется, больше ли значение счетчика пропуска чем 2 (этап 346). Когда значение счетчика пропуска больше чем 2 (ветка "Да" этапа 346 принятия решения), объявляется ошибка (этап 348). Когда значение счетчика пропуска не больше чем 2 (ветка "Нет" этапа 346 принятия решения), может быть определено изменение скорости для буфера, по существу примыкающего к элементу сбора, для попадания в карман, после того как сможет быть определен следующий карман (этап 348). После определения того, что для группы возможно попасть в следующий карман (ветка "Да" этапа 342 принятия решения), или после вычисления изменения в скорости для буфера, по существу примыкающего к элементу сбора для попадания в карман, идущий за следующим карманом (этап 348), скорость буфера, по существу примыкающего к элементу сбора, может быть соответственно откорректирована (этап 350). В ответ на корректирование скорости буфера, по существу примыкающего к элементу сбора, последовательность операций может вернуться к этапу 338.
Возвращаясь к этапу 338, когда точка попадания находится в пределах целевого диапазона (ветка "Да" этапа 338 принятия решения), последовательность операций может подождать группу, которая должна быть передана к элементу сбора (этап 352), когда определяется, что скорость буфера, по существу примыкающего к элементу сбора, является равной скорости первичного ведущего устройства (этап 354). Если скорость этого буфера не равна скорости первичного ведущего устройства (ветка "Нет" этапа 354 принятия решения), скорость буфера может быть откорректирована так, чтобы совпадать со скоростью первичного ведущего устройства (этап 356), и снова может определяться, равна ли скорость буфера, по существу примыкающего к элементу сбора, скорости первичного ведущего устройства. Когда скорость буфера, ближайшего к элементу сбора, равна скорости первичного ведущего устройства (ветка "Да" этапа 354 принятия решения), может быть определено, соединен ли этот буфер с первичным ведущим устройством (этап 358). Когда буфер, по существу примыкающий к элементу сбора, не соединен с первичным ведущим устройством (ветка "Нет" этапа 358 принятия решения), этот буфер может быть повторно соединен с первичным ведущим устройством (этап 360). В ответ на определение, что буфер, по существу примыкающий к элементу сбора, соединен с первичным ведущим устройством (ветка "Да" этапа 358 принятия решения), или в ответ на повторное соединение этого буфера с первичным ведущим устройством (этап 360) последовательность операций может снова запросить документ или документы (этап 322).
Со ссылкой на Фиг.14А и 14B, следует понимать, что стопа или группа может включать один или больше документов, а термин "группа" не предполагается ограничиваемым множеством документов. Более того, следует понимать, что этапы 334-338 могут быть опущены, если по меньшей мере между одним накопителем и элементом сбора существует один буфер. По этой причине и в альтернативных вариантах осуществления последовательность операций может осуществляться от этапа 332 до этапа 340, не выходя из объема изобретения. Более того, и как проиллюстрировано на Фиг.14А и Фиг.14B, запрос документа может быть зависимым не только от перемещения документа или группы документов, но также основан на поворотном положении элемента сбора и/или его электродвигателя.
Фиг.15 - блок-схема, иллюстрирующая последовательность операций 370, которая может быть выполнена вычислительной системой для определения необходимости коррекции по меньшей мере для одного направляющего ролика и/или по меньшей мере выводящего ролика участка блока ориентации преобразователя в соответствии с вариантами осуществления изобретения и в отдельных вариантах осуществления участка блока ориентации, проиллюстрированного на Фиг.8-12. Более точно, первый датчик (например, датчик А) может обнаруживать по меньшей мере участок конверта (например, датчик А "срабатывает") (этап 372). В ответ последовательность операций может выждать первый период времени (например, время "X") для привода по меньшей мере одного направляющего ролика и выждать второй период времени (например, время "Y") для привода по меньшей мере одного выводящего ролика (этап 374). Первый период времени может быть периодом времени, сконфигурированным достаточно продолжительным, чтобы позволить конверту осуществить контакт с поверхностью блока ориентации, но не являться достаточно продолжительным для отскока конверта, тогда как второй период времени может быть периодом времени, сконфигурированным для привода выводящего ролика, непосредственно перед тем, как конверт достигнет выводящего ролика.
Последовательность операций может тогда определить, детектировали ли второй и третий датчики (например, соответственно датчики B и C), которые могут быть использованы для детектирования наклона, отскока и/или задержки по меньшей мере участок конверта (например, были "покрыты") в пределах первого промежутка времени по меньшей мере на второй промежуток времени (этап 376). Более точно, первый промежуток времени может быть промежутком времени, после того, как первый датчик обнаружил по меньшей мере участок конверта, тогда как второй промежуток времени может быть периодом времени, во время которого анализируются показания второго и/или третьего датчика для определения, связан ли участок конверта, детектированный вторым и/или третьим датчиком, с наклоном или задержкой. Когда второй и/или третий датчик не детектировали соответствующие участки конверта в пределах первого и/или второго промежутков (ветка "Нет" этапа 376 принятия решения), может быть определено, был ли подвержен один участок конверта наклону, отскоку и/или задержке (этап 378). В отдельных вариантах осуществления данные, связанные с конвертом, детектированным вторым и третьим датчиками, анализируются для определения, был ли конверт подвержен наклону вправо с отскоком, наклону вправо с задержкой, наклону влево с отскоком, наклону влево с задержкой, полному отскоку или явной задержке. Если конверт подвергается наклону вправо с отскоком (например, как проиллюстрировано на Фиг.8А и проекциями 260 Фиг.8B), для следующего конверта может быть уменьшено первое время (этап 380). Уменьшение первого времени может уменьшить продолжительность времени для привода по меньшей мере одного направляющего ролика для предотвращения того, чтобы конверт подвергался наклону вправо с отскоком. Если конверт подвергается наклону вправо с задержкой (например, как проиллюстрировано на Фиг.8А и проекциями 262 Фиг.8В), для следующего конверта может быть увеличено первое время (этап 382). Увеличение первого времени может увеличить продолжительность времени для привода по меньшей мере одного направляющего ролика для предотвращения того, чтобы конверт подвергался наклону вправо с задержкой. Если конверт подвергается наклону влево с отскоком (например, как проиллюстрировано на Фиг.9А и проекциями 270 Фиг.9В), для следующего конверта может быть уменьшено первое время (этап 384). Уменьшение первого времени может уменьшить продолжительность времени для привода по меньшей мере одного направляющего ролика для предотвращения того, чтобы конверт подвергался наклону влево с отскоком. Если конверт подвергается наклону влево с задержкой (например, как проиллюстрировано на Фиг.9А и проекциями 272 Фиг.9В), для следующего конверта первое время может быть увеличено (этап 386). Увеличение первого времени может увеличить продолжительность времени для привода по меньшей мере одного направляющего ролика для предотвращения того, чтобы конверт подвергался наклону влево с задержкой.
В дополнение, к определению наклона с отскоком и/или задержкой также могут быть определены полный отскок и/или явная задержка, при которых второй и третий датчик не детектируют соответствующие участки конверта в пределах первого и/или второго промежутков времени. Когда конверт подвергается полному отскоку (например, как проиллюстрировано на Фиг.10А и проекциях 280 Фиг.10В), для следующего конверта может быть уменьшено первое время (этап 388). Уменьшение первого времени может уменьшить продолжительность времени привода по меньшей мере одного направляющего ролика, таким образом уменьшая продолжительность времени, в течение которого конверт достигает поверхности блока ориентации, и предполагается, что это преимущественно допускает лучшую передачу конверта по меньшей мере к одному выводящему ролику. Когда конверт подвергается явной задержке (например, как проиллюстрировано на Фиг.10А, а более конкретно проекциями 282 Фиг.10В), для следующего конверта может быть увеличено первое время (этап 390). Увеличение первого времени может увеличить продолжительность времени для привода по меньшей мере одного направляющего ролика, таким образом увеличивая продолжительность времени, в течение которого конверт достигает поверхности блока ориентации, и предполагается, что это преимущественно допускает лучшую передачу конверта по меньшей мере к одному выводящему ролику.
Когда второй и третий датчики детектируют соответствующие участки конверта в пределах первого и второго промежутков (ветвь "Да" этапа 376 принятия решения), коррекции первого времени для привода по меньшей мере одного направляющего ролика не происходит (этап 392). В ответ на коррекцию наклона, задержки, отскока и/или их сочетаний (этапы 380-390), а также в ответ на определение того, что никакой коррекции направляющего ролика не требуется (этап 392), последовательность операций может определять, детектирует ли четвертый датчик (например, датчик D), который может использоваться для детектирования присутствия по меньшей мере участка конверта по меньшей мере у одного выводящего ролика, действительно детектирует, что по меньшей мере участок конверта (например, датчик D "накрыт") находится в пределах третьего промежутка времени (этап 394). Более точно, третий промежуток времени может быть периодом времени, в течение которого анализируется четвертый датчик для определения, детектирован ли четвертым датчиком соответствующий участок конверта. Если четвертый датчик не детектирует по меньшей мере участок конверта в пределах третьего промежутка (ветка "Нет" этапа 394 принятия решения), последовательность операций может определять, детектировал ли вообще четвертый датчик по меньшей мере участок конверта (например, детектировал ли ранее или позднее четвертый датчик по меньшей мере участок конверта) (этап 396). Если четвертый датчик вообще не детектировал по меньшей мере участок конверта (ветка "Нет" этапа 396 принятия решения), может быть объявлено застревание и/или ошибка (этап 398). Если четвертый датчик детектировал по меньшей мере участок конверта ранее или позднее (ветка "Да" этапа 396 принятия решения), может быть откорректировано второе время. Более точно, если конверт детектирован перед третьим промежутком (например, конверт детектирован ранее), для следующего конверта может быть уменьшено второе время по меньшей мере для одного выводящего ролика, который должен приводиться (этап 400). Соответственно, если конверт детектирован после третьего промежутка времени (например, конверт детектирован позднее), для следующего конверта может быть увеличено второе время по меньшей мере для одного выводящего ролика, который должен приводиться (этап 402). Возвращаясь к этапу 394, когда четвертый датчик детектирует по меньшей мере участок конверта в пределах третьего промежутка времени (ветка "Да" этапа 394 принятия решения), не существует потребности в коррекции второго времени для привода по меньшей мере одного выводящего ролика (этап 404).
Фиг.16 является блок-схемой, иллюстрирующей последовательность операций 410 способа, которая может быть выполнена вычислительной системой для остановки преобразователя в соответствии с вариантами осуществления изобретения. В частности, может быть определено, что была объявлена ошибка или что пользователь выдал команду для остановки работы конвейера (например, команду экстренной остановки) (этап 412). По этой причине может быть запрещен любой новый запрос документа или группы документов (этап 414) и может быть проанализирован буфер, по существу примыкающий к элементу сбора (этап 416). Более точно, может быть определено, может ли принять буфер по меньшей мере одну группу документов (этап 418). Когда буфер, по существу примыкающий к элементу сбора, может принять по меньшей мере одну группу документов (ветка "Да" этапа 418 принятия решений), этот буфер принимает по меньшей мере одну группу, отсоединяется от предшествующих и/или последующих буферов, если таковые существуют, отсоединяется от первичного ведущего устройства, если соединен, и/или отсоединяется от виртуального преобразователя (этап 420). Когда буфер, по существу примыкающий к элементу сбора, не может принять по меньшей мере одну группу документов (ветка "Нет" этапа 418 принятия решения), или после этапа 420, может быть определено, существует ли по меньшей мере один дополнительный буфер (этап 422). В отдельных вариантах осуществления "следующий" буфер может быть буфером "N-1", причем N является ранее анализированным буфером. Когда существует по меньшей мере один дополнительный буфер (ветка "Да" этапа 422 принятия решения), этот буфер анализируется на этапе 424 и последовательность операций возвращается назад к этапу 418.
Когда не существует по меньшей мере одного дополнительного буфера (ветка "Нет" этапа 422 принятия решений), компоненты преобразователя отсоединяются от виртуального преобразователя (этап 426). Это может включать в себя отсоединение первичного ведущего устройства от первичного виртуального ведущего устройства, а также вторичного ведущего устройства от вторичного виртуального ведущего устройства, а также отсоединение модулей, компонентов и/или частей преобразователя от их соответствующих модулей, компонентов и/или частей виртуального преобразователя (этап 426). Впоследствии и если возможно, документ, группа документов и/или наполненный или укомплектованный конверт могут быть высвобожденными из преобразователя (например, быть обработанным преобразователем) (этап 428). Следует понимать, что в случае застревания или экстренной остановки преобразователь может быть остановлен вместо того, чтобы продолжать обработку документа, группы документов и/или наполненного или укомплектованного конверта.
Фиг.17 - блок-схема, иллюстрирующая последовательность 430 операций способа, которые могут быть выполнены вычислительной системой для определения рабочих характеристик преобразователя на основе характеристик документа или группы документов в соответствии с вариантами осуществления изобретения. Более точно, вычислительная система может определить длину, ширину, толщину, вес и/или другие характеристики документа или группы документов (например, "документа(ов)") (этап 432). В некоторых вариантах осуществления эти характеристики определяются от датчиков в преобразователе, тогда как в альтернативных вариантах осуществления эти характеристики являются входными данными от пользователя и рассчитываются вычислительной системой. На основе этих характеристик затем могут быть определены скорость контакта, скорость транспортировки и/или скорость вывода для транспортировки документа(ов), а также скорость преобразователя и его синхронизация с виртуальным преобразователем (этап 434). Дополнительно может быть определено, когда осуществлять контакт с документом(ами), когда выводить документ(ы), и когда корректировать скорости (например, замедлиться и/или ускориться по отношению к и/или от скорости контакта, скорости транспортировки и/или скорости вывода) на основе характеристик документа(ов), а также скорости преобразователя и его синхронизации с виртуальным преобразователем (этап 436). Например, скорость контакта может быть меньшей для документа(ов), имеющего больший вес для предотвращения повреждения документа(ов) при контакте, тогда как скорость вывода может быть меньшей для документа(ов), имеющего большую длину для предотвращения повреждения при выводе документа(ов). Также, в качестве примера, скорость транспортировки первого документа(ов) может быть более низкой, чем скорость транспортировки второго документа(ов), поскольку преобразователю необходимо "нагнать" в работе виртуальный преобразователь и таким образом соответственно увеличить эту скорость транспортировки. Более того, следует понимать, что "случаи" корректировки скоростей могут включать в себя моменты времени для корректировки скоростей (например, включать моменты времени по отношению к работе по меньшей мере одного ролика при каждой соответствующей скорости, а также моменты времени по отношению к синхронизации), положения документа(ов), в которых корректируется скорость, и/или осей вращения по меньшей мере одного ролика, при которых корректируются скорости в соответствии с вариантами осуществления изобретения.
В ответ на определение подходящих скоростей для транспортировки документа(ов) (этап 434), а также при корректировании этих скоростей (этап 436) скорость по меньшей мере одного ролика (например, по меньшей мере одного ролика в накопителе или буфере, который может быть по меньшей мере одним направляющим роликом и/или по меньшей мере одним роликом, сконфигурированным с захватывающим и транспортирующим устройством для документа(ов)) может быть откорректирована к скорости контакта для того, чтобы должным образом осуществить контакт с документом(ы) (этап 438). Подобным образом, скорость по меньшей мере одного ролика может быть откорректирована к скорости транспортировки для того, чтобы должным образом транспортировать документ(ы) (этап 440), а также скорость по меньшей мере одного ролика может быть откорректирована к скорости вывода для того, чтобы должным образом выводить документ(ы) (этап 442). При выводе документа(ов) (этап 444) скорость по меньшей мере одного ролика может быть откорректирована к самой высокой скорости для того, чтобы достичь положения ожидания, затем остановиться в положении ожидания для дополнительного документа(ов) (этап 446).
В дополнение, для управления работой преобразователя вычислительная система, а в частности модуль управления преобразователем, сконфигурированный в ней, может быть выполнен с возможностью отслеживать данные, ассоциированные с документом, группой документов и/или наполненным или укомплектованным конвертом. Фиг.18 - блок-схема, иллюстрирующая последовательность 450 операций способа, который может быть выполнен вычислительной системой для отслеживания данных, ассоциированных с документом, группой документов и/или наполненным или укомплектованным конвертом, когда документ, группа документов и/или наполненный или укомплектованный конверт перемещается внутри преобразователя в соответствии с вариантами осуществления изобретения. Более точно, данные, ассоциированные с документом или группой документов (например, как проиллюстрировано и указано "документом(и)" с целью краткости), могут быть сохранены в вычислительной системе и переданы посредством множества буферов, связанных с соответствующими расположениями, компонентами, модулями и/или частями преобразователя в качестве документа(ов), проходящего через эти соответствующие расположения, компоненты, модули и/или части преобразователя. Таким образом, данные, ассоциированные с документом(и), могут быть перемещены к начальному буферу временного хранения (этап 452). При детектировании перемещения документа(ов) в новое местоположение (ветка "Да" этапа 454 принятия решения) данные, ассоциированные с документом(и), могут быть перемещены в буфер временного хранения, ассоциированный с этим новым местоположением (этап 456). В качестве альтернативы, когда документ(ы) не детектируется (например, в случае застревания, отсутствующего сигнала датчика или экстренной остановки) (ветка "Нет" этапа 454 принятия решения), может быть объявлена ошибка (этап 458).
После перемещения данных, ассоциированных с документом(и), в буфер временного хранения, связанный с новым местоположением (этап 456), может быть определено, был ли добавлен по меньшей мере один дополнительный документ к документу(ам) (например, новый документ, добавленный в модуле фальцовки и буферизации или модуле сбора) (этап 460). Когда определяется, что по меньшей мере один дополнительный документ был добавлен к документу(ам) (ветка "Да" этапа 460 принятия решения), данные, ассоциированные по меньшей мере с одним дополнительным документом, добавляются к данным, ассоциированным с документом(и) (этап 462). Когда определяется, что по меньшей мере один дополнительный документ не был добавлен к документу(ам) (ветка "Нет" этапа 460 принятия решения) или в ответ на добавление данных, ассоциированных по меньшей мере с одним дополнительным документом, к данным, ассоциированным с документом(и) (этап 462), может определяться, был ли документ(ы) выведен к или помещен в конверт (этап 464). Когда документ(ы) был выведен к и помещен в конверт (ветка "Нет" этапа 464 принятия решения), снова может быть определено, транспортировался ли документ(ы) в новое месторасположение (этап 454). В качестве альтернативы, когда документ(ы) выводился к и/или помещался в конверт (ветка "Да" этапа 464 принятия решения), данные, ассоциированные с документом(и), могут быть перемещены в буфер временного хранения, связанный с выведенным документом(и) и/или наполненным или укомплектованным конвертом (этап 466). Если необходимо, данные в буфере выводящегося документа(ов) и/или наполненного или укомплектованного конверта могут быть сохранены за пределами множества буферов временного хранения данных (этап 468), например в оперативной памяти вычислительной системы.
С учетом упомянутого выше следует понимать, что преобразователь может управляться вычислительной системой на основе местоположения документа, группы документов и наполненного или укомплектованного конверта в пределах преобразователя. Более того, преобразователь может управляться вычислительной системой на основе ширины, длины, толщины, веса и/или ориентации документа, группы документов и/или наполненного или укомплектованного конверта. Дополнительно преобразователь может управляться при сравнении по меньшей мере части рабочей деятельности преобразователя и виртуального преобразователя.
Хотя настоящее изобретение было проиллюстрировано описанием различных вариантов осуществления и примеров и хотя эти варианты осуществления были описаны очень подробно, намерением заявителей не является ограничение или любым образом установление границ объема приложенной формулы изобретения этими подробностями. Дополнительные преимущества и модификации будут полностью очевидны специалистам в данной области техники. Таким образом, изобретение в его более широких аспектах не ограничено отдельными показанными и описанными подробностями устройства и способа. В частности, любые этапы блок-схем последовательностей операций способов могут быть удалены, дополнены, выполнены подобными друг другу, объединены, или иным способом изменены в соответствии с принципами настоящего изобретения. Например, хотя этапы Фиг.13-17 проиллюстрированы как имеющие определенный порядок, любые из этапов Фиг.13-17 могут объединяться, выполняться параллельно и/или изменить порядок, не выходя из объема изобретения. Соответственно, могут быть осуществлены отступления от этих подробностей, не выходя из сущности и объема изобретения.
Другие модификации должны быть понятны специалисту в данной области техники. Следовательно, изобретение заключается в приложенной далее формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ПРЕДВАРИТЕЛЬНОЙ РАСПРЕДЕЛЕННОЙ ОБРАБОТКИ СЕНСОРНЫХ ДАННЫХ И УПРАВЛЕНИЯ ОБЛАСТЯМИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2595760C2 |
| СПОСОБ ДЛЯ РАЗМЕЩЕНИЯ РАБОЧИХ НАГРУЗОК В ПРОГРАММНО-ОПРЕДЕЛЯЕМОЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМЕ | 2016 |
|
RU2730534C2 |
| ЕДИНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ БУРОВЫХ УСТАНОВОК | 2016 |
|
RU2713072C2 |
| ПРОГРАММНО-ОПРЕДЕЛЯЕМАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА И АРХИТЕКТУРА | 2016 |
|
RU2729885C2 |
| СИСТЕМА УПРАВЛЕНИЯ БУРОВОЙ УСТАНОВКОЙ | 2016 |
|
RU2667545C1 |
| ЦЕНТРАЛИЗОВАННОЕ УПРАВЛЕНИЕ ПРОГРАММНО-ОПРЕДЕЛЯЕМОЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМОЙ | 2016 |
|
RU2747966C2 |
| СЛУЖБА IoT-БЕЗОПАСНОСТИ | 2017 |
|
RU2756693C2 |
| СИСТЕМА, СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ УДАЛЕННЫМИ ПРИБОРАМИ | 2006 |
|
RU2426234C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРОННОГО БАНКОВСКОГО АВТОМАТА РЕЦИКЛИРОВАНИЯ ВАЛЮТЫ | 1998 |
|
RU2189636C2 |
| АРХИТЕКТУРА ОРГАНИЗАЦИИ ПРОМЫШЛЕННЫХ ПРОГРАММНО-ОПРЕДЕЛЯЕМЫХ СЕТЕЙ ДЛЯ РАЗВЕРТЫВАНИЯ В ПРОГРАММНО-ОПРЕДЕЛЯЕМОЙ АВТОМАТИЗИРОВАННОЙ СИСТЕМЕ | 2017 |
|
RU2737480C2 |
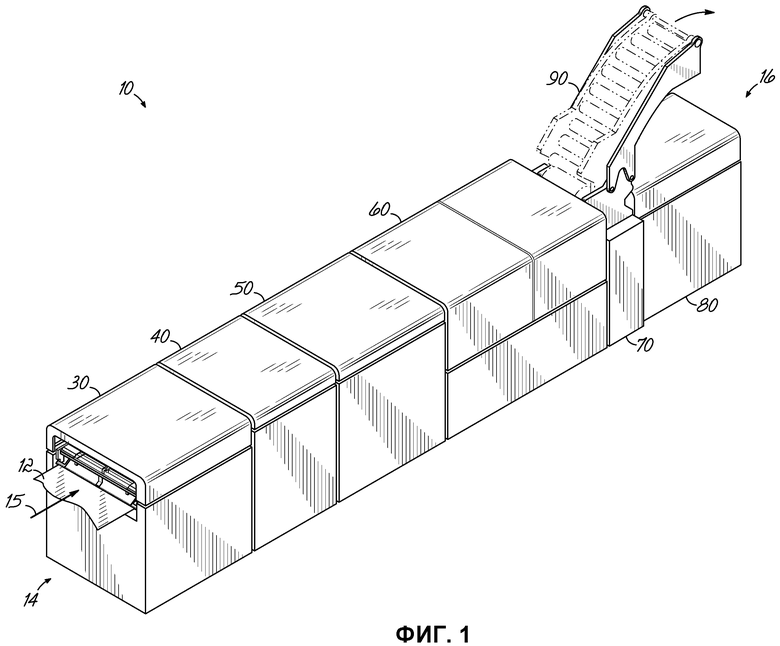
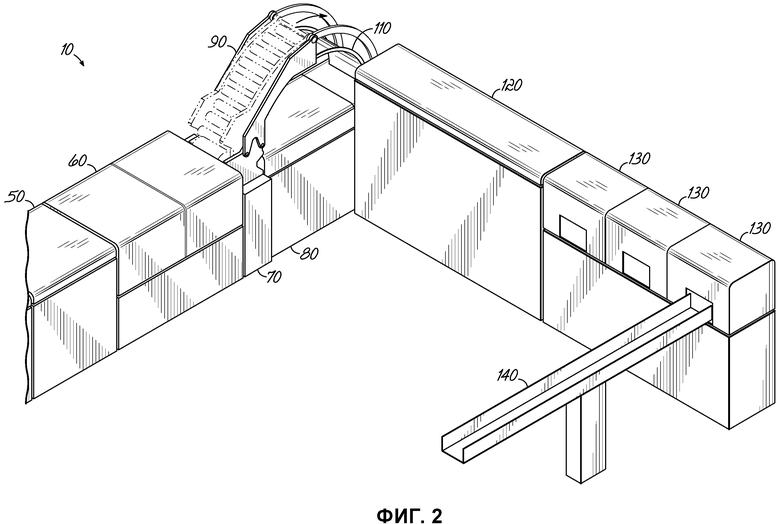
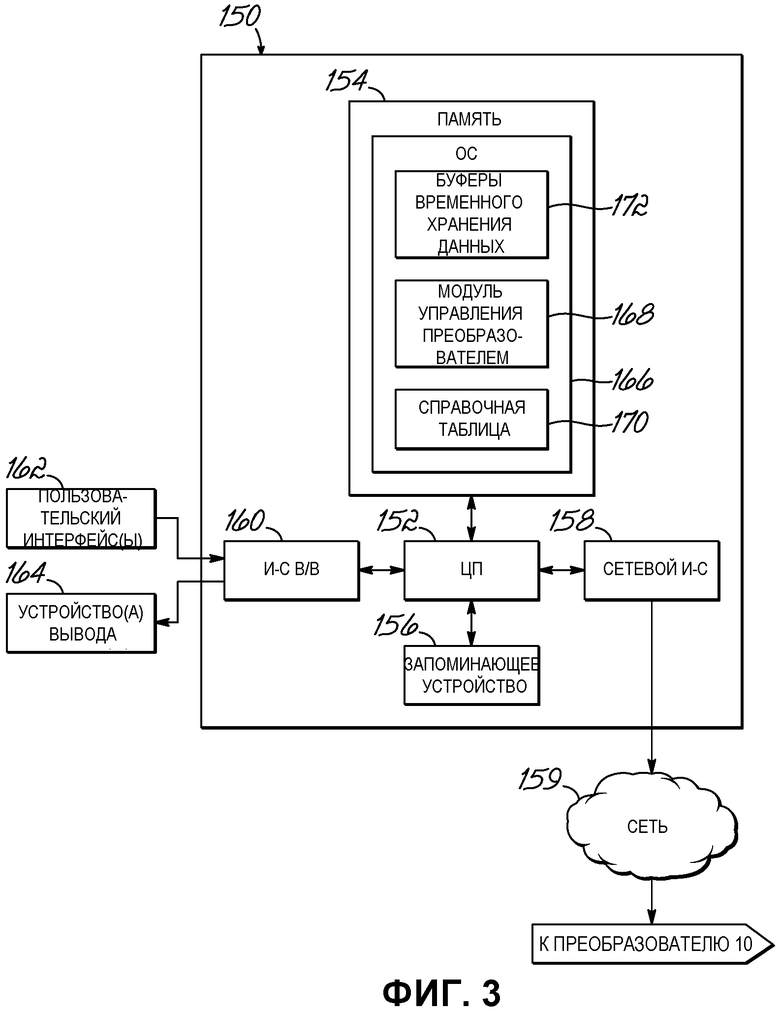
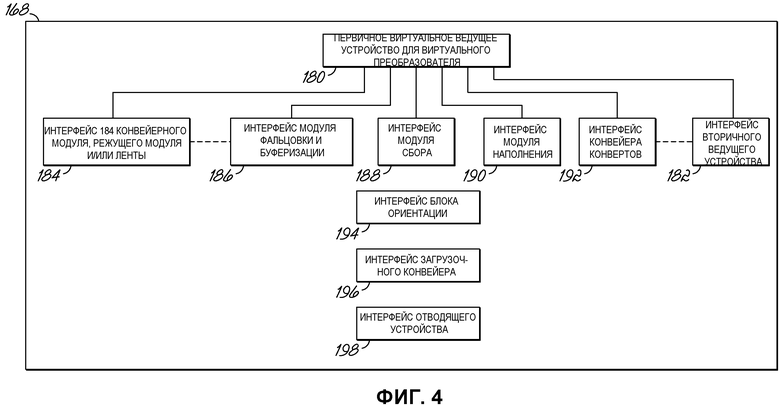
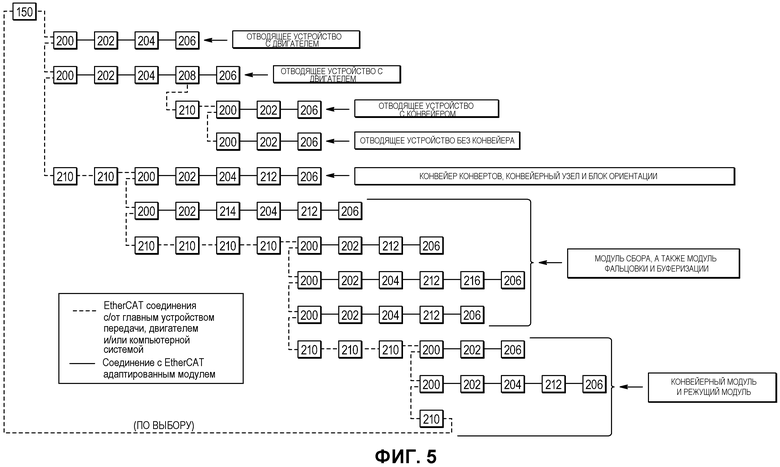
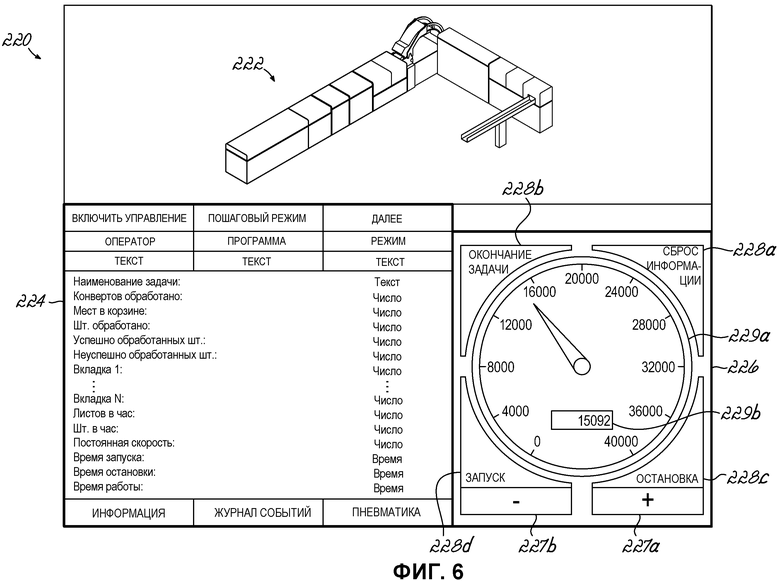
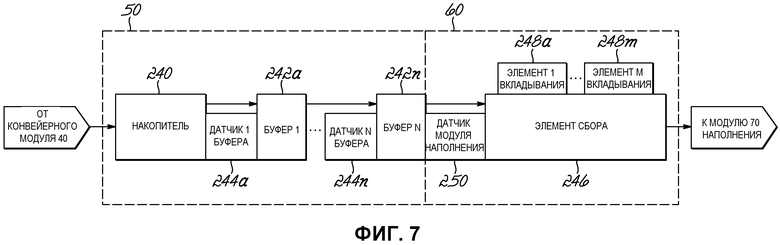
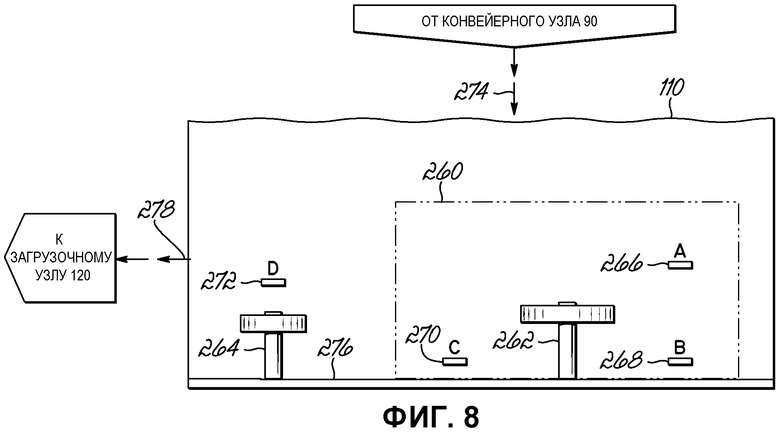
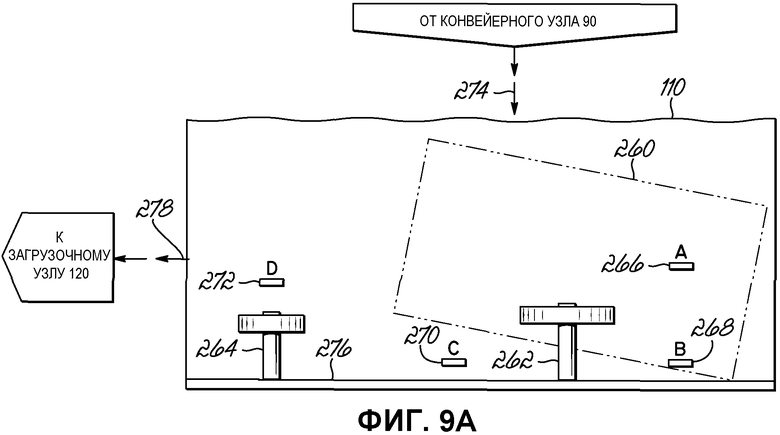
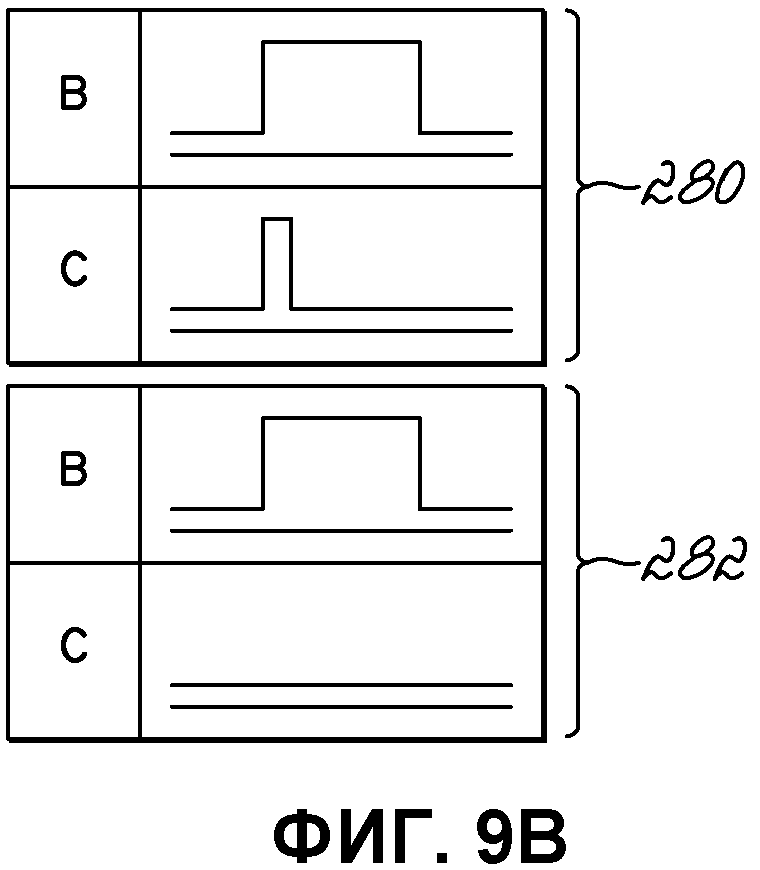
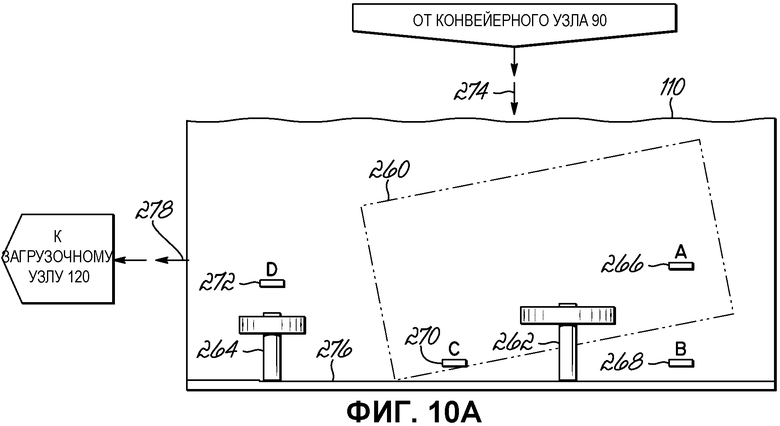
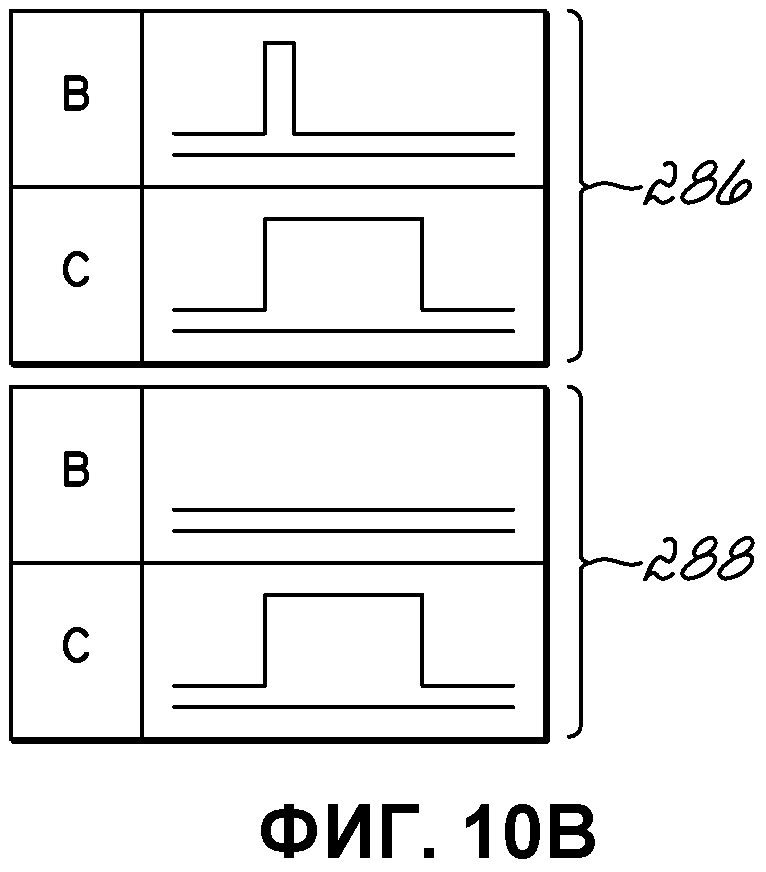
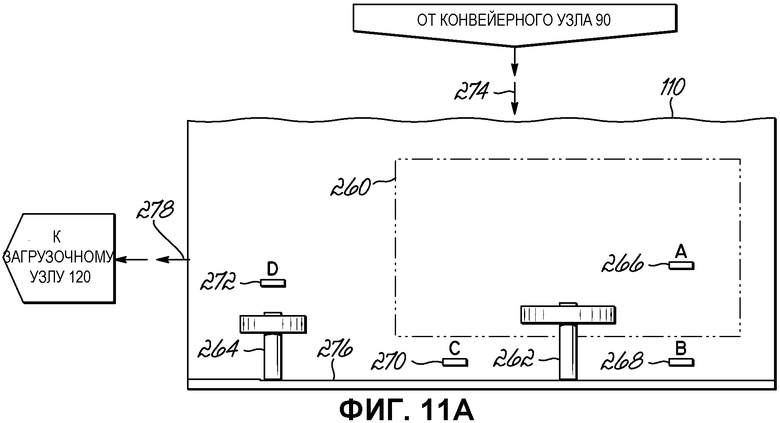
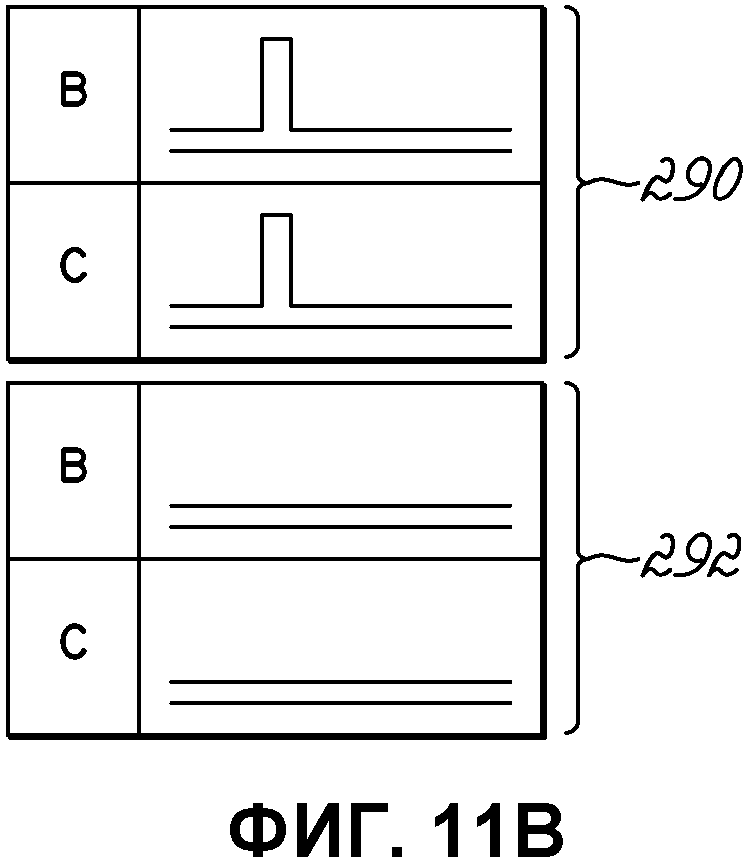
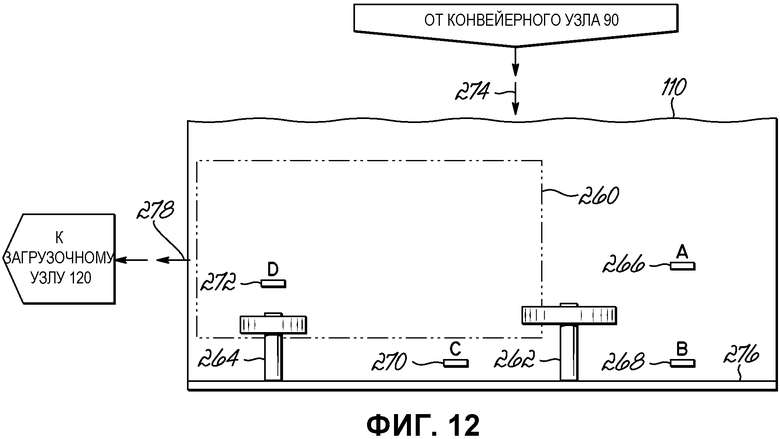
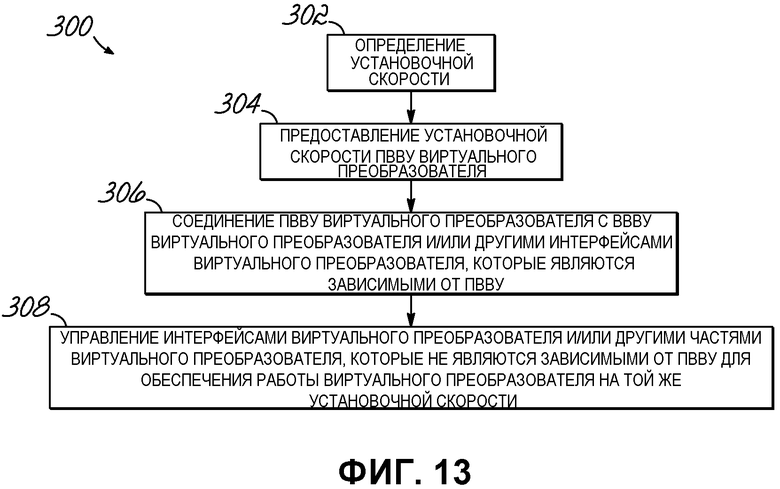
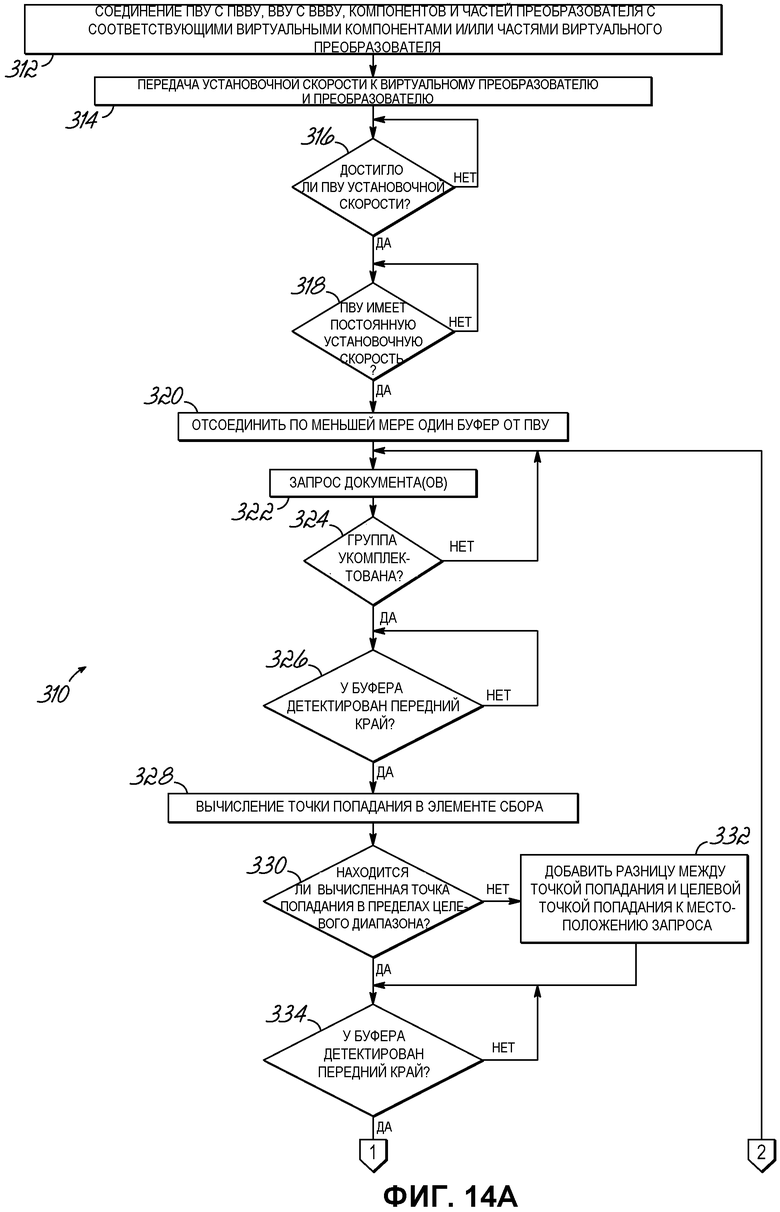
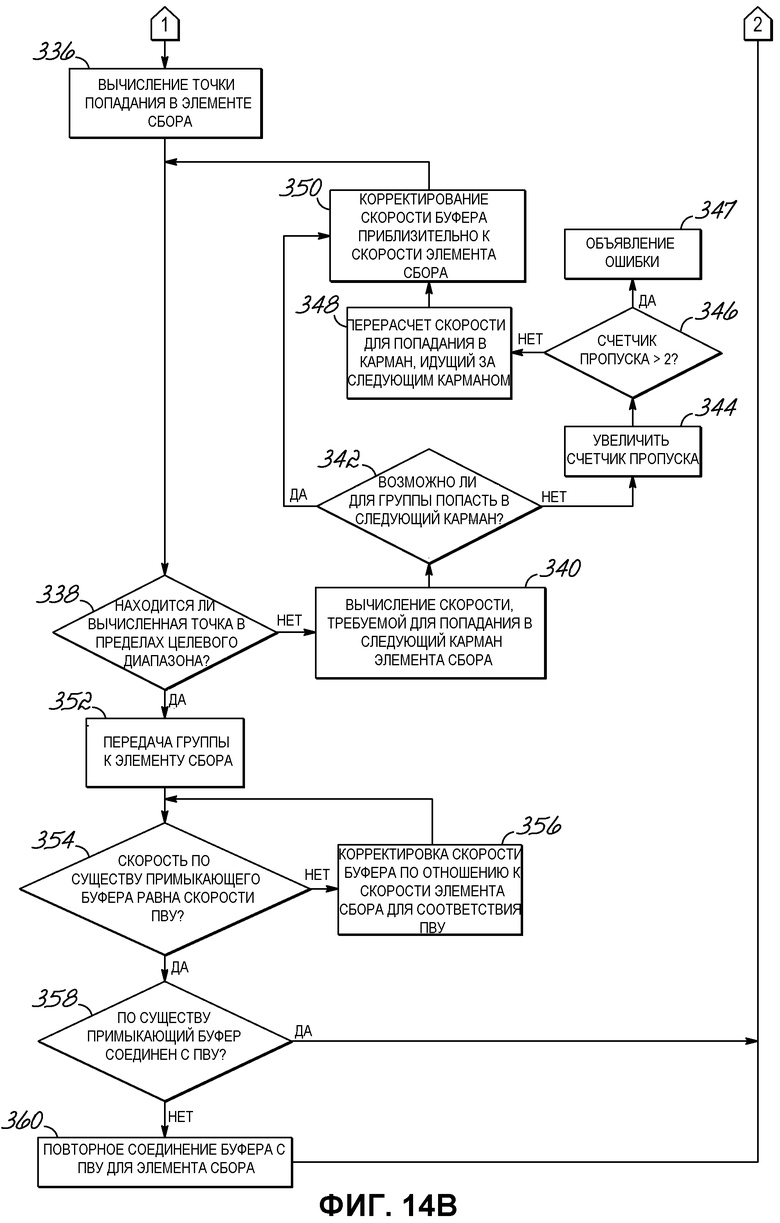
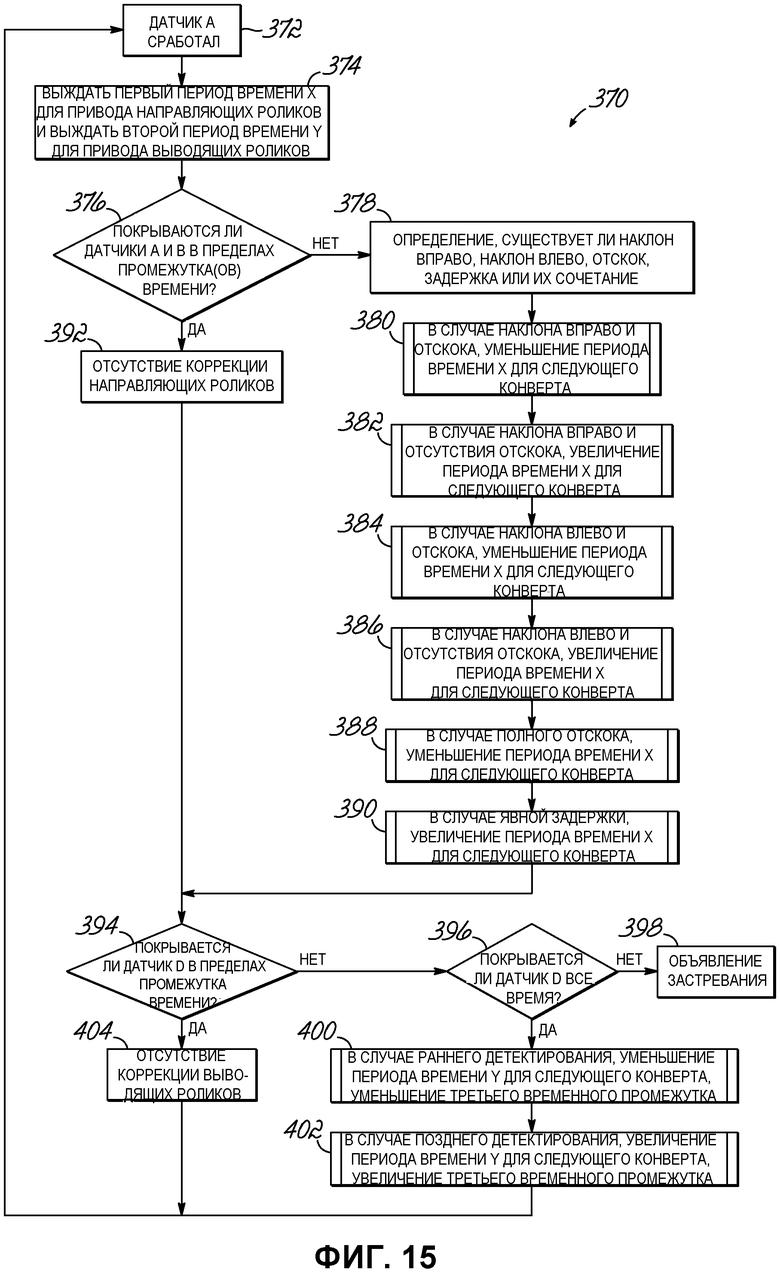
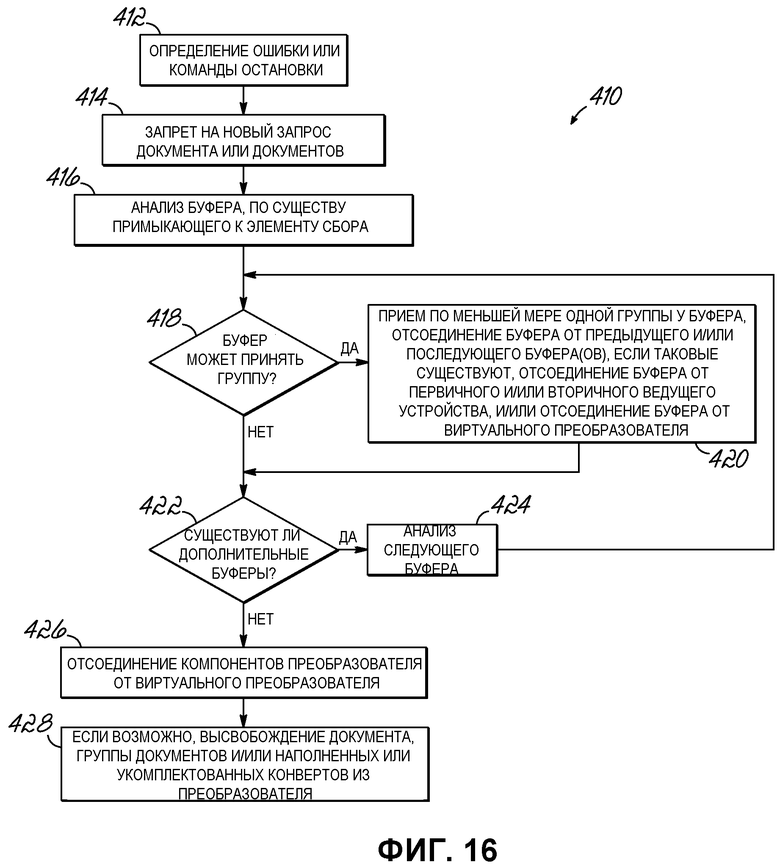
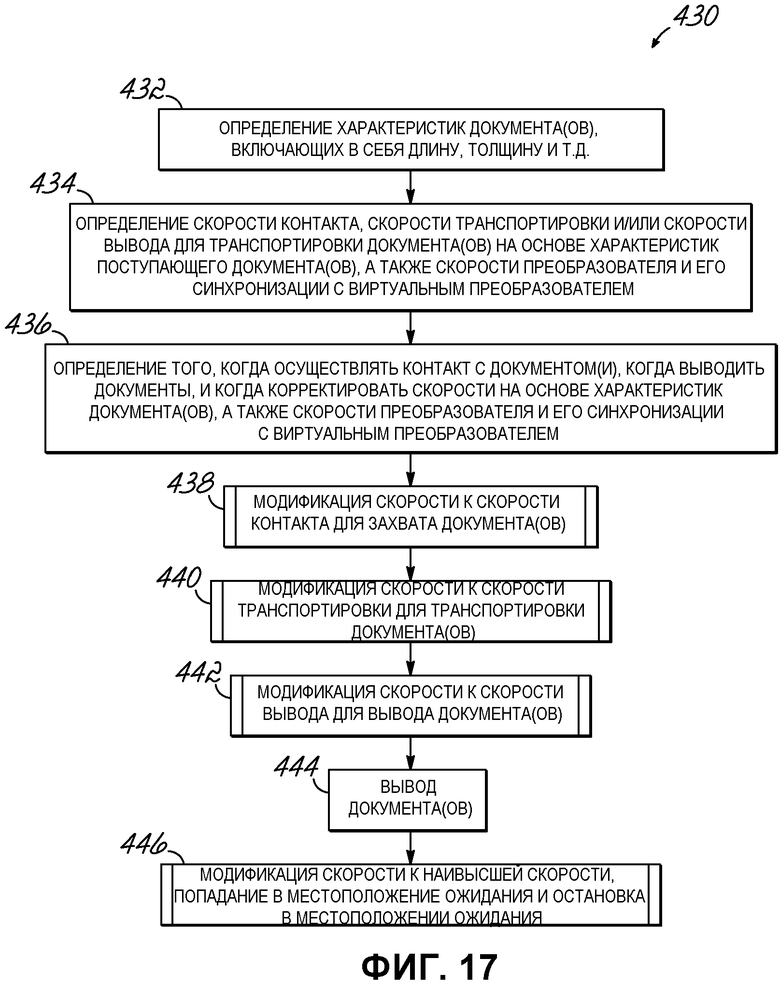
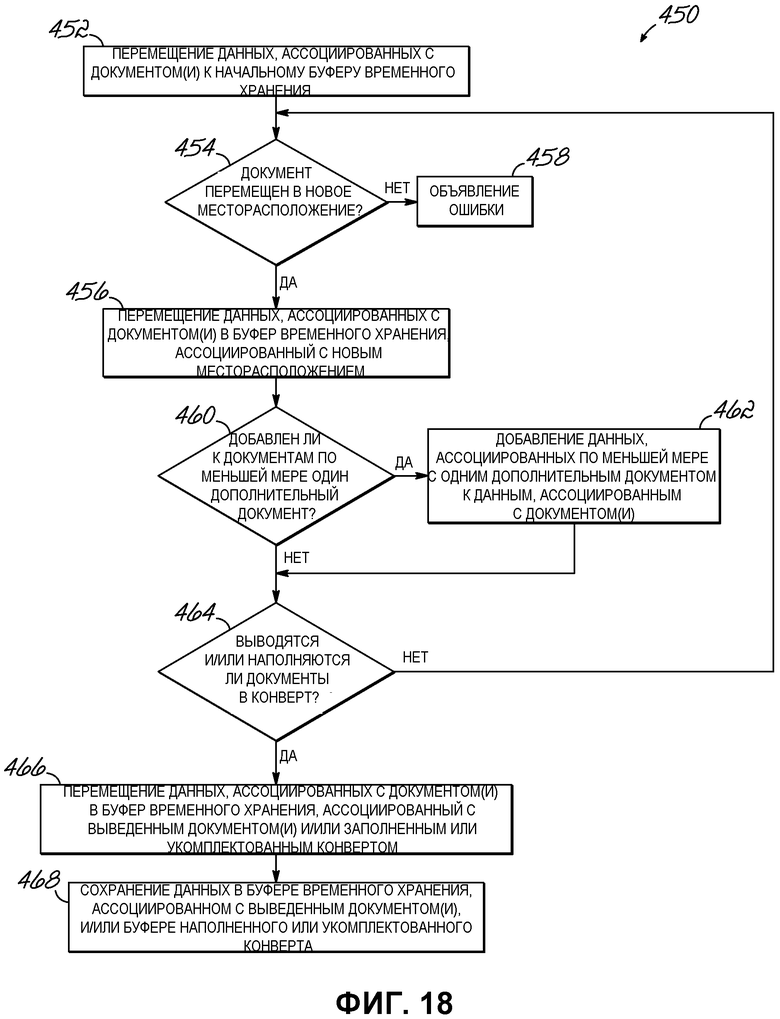
Устройство для наполнения конвертов содержит множество первичных приводов, множество датчиков, расположенных по всему устройству, и центральный контроллер. При этом множество первичных приводов, множество датчиков и центральный контроллер взаимосвязаны с возможностью функционирования таким образом, что центральный контроллер непосредственно принимает сигналы от множества датчиков и множества первичных приводов для управления в реальном масштабе времени по меньшей мере одним первичным приводом из множества первичных приводов на основе определяемого перемещения по меньшей мере одного отдельного листа материала, стопы отдельных листов материала или наполненного конверта через по меньшей мере участок устройства. Предложенное устройство улучшает управление преобразующим оборудованием. 2 н. и 15 з.п. ф-лы, 18 ил.
1. Устройство для наполнения конвертов, содержащее:
множество первичных приводов (262, 264);
множество датчиков (250, 266, 268, 270, 272), расположенных по всему устройству; и
центральный контроллер (150);
при этом множество первичных приводов (262, 264), множество датчиков (250, 266, 268, 270, 272) и центральный контроллер (150) взаимосвязаны с возможностью функционирования таким образом, что центральный контроллер (150) непосредственно принимает сигналы от множества датчиков (250, 266, 268, 270, 272) и множества первичных приводов (262, 264) для управления в реальном масштабе времени по меньшей мере одним первичным приводом из множества первичных приводов (262, 264) на основе определяемого перемещения по меньшей мере одного отдельного листа материала, стопы отдельных листов материала или наполненного конверта через по меньшей мере участок устройства.
2. Устройство по п.1, в котором множество первичных приводов (262, 264), множество датчиков (250, 266, 268, 270, 272) и центральный контроллер (150) выполнены с возможностью поддерживать связь посредством кадрированного сетевого протокола связи промышленной сети.
3. Устройство по п.1, в котором центральный контроллер (150) выполнен с возможностью выборочно корректировать скорость указанного по меньшей мере одного первичного привода (262, 264) на основе определяемого перемещения по меньшей мере одного из отдельных листов материала, стопы отдельных листов материала или наполненного конверта по меньшей мере через указанный по меньшей мере участок устройства.
4. Устройство по п.1, дополнительно содержащее:
режущий модуль (30), управляемый центральным контроллером и выполненный с возможностью разрезания полотна материала на множество отдельных листов материала; и/или
модуль (50) фальцовки и буферизации, управляемый центральным контроллером и выполненный с возможностью фальцевать отдельный лист материала, где указанный отдельный лист материала является вторым отдельным листом материала, причем центральный контроллер выполнен с возможностью запрашивать второй отдельный лист материала в ответ на фальцевание первого отдельного листа материала в модуле (50) фальцовки и буферизации,
при этом модуль (50) фальцовки и буферизации включает в себя: по меньшей мере один буфер (242), причем центральный контроллер (150) выполнен с возможностью, в ответ по меньшей мере на одну ошибку или команду по остановке устройства, помещать по меньшей мере один из отдельных листов материала или стопу отдельных листов материала в указанный по меньшей мере один буфер (242) и прекращать работу устройства; и
по меньшей мере один накопитель (240), выполненный с возможностью выборочно накапливать по меньшей мере два отдельных сфальцованных или развернутых листа материала в стопу отдельных листов материала.
5. Устройство по п.1, дополнительно содержащее:
модуль (60) сбора, управляемый центральным контроллером (150) и выполненный с возможностью принимать стопу отдельных листов материала для наполнения конверта и предоставления по меньшей мере одной вкладки для стопы отдельных листов материала; и/или
модуль (70) наполнения, управляемый центральным контроллером (15) и выполненный с возможностью выборочного вкладывания единичного отдельного листа материала или стопы отдельных листов материала в конверт; и/или
блок (110) ориентации, управляемый центральным контроллером (150) и выполненный с возможностью принимать наполненный конверт и переориентировать направление движения наполненного конверта,
при этом центральный контроллер (150) выполнен с возможностью отслеживать характеристики перемещения наполненного конверта в блоке (110) ориентации, определять, подвергся ли конверт по меньшей мере одному из наклона вправо, наклона влево, отскоку или задержке, и применять коррекцию для второго наполненного конверта на основе такого определения, и блок (110) ориентации предпочтительно содержит по меньшей мере один ролик (262, 264), при этом осуществление коррекции включает в себя изменение временного интервала привода указанного по меньшей мере одного ролика (262, 264).
6. Устройство по п.1, в котором центральный контроллер (150) выполнен с возможностью управлять устройством для вывода множества наполненных конвертов при скорости вплоть до около 40000 наполненных конвертов в час и/или центральный контроллер (15) выполнен с возможностью моделировать работу множества первичных приводов.
7. Устройство по п.1, в котором указанный по меньшей мере участок устройства является первым участком устройства, при этом центральный контроллер (150) включает в себя:
память (154), где память (154) подразделена на множество областей, которые в свою очередь ассоциированы с множеством соответствующих участков устройства, и при этом центральный контроллер (150) выполнен с возможностью отслеживать информацию, ассоциированную с отдельным листом материала, по мере того как этот отдельный лист материала перемещается от первого участка устройства ко второму участку устройства, перемещением информации из первой области памяти, ассоциированной с первым участком устройства, во вторую область памяти, ассоциированную со вторым участком устройства.
8. Устройство по п.1, дополнительно содержащее:
средство кадрированного сетевого протокола связи промышленной сети для работоспособной взаимосвязи множества первичных приводов, множества датчиков и центрального контроллера (150).
9. Устройство по п.1, дополнительно содержащее:
подающее средство для подачи полотна материала в режущее средство для разрезания упомянутого полотна материала на множество листов, режущее средство (30) для разрезания полотна материала на множество отдельных листов материала;
средство (50) фальцевания для фальцевания по меньшей мере одного отдельного листа материала или стопы отдельных листов материала;
средство (50) буферизации для буферизации по меньшей мере одного отдельного листа материала или стопы отдельных листов материала;
средство (240) накопления для накопления по меньшей мере двух отдельных листов материала в стопе отдельных листов материала;
средства вкладывания для вкладывания по меньшей мере одной вкладки в стопу отдельных листов материала и
средства (70) наполнения для вкладывания единичного отдельного листа материала или стопы отдельных листов материала в конверт.
10. Способ управления устройством для наполнения конвертов при помощи центрального контроллера (150) такого типа, который включает в себя по меньшей мере одно устройство обработки данных и память (154), при этом способ содержит этапы, на которых:
принимают сигналы в центральном контроллере от множества первичных приводов (262, 264) и множества датчиков (250, 266, 268, 270, 272), функционально связанных с центральным контроллером (150);
определяют перемещение по меньшей мере одного отдельного листа материала, стопы отдельных листов материала или наполненного конверта по меньшей мере через участок устройства и
выборочно управляют работой по меньшей мере одного первичного привода из множества первичных приводов (262, 264) в реальном масштабе времени на основе определяемого перемещения,
при этом способ включает этап сообщения сигналов из множества первичных приводов и множества датчиков центральному контроллеру (150) через кадрированный сетевой протокол связи промышленной сети.
11. Способ по п.10, дополнительно содержащий этап, на котором:
выборочно корректируют на основе определяемого перемещения по меньшей мере либо (a) скорость по меньшей мере одного первичного привода, либо (b) период времени для начального контакта по меньшей мере одного первичного привода с отдельным листом материала.
12. Способ по п.10, дополнительно содержащий этап, на котором:
отслеживают характеристики перемещения наполненного конверта в блоке (110) ориентации и
в ответ на определение того, что наполненный конверт подвергся по меньшей мере одному из наклона вправо, наклона влево, отскока или задержки, применяют коррекцию ко второму наполненному конверту на основе того, подвергся ли первый наполненный конверт наклону вправо, наклону влево, отскоку или задержке.
13. Способ по п.12, в котором применение коррекции ко второму наполненному конверту включает в себя изменение временного интервала приведения в действие по меньшей мере одного ролика (262, 264) блока (110) ориентации.
14. Способ по п.10, дополнительно содержащий этапы, на которых:
моделируют работу устройства и
синхронизируют работу устройства с моделированной работой устройства.
15. Способ по п.14, в котором выборочное управление работой по меньшей мере одного первичного привода из множества первичных приводов в реальном масштабе времени включает в себя выборочную коррекцию скорости по меньшей мере одного первичного привода в ответ на определение того, что работа устройства не синхронизирована с моделированной работой устройства.
16. Способ по п.14, в котором синхронизация работы устройства с моделированной работой устройства включает в себя:
синхронизацию моделированной работы первичного виртуального ведущего устройства моделированной работы с работой первого соответствующего участка устройства и
синхронизацию моделированной работы вторичного виртуального ведущего устройства моделированной работы с работой второго соответствующего участка устройства.
17. Способ по п.10, дополнительно содержащий этап, на котором:
отслеживают информацию, ассоциированную с отдельным листом материала, когда отдельный лист материала перемещается от первого участка устройства ко второму участку устройства, перемещением информации из первой области памяти, ассоциированной с первым участком устройства, ко второй области памяти, ассоциированной со вторым участком устройства.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| US 2004123571 A1, 01.07.2004 | |||
| Способ соединения деталей одежды | 1989 |
|
SU1683651A1 |

