ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники
[0001] Изобретение относится к устройству управления и способу управления для гибридного транспортного средства, содержащего дифференциальный механизм и ступенчатую трансмиссию, расположенные последовательно.
2. Описание предшествующего уровня техники
[0002] В патентной заявке Японии №2014-223888 (JP 2014-223888 А) раскрывается устройство управления для гибридного транспортного средства, содержащее двигатель, дифференциальный механизм, вторую вращающуюся машину, ступенчатую трансмиссию и аккумуляторное устройство. В патентной заявке JP 2014-223888 А дифференциальный механизм имеет три вращающихся элемента, с которыми соответственно соединены двигатель, первая вращающаяся машина и промежуточный элемент трансмиссии. Вторая вращающаяся машина соединена с промежуточным элементом трансмиссии с возможностью передачи мощности. Ступенчатая трансмиссия образует часть пути передачи мощности между промежуточным элементом трансмиссии и ведущими колесами и выполнена с возможностью вхождения в зацепление с заранее определенными устройствами зацепления из множества, чтобы установить соответствующее положение передачи из множества. Аккумуляторное устройство выполнено с возможностью подачи и получения электрической мощности на и от первой и второй вращающейся машины. В патентной заявке JP 2014-223888 А раскрыто, что крутящий момент первой вращающейся машины и крутящий момент второй вращающейся машины регулируют на основе крутящего момента двигателя и максимального крутящего момента ступенчатой трансмиссии так, что скорость изменения частоты вращения второй вращающейся машины и скорость изменения частоты вращения двигателя достигают заданных значений во время переключения ступенчатой трансмиссии.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Если мощность аккумуляторного устройства при переключении ступенчатой трансмиссии мала, выходной крутящий момент первой вращающейся машины и выходной крутящий момент второй вращающейся машины ограничены в связи с ограничением мощности аккумуляторного устройства. Затем требуемый выходной крутящий момент первой вращающейся машины или требуемый выходной крутящий момент второй вращающейся машины не достигаются при переключении ступенчатой трансмиссии так, что скорость изменения частоты вращения двигателя может не регулироваться надлежащим образом до заданного значения. Так как скорость изменения частоты вращения двигателя отражает состояние переключения всей трансмиссии, соединяющей дифференциальный механизм со ступенчатой трансмиссией, если скорость изменения частоты вращения двигателя не может регулироваться надлежащим образом до заданного значения, это означает, что переключение всей трансмиссии не может быть выполнено надлежащим образом.
[0004] Изобретение обеспечивает устройство управления и способ управления для гибридного транспортного средства, которые могут надлежащим образом переключать всю трансмиссию, соединяющую дифференциальный механизм и ступенчатую трансмиссию, независимо от ограничения мощности аккумуляторного устройства.
[0005] Первым аспектом изобретения является устройство управления для гибридного автомобиля. Гибридный автомобиль содержит двигатель, дифференциальный механизм, ведущее колесо, первую вращающуюся машину, вторую вращающуюся машину, ступенчатую трансмиссию и аккумуляторное устройство. Дифференциальный механизм содержит первый вращающийся элемент, с которым соединен двигатель с возможностью передачи мощности, второй вращающийся элемент, с которым соединена первая вращающаяся машина с возможностью передачи мощности, и третий вращающийся элемент, с которым соединен промежуточный элемент трансмиссии. Вторая вращающаяся машина соединена с промежуточным элементом трансмиссии с возможностью передачи мощности. Ступенчатая трансмиссия является частью пути передачи мощности между промежуточным элементом трансмиссии и ведущим колесом. Ступенчатая трансмиссия выполнена с возможностью введения в зацепление заранее определенных устройств зацепления из множества зацепления так, чтобы установить соответствующее положение передачи из множества положений. Аккумуляторное устройство выполнено с возможностью подачи электрической мощности к первой вращающейся машине и второй вращающейся машине, и получения электрической мощности от первой вращающейся машины и второй вращающейся машины. Устройство управления содержит электронный блок управления. Электронный блок управления выполнен с возможностью управления во время переключения передачи ступенчатой трансмиссии расцеплением устройства зацепления на стороне расцепления из числа заранее определенных устройств зацепления, устанавливающих положение передачи перед переключением, и зацепления устройства зацепления на стороне зацепления из числа заранее определенных устройств зацепления, устанавливающих положение передачи после переключения так, что изменяется положение передачи, установленное ступенчатой трансмиссией. Электронный блок управления выполнен с возможностью управления во время переключения ступенчатой трансмиссии выходным крутящим моментом первой вращающейся машины и крутящим моментом второй вращающейся машины на основе выходного крутящего момента двигателя и крутящего момента трансмиссии устройства зацепления на стороне хода переключения, что скорость изменения частоты вращения второй вращающейся машины и скорость изменения частоты вращения двигателя достигают соответствующих заданных значений. Устройство зацепления на стороне хода переключения, является устройством зацепления на стороне, продвигающей переключение, и является одним из следующих устройств: устройство зацепления на стороне расцепления и устройств зацепления на стороне зацепления. Электронный блок управления выполнен с возможностью устанавливать крутящий момент трансмиссии устройства зацепления на стороне хода переключения на основе мощности двигателя, мощности, необходимой для переключения дифференциального механизма и ступенчатой трансмиссии, и мощности аккумуляторного устройства так, что предотвращается ограничение выходного крутящего момента первой вращающейся машины и выходного крутящего момента второй вращающейся машины в связи с ограничением мощности аккумуляторного устройства при переключении ступенчатой трансмиссии.
[0006] При такой конфигурации крутящий момент трансмиссии устройства зацепления на стороне хода переключения устанавливают на основе мощности двигателя, мощности, необходимой для хода переключения дифференциального механизма и ступенчатой трансмиссии, и мощности аккумуляторного устройства так, что предотвращается ограничение выходного крутящего момента первой вращающейся машины и выходного крутящего момента второй вращающейся машины в связи с ограничением мощности аккумуляторного устройства при переключении ступенчатой трансмиссии. Следовательно, ступенчатая трансмиссия переключается с крутящим моментом трансмиссии устройства зацепления на стороне хода переключения, в котором учитывается баланс входной-выходной соответствующих мощностей. В результате, даже если мощность аккумуляторного устройства ограничена при переключении ступенчатой трансмиссии, требуемый выходной крутящий момент первой вращающейся машины и требуемый выходной крутящий момент второй вращающейся машины, как правило, достигаются, чтобы управление могло быть выполнено надлежащим образом для достижения скоростью изменения частоты вращения двигателя заданного значения. Таким образом, переключение всей трансмиссии, соединяющей дифференциальный механизм и ступенчатую трансмиссию, может быть выполнено надлежащим образом, независимо от ограничения мощности аккумуляторного устройства.
[0007] В раскрытом выше устройстве управления электронный блок управления может быть выполнен с возможностью определения того, был ли достигнут баланс входной-выходной мощности двигателя, мощность, необходимая для хода переключения, мощность аккумуляторного устройства и мощность передачи устройства зацепления на стороне хода переключения. Если электронный блок управления определяет, что баланс входа-выхода не достигнут, электронный блок управления может быть выполнен с возможностью изменения мощности двигателя таким образом, что достигается баланс входной-выходной мощности. Электронный блок управления может быть выполнен с возможностью использования измененной мощности двигателя как мощности двигателя, служащей в качестве основы при установке крутящего момента трансмиссии устройства зацепления на стороне хода переключения.
[0008] При такой конфигурации выполняется переключение ступенчатой трансмиссии, при котором дополнительно учитывается баланс входной-выходной соответствующих мощностей. Следовательно, переключение всей трансмиссии может быть выполнено точнее.
[0009] В раскрытом выше устройстве управления электронный блок управления может быть выполнен с возможностью устанавливать крутящий момент трансмиссии устройства зацепления на стороне хода переключения на основе заранее установленного соотношения, где множество уровней, соответствующих величинам мощности двигателя, мощности, необходимой для хода переключения, и мощности аккумуляторного устройства, используются в качестве параметров так что крутящий момент трансмиссии устройства зацепления на стороне хода переключения читается как считанное значение согласно параметрам.
[0010] Когда крутящий момент трансмиссии устройства зацепления на стороне хода переключения устанавливается на основе самих числовых значений соответствующих мощностей, заранее установленное соотношение (схема) становится высокоразмерным, и поэтому адаптация становится сложной. Наоборот, согласно раскрытой выше конфигурации за счет установки крутящего момента трансмиссии зацепляющего устройства на стороне хода переключения с использованием множества уровней, соответствующих величинам каждой из соответствующих мощностей (т.е. посредством снижения количества параметров), заранее установленное соотношение может быть низкоразмерным для упрощения адаптации.
[0011] В раскрытом выше устройстве управления электронный блок управления может быть выполнен с возможностью выполнения при переключении на повышающую передачу ступенчатой трансмиссии переключения на повышающую передачу всей трансмиссии, где дифференциальный механизм и ступенчатая трансмиссия расположены последовательно. Электронный блок управления может быть выполнен с возможностью выполнения перехода на понижающую передачу всей трансмиссии, когда ступенчатую трансмиссию переключают на понижающую передачу. Количество уровней переключения на понижающую передачу ступенчатой трансмиссии с включенным двигателем может быть больше, чем количество уровней переключения на повышающую передачу ступенчатой трансмиссии с включенным двигателем.
[0012] При такой конфигурации переключение на понижающую передачу ступенчатой трансмиссии с включенным двигателем, которое является более сложным с точки зрения управления переключением, чем переключение на повышающую передачу ступенчатой трансмиссии с включенным двигателем, может быть выполнено надлежащим образом. Таким образом, так как количество параметров может быть изменено в соответствии с типом переключения (например, согласно степени сложности управления переключением), адаптация может быть более простой, так как управление переключением становится проще.
[0013] Вторым аспектом изобретения является способ управления гибридным автомобилем. Гибридный автомобиль содержит двигатель, дифференциальный механизм, ведущее колесо, первую вращающуюся машину, вторую вращающуюся машину, ступенчатую трансмиссию, аккумуляторное устройство и электронный блок управления. Дифференциальный механизм содержит первый вращающийся элемент, с которым соединен двигатель с возможностью передачи мощности, второй вращающийся элемент, с которым соединена первая вращающаяся машина с возможностью передачи мощности, и третий вращающийся элемент, с которым соединен промежуточный элемент трансмиссии. Вторая вращающаяся машина соединена с промежуточным элементом трансмиссии с возможностью передачи мощности. Ступенчатая трансмиссия является частью пути передачи мощности между промежуточным элементом трансмиссии и ведущим колесом. Ступенчатая трансмиссия выполнена с возможностью вхождения в зацепление с заранее определенными устройствами зацепления из множества, чтобы установить соответствующее положение передачи из множества. Аккумуляторное устройство выполнено с возможностью подачи электрической мощности к первой вращающейся машине и второй вращающейся машине, и получения электрической мощности от первой вращающейся машины и второй вращающейся машины. Способ управления содержит: управление с использованием электронного блока управления расцеплением устройства зацепления на стороне расцепления из числа заранее определенных устройств зацепления, устанавливающих положение передачи перед переключением и зацеплением устройства зацепления на стороне зацепления из числа заранее определенных устройств зацепления, устанавливающих положение передачи после переключения так, что изменяется положение передачи, установленное ступенчатой трансмиссией; управление с использованием электронного блока управления во время переключения передачи ступенчатой трансмиссии выходным крутящим моментом первой вращающейся машины и выходного крутящего момента второй вращающейся машины на основе выходного крутящего момента двигателя и крутящего момента трансмиссии устройства зацепления на стороне хода переключения так, что скорость изменения частоты вращения второй вращающейся машины и скорость изменения частоты вращения двигателя достигает соответствующих заданных значений; и установка с использованием электронного блока управления крутящего момента трансмиссии устройства зацепления на стороне хода переключения на основе мощности двигателя, мощности, необходимой для хода переключения дифференциального механизма и ступенчатой трансмиссии, и мощности аккумуляторного устройства так, что предотвращается ограничение выходного крутящего момента первой вращающейся машины и выходного крутящего момента второй вращающейся машины в связи с ограничением мощности аккумуляторного устройства при переключении ступенчатой трансмиссии. Устройство зацепления на стороне хода переключения является устройством зацепления на стороне, продвигающей переключение, и является одним из следующих устройств: устройство зацепления на стороне расцепления и устройство зацепления на стороне зацепления.
[0014] При такой конфигурации может быть получен такой же эффект, как и для раскрытого выше устройства управления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Отличительные признаки, преимущества, техническая и промышленная значимость примерных вариантов осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые обозначения относятся к одинаковым элементам:
ФИГ. 1 представляет собой схему для раскрытия схематической конфигурации приводной системы транспортного средства, содержащейся в транспортном средстве, к которому применяется изобретение, а также является схемой для объяснения функций управления и основной частью системы управления для различных элементов управления в транспортном средстве;
ФИГ. 2 является таблицей операций для раскрытия соотношения между операцией переключения механической ступенчатой трансмиссии, показанной на Фиг. 1, и комбинации операций устройств зацепления для использования в операции переключения;
ФИГ. 3 представляет собой номограмму, показывающую относительное соотношение частот вращения соответствующих вращающихся элементов в электрической бесступенчатой трансмиссии и механической ступенчатой трансмиссии;
ФИГ. 4 представляет собой график для раскрытия одного примера таблицы распределения положений передач, где множество положений виртуальных передач распределено по множеству положений передач АТ;
ФИГ. 5 представляет собой график, в котором положения передач АТ ступенчатой трансмиссии и положения виртуальных передач трансмиссии показаны на той же номограмме, что и на ФИГ. 3;
ФИГ. 6 представляет собой график для раскрытия одного примера схемы переключения положений виртуальной передачи для использования в управлении переключением множества положений виртуальных передач;
ФИГ. 7 представляет собой концептуальную схему баланса мощностей в системе виртуального управления переключением ступенчатой передачи трансмиссии 40, когда происходит переключение ступенчатой трансмиссии; и
ФИГ. 8 представляет собой блок-схему для раскрытия основной части операции управления электронного блока управления, т.е. операции управления для надлежащего выполнения переключения всей трансмиссии независимо от отграничения мощности аккумулятора.
ДЕТАЛЬНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0016] Частота вращения со каждого вращающегося элемента (например, двигателя, первой вращающейся машины, второй вращающейся машины, вращающихся элементов дифференциального механизма, промежуточного элемента трансмиссии и вращающихся элементов ступенчатой трансмиссии) может относиться к угловой скорости вращающегося элемента, и скорость изменения частоты вращения ω является скоростью изменения времени, т.е. производной по времени, частоты вращения, ω и, таким образом, угловым ускорением dω/dt вращающегося элемента, в то время как угловое ускорение dω/dt может быть задано  в числовой формуле.
в числовой формуле.
[0017] Далее вариант осуществления изобретения будет подробно раскрыт со ссылкой на чертежи.
[0018] ФИГ. 1 представляет собой схему для раскрытия схематической конфигурации приводной системы 12 транспортного средства 10, содержащейся в транспортном средстве, к которому применяется изобретение, а также является схемой для объяснения функций управления и основной частью системы управления для различных элементов управления в транспортном средстве 10. На ФИГ. 1 приводная система 12 транспортного средства содержит последовательно расположенные: двигатель 14, электрическую автоматическую бесступенчатую трансмиссию 18 (далее - «бесступенчатая трансмиссия 18») и механическую ступенчатую трансмиссию 20 (далее - «ступенчатая трансмиссия 20»). Бесступенчатая трансмиссия 18 расположена на общей оси в картере 16 трансмиссии (далее - «картер 16») как невращающийся элемент, соединенный с корпусом транспортного средства, и прямо или косвенно соединена с двигателем 14 амортизатором или т.п. (не показан). Ступенчатая трансмиссия 20 соединена с выходной стороной бесступенчатой трансмиссии 18. Приводная система 12 транспортного средства дополнительно содержит устройство 24 дифференциальной передачи, соединенное с выводным валом 22 как выходным вращающимся элементом ступенчатой трансмиссии 20, пару мостов 26, соединенных с устройством 24 дифференциальной передачи, и т.п. В приводной системе 12 транспортного средства мощность (синоним крутящего момента или силы, при отсутствии определенных отличий между ними), выходящая от двигателя 14 или раскрытой ниже второй вращающейся машины MG2, передается ступенчатой трансмиссии 20, а затем - от ступенчатой трансмиссии 20 ведущим колесам 28 транспортного средства 10 устройством 24 дифференциальной передачи и т.п. Приводная система 12 транспортного средства надлежащим образом используется, например, в транспортном средстве с переднемоторной, заднеприводной компоновкой (FR), где приводная система 12 транспортного средства установлена в транспортном средстве продольно. Бесступенчатая трансмиссия 18, ступенчатая трансмиссия 20 и т.п. обычно выполнены симметричными относительно оси вращения (вышеуказанная общая ось) двигателя 14 и т.п., в то время как нижняя половина под осью вращения не показана на ФИГ. 1.
[0019] Двигатель 14 является источником мощности для движения транспортного средства 10 и двигателем внутреннего сгорания, например, бензиновым двигателем или дизельным двигателем. Рабочие состояния, такие как степень открытия дроссельной заслонки или количество впускного воздуха, количество подаваемого топлива и угол опережения зажигания двигателя 14 регулируются раскрытым ниже электронным блоком 80 управления так, что осуществляется управление крутящим моментом Те двигателя как выходным крутящим моментом двигателя 14. В данном варианте осуществления изобретения двигатель 14 соединен с бесступенчатой трансмиссией 18 не посредством устройства гидравлической трансмиссии, например таким как конвентер крутящего момента или гидравлической муфтой.
[0020] Бесступенчатая трансмиссия 18 содержит первую вращающуюся машину MG1, дифференциальный механизм 32 как механизм распределения мощности, который механически распределяет мощность двигателя 14 на первую вращающуюся машину MG1 и на промежуточный элемент 30 трансмиссии как выходной вращающийся элемент бесступенчатой трансмиссии 18, и вторую вращающуюся машину MG2, соединенную с промежуточным элементом 30 трансмиссии с возможностью передачи мощности. Бесступенчатая трансмиссия 18 является электрической бесступенчатой трансмиссией, в которой дифференциальное состояние дифференциального механизма 32 управляется посредством управления рабочим состоянием первой вращающейся машины MG1. Первая вращающаяся машина MG1 соответствует вращающейся машине для управления дифференциалом (электромотору для управления дифференциалом), в то время как вторая вращающаяся машина MG2 является электромотором, функционирующим как источник мощности и соответствующим вращающейся машине для движения транспортного средства (электромотор для движения транспортного средства). Транспортное средство 10 является гибридным автомобилем, содержащим двигатель 14 и вторую вращающуюся машину MG2 как источники мощности для движения автомобиля.
[0021] Первая вращающаяся машина MG1 и вторая вращающаяся машина MG2 являются электрической вращающейся машиной, обладающей функцией электромотора и функцией электрогенератора, т.е. так называемого мотор-генератор. Первая вращающаяся машина MG1 и вторая вращающаяся машина MG2 соответственно соединены с батареей 52 посредством инвертора 50. Батарея 52 и инвертор 50 входят в автомобиль 10. С инвертором 50, управляемым раскрытым ниже электронным блоком 80 управления, осуществляется управление крутящим моментом Tg MG1 и крутящим моментом Tm MG2 в качестве выходных крутящих моментов (крутящий момент мощности или восстанавливающий крутящий момент) первой вращающейся машины MG1 и второй вращающейся машины MG2. Батарея 52 является аккумуляторным устройством, подающим и получающим электрическую мощность на и от первой вращающейся машины MG1 и второй вращающейся машины MG2.
[0022] Дифференциальный механизм 32 выполнен как планетарное устройство с одной шестерней и оснащен солнечной шестерней S0, водилом СА0 и ведомой шестерней R0. Двигатель 14 соединен с водилом СА0 соединительным валом 34 с возможностью передачи мощности, первая вращающаяся машина MG1 соединена с солнечной шестерней S0 с возможностью передачи мощности, и вторая вращающаяся машина MG2 соединена с ведомой шестерней R0 с возможностью передачи мощности. В дифференциальном механизме 32 водило СА0 функционирует как входной элемент, солнечная шестерня S0 функционирует как элемент силы противодействия и ведомая шестерня R0 функционирует как выходной элемент.
[0023] Ступенчатая трансмиссия 20 является ступенчатой трансмиссией, образующей часть пути передачи мощности между промежуточным элементом 30 трансмиссии и ведущими колесами 28. Промежуточный элемент 30 трансмиссии также функционирует как входной вращающийся элемент ступенчатой трансмиссии 20. Так как вторая вращающаяся машина MG2 соединена с промежуточным элементом 30 трансмиссии, чтобы вращаться неразрывно с промежуточным элементом 30 трансмиссии, ступенчатая трансмиссия 20 является ступенчатой трансмиссией, образующей часть пути передачи мощности между второй вращающейся машиной MG2 и ведущими колесами 28. Ступенчатая трансмиссия 20 является известной планетарной автоматической трансмиссией, содержащей, например, множество планетарных устройств, т.е. первое устройство планетарной шестерни 36 и второе устройство планетарной шестерни 38, и множество устройств зацепления, т.е. муфту С1, муфту С2, тормоз В1 и тормоз В2 (далее - просто «устройства СВ зацепления», при отсутствии определенных отличий между ними).
[0024] Каждое устройство СВ зацепления является устройством зацепления с гидравлическим трением, например, многодисковой муфтой, однодисковой муфтой или тормозом, на который осуществляется давление гидравлическим приводом, или ленточным тормозом, закрепленным гидравлическим приводом. Максимальный крутящий момент (далее - «крутящий момент зацепления» или «крутящий момент муфты») Tcb каждого устройства СВ зацепления изменяется регулируемым гидравлическим давлением PRcb зацепления, которое выводится из соответствующего электромагнитного клапана с SL1 по SL4 в гидравлическом контуре 54 управления, содержащемся в автомобиле 10 так, что рабочее состояние (такое состояние как зацепление или расцепление) устройства СВ зацепления изменяется. Для передачи крутящего момента (например, АТ входной крутящий момент Ti в качестве входного крутящего момента, который вводится в ступенчатую трансмиссию 20) между промежуточным элементом 30 трансмиссии и выводным валом 22 без проскальзывания устройства СВ зацепления (т.е. без генерирования дифференциальной частоты вращения в устройстве СВ зацепления) требуемый крутящий момент Tcb зацепления, который вырабатывает величину передаваемого крутящего момента трансмиссии (далее - «крутящий момент трансмиссии зацепления» или «крутящий момент трансмиссии муфты»), который должен совместно использоваться каждым из устройств СВ зацепления (т.е. общий крутящий момент устройства СВ зацепления) относительно передаваемого крутящего момента. Однако, при крутящем моменте Tcb зацепления, образующем величину крутящего момента трансмиссии, крутящий момент трансмиссии не увеличивается даже за счет увеличения крутящего момента Tcb зацепления. Т.е. крутящий момент Tcb зацепления соответствует максимальному крутящему моменту, который может быть передан устройством СВ зацепления, в то время как крутящий момент трансмиссии соответствует крутящему моменту, который фактически передается устройством СВ зацепления. Поэтому в состоянии, когда дифференциальная частота вращения генерируется в устройстве СВ зацепления, крутящий момент Tcb зацепления и крутящий момент трансмиссии являются синонимами друг друга. В данном варианте осуществления изобретения крутящий момент трансмиссии устройства СВ зацепления в состоянии, когда дифференциальная частота вращения генерируется во время переключения передачи ступенчатой трансмиссии 20 (например, во время фазы инерции), задается крутящим моментом Tcb зацепления (т.е. задается крутящим моментом Tcb трансмиссии). Крутящий момент Tcb зацепления (или крутящий момент трансмиссии) и гидравлическое давление PRcb зацепления обычно пропорциональны друг относительно друга, например, в диапазоне, отличающемся от диапазона, где подается гидравлическое давление PRcb зацепления, необходимое для уплотнения устройства СВ зацепления.
[0025] В ступенчатой трансмиссии 20 вращающиеся элементы (солнечные шестерни S1 и S2, водила СА1 и СА2 и ведомые шестерни R1 и R2) первого устройства планетарной шестерни 36 и второго устройство планетарной шестерни 38 частично соединены друг с другом или с промежуточным элементом 30 трансмиссии, картером 16 или выводным валом 22 прямо или косвенно (или выборочно) устройством СВ зацепления или односторонней муфтой F1.
[0026] Ступенчатая трансмиссия 20 входит в зацепление с заранее определенными устройствами СВ зацепления, чтобы установить соответствующее положение из множества положений скорости (положений передачи) имеющим различное передаточное число оборотов (передаточный коэффициент) γat (= входная частота оборотов вращения AT ωi / выходная частота оборотов вращения ωо). В данном варианте осуществления изобретения положения передач, установленные ступенчатой трансмиссией 20, обозначены как «положения передач АТ». АТ входная частота вращения AT ωi является входной частотой оборотов вращения ступенчатой трансмиссии 20, которая является частотой вращения (угловой скоростью) входного вращающегося элемента ступенчатой трансмиссии 20 и равна по величине частоте вращения промежуточного элемента 30 трансмиссии, а также равна по величине частоте вращения MG2 ωm, которая является частотой вращения второй вращающейся машины MG2. Входная частота вращения AT ωi может быть задана частотой вращения MG2 ωm. Выходная частота вращения ωо является частотой вращения выводного вала 22, которая является выходной частотой вращения ступенчатой трансмиссии 20, а также выходной частотой вращения всей трансмиссии 40, как комбинации бесступенчатой трансмиссии 18 и ступенчатой трансмиссии 20.
[0027] Например, как показано в таблице операций зацепления на ФИГ. 2, ступенчатая трансмиссия 20 устанавливает как множество положений передачи АТ четыре передних положения передачи АТ, т.е. с положения первой передачи АТ (1-е на ФИГ. 2) по положение четвертой передачи АТ (4-е на ФИГ. 2). Передаточное число γat положения первой передачи АТ является наибольшим, в то время как передаточное число γat становится меньше на стороне большей скорости автомобиля (на большей стороне стороны положения четвертой передачи АТ). В таблице операций зацепления на ФИГ. 2 обобщено соотношение между всеми положениями передач АТ и рабочими состояниями устройств СВ зацепления (заранее определенные устройства зацепления, входящие в зацепление в каждом положении передачи АТ). На ФИГ. 2 «о» означает зацепление, «Δ» означает зацепление, когда вводится в работу тормоз двигателя или когда ступенчатую трансмиссию 20 переключают на понижающую передачу во время движения накатом, и пробел означает расцепление. Так как односторонняя муфта F1 установлена параллельно тормозу В2, устанавливающему положение первой передачи АТ, отсутствует необходимость вводить в зацепление тормоз В2 при запуске (ускорении) автомобиля. Для понижений передачи с выключенным двигателем, где понижение передачи определяется (требуется) в связи со снижением значения, зависящего от скорости автомобиля (например, скорости V автомобиля) во время движения с замедлением, вызванным снижением величины, требуемой приводом (например, положения педали акселератора θасс), или отключением акселератора (положение педали акселератора θасс нулевое или почти нулевое), снижение передачи ступенчатой трансмиссии 20 во время движения накатом - это снижение передачи, требуемое в состоянии движения с замедлением при выключенном акселераторе. При расцеплении всех устройств СВ зацепления ступенчатая трансмиссия 20 помещается в нейтральное положение, в котором не устанавливается ни одна из передач (т.е. нейтральное состояние, в котором прерывается передача мощности).
[0028] Управление расцеплением устройства зацепления на стороне расцепления из устройств СВ зацепления (т.е. из заранее определенных устройств зацепления, устанавливающих положение передачи АТ перед переключением) и зацеплением устройства зацепления на стороне зацепления из устройств СВ зацепления (т.е. из заранее определенных устройств зацепления, устанавливающих положение передачи АТ после переключения) осуществляется согласно управлению педалью акселератора водителем, скорости автомобиля V и т.д. раскрытым ниже электронным блоком 80 управления (в частности, раскрытым ниже блоком 82 управления переключением передач АТ, выполняющим управление переключением передач ступенчатой трансмиссии 20) так, что ступенчатая трансмиссия 20 изменяет положение передачи АТ, подлежащее установке (т.е. выборочно устанавливает множество положений передачи АТ). Т.е. при управлении переключением передач ступенчатой трансмиссии 20 ступенчатая трансмиссия 20 выполняет так называемое переключение от муфты к муфте, например, посредством зацепления и расцепления соответствующих устройств СВ зацепления (т.е. посредством переключения зацепления и расцепления устройств СВ зацепления). Например, при понижении передачи с положения второй передачи АТ до положения первой передачи АТ (заданной как «понижение передачи 2→1»), как показано в таблице операций зацепления на ФИГ. 2, тормоз В1 как устройство зацепления на стороне расцепления расцеплен, в то время как тормоз В2 как устройство зацепления на стороне зацепления находится в зацеплении. В этом случае регулируется переходное гидравлическое давление расцепления тормоза В1 и переходное гидравлическое давление тормоза В2 зацепления.
[0029] ФИГ. 3 представляет собой номограмму, показывающую относительную соотношение частот вращения соответствующих вращающихся элементов в бесступенчатой трансмиссии 18 и ступенчатой трансмиссии 20. На ФИГ. 3 три вертикальные линии Y1, Y2 и Y3, соответствующие трем вращающимся элементам дифференциального механизма 32, составляющего бесступенчатую трансмиссию 18, представляют собой в порядке слева направо ось g, представляющую частоту вращения солнечной шестерни S0, соответствующего второму вращающемуся элементу RE2, ось е, представляющую частоту вращения водила СА0, соответствующего первому вращающемуся элементу RE1, и ось m, представляющую частоту вращения ведомой шестерни R0 (т.е. входную частоту вращения ступенчатой трансмиссии 20), соответствующей третьему вращающемуся элементу RE3. Четыре вертикальные линии Y4, Y5, Y6 и Y7 ступенчатой трансмиссии 20 соответствуют в порядке слева направо оси, представляющей собой частоту вращения солнечной шестерни S2, соответствующего четвертому вращающемуся элементу RE4, оси, представляющей собой частоту вращения сдвоенных ведомой шестерни R1 и водила СА2 (т.е. частоту вращения выводного вала 22), соответствующих пятому вращающемуся элементу RE5, оси, представляющей собой частоту вращения сдвоенных водила СА1 и ведомой шестерни R2, соответствующих шестому вращающемуся элементу RE6, и оси, представляющей собой частоту вращения солнечной шестерни S1, соответствующего седьмому вращающемуся элементу RE7. Интервалы между двумя соседними вертикальными линиями Y1, Y2 и Y3 определяются согласно передаточному числу ρ0 дифференциального механизма 32. Интервалы между двумя соседними вертикальными линиями Y4, Y5, Y6 и Y7 определяются согласно соответствующим передаточным числам ρ1 и ρ2 первой планетарной шестерни 36 и второй планетарной шестерни 38. Для установления соотношения интервалов между вертикальными осями на номограмме, когда интервал между солнечной шестерней и водилом устанавливается соответствующим «1», интервал между водилом и ведомой шестерней устанавливается соответствующим передаточному числу ρ (= количество зубьев Zs солнечной шестерни/количество зубьев Zr ведомой шестерни) устройства планетарной шестерни планетарного устройства.
[0030] Согласно номограмме на ФИГ. 3, в дифференциальном механизме 32 бесступенчатой трансмиссии 18 двигатель 14 (см. «ENG» на ФИГ. 3) соединен с первым вращающимся элементом RE1, первая вращающаяся машина MG1 (см. «MG1» на ФИГ. 3) соединена со вторым вращающимся элементом RE2, и вторая вращающаяся машина MG2 (см. «MG2» на ФИГ. 3) соединенная с третьим вращающимся элементом RE3, который вращается неразрывно с промежуточным элементом 30 трансмиссии так, что вращение двигателя 14 передается ступенчатой трансмиссии 20 через промежуточный элемент 30 трансмиссии. В бесступенчатой трансмиссии 18 соотношение между частотой вращения солнечной шестерни S0 и частотой вращения ведомой шестерни R0 обозначена прямой линией L0, пересекающей вертикальную линию Y2.
[0031] В ступенчатой трансмиссии 20 второй вращающийся элемент RE4 выборочно соединен с промежуточным элементом 30 трансмиссии муфтой С1, пятый вращающийся элемент RE5 соединен с выводным валом 22, шестой вращающийся элемент RE6 выборочно соединен с промежуточным элементом 30 трансмиссии муфтой С2 и выборочно соединен с картером 16 с помощью тормоза В2, и седьмой вращающийся элемент RE7 выборочно соединен с картером 16 с помощью тормоза В1. В ступенчатой трансмиссии 20 соответствующие частоты вращения выводного вала 22 в «1-м», «2-м», «3-м» и «4-м» положении обозначены соответствующими линиями L1, L2, L3 и L4, пересекающими вертикальную линию Y5 посредством управления зацеплением/расцеплением устройств СВ зацепления.
[0032] Прямая линия L0 и прямые линии L1, L2, L3 и L4, обозначенные жирными линиями на ФИГ. 3, показывают соответствующую скорость частоты вращения соответствующих вращающихся элементов при движении вперед в режиме гибридного движения, обеспечивающем движение двигателя, в котором автомобиль перемещается с использованием по меньшей мере двигателя 14 в качестве источника мощности. В режиме гибридного движения в дифференциальном механизме 32, когда противодействующая сила крутящего момента как отрицательный крутящий момент, производимый первой вращающейся машиной MG1, вводится в положительное вращение для солнечной шестерни S0, в то время как крутящий момент двигателя Те вводится для водила СА0, прямой крутящий момент двигателя Td (=Те/(1+ρ)=-(1/ρ)×Tg) появляется на ведомой шестерне R0 как положительный крутящий момент при положительном вращении. Затем, согласно требуемой движущей силе итоговый крутящий момент прямого крутящего момента двигателя Td и крутящего момента MG2 Тm передается как крутящий момент привода в направлении вперед автомобиля 10 ведущим колесам 28 ступенчатой трансмиссией 20, в которой устанавливается одно из положений передачи AT с первой по четвертую. В этом случае первая вращающаяся машина MG1 функционирует как электрогенератор, производящий отрицательный крутящий момент, когда находится в положительном вращении. Электрическая мощность Wg, генерируемая первой вращающейся машиной MG1 подается в батарею 52 или потребляется второй вращающейся машиной MG2. Вторая вращающаяся машина MG2 выводит крутящий момент MG2 Тm, используя всю или часть сгенерированной электрической мощности Wg или используя электрическую мощность от аккумулятора 52 в дополнение к сгенерированной электрической мощности Wg.
[0033] Хотя это и не показано на ФИГ. 3, на номограмме для режима движения автомобиля, обеспечивающего движение автомобиля с использованием второй вращающейся машины MG2 в качестве источника мощности с остановленным двигателем 14, водило СА0 не вращается, и крутящий момент MG2 Тm вводится для ведомой шестерни R0 как положительный крутящий момент при положительном вращении в дифференциальном механизме 32. В этом случае первая вращающаяся машина MG1, соединенная с солнечной шестерни S0, размещена в состоянии без нагрузки и переведена на холостой ход при отрицательном вращении. Т.е. в режиме движения автомобиля двигатель 14 не приводится в движение, чтобы частота вращения двигателя сое как частота вращения двигателя 14 была установлена нулевой, и крутящий момент MG2 Тm (здесь крутящий момент движения мощности при положительном вращении) передается как крутящий момент привода в направлении вперед автомобиля 10 ведущим колесам 28 ступенчатой трансмиссией 20, в которой устанавливается одно из положений передачи АТ с первой по четвертую. При обратном движении автомобиля 10, например, в режиме движения мотора, крутящий момент MG2 Тm вводится для ведомой шестерни R0 как отрицательный крутящий момент при отрицательном вращении и передается как крутящий момент привода в обратном направлении автомобиля 10 ведущим колесам 28 ступенчатой трансмиссией 20, в которой устанавливается переднее положение первой передачи АТ.
[0034] В приводной системе 12 автомобиля бесступенчатая трансмиссия 18 выполнена содержащей дифференциальный механизм 32, имеющий три вращающихся элемента, т.е. водило СА0 как первый вращающийся элемент RE1, с которым соединен двигатель 14 с возможностью передачи мощности, солнечной шестерни S0 как второй вращающийся элемент RE2, с которым соединена первая вращающаяся машина MG1 с возможностью передачи мощности, и ведомая шестерня R0 как третий вращающийся элемент RE3, с которым соединен промежуточный элемент 30 трансмиссии (с другой точки зрения, с которым соединена вторая вращающаяся машина MG2 с возможностью передачи мощности), и которая функционирует как электрический механизм изменения скорости (электрический дифференциальный механизм), в котором дифференциальное состояние дифференциального механизма 32 регулируется посредством управления рабочим состоянием первой вращающейся машины MG1. Т.е. бесступенчатая трансмиссия 18 выполнена содержащей дифференциальный механизм 32, с которым соединен двигатель 14 с возможностью передачи мощности, и первую вращающуюся машину MG1, соединенную с дифференциальным механизмом 32 с возможностью передачи мощности так, что дифференциальное состояние дифференциального механизма 32 регулируется посредством управления рабочим состоянием первой вращающейся машины MG1. Управление бесступенчатой трансмиссией 18 осуществляется как электрической бесступенчатой трансмиссией, которая изменяет передаточное число γ0 (= ωе/ωm) частоты вращения соединительного вала 34 (т.е. частоту вращения двигателя ωе) на частоту вращения MG2 ωm, как частоту вращения промежуточного элемента 30 трансмиссии.
[0035] Например, в гибридном режиме движения, когда частота вращения солнечной шестерни S0 увеличивается или уменьшается посредством управления частотой вращения первой вращающейся машины MG1 относительно частоты вращения ведомой шестерни R0, которая ограничена вращением ведущих колес 28 в связи с установлением положения передачи АТ в ступенчатой трансмиссии 20, частота вращения водила СА0 (т.е. частота вращения двигателя ωе) увеличивается или уменьшается. Соответственно, при движении двигателя управление двигателем 14 может осуществляться в высокоэффективном режиме эксплуатации. Т.е. при использовании ступенчатой трансмиссии 20, где установлено положение передачи AT, и бесступенчатой трансмиссии 18, работающей как бесступенчатая трансмиссия, вся трансмиссия 40, в которой бесступенчатая трансмиссия 18 (синоним с дифференциальным механизмом 32) и ступенчатая трансмиссия 20 расположены последовательно, может быть выполнена как бесступенчатая трансмиссия.
[0036] Так как бесступенчатая трансмиссия 18 может быть переключена как ступенчатая трансмиссия, вся трансмиссия 40 может быть переключена как ступенчатая трансмиссия, используя ступенчатую трансмиссию 20, в которой установлено положение передачи АТ, и бесступенчатую трансмиссию 18, которая переключается как ступенчатая трансмиссия. Т.е. в трансмиссии 40 управление ступенчатой трансмиссией 20 и бесступенчатой трансмиссией 18 может осуществляться таким образом, что выборочно будет установлено множество положений передач (далее - «положения виртуальных передач»), имеющих различное передаточное число γt (=ωе/ωo) частоты вращения двигателя сое относительно выходной частоты вращения ωо. Передаточное число γt является общим передаточным числом, которое образуется бесступенчатой трансмиссией 18 и ступенчатой трансмиссией 20, расположенными последовательно, и принимает значение (γt=γ0×γat), получаемое умножением передаточного числа γ0 бесступенчатой трансмиссии 18 и передаточного числа γat ступенчатой трансмиссии 20.
[0037] Положения виртуальных передач распределяются таким образом, что, например, используя комбинации любого из положений передач АТ ступенчатой трансмиссии 20 и одного или множества передаточных чисел γ0 бесступенчатой трансмиссии 18, устанавливают одно или множество положений виртуальных передач для каждого положения передач АТ ступенчатой трансмиссии 20. Например, ФИГ. 4 является одним примером таблицы распределения положения передач (таблица назначения положения передач), которая определяется предварительно, таким образом, что положения виртуальных передач с первой по третью передачи устанавливается с учетом положения первой передачи АТ, положения виртуальных передач с четвертой по шестую были установлены с учетом положения второй передачи АТ, положения виртуальных передач с седьмой по девятую были установлены с учетом положения третьей передачи АТ, и положение десятой виртуальной передачи устанавливается с учетом положения четвертой передачи АТ.
[0038] ФИГ. 5 представляет собой график, в котором положения передач АТ ступенчатой трансмиссии 20 и положения виртуальных передач трансмиссии 40 показаны на той же номограмме, что и на ФИГ. 3. На ФИГ. 5 жирные линии иллюстрируют случай, когда положение виртуальных передач с четвертой по шестую устанавливается, когда ступенчатая трансмиссия 20 устанавливается в положение второй передачи АТ. В трансмиссии 40 управление бесступенчатой трансмиссией 18 осуществляется таким образом, чтобы обеспечить частоту вращения двигателя сое, которая реализует заранее установленное передаточное число γt с учетом выходной частоты вращения ωо так, чтобы другое положение виртуальной передачи было установлено в определенном положении передачи АТ. Пунктирная линия иллюстрирует случай, когда положение седьмой виртуальной передачи устанавливается, когда ступенчатая трансмиссия 20 устанавливается в положение третьей передачи АТ. В трансмиссии 40 положение виртуальной передачи изменяется посредством управления бесступенчатой трансмиссией 18 согласно изменению положения передачи АТ.
[0039] Возвращаясь назад к ФИГ. 1, автомобиль 10 дополнительно содержит электронный блок 80 управления в качестве контроллера, содержащего управляющую систему автомобиля 10, относящуюся к управлению двигателем 14, бесступенчатую трансмиссию 18, ступенчатую трансмиссию 20 и т.д. Соответственно, ФИГ. 1 представляет собой схему, показывающую систему ввода/вывода электронного блока 80 управления, а также функциональную блок-схему для раскрытия основной части функций управления, выполняемых электронным блоком управления 80. Электронный блок 80 управления содержит так называемый микрокомпьютер, имеющий, например, ЦПУ, ОЗУ, ПЗУ и интерфейс ввода/вывода, и ЦПУ выполняет различные виды управления автомобилем 10 посредством внедрения обработки сигнала в соответствии с программами, заранее сохраненными в ПЗУ, используя при этом функцию временного хранения ОЗУ. Электронный блок 80 управления выполнен с возможностью разделения на субблоки для управления двигателем, управления переключением передач и т.д. по необходимости.
[0040] На электронный блок 80 управления подаются различные сигналы, основанные на значениях обнаружения, определенных различными датчиками, содержащимися в автомобиле 10. Датчики содержат, например, датчик 60 частоты вращения двигателя, датчик 62 частоты вращения MG1, датчик 64 частоты вращения MG2, датчик 66 выходной частоты вращения, датчик 68 положения педали акселератора, датчик 70 степени открытия дроссельной заслонки, датчик 72 положения в пространстве, датчик 74 положения переключения передачи и датчик 76 батареи. Сигналы содержат, например, частоту вращения двигателя ωe, частоту вращения MG1 ωg как частоту вращения первой вращающейся машины MG1, частоту вращения MG2 ωm как входную частоту вращения AT ωi, выходную частоту вращения ωо, соответствующую скорости автомобиля V, положение педали акселератора θасс как размер операции ускорения (т.е. размер операции педали акселератора) водителем, отображающей величину операции ускорения водителем, степень открытия дроссельной заслонки θth как степень открытия электронной дроссельной заслонки, продольное ускорение G автомобиля 10, рабочее положение POSsh рычага 56 переключения передач как рабочего элемента переключения передач, содержащегося в автомобиле 10, температуру THbat батареи, ток Ibat заряда/разрядки батареи и напряжение Vbat батареи 52. Электронный блок 80 управления выводит различные сигналы команд на соответствующие устройства, содержащиеся в автомобиле 10. Устройства содержат, например, устройства 58 управления двигателем, такие как привод дросселя, устройства впрыска топлива и запальные устройства, инвертор 50 и гидравлический контур 54 управления. Сигналы команд содержат, например, сигнал Se команды управления двигателем для управления двигателем 14, сигнал Smg команды управления вращающейся машиной для управления первой вращающейся машиной MG1 и второй вращающейся машиной MG2, сигнал Sat команды гидравлического управления для управления каждым рабочим состоянием устройств СВ зацепления (т.е. для управления переключением передач ступенчатой трансмиссии 20). Сигнал Sat команды гидравлического управления является, например, сигналом команды (током возбуждения) для приведения в движение каждого электромагнитного клапана с SL1 по SL4, регулирующего гидравлические давления PRcb зацепления, подаваемые на соответствующие гидравлические приводы устройств СВ зацепления, и выводится на гидравлический контур 54 управления. Электронный блок 80 управления задает значение команды гидравлической системы (также называемой «командное давление»), соответствующее значению гидравлического давления PRcb зацепления, подаваемого на каждый гидравлический привод для получения заданного крутящего момента Tcb зацепления соответствующего устройства СВ зацепления, и выводит ток возбуждения, соответствующий значению команды гидравлической системы. Электронный блок 80 управления рассчитывает состояние заряда (зарядную емкость) СЗ (SOC) батареи 52 на основе, например, тока Ibat заряда/разрядки батареи и напряжения Vbat батареи.
[0041] Для выполнения различных видов управления в автомобиле 10 электронный блок 80 управления содержит средства управления переключением передач АТ как средства управления переключением передач, т.е. блок 82 управления переключением передач АТ как блок управления переключением передач, и гибридные средства управления, т.е. гибридный блок 84 управления.
[0042] Блок 82 управления переключением передач АТ определяет переключение передач ступенчатой трансмиссии 20 согласно заранее установленному соотношению (например, схеме переключения положения передач АТ), которую предварительно получают экспериментально или теоретически и сохраняют. Если необходимо, блок 82 управления переключением передач АТ выполняет управление переключением передач ступенчатой трансмиссии 20 посредством вывода на гидравлический контур 54 управления сигнала Sat команды гидравлического управления для изменения состояния зацепления/расцепления устройств СВ зацепления электромагнитными клапанами с SL1 по SL4, чтобы автоматически изменять положение передачи АТ ступенчатой трансмиссии 20. Схема переключения положения передач АТ определяет заранее установленное соотношение, имея линии переключения передач (линии повышения передачи и линии понижения передачи), предназначенные для определения того, должна ли ступенчатая трансмиссия 20 быть переключена, в двухмерной системе координат, имеющей в качестве параметров выходную частоту вращения ωо (здесь - синоним скорости автомобиля V и т.п.) и положение педали акселератора θасс (здесь - синоним требуемого крутящего момента Tdem привода, степень открытия дроссельной заслонки θth и т.п.).
[0043] Гибридный блок 84 управления имеет функцию как средства управления двигателем, т.е. блок управления двигателем, для операций управления двигателем 14 и функцию как средства управления вращающейся машиной, т.е. блок управления вращающейся машиной, для операции управления первой вращающейся машиной MG1 и второй вращающейся машиной MG2 посредством инвертора 50. Используя данные функции управления, гибридный блок 84 управления осуществляет управление гибридным приводом и т.д. посредством двигателя 14, первой вращающейся машины MG1 и второй вращающейся машины MG2. Гибридный блок 84 управления рассчитывает требуемую мощность Pdem привода (с другой точки зрения, требуемый крутящий момент Tdem при скорости автомобиля в данный момент времени) посредством применения положения педали акселератора θасс и скорости автомобиля V к заранее установленного соотношения (например, схеме движущей силы). Гибридный блок 84 управления выводит сигналы команды (сигнал Se команды управления двигателем и сигнал Smg команды управления вращающейся машиной) управления двигателем 14, первой вращающейся машиной MG1 и второй вращающейся машиной MG2 так, чтобы обеспечить требуемую мощность Pdem привода. Сигнал Se команды управления двигателем является, например, значением команды мощности Ре двигателя как мощности двигателя 14, которая выводит крутящий момент Те двигателя при частоте вращения двигателя ωe в данный момент времени. Сигнал Smg команды управления вращающейся машиной является, например, значением команды генерирования электрической мощности Wg первой вращающейся машины MG1, выводящей крутящий момент реакции-силы (крутящий момент MG1 Tg при частоте вращения MG1 ωg в данный момент времени) в зависимости от крутящего момента Те двигателя, или значение команды потребляемой электрической мощности Wm второй вращающейся машины MG2, которая выводит крутящий момент MG2 Тm при частоте вращения MG2 ωm в данный момент времени.
[0044] Например, при управлении бесступенчатой трансмиссией 18 как бесступенчатой трансмиссией для осуществления управления всей трансмиссией 40 как бесступенчатой трансмиссией гибридный блок 84 управления управляет двигателем 14 и генерированием электрической мощности Wg первой вращающейся машины MG1 с учетом точки оптимального КПД топлива и т.д., чтобы обеспечить частоту вращения двигателя ωe и крутящий момент Те двигателя, которые могут получать мощность Ре двигателя, которая реализует требуемую мощность Pdem привода, осуществляя таким образом непрерывное управление переключением передач бесступенчатой трансмиссии 18 для изменения передаточного числа γ0 бесступенчатой трансмиссии 18. В результате такого управления осуществляется управление передаточным числом γt трансмиссии 40 как бесступенчатой трансмиссии.
[0045] Например, при переключении передач бесступенчатой трансмиссии 18 как ступенчатой трансмиссии, чтобы переключить передачу всей трансмиссии 40 как ступенчатой трансмиссии, гибридный блок 84 управления определяет переключение передач трансмиссии 40 согласно заранее установленному соотношению (например, схеме переключения положения виртуальной передачи), и совместно с управлением переключением положения передач АТ ступенчатой трансмиссии 20 блоком 82 управления переключением передач АТ гибридный блок 84 управления осуществляет управление переключением передач бесступенчатой трансмиссии 18, чтобы выборочно установить множество положений виртуальных передач. Множество положений виртуальных передач может быть установлено посредством управления частотой вращения двигателя ωе первой вращающейся машиной MG1 в соответствии с выходной частотой вращения ωо таким образом, что могут поддерживаться соответствующие передаточные числа γt. Передаточное число γt каждого положения виртуальной передачи необязательно является постоянной величиной на всем диапазоне выходной частоты вращения ωо и может изменяться в заранее установленном диапазоне или может быть ограничено верхним или нижним пределом частоты вращения соответствующих частей или т.д.
[0046] Схема переключения положения виртуальных передач определяется предварительно с использованием выходной частоты вращения ωо и положения педали акселератора θасс в качестве параметров как схема переключения положения передач АТ. ФИГ. 6 является одним примером схемы переключения положения виртуальных передач, где жирные линии являются линиями повышения передачи, а пунктирные линии являются линиями понижения передачи. Посредством изменения положения виртуальной передачи согласно схеме переключения положения виртуальных передач достигается переключение, аналогичное переключению ступенчатой трансмиссии, для всей трансмиссии 40, где бесступенчатая трансмиссия 18 и ступенчатая трансмиссия 20 расположены последовательно. Управление ступенчатым переключением виртуальных передач, при котором переключается вся трансмиссия 40 как ступенчатая трансмиссия, может быть выполнено только вместо бесступенчатого переключения передач, которое управляет всей трансмиссией 40 как бесступенчатой трансмиссией, например, когда режим движения, придающий значение характеристикам движения, например, спортивный режим движения, выбран водителем, или когда требуемый крутящий момент Tdem относительно большой. В качестве альтернативы управление ступенчатым переключением виртуальных передач может в основном быть выполнено, за исключением заранее определенного времени, в течение которого управление ступенчатым переключением виртуальных передач запрещено.
[0047] Управление ступенчатым переключением виртуальных передач гибридным блоком 84 управления и управление переключением передач ступенчатой трансмиссии 20 блоком 82 управления переключением передач АТ выполняется совместно. В данном варианте осуществления изобретения, десять положений виртуальных передач, т.е. положение виртуальных передач с первой по десятую, назначены четырем положениям передач АТ, т.е. положениям передач АТ с первой по четвертую. Соответственно, при выполнении переключения между положением третьей виртуальной передачи и положением четвертой виртуальной передачи (заданного как «переключение виртуальных передач 3⇔4») выполняется переключение между положением первой передачи АТ и положением второй передачи АТ (заданное как «переключение передач АТ 1⇔2»), при выполнении переключения между виртуальными передачами 6⇔7 выполняется переключение передач АТ 2⇔3, и при выполнении переключения виртуальных передач 9⇔10 выполняется переключение передач АТ 3⇔4 (см. ФИГ. 4). Поэтому, схема переключения положения передач АТ определена таким образом, что переключение положения передач АТ выполняется в то же время, что и переключение положения виртуальных передач. В частности, линии повышения передач «3→4», «6→7» и «9→10» положения виртуальных передач на ФИГ. 6 совпадают с линиями повышения передач «1→2», «2→3» и «3→4» положения передач АТ на схеме переключения (см. «АТ 1→2» и т.д., раскрытые на ФИГ. 6). Аналогично, линии понижения передач «3←4», «6←7» и «9←10» положения виртуальных передач на ФИГ. 6 совпадают с линиями понижения передач «1←2», «2←3» и «3←4» положения передач АТ на схеме переключения (см. «АТ 1←2» и т.д., раскрытые на ФИГ. 6). В качестве альтернативы, возможна такая конфигурация, что на основе определения переключения положения виртуальных передач с использованием схемы переключения положения виртуальных передач на ФИГ. 6 команда переключения положения передач АТ выводится на блок 82 управления переключением переда АТ. Таким образом, при повышении передачи ступенчатой трансмиссии 20 повышается передача всей трансмиссии 40, и при понижении передачи ступенчатой трансмиссии 20 понижается передача всей трансмиссии 40. Блок 82 управления переключением передач АТ изменяет положение передач АТ ступенчатой трансмиссии 20 при изменении положения виртуальных передачи. Так как переключение передачи АТ происходит в то же время, что и переключение положения виртуальной передачи, ступенчатая трансмиссия 20 переключается с изменением частоты вращения двигателя сое так, что при толчке, связанном с переключением передачи ступенчатой трансмиссии 20, менее вероятно, что водитель почувствует несоответствие.
[0048] Гибридный блок 84 управления выборочно устанавливает в качестве режима движения режим движения мотора или гибридный режим движения согласно состоянию движения. Например, когда требуемая мощность Pdem привода находится в диапазоне движения мотора, в котором она меньше чем заранее установленное пороговое значение, гибридный блок 84 управления устанавливает режим движения мотора, в то время как, когда требуемая мощность Pdem привода находится в диапазоне движения двигателя, в котором она равна или больше заранее установленного порогового значения, гибридный блок 84 управления устанавливает гибридный режим движения. С другой стороны, когда требуемая мощность Pdem привода находится в диапазоне движения мотора, если зарядная емкость СЗ батареи 52 меньше заранее установленного порогового значения, гибридный блок 84 управления устанавливает гибридный режим движения.
[0049] Здесь будет подробно раскрыто управление переключением виртуальной ступенчатой передачи трансмиссии 40, когда происходит переключение ступенчатой трансмиссии 20. При переключении ступенчатой трансмиссии 20 (в частности, на фазе инерции во время переключения передачи) блоком 82 управления переключением передач АТ, гибридный блок 84 управления управляет крутящим моментом MG1 Tg и крутящим моментом MG2 Тm на основе крутящего момента Те двигателя и крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения, на стороне, продвигающей переключение, устройства зацепления на стороне расцепления и устройства зацепления на стороне зацепления в ступенчатой трансмиссии 20 так, что угловое ускорение MG2 dωm/dt как скорость изменения частоты вращения MG2 ωm и угловое ускорение dωe/dt двигателя как скорость изменения частоты вращения двигателя сое достигают соответствующих заданных значений.
[0050] При управлении переключением передач ступенчатой трансмиссии 20 существуют различные схемы переключения передач (режимы переключения передач), например, повышение передачи с включенным двигателем, повышение передачи с выключенным двигателем, понижение передачи с выключенным двигателем и понижение передачи с выключенным двигателем. Переключение передачи при включенном двигателе - это переключение передачи, которое определяется, например, увеличением положения педали акселератора θасс или увеличением скорости V автомобиля в состоянии, когда поддерживается включенное состояние акселератора, в то время как переключение передачи при выключенном двигателе определяется, например, уменьшением положения педали акселератора θаcc или уменьшением скорости V автомобиля в состоянии, когда поддерживается выключенное состояние акселератора. Если допустить, что это происходит в состоянии, когда крутящий момент Tcb трансмиссии не производится ни устройством зацепления на стороне расцепления, ни устройством зацепления на стороне зацепления при переключении передач, входная частота вращения AT ωi увеличивается спонтанно при включении двигателя, в то время как входная частота вращения AT ωi спонтанно снижается при выключении двигателя. Поэтому, при повышении передачи с включенным двигателем или понижении передачи с выключенным двигателем, при которых входная частота вращения AT ωi не может быть спонтанно изменена в сторону синхронной частоты вращения ωisyca после переключения передачи (= ωо × частота вращения γata после переключения передачи), предпочтительно продолжать переключение посредством производства крутящего момента Tcb в устройстве зацепления на стороне зацепления, которое устанавливает положение передачи АТ после переключения передачи. С другой стороны, при повышении передачи с выключенным двигателем или понижении передачи с включенным двигателем, при которых входная частота вращения AT ωi может быть спонтанно изменена в сторону синхронной частоты вращения ωisyca после переключения передачи, предпочтительно продолжать переключение посредством снижения крутящего момента Tcb в устройстве зацепления на стороне расцепления, которое устанавливает положение передачи АТ до переключения передачи. Поэтому, устройство зацепления на стороне хода переключения передачи при повышении передачи с включенным двигателем или понижении передачи с выключенным двигателем - это устройство зацепления на стороне зацепления, в то время как устройство зацепления на стороне хода переключения передачи при повышении передачи с выключенным двигателем или понижении передачи с включенным двигателем - это устройство зацепления на стороне расцепления.
[0051] В частности, гибридный блок 84 управления рассчитывает крутящий момент MG1 Tg и крутящий момент MG2 Тm на основе заданных значений углового ускорения MG2 dωm/dt и углового ускорения dωe/dt двигателя, крутящего момента Те двигателя и крутящего момента Tat трансмиссии АТ с использованием предварительно определенной формулы (1), представленной ниже. Гибридный блок 84 управления выводит сигналы Smg команд управления вращающейся машины для получения рассчитанного крутящего момента MG1 Tg и крутящего момента MG2 Тm, соответственно, на инвертор 50. Формула (1) - это формула, полученная, например, на основе равенства движения, задаваемого инерцией, углового ускорения и крутящего момента на валу, установленного для оси-g, оси-е и оси-m (см. ФИГ. 3) в бесступенчатой трансмиссии 18, и выражений отношения, определенных бесступенчатой трансмиссией 18, имеющей две степени свободы (т.е. две степени свободы таких, что когда определены частоты вращения двух из трех осей, определяется частота вращения оставшейся оси). Таким образом, соответствующие величины a11, …, b11, …, с22 в матрицах 2×2 в формуле (1) соответственно принимают значения, составленные из комбинаций инерций вращающихся элементов, составляющих бесступенчатую трансмиссию 18, передаточного числа ρ0 дифференциального механизма 32 и т.д.

[0052] Заданные значения углового ускорения MG2 dωm/dt и углового ускорения dωe/dt двигателя в формуле (1) определены предварительно, например, в соответствии с какой схемой производится переключение передач ступенчатой трансмиссии 20, между какими положениями передач АТ производится переключение, и между какими положениями виртуальных передач производится переключение. Крутящий момент Те двигателя в формуле (1) является, например, крутящим моментом Те двигателя при частоте вращения двигателя ωе, когда достигнута мощность Ре двигателя, обеспечивающая требуемую мощность Pdem привода.
[0053] Крутящий момент Tat трансмиссии АТ в формуле (1) является общим значением преобразованных величин, полученных посредством преобразования крутящих моментов трансмиссии промежуточного элемента 30 трансмиссии (т.е. ось m), которые соответственно должны быть общими для устройств СВ зацепления при переключении передач ступенчатой трансмиссии 20 (т.е. общее значение - это значение, полученное посредством преобразования крутящего момента трансмиссии промежуточного элемента 30 трансмиссии, который передает ступенчатая трансмиссия 20). Формула (1) - это формула модели при выполнении переключения передачи ступенчатой трансмиссии 20, и поэтому в данном варианте осуществления изобретения для удобства крутящий момент Tat трансмиссии АТ в формуле (1) задан крутящим моментом Tcb устройства зацепления на стороне хода переключения, служащего как основное устройство зацепления для выполнения зацепления. В формуле (1) упреждающее значение задано как значение крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения. Поэтому электронный блок 80 управления дополнительно содержит устройства установки крутящего момента трансмиссии, т.е. блок 86 установки крутящего момента трансмиссии, который устанавливает крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения.
[0054] При установке крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения блоком 86 установки крутящего момента трансмиссии можно рассмотреть установку значения крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения согласно входному крутящему моменту Ti AT на основе мощности Ре двигателя, обеспечивающей требуемую мощность Pdem привода, с использованием соотношения, определенной предварительно для типа переключения, отличающегося согласно схеме переключения ступенчатой трансмиссии 20, в соответствии с которой переключение производится между положениями передач АТ или т.п., чтобы сбалансировать сдвиг от толчка при переключения передач, времени переключения передач и т.д. ступенчатой трансмиссии 20. Однако, если мощность батареи Pbat как мощность батареи 52 мала при переключении передач, существует вероятность того, что в связи с ограничением мощности Pbat батареи сложно вывести крутящий момент MG1 Tg и крутящий момент MG2 Тm в соответствии со значениями, рассчитанным по формуле (1) на основе крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения, где не учитывается мощность Pbat батареи так, что угловое ускорение MG2 dωm/dt и угловое ускорение dωe/dt двигателя не могут быть надлежащим образом отрегулированы до заданных значений. В частности, так как частоту вращения двигателя сое можно регулировать независимо от управления переключением передач ступенчатой трансмиссии 20 в трансмиссии 40 (т.е. так как частота вращения двигателя сое не может регулироваться только управлением переключения передач ступенчатой трансмиссии 20), существует вероятность, что угловое ускорение dωe/dt двигателя не может быть надлежащим образом отрегулировано до заданного значения.
[0055] Учитывая вышеизложенное, блок 86 установки крутящего момента трансмиссии устанавливает крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения, учитывая мощность Pbat батареи. Так как управление батареей 52 осуществляется на основе мощности (электрической мощности), крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения устанавливается с учетом мощности.
[0056] В частности, блок 86 установки крутящего момента трансмиссии устанавливает крутящий момент Tcb устройства зацепления на стороне хода переключения на основе мощности двигателя Ре (мощность Ре двигателя 14), мощности Pina (далее - «мощность Pina хода переключения»), требуемой для хода переключения бесступенчатой трансмиссии 18 (дифференциального механизма 32) и ступенчатой трансмиссии 20, и мощности Pbat батареи (мощность Pbat мощности батареи) так, что крутящий момент MG1 Tg и крутящий момент MG2 Тm ограничивается в связи с ограничением мощности Pbat батареи при переключении передачи ступенчатой трансмиссии 20. Мощность Pina хода переключения - это мощность, требуемая, когда промежуточный элемент 30 трансмиссии, двигатель 14 и т.д. изменяют направление вращения во время переключения передачи, и мощность изменения вращения согласно скорости изменения энергии вращения в бесступенчатой трансмиссии 18 и ступенчатой трансмиссии 20.
[0057] ФИГ. 7 представляет собой концептуальную схему баланса мощностей в системе виртуального управления переключением ступенчатой передачи трансмиссии 40, когда происходит переключение ступенчатой трансмиссии 20. На ФИГ. 7 общая мощность мощности Pv привода автомобиля и мощности Ploss внутренних потерь - это мощность Pcb трансмиссии устройства зацепления на стороне хода переключения. Мощность Pbat батареи - это полезная мощность Pbat батареи 52 и электрическая мощность Win, Wout заряда/разрядки, т.е. электрическая мощность Win заряда (вводимая электрическая мощность), которая определяет ограничение входной электрической мощности батареи 52, и электрическая мощность разрядки Wout (выводимая электрическая мощность), которая определяет ограничение выходной электрической мощности батареи 52. Обычный ход рассуждений при установке крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения приводит к установке баланса входной-выходной мощностей, как показано на ФИГ. 7. Блок 86 установки крутящего момента трансмиссии устанавливает крутящий момент Tcb устройства зацепления на стороне хода переключения, которое может получить мощность Pcb трансмиссии устройства зацепления на стороне хода переключения на основе мощности Ре двигателя, мощности Pina хода переключения и мощности Pbat батареи так, что устанавливается соотношение мощностей при управлении переключением виртуальных передач трансмиссии 40, как показано в формуле (2), представленной ниже (т.е. баланс входной-выходной мощностей достигнут). Мощность Pcb трансмиссии устройства зацепления на стороне хода переключения пропорциональна скорости V автомобиля. Так как, скорость V автомобиля обычно не изменяется во время переключения передач, величина мощности Pcb трансмиссии устройства зацепления на стороне хода переключения и величина крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения обычно пропорциональны друг другу. Таким образом, при использовании установленного соотношения (схемы) между мощностью Pcb трансмиссии устройства зацепления на стороне хода переключения и крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения, которая определяется предварительно с использованием скорости V автомобиля в качестве параметра, может быть задан крутящий момент Tcb трансмиссии на основе скорости V автомобиля и мощности Pcb трансмиссии. Мощность Pbat батареи в формуле (2) принимает положительное значение на стороне разрядки (стороне подачи мощности) батареи 52.

[0058] В то время, как крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения может быть задан с использованием формулы (2), как описано выше, крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения может в качестве альтернативы быть задан на основе самих числовых значений мощности Ре двигателя, мощности Pina хода переключения и мощности Pbat батареи с использованием заранее установленного соотношения (схемы) между мощностью Ре двигателя/мощностью Pina хода переключения/мощности Pbat батареи и мощности Pcb (или крутящего момента Tcb трансмиссии) трансмиссии устройства зацепления на стороне хода переключения. Однако когда крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения устанавливается на основе самих числовых значений соответствующих мощностей, количество состояний, которые может принять каждая мощность, становится больше так, что схема становится высокоразмерной, и поэтому адаптация становится сложной.
[0059] Наоборот, в данном варианте осуществления изобретения, когда крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения устанавливается с использованием заранее установленного соотношения (схемы), предлагается техника, которая делает схему низкоразмерной для упрощения адаптации. В этой технике мощность Ре двигателя, мощность Pina хода переключения передач и мощность Pbat батареи классифицированы на множество уровней, соответствующих их значениям. Множество уровней составляет, например, три уровня, большой, средний и малый, или два уровня, большой и малый, разделенные заранее определенными пороговыми значениями. Соотношение (схема), в которой комбинация уровней соответствующих мощностей и крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения связаны друг с другом, определяется предварительно, и, используя эту взаимосвязь, крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения устанавливается на основе комбинации уровней, полученных посредством классификации соответствующих актуальных мощностей. Т.е. блок 86 установки крутящего момента трансмиссии имеет заранее установленное соотношение (схему, также называемую «низкоразмерная схема»), в которой множество уровней, соответствующих величинам мощности Ре двигателя, мощности Pina хода переключения и мощности Pbat батареи, используется в качестве параметров так, что крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения читается как считанное значение согласно параметрам, и, используя данную низкоразмерную схему, блок 86 установки крутящего момента трансмиссии устанавливает крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения. В качестве параметров могут быть использованы, например, большой, средний и малый уровень или числовые значения (например, 3, 2 и 1), соответственно назначенные большому, среднему и малому уровню.
[0060] В частности, блок 86 установки крутящего момента трансмиссии вычисляет расчетное значение генерируемой мощности двигателя 14 как мощности Ре двигателя, служащей в качестве основы при установке крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения. Например, блок 86 установки крутящего момента трансмиссии вычисляет расчетное значение генерируемой мощности двигателя 14 на основе сигнала Se команды управления двигателем (значение команды мощности Ре двигателя), который выводится гибридным блоком 84 управления. Поэтому расчетное значение генерируемой мощности двигателя 14 является требуемым значением мощности Ре двигателя, обеспечивающим требуемую мощность Pdem привода.
[0061] Блок 86 установки крутящего момента трансмиссии вычисляет расчетное значение мощности Pina хода переключения. Например, как показано в формуле (3), представленной ниже, блок 86 установки крутящего момента трансмиссии вычисляет расчетное значение мощности Pina хода переключения как расходуемую мощность инерции посредством разделения разности энергии вращения ΔЕ (= Eaft-Ebfr), как расходуемой энергии инерции в бесступенчатой трансмиссии 18 и ступенчатой трансмиссии 20 до и после переключения передачи ступенчатой трансмиссии 20 на заданное время Tina переключения передачи ступенчатой трансмиссии 20 как целевое время фазы инерции, определенное заранее для каждого типа переключения передачи (например, «повышение передачи 2→3» или «понижение передачи 3→2») ступенчатой трансмиссии 20. В формуле (3) Eaft - это энергия вращения после переключения передачи, a Ebfr - это энергия вращения до переключения передачи. Как показано в формуле (4), представленной ниже, блок 86 установки крутящего момента рассчитывает энергию Е вращения. Т.е., используя формулу (4), блок 86 установки крутящего момента трансмиссии вычисляет энергию Ebfr вращения до переключения на основе частоты вращения MG2 ωm до переключения передачи, частоты вращения двигателя сое до переключения передачи и частоты вращения MG1 ωg до переключения передачи и рассчитывает энергию Eaft вращения после переключения передачи на основе частоты вращения MG2 ωm после переключения передачи, частоты вращения двигателя сое после переключения передачи и частоты вращения MG1 ωg после переключения передачи. Частота вращения MG2 ωm до или после переключения передачи вычисляется посредством ωо (выходная частота вращения) × γat (передаточное число положения передачи АТ ступенчатой трансмиссии 20 до или после переключения передачи). Частота вращения двигателя ωе до или после переключения передачи вычисляется посредством ωо (выходная частота вращения) × γt (передаточное число положения виртуальной передачи трансмиссии 40 до или после переключения передачи). Частота вращения MG1 ωg до или после переключения передачи рассчитывается по формуле (5), представленной ниже, которая определяется предварительно на основе относительного соотношения между частотами вращения трех вращающихся элементов в дифференциальном механизме 32. В формуле (4) Im - это инерция на промежуточном элементе 30 трансмиссии (т.е. второй вращающейся машине MG2 + ступенчатой трансмиссии 20), которая определяется в соответствии с положением передачи АТ ступенчатой трансмиссии 20 (т.е. зависит от состояний зацепления устройств СВ зацепления в ступенчатой трансмиссии 20). Iе - это инерция двигателя 14. Ig - это инерция первой вращающейся машины MG1. В формуле (5) ρ0 - это передаточное число дифференциального механизма 32.



[0062] Блок 86 установки крутящего момента трансмиссии вычисляет расчетные значения полезной мощности Pbat батареи (т.е. электрической мощности Win, Wout заряда/разрядки) как мощности Pbat батареи, служащей в качестве основы при установке крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения. Например, блок 86 установки крутящего момента трансмиссии вычисляет расчетные значения электрической мощности Win, Wout заряда/разрядки батареи 52 на основе температуры THbat батареи и зарядной емкости СЗ батареи 52. Например, электрическая мощность Win, Wout заряда/разрядки установлена меньшей при уменьшении температуры THbat батареи в диапазоне низких температур, где температура THbat батареи ниже диапазона нормального использования, и установлена меньшей при увеличении температуры батареи THbat в диапазоне высокой температуры, где температура батареи THbat выше диапазона нормального использования. Например, электрическая мощность Win заряда установлена меньшей при увеличении зарядной емкости СЗ в диапазоне с большой зарядной емкостью, в то время как электрическая мощность Wout разрядки установлена меньшей при снижении зарядной емкости СЗ в диапазоне с малой зарядной емкостью СЗ.
[0063] Блок 86 установки крутящего момента классифицирует мощность Ре двигателя, мощность Pina хода переключения передач и мощность Pbat батареи на множество уровней (параметров), соответствующих их значениям. Используя низкоразмерную схему, блок 86 установки крутящего момента трансмиссии устанавливает крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения на основе этих параметров. Предполагается, что в автомобиле 10 баланс входной-выходной мощности достигается только за счет управления батареей 52 как стороной для получения мощности. Например, это может быть случай, когда мощность Ре двигателя большая и мощность Pina хода переключения как сторона для получения мощности маленькая, как в случае, когда положение передачи АТ на стороне высокой скорости (стороне высокой передачи) изменяется при движении с высокой скоростью. Поэтому, как для мощности Pbat батареи предпочтительно использовать расчетное значение электрической мощности Win заряда батареи 52. Однако в случае автомобиля, в котором присутствует состояние, где мощность Ре двигателя маленькая и мощность Pina ход переключения большая, расчетное значение электрической мощности Wout разрядки батареи 52 используется вместо электрической мощности Win заряда по необходимости.
[0064] Здесь для выполнения стабильного переключения передач, не зависящего от мощности Pbat батареи, необходимо достигнуть баланса между мощностью Ре двигателя, мощностью Pina хода переключения и мощностью Pcb трансмиссии устройства зацепления на стороне хода переключения. Однако, например, при понижении передачи с включенным двигателем, выполняемом в диапазоне, где мощность Pbat батареи (электрическая мощность Win заряда) маленькая и мощность Pina хода переключения маленькая, частоту вращения MG2 ωm становится сложно изменить так, что становится сложно продолжать переключение передач в состоянии, где крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения становится больше крутящего момента Те двигателя. В состоянии, где крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения ограничен так, что крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения становится значительно меньше, чем крутящий момент Те двигателя, чтобы обеспечить ход переключения, избыточная мощность Ре двигателя может быть использована для увеличения частоты вращения двигателя ωе так, что существует возможность быстрого увеличения частоты вращения двигателя ωе. Учитывая вышеизложенное, в состоянии, где мощность Pbat батареи (электрическая мощность Win заряда) маленькая и мощность Pina хода переключения маленькая, гибридный блок 84 управления приводит к тому, что мощность Ре двигателя меньше требуемого значения. Например, при понижении передачи с выключенным двигателем, выполняемом в диапазоне, где мощность Pbat батареи (электрическая мощность Wout разрядки) маленькая и мощность Pina хода переключения большая, существует вероятность, что мощность Ре двигателя станет недостаточной. Учитывая вышеизложенное, гибридный блок 84 управления приводит к тому, что мощность Ре двигателя больше требуемого значения. Поэтому, электронный блок 80 управления дополнительно содержит средства определения состояния, т.е. блок 88 определения состояния, определяющий, был ли достигнут баланс соответствующих входной-выходной мощностей, т.е. мощности Ре двигателя, мощности Pina хода переключения, мощности Pbat батареи и мощности Pcb трансмиссии устройства зацепления на стороне хода переключения.
[0065] Блок 88 определения состояния определяет, был ли достигнут баланс соответствующих входной-выходной мощностей, т.е. мощности Ре двигателя, мощности Pina хода переключения, мощности Pbat батареи и мощности Pcb трансмиссии устройства зацепления на стороне хода переключения, например, на основе мощности Pina хода переключения и мощности Pbat батареи (электрическая мощность Win, Wout заряда/разрядки), рассчитываемым блоком 86 установки крутящего момента трансмиссии. Например, когда уровень мощности Ре двигателя, классифицированной блоком 86 крутящего момента трансмиссии, большой, уровень мощности Pina хода переключения, классифицированной блоком 86 крутящего момента трансмиссии, маленький, и уровень мощности Pbat батареи (электрическая мощность Win заряда), классифицированной блоком 86 крутящего момента трансмиссии, маленький, блок 88 определения состояния определяет, что баланс соответствующих входной-выходной мощностей не достигнут (т.е. мощность Ре двигателя становится избыточной).
[0066] Когда блок 88 определения состояния определил, что баланс соответствующих входной-выходной мощностей не достигнут, гибридный блок 84 управления изменяет мощность Ре двигателя на заранее определенную мощность от требуемого значения так, что достигается баланс соответствующих входной-выходной мощностей. В случае, когда мощность Ре двигателя становится избыточной, данная заранее определенная мощность является, например, заранее определенной величиной снижения для переключения уровня мощности Ре двигателя, классифицированной блоком 86 установки крутящего момента трансмиссии, с большого на средний или малый.
[0067] Когда блок 88 определения состояния определил, что баланс соответствующих входной-выходной мощностей не достигнут, блок 86 установки крутящего момента трансмиссии использует мощность Ре двигателя, измененную гибридным блоком 84, как мощность Ре двигателя, служащую в качестве основы при установке крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения.
[0068] При повышении передачи трансмиссии 40, когда происходит повышение передачи ступенчатой трансмиссии 20 с включенным двигателем ступенчатой трансмиссии 20, входная частота вращения AT ωi снижается в сторону синхронной частоты вращения ωisyca после переключения передачи посредством управления устройством зацепления на стороне зацепления в сторону зацепления. Поэтому, усилие сила зацепления устройства зацепления на стороне зацепления прилагается в направлении снижения входной частоты вращения передач AT ωi и таким образом в направлении снижения частоты вращения двигателя ωе. Т.е. направление работы устройства зацепления на стороне зацепления и направление изменения частоты вращения двигателя сое при повышении передачи трансмиссии 40 совпадают друг с другом. Поэтому, даже если баланс соответствующих входной-выходной мощностей утрачен во время переключения передач с использованием заданного крутящего момента Tcb устройства зацепления на стороне хода переключения, отклонение от заданного значения углового ускорения двигателя dωe/dt едва заметно. По этой причине, при повышении передачи ступенчатой трансмиссии 20 с включенным двигателем, даже если количество уровней, классифицирующих каждую мощность Ре двигателя, мощность Pina хода переключения и мощность Pbat батареи, мало, проблемы не могут возникнуть.
[0069] С другой стороны, при понижении передачи трансмиссии 40, когда происходит понижение передачи с включенным двигателем ступенчатой трансмиссии 20, входная частота вращения AT ωi увеличивается в сторону синхронной частоты вращения ωisyca после переключения передачи посредством управления устройством зацепления на стороне расцепления в сторону расцепления. Поэтому, сила зацепления устройства зацепления на стороне расцепления прилагается в направлении снижения входной частоты вращения передач AT ωi и таким образом в направлении снижения частоты вращения двигателя ωе. Т.е. направление работы устройства зацепления на стороне расцепления и направление изменения частоты вращения двигателя ωе при понижении передачи трансмиссии 40 противоположны друг другу. Поэтому, если баланс соответствующих входной-выходной мощностей утрачен во время переключения передач с использованием заданного крутящего момента Tcb устройства зацепления на стороне хода переключения, отклонение от заданного значения углового ускорения двигателя dωe/dt обычно заметно. По этой причине, при понижении передачи с включенным двигателем ступенчатой трансмиссии 20 необходимо увеличить количество уровней, классифицирующих мощность Ре двигателя, мощность Pina хода переключения и мощность Pbat батареи так, чтобы установить более точный крутящий момент Tcb устройства зацепления на стороне хода переключения.
[0070] Учитывая вышеизложенное, количество уровней переключения на понижающую передачу ступенчатой трансмиссии 20 с включенным двигателем установлено большим, чем количество уровней переключения на повышающую передачу ступенчатой трансмиссии 20 с включенным двигателем.
[0071] ФИГ. 8 представляет собой блок-схему для раскрытия основной части операции управления электронного блока 80 управления, т.е. операции управления для надлежащего выполнения переключения всей трансмиссии 40 независимо от отграничения мощности батареи Pbat. Блок-схема повторно выполняется, например, при управлении переключением виртуальной ступенчатой передачи трансмиссии 40, когда происходит переключение ступенчатой трансмиссии 20.
[0072] На ФИГ. 8 сначала на шаге S10, соответствующем функции блока 86 установки крутящего момента трансмиссии, вычисляется расчетное значение генерируемой мощности двигателя 14. Затем на шаге S20, соответствующем функции блока 86 установки крутящего момента трансмиссии, вычисляется расчетное значение мощности Pina хода переключения как расходуемой мощности инерции. Затем на шаге S30, соответствующем функции блока 86 установки крутящего момента трансмиссии, вычисляются расчетные значения полезной мощности Pbat батареи (т.е. электрическая мощность Win, Wout заряда/разрядки). Затем на этапе S40, соответствующем функции блока 88 определения состояния, определяется, был ли достигнут баланс соответствующих входной-выходной мощностей, т.е. мощности Ре двигателя, мощности Pina хода переключения, мощности Pbat батареи и мощности Pcb трансмиссии устройства зацепления на стороне хода переключения. Если определение на этапе S40 отрицательное, то на этапе S50, соответствующем функции гибридного блока 84 управления, мощность Ре двигателя изменяется (увеличивается или уменьшается) от требуемого значения так, что достигается баланс соответствующих входной-выходной мощностей. Если определение на этапе S40 положительное или в последствии на этапе S50, то на этапе S60, соответствующем функции блока 86 установки крутящего момента трансмиссии, крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения, используемого в гидравлическом управлении при переключении ступенчатой трансмиссии 20, устанавливается согласно соответствующим состояниям (с точки зрения мощности) на этапе S10 (или этапе S50), этапе S20 и этапе S30. Т.е. мощность Ре двигателя, мощность Pina хода переключения передач и мощность Pbat батареи классифицированы на множество уровней (параметров), соответствующих их значениям, и при помощи низкоразмерной схемы устанавливается крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения на основе этих параметров.
[0073] Как раскрыто выше, согласно данному варианту осуществления изобретения так как крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения основан на мощности Ре двигателя, мощности Pina хода переключения и мощности Pbat батареи так, что предотвращается ограничение крутящего момента MG1 Tg и крутящего момента MG2 Тm в связи с ограничением мощности Pbat батареи при переключении ступенчатой трансмиссии 20, ступенчатая трансмиссия 20 переключается с крутящим моментом Tcb устройства зацепления на стороне хода переключения с учетом баланса соответствующих входной-выходной мощностей. Следовательно, даже если мощность Pbat батареи ограничена при переключении передачи ступенчатой трансмиссии 20, требуемый крутящий момент MG1 Tg и крутящий момент MG2 Тm, как правило, будет получен так, что управление может быть осуществлено надлежащим образом, чтобы угловое ускорение dωe/dt двигателя достигло заданного значения. Таким образом, переключение всей трансмиссии 40 может быть выполнено надлежащим образом, независимо от ограничения мощности батареи Pbat.
[0074] Согласно данному варианту осуществления изобретения, если баланс соответствующих входной-выходной мощностей не достигнут, мощность Ре двигателя изменяется таким образом, что баланс соответствующих входной-выходной мощностей достигается, и измененная мощность Ре двигателя используется как мощность Ре двигателя, служащая как основа при установке крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения, чтобы выполнялось переключение передач ступенчатой трансмиссии 20 с учетом дальнейшего баланса соответствующих входной-выходной мощностей. Следовательно, переключение всей трансмиссии 40 может быть выполнено точнее.
[0075] Согласно данному варианту осуществления изобретения крутящий момент Tcb устройства зацепления на стороне хода переключения устанавливается с использованием заранее установленного соотношения (схемы), в которой множество уровней, соответствующих величинам мощности Ре двигателя, мощности Pina хода переключения и мощности Pbat батареи, используется как в качестве параметров так, что крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения читается как считанное значение согласно параметрам, и поэтому за счет установления крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения посредством классификации на множество уровней, соответствующих величинам соответствующих мощностей (т.е. посредством уменьшения количества параметров), заранее определенное взаимодействие может быть сделано низкоразмерным для упрощения адаптации.
[0076] Согласно данному варианту осуществления изобретения количество уровней при понижении передачи с включенным двигателем ступенчатой трансмиссии 20, когда выполняется понижение передачи всей трансмиссии 40, установлено большим, чем количество уровней при повышении передачи с включенным двигателем ступенчатой трансмиссии 20, когда выполняется повышение передачи всей трансмиссии 40 так, что может надлежащим образом быть выполнено понижение передачи с включенным двигателем ступенчатой трансмиссии 20, которое представляет трудность с точки зрения управления переключением передач по сравнению с повышением передач с включенным двигателем ступенчатой трансмиссии 20. Таким образом, так как количество параметров может быть изменено в соответствии с типом переключения (например, согласно степени сложности управления переключением), адаптация может быть более простой, так как управление переключением становится проще.
[0077] В то время как вариант осуществления изобретения раскрыт со ссылкой на чертежи, изобретение также применимо к другим конфигурациям.
[0078] Например, в блок-схеме на ФИГ. 8 в раскрытом выше варианте осуществления изобретения крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения установлен с использованием низкоразмерной схемы, но изобретение не ограничено данной конфигурацией. Например, на этапе S60 в блок-схеме на ФИГ. 8 крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения может быть задан с использованием формулы (2), или крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения может быть задан на основе самих числовых значений соответствующих мощностей, т.е. мощности Ре двигателя, мощности Pina хода переключения и мощности Pbat батареи с использованием заранее установленного соотношения (например, высокоразмерной схемы). В другом случае, как показано на этапе S50 в блок-схеме на ФИГ. 8, когда баланс соответствующих входной-выходной мощностей не достигнут, мощность Ре двигателя может быть изменена (увеличена или уменьшена) от требуемого значения.
[0079] В раскрытом выше варианте осуществления изобретения при установке крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения с использованием низкоразмерной схемы мощность Ре двигателя, мощность Pina хода переключения передач и мощность Pbat батареи классифицированы на множество уровней (параметров), соответствующих их значениям, и устанавливается крутящий момент Tcb трансмиссии устройства зацепления на стороне хода переключения на основе этих параметров. Поэтому не требуется точно вычислять соответствующие расчетные значения мощности Ре двигателя, мощности Pina хода переключения и мощности Pbat батареи. Т.е. достаточно, чтобы классификация могла быть достигнута, и поэтому, например, в классификации мощности Pina хода переключения уровни, классифицированные с использованием разности энергии вращения ΔЕ (= Eaft - Ebfr), могут быть использованы как уровни мощности Pina хода переключения, т.е. без использования мощности Pina хода переключения.
[0080] Установка крутящего момента Tcb трансмиссии устройства зацепления на стороне хода переключения с учетом управления переключением передач, используя формулу (1) и баланс соответствующих входной-выходной мощностей в раскрытом выше варианте осуществления изобретения, может быть применена не только к управлению ступенчатым переключением виртуальных передач трансмиссии 40 при переключении передач ступенчатой трансмиссии 20, но также к управлению переключением передач ступенчатой трансмиссии 20, когда управление всей трансмиссией 40 осуществляется как бесступенчатой трансмиссией.
[0081] В раскрытом выше варианте осуществления изобретения ступенчатая трансмиссия 20 является планетарной автоматической трансмиссией, устанавливающей четыре передних положения передач АТ, но изобретение не ограничено данной конфигурацией. Например, ступенчатая трансмиссия 20 может удовлетворительно быть ступенчатой трансмиссией, которая вводит в зацепление заранее определенные устройства зацепления из множества, чтобы установить соответствующее положение передачи из множества. Такая ступенчатая трансмиссия может быть планетарной автоматической трансмиссией как ступенчатая трансмиссия 20 или автоматической трансмиссией как трансмиссия с двойным сцеплением ТДС (DCT), которая является параллельной автоматической трансмиссией с синхронизаторами и двумя осями, имеющей ведущие валы на двух системах так, что устройства зацепления (муфты) соответственно соединены с ведущими валами двух систем и дополнительно соединены с четными ступенями и нечетными ступенями. В случае ТДС заранее определенные устройства зацепления соответствуют устройствам зацепления соответственно соединенным с ведущими валами двух систем.
[0082] В раскрытом выше варианте осуществления изобретения при переключении передачи всей трансмиссии 40 как ступенчатой трансмиссии положение виртуальной передачи изменяется с использованием схемы переключения положений виртуальных передач, но изобретение не ограничено данной конфигурацией. Например, положение виртуальной передачи трансмиссии 40 может быть изменено согласно команде переключения от водителя с использованием рычага 56 переключения передач, переключателя вверх/вниз и т.п.
[0083] В раскрытом выше варианте осуществления изобретения десять положений виртуальных передач АТ назначено четырем положениям передач АТ, но изобретение не ограничено данной конфигурацией. Количество положений виртуальных передач удовлетворительно равно или больше количества положений передач АТ. Количество положений виртуальных передач может быть равно количеству положений передач АТ, но желательно должно быть больше количества положений передач АТ. Например, количество положений виртуальных передач соответственно в два раза или более превышает количество положений передач АТ. Переключение положения передачи АТ выполняется таким образом, что частота вращения промежуточного элемента 30 трансмиссии и второй вращающейся машины MG2, соединенной с промежуточным элементом 30 трансмиссии, поддерживается в заранее установленном диапазоне частоты вращения, в то время как переключение положения виртуальной передачи осуществляется таким образом, что частота вращения двигателя сое поддерживается в заранее установленном диапазоне частоты вращения. Количество положений виртуальных передач и количество положений передач АТ определяется соответствующим образом.
[0084] В раскрытом выше варианте осуществления изобретения дифференциальный механизм 32 выполнен как планетарное устройство с одной шестерней, имеющее три вращающихся элемента, но изобретение не ограничено данной конфигурацией. Например, дифференциальный механизм 32 может быть дифференциальным механизмом с четырьмя или более вращающимися элементами, чтобы множество планетарных устройств было соединено друг с другом. Дифференциальный механизм 32 может быть двойным планетарным устройством. Дифференциальный механизм 32 может быть устройством дифференциальной передачи, имеющим шестерню, которая приводится в движение вращением двигателем 14, и пару конических шестерен в зацеплении с шестерней. Первая вращающаяся машина MG1 и промежуточный элемент 30 соответственно соединены с коническими шестернями.
[0085] Раскрытый выше вариант осуществления изобретения представлен только в качестве примера, и изобретение может быть выполнено с различными изменениями или улучшениями, вносимыми специалистами в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР ДЛЯ АВТОМОБИЛЯ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2673323C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2654250C1 |
| ГИБРИДНОЕ ПРИВОДНОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2007 |
|
RU2410250C2 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2585501C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2606158C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2677425C1 |
| ПРИВОДНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2530207C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2699521C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГЕНЕРИРОВАНИЕМ МОЩНОСТИ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2660326C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРОГАНИЕМ С МЕСТА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОПРИВОДОМ | 2015 |
|
RU2668280C1 |
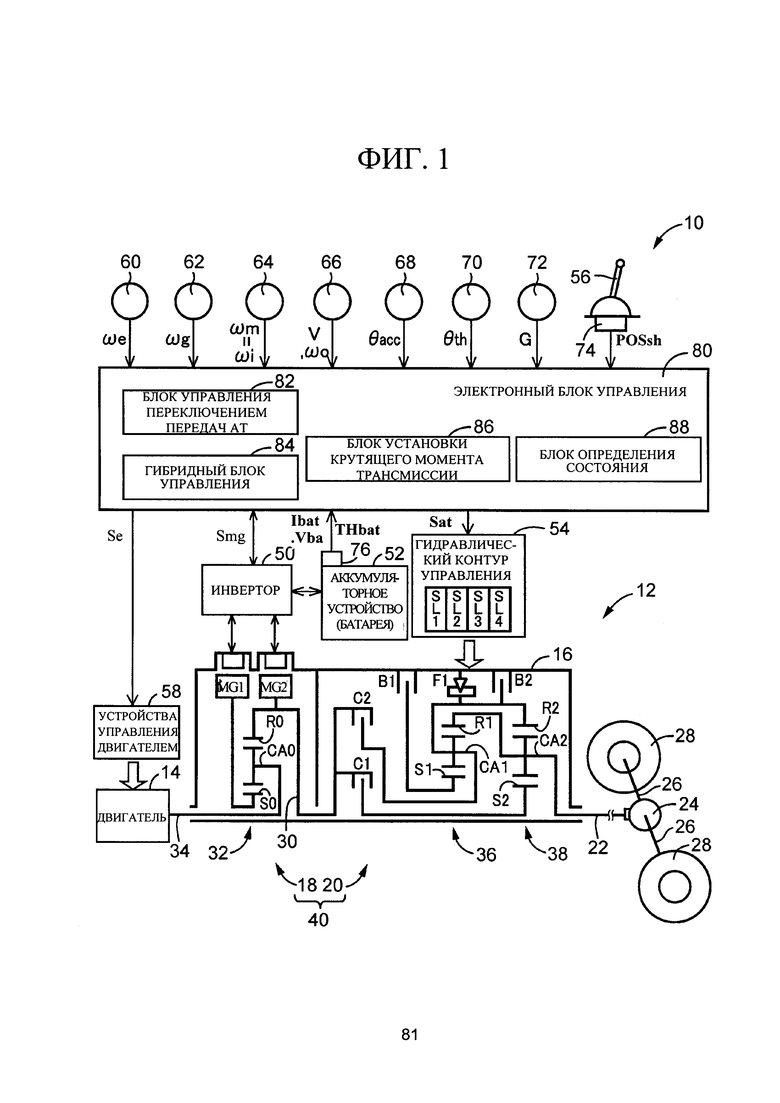
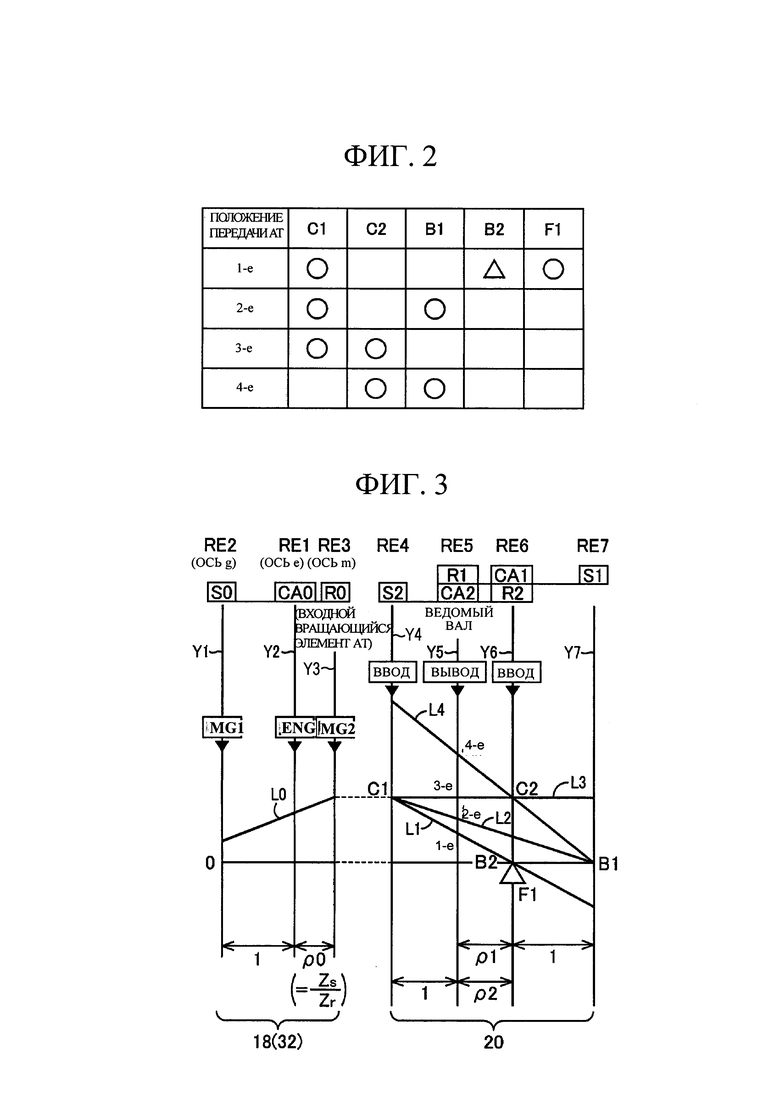
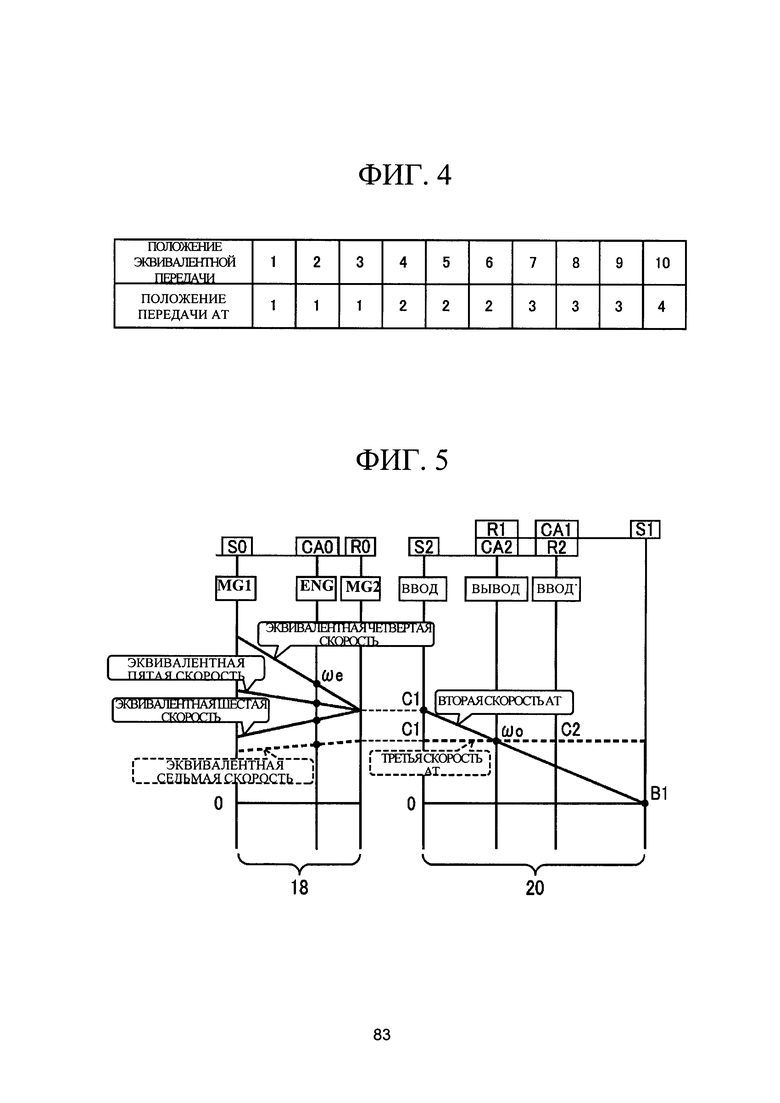
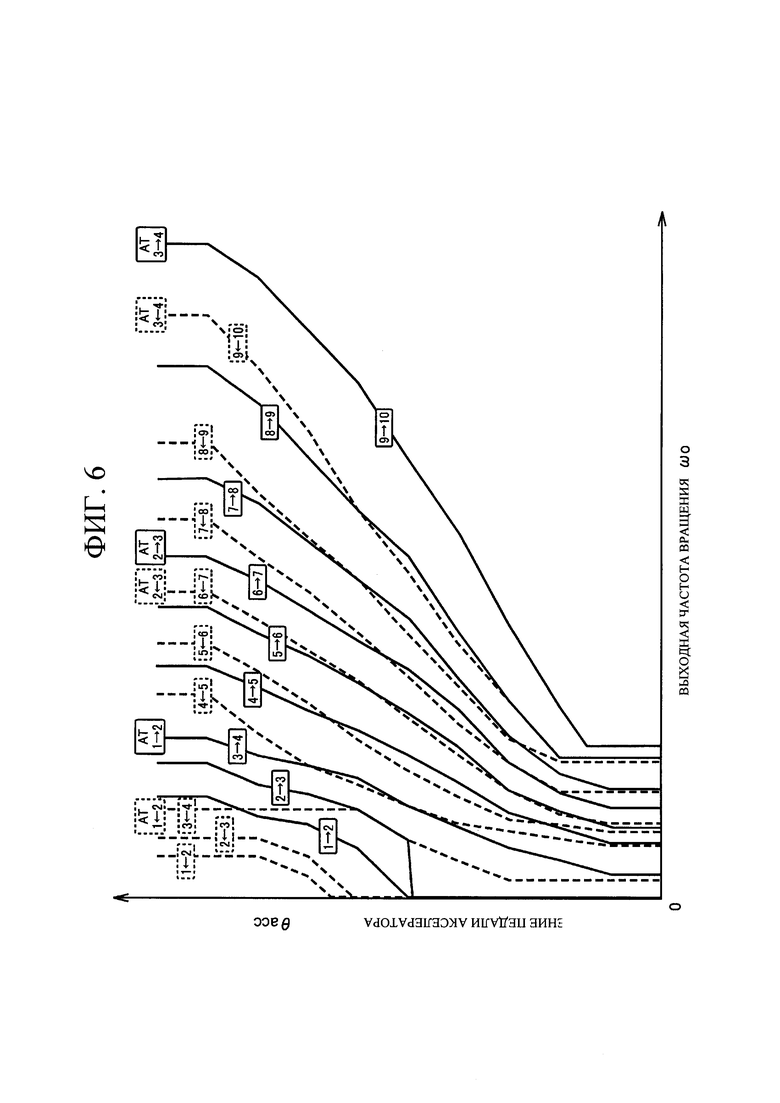
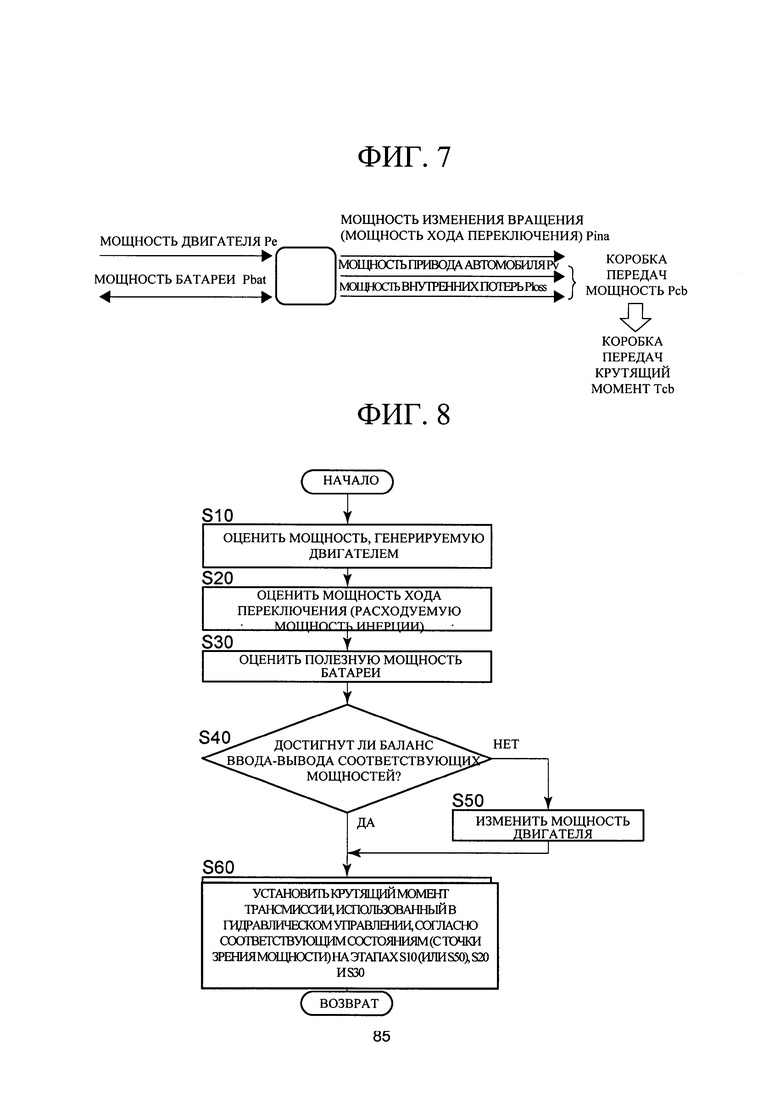
Изобретение относится к гибридным транспортным средствам. Устройство управления приводом гибридного автомобиля содержит электронный блок управления, управляющий расцеплением и зацеплением устройства зацепления. Блок управления управляет выходным крутящим моментом первой и второй вращающейся машины на основе выходного крутящего момента двигателя и крутящего момента трансмиссии устройства зацепления на стороне хода переключения. Блок управления устанавливает крутящий момент трансмиссии устройства зацепления на стороне хода переключения на основе мощности двигателя, мощности, необходимой для переключения дифференциального механизма и ступенчатой трансмиссии, и мощности аккумуляторного устройства так, что предотвращается ограничение выходного крутящего момента первой вращающейся машины и выходного крутящего момента второй вращающейся машины. Улучшается работа трансмиссии. 2 н. и 3 з.п. ф-лы, 8 ил.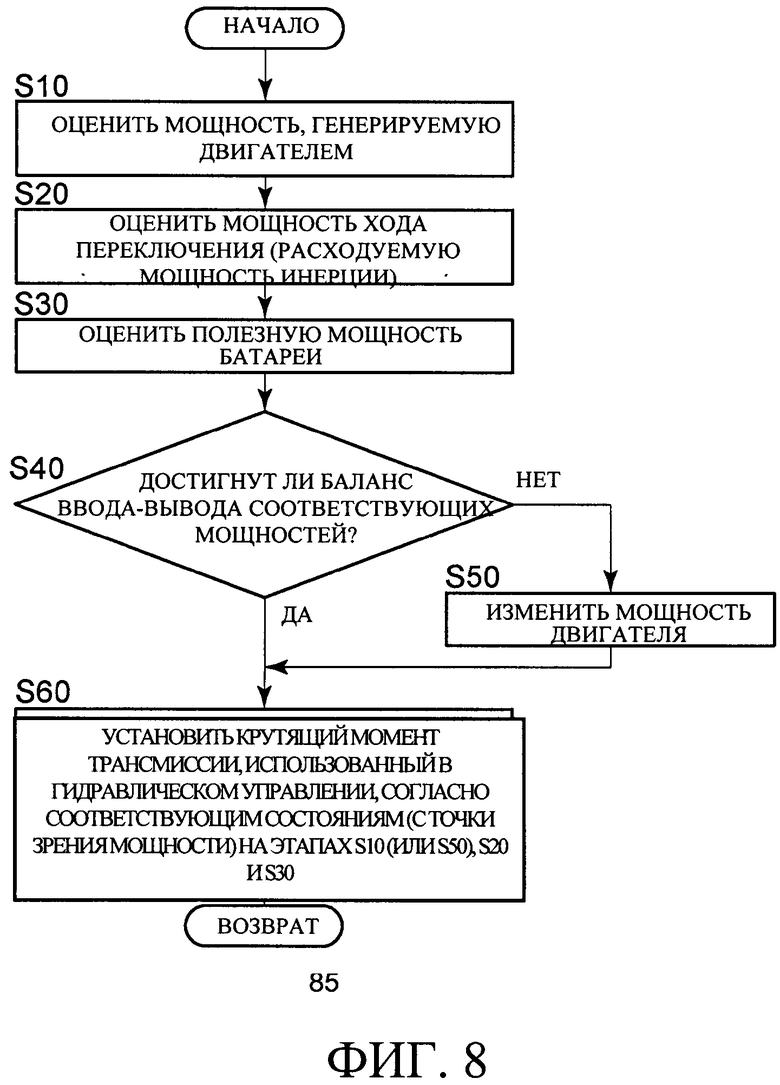
1. Устройство управления приводом гибридного автомобиля, при этом
гибридный автомобиль содержит двигатель, дифференциальный механизм, ведущее колесо, первую вращающуюся машину, вторую вращающуюся машину, ступенчатую трансмиссию и аккумуляторное устройство, дифференциальный механизм содержит первый вращающийся элемент, с которым соединен двигатель с возможностью передачи мощности, второй вращающийся элемент, с которым соединена первая вращающаяся машина с возможностью передачи мощности, и третий вращающийся элемент, с которым соединен промежуточный элемент трансмиссии, вторая вращающаяся машина соединена с промежуточным элементом трансмиссии с возможностью передачи мощности, ступенчатая трансмиссия является частью пути передачи мощности между промежуточным элементом трансмиссии и ведущим колесом, ступенчатая трансмиссия выполнена с возможностью введения в зацепление заранее определенных устройств зацепления из множества устройств зацепления так, чтобы установить соответствующее положение передачи из множества положений, и аккумуляторное устройство выполнено с возможностью подачи электрической мощности к первой вращающейся машине и второй вращающейся машине и получения электрической мощности от первой вращающейся машины и второй вращающейся машины,
устройство управления приводом, содержащее
электронный блок управления, выполненный с возможностью управления расцеплением устройства зацепления на стороне расцепления из числа заранее определенных устройств зацепления, устанавливающих положение передачи перед переключением, и зацепления устройства зацепления на стороне зацепления из числа заранее определенных устройств зацепления, устанавливающих положение передачи после переключения так, что изменяется положение передачи, установленное ступенчатой трансмиссией, упомянутый электронный блок управления, выполненный с возможностью управления во время переключения передачи ступенчатой трансмиссии выходным крутящим моментом первой вращающейся машины и крутящим моментом второй вращающейся машины на основе выходного крутящего момента двигателя и крутящего момента трансмиссии устройства зацепления на стороне хода переключения, так что скорость изменения частоты вращения второй вращающейся машины и скорость изменения частоты вращения двигателя достигают соответствующих заданных значений, при этом устройство зацепления на стороне хода переключения является устройством зацепления на стороне, продвигающей переключение, и является одним из следующих устройств: устройство зацепления на стороне расцепления и устройство зацепления на стороне зацепления, и
упомянутый электронный блок управления, выполненный с возможностью устанавливать крутящий момент трансмиссии устройства зацепления на стороне хода переключения на основе мощности двигателя, мощности, необходимой для переключения дифференциального механизма и ступенчатой трансмиссии, и мощности аккумуляторного устройства так, что предотвращается ограничение выходного крутящего момента первой вращающейся машины и выходного крутящего момента второй вращающейся машины в связи с ограничением мощности аккумуляторного устройства при переключении ступенчатой трансмиссии.
2. Устройство управления приводом по п. 1, в котором
электронный блок управления выполнен с возможностью определения того, был ли достигнут баланс входной-выходной мощности двигателя, мощности, необходимой для хода переключения, мощности аккумуляторного устройства и мощности передачи устройства зацепления на стороне хода переключения,
если электронный блок управления определяет, что баланс входной-выходной мощности не достигнут, то электронный блок управления выполнен с возможностью изменения мощности двигателя таким образом, что достигается баланс входной-выходной мощности, и
электронный блок управления выполнен с возможностью использования измененной мощности двигателя как мощности двигателя, служащей в качестве основы при установке крутящего момента трансмиссии устройства зацепления на стороне хода переключения.
3. Устройство управления приводом по п. 1 или 2, в котором
электронный блок управления выполнен с возможностью устанавливать крутящий момент трансмиссии устройства зацепления на стороне хода переключения на основе заранее установленного соотношения, где множество уровней, соответствующих величинам мощности двигателя, мощности, необходимой для хода переключения, и мощности аккумуляторного устройства, используются как параметры так, что крутящий момент трансмиссии устройства зацепления на стороне хода переключения читается как считанное значение, соответствующее параметрам.
4. Устройство управления приводом по п. 3, в котором
при переключении на повышающую передачу ступенчатой трансмиссии электронный блок управления выполнен с возможностью выполнения переключения на повышающую передачу всей трансмиссии, где дифференциальный механизм и ступенчатая трансмиссия расположены последовательно,
электронный блок управления выполнен с возможностью выполнения перехода на понижающую передачу всей трансмиссии, когда ступенчатую трансмиссию переключают на понижающую передачу, и
количество уровней переключения на понижающую передачу ступенчатой трансмиссии с включенным двигателем больше, чем количество уровней переключения на повышающую передачу ступенчатой трансмиссии с включенным двигателем.
5. Способ управления приводом гибридного автомобиля, при этом гибридный автомобиль содержит двигатель, дифференциальный механизм, ведущее колесо, первую вращающуюся машину, вторую вращающуюся машину, ступенчатую трансмиссию, аккумуляторное устройство и электронный блок управления, дифференциальный механизм содержит первый вращающийся элемент, с которым соединен двигатель с возможностью передачи мощности, второй вращающийся элемент, с которым соединена первая вращающаяся машина с возможностью передачи мощности, и третий вращающийся элемент, с которым соединен промежуточный элемент трансмиссии, вторая вращающаяся машина соединена с промежуточным элементом трансмиссии с возможностью передачи мощности, ступенчатая трансмиссия является частью пути передачи мощности между промежуточным элементом трансмиссии и ведущим колесом, ступенчатая трансмиссия выполнена с возможностью введения в зацепление заранее определенных устройств зацепления из множества устройств зацепления так, чтобы установить соответствующее положение передачи из множества положений, аккумуляторное устройство выполнено с возможностью подачи электрической мощности к первой вращающейся машине и второй вращающейся машине и получения электрической мощности от первой вращающейся машины и второй вращающейся машины,
способ управления приводом включает в себя:
управление с использованием электронного блока управления расцеплением устройства зацепления на стороне расцепления из числа заранее определенных устройств зацепления, устанавливающих положение передачи перед переключением, и зацеплением устройства зацепления на стороне зацепления из числа заранее определенных устройств зацепления, устанавливающих положение передачи после переключения так, что изменяется положение передачи, установленное ступенчатой трансмиссией;
управление с использованием электронного блока управления во время переключения передачи ступенчатой трансмиссии выходным крутящим моментом первой вращающейся машины и крутящим моментом второй вращающейся машины на основе выходного крутящего момента двигателя и крутящим моментом трансмиссии устройства зацепления на стороне хода переключения, так что скорость изменения частоты вращения второй вращающейся машины и скорость изменения частоты вращения двигателя достигают соответствующих заданных значений, при этом устройство зацепления на стороне хода переключения является устройством зацепления на стороне, продвигающей переключение, и является одним из следующих устройств: устройство зацепления на стороне расцепления и устройство зацепления на стороне зацепления; и
установку с использованием электронного блока управления крутящего момента трансмиссии устройства зацепления на стороне хода переключения на основе мощности двигателя, мощности, необходимой для переключения дифференциального механизма и ступенчатой трансмиссии, и мощности аккумуляторного устройства так, что предотвращается ограничение выходного крутящего момента первой вращающейся машины и выходного крутящего момента второй вращающейся машины в связи с ограничением мощности аккумуляторного устройства при переключении ступенчатой трансмиссии.
| JP 2014223888 A, 04.12.2014 | |||
| US 2013184920 A1, 18.07.2013 | |||
| US 2005103544 A1, 19.05.2005 | |||
| Устройство для измерения поступательного перемещения чувствительных элементов приборов | 1961 |
|
SU147824A1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |

