Изобретение относится к контрольно-измерительной технике и может быть использовано в приборостроении при разработке, изготовлении и диагностике интеллектуальных датчиков и измерительных систем различного типа.
В настоящее время, в связи с повышением требований к надежности и эффективности систем управления различного вида, повышаются требования к их метрологическому обеспечению, т.е. к обеспечению необходимой достоверности измерительной информации. Основные проблемы обеспечения достоверности измерительной информации связаны с датчиками: их компоненты стареют, параметры со временем изменяются. Возникают и внезапные дефекты. Все это может приводить к ошибкам в управлении [R. Taymanov, K. Sapozhnikova, Metrological Self-Check and Evolution of Metrology, Measurement, 43, 2010, pp.869-877]. Основными путями решения проблемы обеспечения достоверности информации являются уменьшение межкалибровочного (межповерочного) интервала и различные способы резервирования и комплексирования датчиков. Ни один из этих методов нельзя признать оптимальным. Первый метод резко повышает затраты на эксплуатацию системы и он может быть просто не применим в силу особенностей ее эксплуатации. Кроме того, метод не дает гарантии сохранения параметров системы во время межповерочного интервала. Использование второго метода может быть ограничено конструктивными особенностями системы, ее тактико-техническими характеристиками и требованием независимости воздействия внешних условий на параметры датчика.
Согласно ГОСТ Р 8.673-2009. ГСИ. «Датчики интеллектуальные и системы измерительные интеллектуальные. Термины и определения», стр.4, пп.3.11 эту проблему для интеллектуальных датчиков предлагается решить за счет реализации в них функции самоконтроля. Там же, на стр.2-3, 7, функцию самоконтроля предлагается реализовать путем анализа опорной величины, получаемой в ходе эксплуатации датчика (измерительной системы). При этом результат анализа может быть выражен в статусе результата измерений.
Главной проблемой при таком подходе является получение опорной величины. Обычно способ генерации опорной величины определяется после тщательного анализа источников погрешности и определения критической составляющей погрешности.
Известен способ контроля метрологической исправности [патент RU №2321829 C2, МПК G01D 3/00, опубл. 20.10.2007, «Способ контроля метрологической исправности измерительного преобразователя неэлектрической величины и устройство для его осуществления»], при котором в чувствительном элементе выделяются (формируются) части, имеющие разную чувствительность к фактору, влияющему на исправность преобразователя. В процессе эксплуатации периодически измеряют значения от этих частей с чувствительностью, достаточной для выявления нарастания погрешности измерительного преобразователя, и по ним судят о его метрологической исправности, т.е. опорная величина формируется путем сравнения сигналов от частей первичного преобразователя, имеющих разую чувствительность к возмущающему фактору. Недостатком данного способа является отсутствие возможности непосредственно в процессе эксплуатации осуществлять коррекцию характеристики преобразователя, что связано с тем, что в указанном устройстве неизвестно соотношение между погрешностями, вызванными систематическими и случайными составляющими.
Известен способ контроля метрологической исправности [патент RU №2444707, МПК G01D 3/00, опубл. 07.10.2010, «Измерительный преобразователь температуры с контролем метрологической исправности»], согласно которому для формирования опорного сигнала, как и в предыдущем способе, сравниваются значения показаний частей чувствительного элемента, имеющих разную зависимость от возмущающего фактора, в котором, однако, одна часть чувствительного элемента выполнена из нескольких, преимущественно двух, параллельно соединенных проводников, причем суммарные площади поперечных сечений чувствительных элементов соизмеримы друг с другом. Это повышает достоверность коррекции результата измерений температуры непосредственно в процессе эксплуатации и дает возможность увеличения межкалибровочного интервала
Известен способ [Иванова Е.П., Курская Т.Н., Шрамко С.В. О некоторых аспектах применения самокалибрующихся датчиков температуры // ТЕМПЕРАТУРА-2011: 4-я Всероссийская и стран КООМЕТ конференция по проблемам термометрии. Тезисы (Санкт-Петербург, 19-21 апреля). Стр.63-65], основанный на использовании для самодиагностики датчиков температуры точки фазовых переходов (плавления) реперных металлов. Способ заключается в использовании дополнительного нагревателя и ампулы с реперным металлом. Для проверки метрологической исправности термопреобразователя включается дополнительный нагреватель, нагревающий ампулу и собственно термопреобразователь до температуры, превышающей точку плавления реперного металла. Возникающее в момент плавления реперного металла температурное «плато» использовалось как опорный сигнал для проверки работы основного первичного преобразователя. Недостатками способа являются ограниченное число контрольных точек и необходимость сложного подбора реперных металлов.
Общим недостатком для всех указанных способов является ориентация на конкретный тип и конструкцию датчиков.
Наиболее близким к заявляемому решению является способ тестовых воздействий [Стрелкова О.В., Шестаков А.Л. Алгоритм оценки состояния термопреобразователя сопротивления с использованием тестовых воздействий. // ИЗМЕРЕНИЯ-2008: Международная научно-техническая конференция. Труды конференции (Пенза, 22-24 октября), стр.13-16], который заключается в том, что в процессе работы датчика периодически изменяют значение контролируемого датчиком параметра. В качестве опорной величины и основы формирования статуса измерения используется реакция датчика на эти изменения. Недостатками способа является то, что он требует разработки метода генерации воздействия, соответствующего изменения конструкции датчика, и не реализует полного контроля функции преобразования. При этом необходимо контролировать стабильность воздействия, что порождает очередной круг проблем.
Задача, на решение которой направлено заявляемое изобретение, заключается в разработке универсального способа оценки метрологического состояния датчика физической величины в режиме непрерывного технологического процесса.
Указанная задача достигается тем, что в целях формирования статуса результата измерений интеллектуального датчика, формируют верхнее и нижнее пороговые значения опорного сигнала, причем нижнее пороговое значение меньше единицы, а верхнее больше, сравнивают значения опорного сигнала с пороговыми значениями, причем, если значение опорного сигнала находится в диапазоне между верхним и нижним пороговыми значениями или равно им, измерению присваивают статус - подтвержденное, а в случае выхода за границы, определяемые верхним и нижним пороговыми значениями, - недостоверное, согласно изобретению для формирования опорного сигнала выходной сигнал датчика разделяют на две аддитивные компоненты, первая из которых не зависит от шумовой компоненты на входе датчика, а вторая ей прямо пропорциональна, регистрируют энергию второй компоненты датчика и в качестве опорного сигнала принимают отношение текущей энергии компоненты к значению ее энергии в момент, когда датчик был гарантировано исправен.
Сущность изобретения поясняется следующими графическими материалами:
Фиг.1 - общая блок-схема датчика физического параметра;
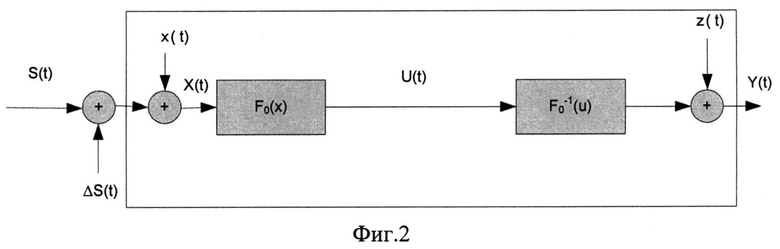
Фиг.2 - блок-схема датчика физической величины при отклонении функции преобразования сенсора от эталонной;
Фиг.3 - пример реализации способа для аддитивной смеси узкополосного низкочастотного полезного сигнала и белого шума.
Рассмотрим задачу оценки значения параметра, воздействующего на датчик в условиях возможного «дрейфа» характеристик датчика. В общем случае, блок-схему формирования выходного сигнала датчика можно представить в виде, показанном на фиг.1.
Исходя из представленной блок-схемы, сигнал Y(t) на выходе датчика будет иметь вид

Где Y(t) - регистрируемый сигнал на выходе датчика, S(i) - измеряемый сигнал на входе датчика, U(t) - сигнал на выходе первичного преобразователя, ξ(t), ς(t) - аддитивные помехи на входе и выходе датчика соответственно. F0(x), F1(u) - функции преобразования первичного преобразователя (ФППП) и линеаризующего электронного блока соответственно. Здесь и в дальнейшем подразумевается, что датчик можно считать безинерционным устройством в диапазоне частот измеряемого параметра.
Если преобразование F0 однозначно и 

Формула 2 является основной формулой при использовании сигнала с датчика в расчетах систем управления и обработки информации.
Однако это справедливо лишь при выполнении указанных выше условий:
1. Преобразование F0 однозначно.
2. 
Рассмотрим случай, когда условие (2) не выполняется, т.е. ФППП искажена в силу каких-либо причин относительно исходной F0. Тогда можно принять, что F=F0+ΔF, где F - истинная функция преобразования, F0 - функция преобразования, принятая при расчетах, ΔF - вариация функции преобразования, удовлетворяющая условию близости функций F и F0, по крайней мере 1-го порядка.
Тогда вариацию ΔF можно пересчитать к входу блок-схемы фиг.1 и она примет вид фиг.2. Отличием фиг.2 от фиг.1 является дополнительная помеха ΔS датчика. При этом заметим, что функция преобразования считается неизменной, т.е. соотношение (2) остается справедливым с соответствующей коррекцией ξ(t).
Дополнительную помеху ΔS находим из условия

Условие (3) означает, что искажения сигнала на входе при неизменной функции преобразования аналогичны, с точки зрения дальнейшей обработки, искажениям функции преобразования при неизменном входном сигнале.
Принимая ΔS настолько малым, что оно обеспечивает малость ΔF (это надо будет рассматривать отдельно), можно записать
F0(x)+F'0(x)Δs=F0(x)+ΔF(x).
Отсюда получаем выражение для ΔS:

В (4) под x понимается суммарный сигнал, действующий на входе первичного преобразователя, т.е. 
Учитывая (2), (4) и (5) и считая, что шумы на входе значительно превышают собственные шумы датчика (т.е. ς(t) можно пренебречь), будем иметь

Или

Принимая, что ξ(t) также достаточно мало по отношению к полезному сигналу, получим выражение для выходного сигнала датчика с учетом искажения функции преобразования.
Таким образом, что можно считать, что отклонения фактической ФИНН относительно эталонной можно заменить введением дополнительной шумовой составляющей на входе эталонного сенсора.

В выражении (8) можно выделить части, зависящие и не зависящие от ξ


Если о характеристиках входного сигнала и помехи ничего не известно, то разделить сигнал (8) на компоненты (9)-(10) и оценить искажения функции преобразования не представляется возможным. Однако, как минимум, есть два случая, когда получение этой оценки реализовать достаточно просто:
- метод тестовых воздействий (когда сами формируем ξ(t)),
- предположение о постоянном аддитивном белом шуме на входе, которое является обычной практикой при анализе информационных и управляющих систем.
В первом случае для разделения Y(t) на компоненты Ys(t) и Yξ(t) возможно использование методов выделения сигала известной формы ξ(t) на фоне неизвестной помехи, которой в этом случае является сигнал S(t), во втором можно использовать различные методы фильтрации, которые позволяют разделить сигналы с различными корреляционными функциями (у белого шума ξ(t) это δ - функция, у сигала S(t) - обычно корреляционная функция узкополосного процесса). В обоих случаях задача оценки ΔF сводится к решению системы дифференциальных уравнений (9-10) относительно неизвестных S(t) и ΔF(x).
В случае, если стоит только задача обнаружения искажений F0, то можно просто контролировать отклонения Yξ(t) от постоянной величины при изменении сигнала. В первом случае это сводится к контролю постоянства амплитуды отклика на тестирующее воздействие, а во втором - к контролю постоянства дисперсии шумового сигнала в процессе работы. В зависимости от степени флуктуации сигнала Yξ(t) можно получить оценку достоверности измерения сигнала S(t).
Таким образом, для решения поставленной технической задачи предлагается для формирования опорной величины использовать отклонение амплитуды (дисперсии) компоненты сигнала Yξ(t) от постоянной величины в процессе работы.
В случае, если на вход датчика с нелинейной функцией преобразования воздействует узкополосный низкочастотный сигнал в смеси со стационарным белым шумом (фиг.3), тогда заявляемый способ можно реализовать следующим образом.
Полезный сигнал S(t) в смеси с шумом ξ(t) поступает на вход датчика, первичный преобразователь 1 которого имеет нелинейную функцию преобразования. Так как полезный сигнал предполагается узкополосным низкочастотным, то, в простейшем случае, его можно выделить с помощью простейшего низкочастотного фильтра 3. Тогда разница сигнала на входе и выходе низкочастотного фильтра 3 позволяет оценить шумовую компоненту сигнала.
В случае, если электронный блок 2 датчика компенсирует нелинейность преобразователя 1 (датчик метрологически исправен) и собственным шумом датчика можно пренебречь, можно считать, что Ys(t)=S(t) и Yξ(t)=ξ(t) Тогда вычислитель дисперсии сигнала Yξ(t) выдаст величину 
В качестве априорного значения дисперсии можно использовать величину, полученную при гарантированно исправном состоянии датчика (начало его работы).
Рассогласование характеристик первичного преобразователя 1 и электронного блока 2 (возникновение метрологической неисправности) относительно сигнала Yξ(t) вызовет два эффекта:
- смещение постоянной составляющей 
- возникновение модуляции 
И тот и другой эффекты вызовут отклонение отношения 
Таким образом, приведенные выше сведения подтверждают возможность осуществления заявленного изобретения, достижения указанного технического результата и решения поставленной задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ шумовой автоматической регулировки порога | 2023 |
|
RU2794928C1 |
| Способ обнаружения импульсных оптических сигналов | 2023 |
|
RU2810708C1 |
| Способ обнаружения оптических сигналов с помощью лавинного фотодиода | 2023 |
|
RU2815330C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ РАДИОСИГНАЛА В АКУСТООПТИЧЕСКИХ ПРИЕМНИКАХ-ЧАСТОТОМЕРАХ | 2009 |
|
RU2428702C1 |
| СПОСОБ УСИЛЕНИЯ АМПЛИТУДНО-МОДУЛИРОВАННЫХ И ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2128874C1 |
| Система для разработки интеллектуального датчика | 2019 |
|
RU2714039C1 |
| СПОСОБ КОНТРОЛЯ МЕТРОЛОГИЧЕСКОЙ ИСПРАВНОСТИ ИНТЕЛЛЕКТУАЛЬНОГО СРЕДСТВА ИЗМЕРЕНИЙ | 2012 |
|
RU2491510C1 |
| Среднеквадратичный милливольтметр | 2023 |
|
RU2800397C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОМПЛЕКСНОЙ ЧАСТОТНОЙ ЗАВИСИМОСТИ ПЕРЕДАТОЧНОГО ИМПЕДАНСА ПАРЫ ИЗЛУЧАТЕЛЬ-ПРИЕМНИК В СВОБОДНОМ ПОЛЕ | 2014 |
|
RU2568070C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2007 |
|
RU2367970C2 |

Изобретение относится к контрольно-измерительной технике и может быть использовано в приборостроении при разработке, изготовлении и диагностике интеллектуальных датчиков и измерительных систем различного типа. Формируют верхнее и нижнее пороговые значения опорного сигнала, причем нижнее пороговое значение меньше единицы, а верхнее больше. Сравнивают значения опорного сигнала с пороговыми значениями, причем, если значение опорного сигнала находится в диапазоне между верхним и нижним пороговыми значениями или равно им, измерению присваивают статус - подтвержденное, а в случае выхода за границы, определяемые верхним и нижним пороговыми значениями, - недостоверное. Для формирования опорного сигнала выходной сигнал датчика разделяют на две аддитивные компоненты, первая из которых не зависит от шумовой компоненты на входе датчика, а вторая ей прямо пропорциональна. Регистрируют энергию второй компоненты датчика, и в качестве опорного сигнала принимают отношение текущей энергии компоненты к значению ее энергии в момент, когда датчик был гарантировано исправен. Технический результат заключается в возможности оценки метрологического состояния датчика физической величины в режиме непрерывного технологического процесса. 3 ил.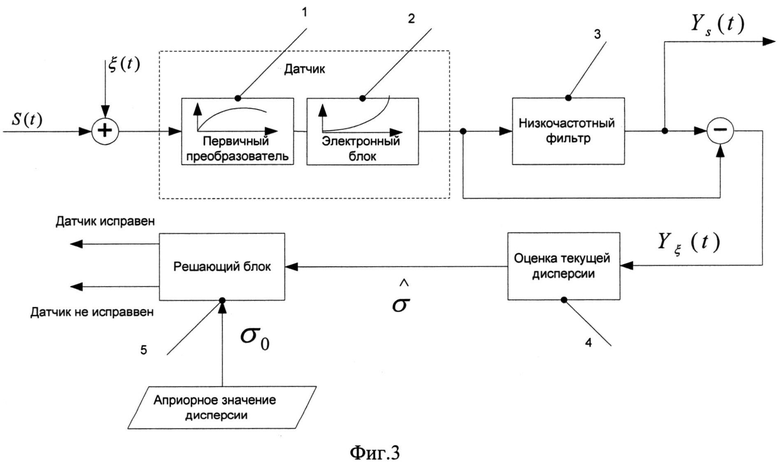
Способ формирования статуса результата измерений интеллектуального датчика путем формирования опорного сигнала, определения его верхнего и нижнего пороговых значений, причем нижнее пороговое значение меньше единицы, а верхнее больше, сравнения текущего значения опорного сигнала с пороговыми значениями, причем, если значение опорного сигнала находится в диапазоне между верхним и нижним пороговыми значениями или равно им, измерению присваивают статус - подтвержденное, а в случае выхода за границы, определяемые верхним и нижним пороговыми значениями, - недостоверное, отличающийся тем, что для формирования опорного сигнала выходной сигнал датчика разделяют на две аддитивные компоненты, первая из которых не зависит от шумовой компоненты на входе датчика, а вторая ей прямо пропорциональна, регистрируют энергию второй компоненты датчика, и в качестве опорного сигнала принимают отношение текущей энергии компоненты к значению ее энергии в момент, когда датчик был гарантировано исправен.
| Тайманов Р.Е., Сапожникова К.В., "Метрологический самоконтроль датчиков", Труды конференции "Технические и программные средства систем управления, контроля и измерения", Москва, октябрь 2010 | |||
| ШАБЛИЦКИЙ А.Ю., ДОЛЯ В.К., "МЕТРОЛОГИЧЕСКИЙ САМОКОНТРОЛЬ В ИНТЕЛЛЕКТУАЛЬНОМ АКУСТИЧЕСКОМ ПЬЕЗОЭЛЕКТРИЧЕСКОМ ДАТЧИКЕ", Известия высших учебных заведений. |

