Предлагаемое изобретение относится к обнаружению сигналов на фоне флуктуационного шума, в частности, к технике приема импульсных оптических сигналов, и может быть использовано в локации, связи и других областях.
Известен способ приема импульсных оптических сигналов с помощью лавинных фотодиодов [1-3]. Известны также способы стабилизации лавинного режима фотодиода, например, путем термокомпенсации рабочей точки напряжения смещения [4]. Указанные решения не обеспечивают максимального отношения сигнала к шуму, поскольку не контролируют это отношение. Знание дисперсии шума важно для правильного построения режима порогового выделения сигналов [4]. Известные методы определения параметров шума, в том числе его дисперсии и шум-фактора [5-9] либо приближенно рассчитываются с учетом общих физических основ построения таких структур, либо требуют привлечения сложных стационарных приборов, основанных на метрологических принципах, непригодных для портативной аппаратуры, работающей в широком диапазоне внешних эксплуатационных воздействий.
Наиболее близким к предлагаемому техническому решению является способ порогового обнаружения оптических сигналов [10], включающий пороговую обработку сигналов и формирование выходных импульсов при превышении сигналом с выхода фотодиода заданного порога срабатывания, предварительно определяют частоту f0 пересечения шумом нулевого порога, включают безлавинный режим смещения фотодиода, устанавливают порог срабатывания U на уровне, соответствующем частоте шумовых срабатываний порогового устройства f1 << f0, увеличивают порог в  раз, фиксируют этот порог, затем, управляя напряжением смещения UM лавинного фотодиода, устанавливают на нем такой коэффициент лавинного умножения М, при котором частота шумовых превышений порога fM соответствует значению fM=f1, после чего фиксируют напряжение смещения на этом уровне и повышают порог в
раз, фиксируют этот порог, затем, управляя напряжением смещения UM лавинного фотодиода, устанавливают на нем такой коэффициент лавинного умножения М, при котором частота шумовых превышений порога fM соответствует значению fM=f1, после чего фиксируют напряжение смещения на этом уровне и повышают порог в  раз до уровня, при котором частота шумовых превышений порога в рабочем режиме соответствует заданным требованиям.
раз до уровня, при котором частота шумовых превышений порога в рабочем режиме соответствует заданным требованиям.
Недостатком указанной процедуры является отсутствие возможности определения параметров шума, в том числе постоянного параметра α шум-фактора F=Мα, определяющего оптимальную величину М и необходимого для организации правильного режима обработки смеси сигнала и шума.
Задачей изобретения является оперативное определение постоянного параметра α шум-фактора лавинного умножения в процессе проектирования, производства и обслуживания аппаратуры без привлечения специального измерительного оборудования и средств его метрологического обеспечения.
Эта задача решается за счет того, что в известном способе обнаружения импульсных оптических сигналов, включающем пороговую обработку сигналов и формирование выходных импульсов при превышении выходным сигналом фотодиода заданного порога срабатывания, предварительно определяют частоту f0 пересечения шумом нулевого порога, включают безлавинный режим смещения фотодиода, устанавливают порог срабатывания U на уровне, соответствующем частоте шумовых срабатываний порогового устройства f1 << f0, увеличивают порог в  раз, фиксируют этот порог
раз, фиксируют этот порог  затем, управляя напряжением смещения лавинного фотодиода, устанавливают на нем такой коэффициент лавинного умножения М, при котором частота шумовых превышений порога fMA соответствует значению f1, после чего фиксируют напряжение смещения на этом уровне и повышают порог в
затем, управляя напряжением смещения лавинного фотодиода, устанавливают на нем такой коэффициент лавинного умножения М, при котором частота шумовых превышений порога fMA соответствует значению f1, после чего фиксируют напряжение смещения на этом уровне и повышают порог в  раз до уровня
раз до уровня  при котором частота шумовых превышений порога соответствует заданным требованиям, вводят режим определения параметра α шум-фактора лавинного умножения F=Мα, в котором выбирают частоту f1=fA, отвечающую условию
при котором частота шумовых превышений порога соответствует заданным требованиям, вводят режим определения параметра α шум-фактора лавинного умножения F=Мα, в котором выбирают частоту f1=fA, отвечающую условию  где NA=fAT - количество превышений порогового уровня шумовыми выбросами за время Т измерения частоты, ξ << 1 - коэффициент заданной точности определения NA, задают частоту превышений порога шумовыми выбросами
где NA=fAT - количество превышений порогового уровня шумовыми выбросами за время Т измерения частоты, ξ << 1 - коэффициент заданной точности определения NA, задают частоту превышений порога шумовыми выбросами  где α0 - номинальное значение параметра α, устанавливают напряжение смещения фотодиода, при котором коэффициент лавинного умножения М=1, устанавливают порог срабатывания U на уровне, при котором средняя частота его превышений выбросами шума равна fMA, затем увеличивают порог в
где α0 - номинальное значение параметра α, устанавливают напряжение смещения фотодиода, при котором коэффициент лавинного умножения М=1, устанавливают порог срабатывания U на уровне, при котором средняя частота его превышений выбросами шума равна fMA, затем увеличивают порог в  раз, тем самым снижая частоту шумовых превышений порога до уровня fA, и устанавливают коэффициент лавинного умножения М, при котором частота шумовых превышений порога становится равной fMA, в этом режиме увеличивают порог в
раз, тем самым снижая частоту шумовых превышений порога до уровня fA, и устанавливают коэффициент лавинного умножения М, при котором частота шумовых превышений порога становится равной fMA, в этом режиме увеличивают порог в  раз, определяют среднюю частоту шумовых превышений порога fA* и вычисляют параметр α шум-фактора лавинного умножения F=Мα по формуле
раз, определяют среднюю частоту шумовых превышений порога fA* и вычисляют параметр α шум-фактора лавинного умножения F=Мα по формуле  а в режиме приема сигналов по измеренному значению α устанавливают коэффициенты повышения порога
а в режиме приема сигналов по измеренному значению α устанавливают коэффициенты повышения порога  и
и  согласно выражениям
согласно выражениям  где
где  причем, порог U устанавливают так, чтобы частота f1 была минимально возможной при обеспечении требуемой точности ее определения, затем устанавливают коэффициент лавинного умножения М, при котором частота шумовых превышений порога становится равной fM, после чего увеличивают порог до уровня
причем, порог U устанавливают так, чтобы частота f1 была минимально возможной при обеспечении требуемой точности ее определения, затем устанавливают коэффициент лавинного умножения М, при котором частота шумовых превышений порога становится равной fM, после чего увеличивают порог до уровня  и производят прием сигналов.
и производят прием сигналов.
Ввиду постоянства коэффициента α, определяемого конструкцией фотодиода, процедура определения параметра α может быть выполнена однократно, вне процесса приема сигналов.
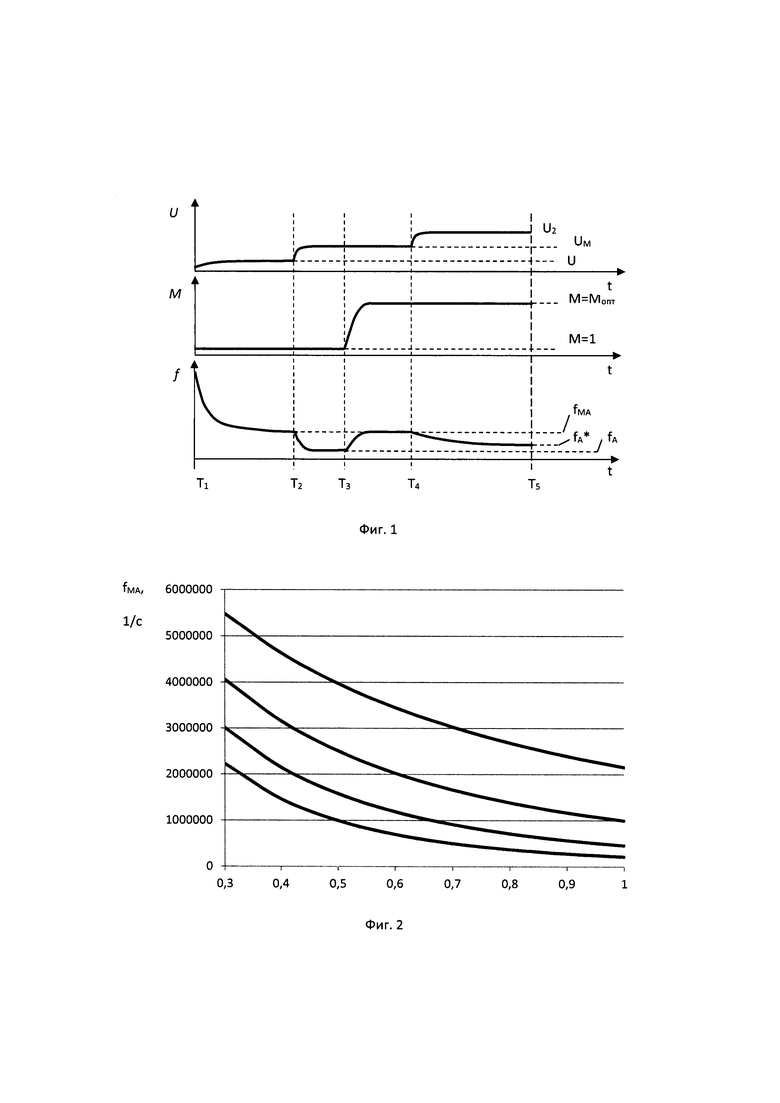
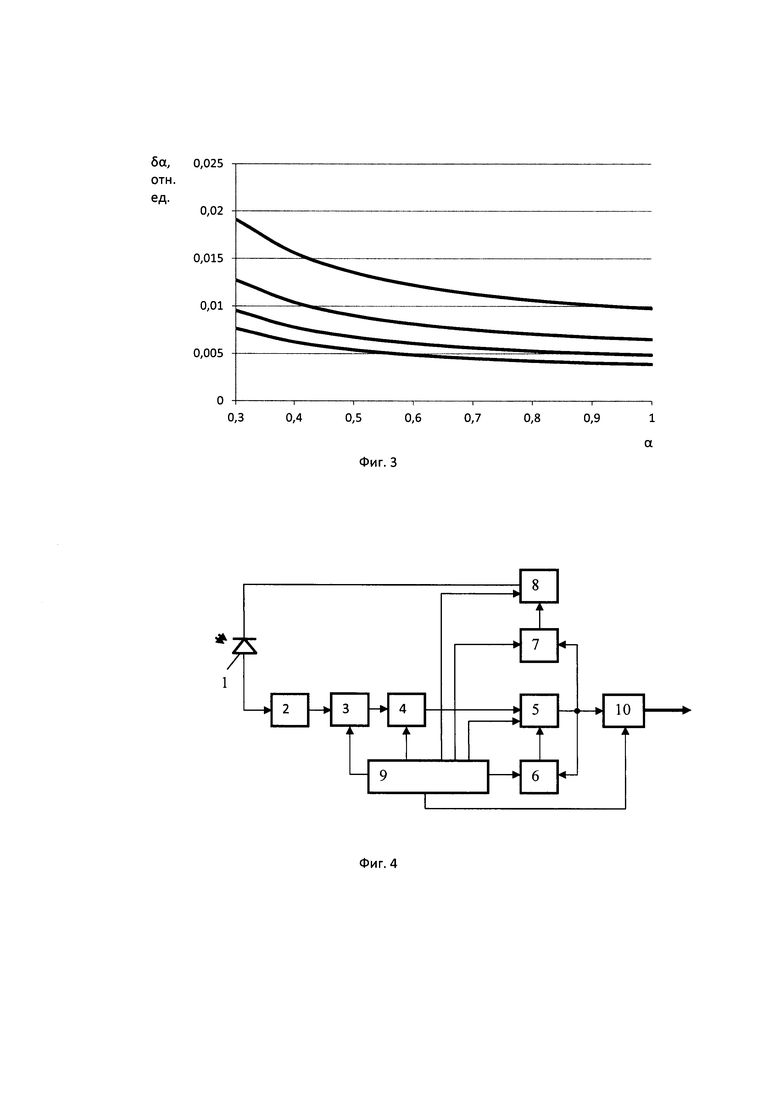
Фиг. 1 представляет циклограмму способа в режиме определения α. На фиг.2 приведены графики зависимости частоты шумовых выбросов от параметра α. На фиг.3 приведены графики зависимости погрешности оценки α* относительно истинного значения α. На фиг.4 представлена структурная схема аппаратуры, реализующей способ.
Предлагаемый способ основан на использовании статистических закономерностей выбросов случайных процессов и заключается в следующем.
На первом этапе осуществления способа в режиме определения коэффициента а устанавливают безлавинный режим фотодиода М=1 путем подачи на него низкого напряжения смещения. В этом режиме устанавливают порог срабатывания на таком уровне, чтобы частота превышения порога шумовыми выбросами приняла номинальное значение fMA (фиг.1, Т2). На втором этапе увеличивают порог в  раз до уровня UM, при этом частота шумовых выбросов уменьшается до значения fA (фиг.1, Т3). Регулируя напряжение смещения фотодиода, устанавливают такой коэффициент лавинного умножения М=Мопт, при котором частота шумовых превышений порога снова принимает значение fMA (фиг.1, Т4). После установления величины М еще раз увеличивают порог в
раз до уровня UM, при этом частота шумовых выбросов уменьшается до значения fA (фиг.1, Т3). Регулируя напряжение смещения фотодиода, устанавливают такой коэффициент лавинного умножения М=Мопт, при котором частота шумовых превышений порога снова принимает значение fMA (фиг.1, Т4). После установления величины М еще раз увеличивают порог в  раз и определяют частоту шумовых превышений fA*, по которой судят об истинном значении α.
раз и определяют частоту шумовых превышений fA*, по которой судят об истинном значении α.
Известно [1, 3], что в без лавинном режиме (М=1) квадрат среднеквадратического значения шума σ на выходе фотодиода

где σ0 и σ1 - соответственно среднеквадратические значения неумножаемой (σ0) и умножаемой (σ1) составляющих шума.
Частота f пересечений порога U выбросами нормально распределенного шума

где  - частота пересечения шумом нулевого порога;
- частота пересечения шумом нулевого порога;
R(τ) - корреляционная функция шума; σ2 - дисперсия шума [12].
Параметры f и σ2 связаны однозначным соотношением (2), избавляющим от необходимости отдельного измерения этих параметров с помощью громоздкой лабораторной аппаратуры, требующей особых условий эксплуатации и сложного метрологического обеспечения [6-9].
Зная частоты f и f0 из (2) можно определить отношение порог/шум

В лавинном режиме [1]

где α - параметр шум-фактора лавинного умножения F=Мα, определяемый материалом и структурой фотодиода [3, 6, 10].

Обратная η2 величина W (квадрат отношения шум/сигнал)

Производная этой величины

Минимум отношения шум/сигнал обеспечивается при dW/dM=0.

Условие (8) выполняется при
Частота шумовых превышений порога в лавинном режиме

Подстановка (9) в (10) дает выражение частоты шумовых превышений порога при М=Мопт. С учетом всегда имеющего место условия σ02 >> σ12 частота шума в лавинном режиме fp

Из (2) и (11) в условиях определения коэффициента α получается отношение частот f=fMA(M=Mопт) И f=fA(M=1).

Подстановка (3) в (12) дает

Как следует из (12) и (13), при постоянных значениях коэффициента а, зависящего от конструкции фотодиода, и отношения U/σ, задаваемого частотой f, отношение fМА/fA полностью определяется этими параметрами и также является постоянным параметром способа.
Соотношение (13) можно представить в виде зависимостей fMA(α), α(fA) и fA(fMA), используемых при подготовке и в процессе измерения α.



Измерение α производят в следующем порядке (фиг.1).
1. Предварительно определяют и запоминают среднюю частоту шумовых пересечений нуля f0.
2. Выбирают диапазон частот fA…fMA так, чтобы в нижней границе этого диапазона соблюдалось условие [14]

где Т - время измерения частоты fA; NA - минимальное количество шумовых превышений порога за время Т, при котором выполняется условие (17).
Пример 1
 откуда NA≥10000.
откуда NA≥10000.
3. Определяют номинальное значение fMA верхней границы частот шумовых выбросов по формуле (14) при номинальном для исследуемой полупроводниковой структуры параметре α=α0.
Пример 2
α0=0,5; f0=107; NA=10000; T=1с.
fA=NA/T=10000 1/c.

4. Устанавливают порог срабатывания U на таком уровне, чтобы средняя частота его превышения шумовыми выбросами составляла fMA.
5. Увеличивают порог в  раз и фиксируют его на уровне
раз и фиксируют его на уровне  При этом частота шумовых выбросов снижается до уровня fA.
При этом частота шумовых выбросов снижается до уровня fA.
6. Увеличивают напряжение смещения фотодиода до величины, при которой частота шумовых превышений порога станет равной fMA.
7. Увеличивают порог в  раз и определяют частоту шумовых выбросов fA*. Если коэффициент α=α0, то частота fА*=tА.
раз и определяют частоту шумовых выбросов fA*. Если коэффициент α=α0, то частота fА*=tА.
8. При fА* ≠ fA определяют фактическое значение а по формуле
Пример 3
fA=11000 (fA=10100) 1/с; α0=0,5.

Следует отметить высокую устойчивость описанной процедуры к дестабилизирующим факторам: погрешность измерения fA, равная 1%, приводит к ошибке определения параметра α, не более 0,13%. С другой стороны, малые отклонения α от номинального значения вызывают значительные изменения измеряемой частоты fA*, что характеризует высокую чувствительность метода.
Определение частоты как отношения N/T с одной стороны обеспечивает простоту реализации способа, поскольку сводит эту процедуру к подсчету количества выбросов N за эталонное время Т. Обе эти операции реализуются простейшими серийными средствами микроэлектроники, в том числе, в составе миниатюрных фотоприемных устройств, работающих в портативной аппаратуре, применяемой в широких эксплуатационных условиях. С другой стороны, эти операции выполняются с высокой «цифровой» точностью и имеют простое и органичное метрологическое обеспечение без привлечения аналоговых средств, требующих специальных эксплуатационных ограничений и регулярной калибровки.
На фиг.2 показана зависимость (14) для α от 0,3 до 1 и для ряда значений fA от 100 до 100000 1/с.
На фиг.3 приведены графики относительной погрешности δα измерения α в зависимости от α и того же ряда значений fA при относительной погрешности измерения δ fА=0,01. Видно, что погрешность измерения снижается с ростом α и уменьшением частоты fA. Последнее следует учитывать при соблюдении условия (17). При этом необходимо иметь в виду, что время измерения Т увеличивается с уменьшением fА.
Способ реализуется в системе фотоприемного устройства и может применяться при проведении научных исследований, проектировании и производстве аппаратуры переключением работы фотоприемного устройства из режима приема сигналов в режим контроля шум-фактора.
Возможный вариант измерительной структуры по предлагаемому способу (фиг.4) содержит лавинный фотодиод 1, выход которого через согласующий усилитель 2 и управляемые аттенюаторы 3 и 4 подключен к входу порогового формирователя импульсов 5. Выход последнего связан с входами датчиков частоты 6 и 7. Датчик 6 подключен к управляющему входу порогового формирователя 5, а датчик 7 - к источнику смещения фотодиода 8. Датчики 6 и 7 и аттенюаторы 3 и 4 подключены к блоку управления 9. На выходе порогового формирователя установлено решающее устройство 10, связанное с блоком управления.
Способ осуществляется следующим образом.
Предварительно (на этапе проектирования) устанавливают: частоту f0, определяемую полосой пропускания приемного тракта 1-4 до входа порогового формирователя; частоту f1 и fA, удовлетворяющие оговоренным выше ограничениям и особенностям примененных аппаратных средств; частоту fp - по предъявляемым техническим требованиям в режиме приема сигналов; номинальное значение параметра шум-фактора α=α0, определяемое конструкцией фотодиода; интервал усреднения Т датчиков частоты. Вычисляют частоты fM и fMA.
В режиме измерения α по команде с блока управления 9 устанавливают начальные параметры приемного тракта - коэффициент лавинного умножения фотодиода М=1 и начальный порог срабатывания порогового устройства U. С этой целью с помощью блока управления 9 открывают аттенюаторы 3 и 4 и устанавливают на источнике смещения 8 низкий уровень напряжения смещения, соответствующий коэффициенту лавинного умножения М=1. Одновременно устанавливают порог срабатывания U формирователя 5 так, чтобы частота f шумовых превышений порога соответствовала номинальному значению fMA (фиг.1). По достижении установившегося значения частоты fMA с помощью блока управления включают аттенюатор 3, вносящий ослабление Оптимальному режиму лавинного умножения М=Мопт [10, 13] соответствует ослабление  Введением этого ослабления эквивалентный порог становится равным
Введением этого ослабления эквивалентный порог становится равным 
Одновременно с помощью блока управления включают датчик частоты 7, управляющий коэффициентом лавинного умножения фотодиода путем подачи на него напряжения смещения, при котором частота шумовых срабатываний в лавинном режиме fM снова становится равна частоте fM0, установленной в безлавинном режиме. После этого включают второй аттенюатор с ослаблением  и определяют частоту шумовых превышений fA*.
и определяют частоту шумовых превышений fA*.
Практически частоту определяют путем подсчета количества выбросов N за время Т, формируя оценку частоты вида f ~ N/T.
N - случайная величина, с достаточной точностью описываемая распределением Пуассона с математическим ожиданием MN=N и дисперсией DN=N [14]. С учетом этого можно определить необходимое количество N по требуемой точности определения частоты. При  ошибка не превышает 1%. При этом время измерения составляет 0,1-1,0 секунды в зависимости от заданной точности измерения α.
ошибка не превышает 1%. При этом время измерения составляет 0,1-1,0 секунды в зависимости от заданной точности измерения α.
Полученные данные передают в решающее устройство 10, вычисляющее значение α, а также, при необходимости, параметры М=Мопт и шум-фактор лавинного умножения F=Мα.
В режиме приема сигналов коэффициент повышения порога  устанавливают по уточненному значению α, что позволяет реализовать оптимальное значение коэффициента лавинного умножения, при котором отношение сигнал/шум максимально.
устанавливают по уточненному значению α, что позволяет реализовать оптимальное значение коэффициента лавинного умножения, при котором отношение сигнал/шум максимально.
Если коэффициент α стабилен в течение срока службы приемной аппаратуры, то его определение можно производить не при каждом приеме сигналов, а отдельно, например, при отладке аппаратуры и изменении условий эксплуатации. Во всяком случае, измерение α по предлагаемому способу возможно в любой момент и не требует привлечения отдельных измерительных средств, так как структура приемного тракта в режимах приема сигналов и определения α совпадает. Обработка данных может производиться как на встроенном решающем устройстве, так и на удаленном вычислительном оборудовании.
Аналоговые процедуры способа не содержат нелинейных функциональных преобразований, для реализации которых требуются сложные устройства с надежной воспроизводимостью и стабильностью, а также сложным метрологическим обеспечением.
Средства, реализующие способ, обладают минимальным временем выхода на рабочий режим. Способ может быть реализован в составе штатного фотоприемного устройства, то есть, именно в той структуре, которая подлежит исследованию.
Таким образом, способ обеспечивает решение поставленной задачи - оперативное определение постоянного параметра α шум-фактора лавинного умножения в процессе проектирования, производства и обслуживания аппаратуры без привлечения специального измерительного оборудования и средств его метрологического обеспечения.
Источники информации
1. И.Д. Анисимова и др. Под ред. В.И. Стафеева. Полупроводниковые фотоприемники приемники. Ультрафиолетовый, видимый и ближний инфракрасный диапазоны спектра - М: Радио и связь, 1984 г. - 216 с.
2. Гауэр Дж. Оптические системы связи: Пер. с англ.- М: Радио и связь, 1989. -
С.340.
3. Филачев A.M., Таубкин И.И., Тришенков М.А. Твердотельная фотоэлектроника. Фотодиоды. Москва, Физматгиз. 2011, - С.201-209.
4. Патент РФ №2248670.
5. Насонов B.C. Справочник по радиоизмерительным приборам. - М.: Советское радио, 1976, т.1., 234 с.
6 Усков А.А. Измерение фактора избыточного шума лавинного фотодиода. ФГАО У ВО «Новосибирский национальный исследовательский государственный университет», Новосибирск, 2016.
7. Яковлева Н.И. и др. Исследование фотодиодных лавинных элементов матричных фотоприемных устройств на основе гетероэпитаксиальных структур InGaAs. Успехи прикладной физики, 2014, том 2, №4., с. 374-382.
8. Останин С.А. Метод измерения малых значений дисперсии белого шума в смеси с гармоническим сигналом. Известия алтайского государственного университета. 2011, №1, С.174-175.
9. Степанов А.В. Электрические шумы. Спецпрактикум кафедры физики колебаний физического факультета МГУ им. М.В. Ломоносова, 2003. - С.17-22.
10. Способ порогового обнаружения оптических сигналов. Патент РФ №2755602 -прототип.
11. Вильнер В. Г. Проектирование пороговых устройств с шумовой стабилизацией порога. - Оптико-механическая промышленность, 1984, №5, С.39-41.
12. Тихонов В.И. Выбросы случайных процессов. Гл. ред. физ.-мат.лит., 1970, - С.392.
13. Способ порогового приема оптических сигналов. Патент РФ №2756384.
14. Гмурман В.Е. Теория вероятностей и математическая статистика. «В.Ш.», 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения оптических сигналов с помощью лавинного фотодиода | 2023 |
|
RU2815330C1 |
| Способ порогового обнаружения оптических сигналов | 2023 |
|
RU2797660C1 |
| Способ обнаружения оптических сигналов | 2020 |
|
RU2755601C1 |
| Способ порогового обнаружения оптических сигналов | 2020 |
|
RU2755602C1 |
| Способ приема оптических сигналов | 2020 |
|
RU2750442C1 |
| Способ некогерентного накопления импульсных светолокационных сигналов | 2022 |
|
RU2791151C1 |
| Способ порогового обнаружения оптических сигналов | 2021 |
|
RU2778629C1 |
| Способ порогового приема оптических сигналов | 2020 |
|
RU2756384C1 |
| Способ приема импульсных оптических сигналов | 2020 |
|
RU2750444C1 |
| Способ приема сигналов | 2020 |
|
RU2750443C1 |
Изобретение относится к технике выделения сигналов из шума и может быть использовано в любой области, где требуется определение параметров шума. Способ обнаружения импульсных оптических сигналов, включающий пороговую обработку сигналов и формирование выходных импульсов при превышении выходным сигналом фотодиода заданного порога срабатывания, включает режим определения параметра α шум-фактора лавинного умножения, в котором выбирают частоту превышения порога шумовыми выбросами, задают частоту превышений порога шумовыми выбросами, устанавливают напряжение смещения фотодиода, при котором коэффициент лавинного умножения М=1, устанавливают порог срабатывания на уровне, при котором средняя частота его превышений выбросами шума равна fMA, затем увеличивают порог, тем самым снижая частоту шумовых превышений порога до уровня fA, и устанавливают коэффициент лавинного умножения М, при котором частота шумовых превышений порога становится равной fMA, в этом режиме увеличивают порог, определяют среднюю частоту шумовых превышений порога fA* и вычисляют параметр α шум-фактора лавинного умножения. Технический результат изобретения - оперативное определение параметров флуктуационного шума. 1 з.п. ф-лы, 4 ил.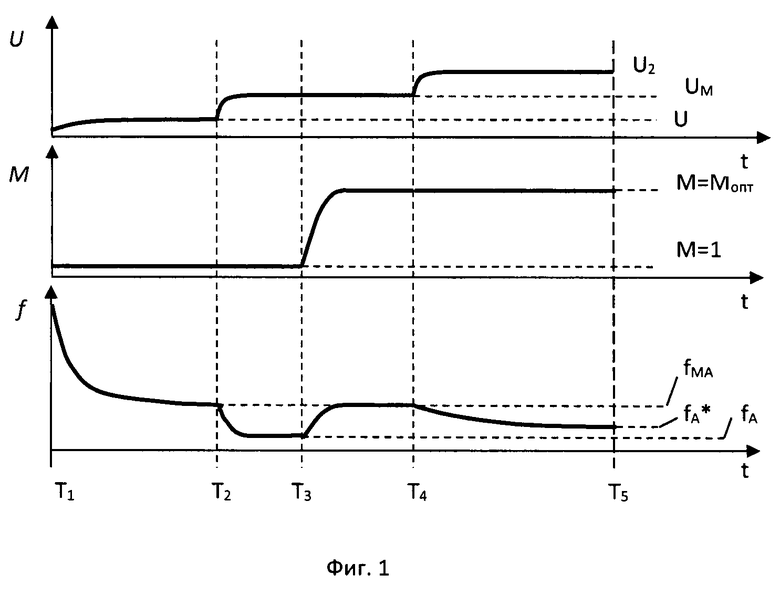
1. Способ обнаружения импульсных оптических сигналов, включающий пороговую обработку сигналов и формирование выходных импульсов при превышении выходным сигналом фотодиода заданного порога срабатывания, предварительно определяют частоту f0 пересечения шумом нулевого порога, включают безлавинный режим смещения фотодиода, устанавливают порог срабатывания U на уровне, соответствующем частоте шумовых срабатываний порогового устройства f1<<f0, увеличивают порог в  раз, фиксируют этот порог
раз, фиксируют этот порог  затем, управляя напряжением смещения лавинного фотодиода, устанавливают на нем такой коэффициент лавинного умножения М, при котором частота шумовых превышений порога fMA соответствует значению f1, после чего фиксируют напряжение смещения на этом уровне и повышают порог в
затем, управляя напряжением смещения лавинного фотодиода, устанавливают на нем такой коэффициент лавинного умножения М, при котором частота шумовых превышений порога fMA соответствует значению f1, после чего фиксируют напряжение смещения на этом уровне и повышают порог в  раз до уровня
раз до уровня  при котором частота шумовых превышений порога соответствует заданным требованиям, отличающийся тем, что вводят режим определения параметра α шум-фактора лавинного умножения F=Мα, в котором выбирают частоту f1=fA, отвечающую условию
при котором частота шумовых превышений порога соответствует заданным требованиям, отличающийся тем, что вводят режим определения параметра α шум-фактора лавинного умножения F=Мα, в котором выбирают частоту f1=fA, отвечающую условию  где NA=fAT - количество превышений порогового уровня шумовыми выбросами за время Т измерения частоты, ξ<<1 - коэффициент заданной точности определения NA, задают частоту превышений порога шумовыми выбросами
где NA=fAT - количество превышений порогового уровня шумовыми выбросами за время Т измерения частоты, ξ<<1 - коэффициент заданной точности определения NA, задают частоту превышений порога шумовыми выбросами  где α0 - номинальное значение параметра α, устанавливают напряжение смещения фотодиода, при котором коэффициент лавинного умножения М=1, устанавливают порог срабатывания U на уровне, при котором средняя частота его превышений выбросами шума равна fMA, затем увеличивают порог в
где α0 - номинальное значение параметра α, устанавливают напряжение смещения фотодиода, при котором коэффициент лавинного умножения М=1, устанавливают порог срабатывания U на уровне, при котором средняя частота его превышений выбросами шума равна fMA, затем увеличивают порог в  раз, тем самым снижая частоту шумовых превышений порога до уровня fA, и устанавливают коэффициент лавинного умножения М, при котором частота шумовых превышений порога становится равной fMA, в этом режиме увеличивают порог в
раз, тем самым снижая частоту шумовых превышений порога до уровня fA, и устанавливают коэффициент лавинного умножения М, при котором частота шумовых превышений порога становится равной fMA, в этом режиме увеличивают порог в  раз, определяют среднюю частоту шумовых превышений порога fA* и вычисляют параметр α шум-фактора лавинного умножения F=Мα по формуле
раз, определяют среднюю частоту шумовых превышений порога fA* и вычисляют параметр α шум-фактора лавинного умножения F=Мα по формуле  а в режиме приема сигналов по измеренному значению α устанавливают коэффициенты повышения порога и согласно выражениям
а в режиме приема сигналов по измеренному значению α устанавливают коэффициенты повышения порога и согласно выражениям  где
где  причем порог U устанавливают так, чтобы частота f1 была минимально возможной при обеспечении требуемой точности ее определения, затем устанавливают коэффициент лавинного умножения М, при котором частота шумовых превышений порога становится равной fM, после чего увеличивают порог до уровня
причем порог U устанавливают так, чтобы частота f1 была минимально возможной при обеспечении требуемой точности ее определения, затем устанавливают коэффициент лавинного умножения М, при котором частота шумовых превышений порога становится равной fM, после чего увеличивают порог до уровня  и производят прием сигналов.
и производят прием сигналов.
2. Способ по п. 1, отличающийся тем, что процедуру определения параметра α выполняют однократно, вне процесса приема сигналов.
| Способ порогового обнаружения оптических сигналов | 2020 |
|
RU2755602C1 |
| Способ и устройство для регистрации импульсных оптических сигналов в условиях сильной фоновой засветки (варианты) | 2021 |
|
RU2801617C2 |
| Способ приема импульсных оптических сигналов | 2020 |
|
RU2750444C1 |
| Приёмник-преобразователь лазерного излучения | 2016 |
|
RU2639738C2 |
| WO 2017208310 A1, 07.12.2017 | |||
| US 9553216 B2, 24.01.2017. | |||
