Предлагаемое изобретение относится к выделению импульсных сигналов из флуктуационного шума, в частности, к технике приема импульсных оптических сигналов, и может быть использовано в локации, связи и других областях.
Известна техника порогового выделения импульсных сигналов на фоне флуктуационного шума [1-3].
Известны технические решения, обеспечивающие автоматическое поддержание порога срабатывания на необходимом уровне с помощью шумовой автоматической регулировки порога (ШАРП) [4-8].
Наиболее близким к предлагаемому техническому решению является способ шумовой автоматической стабилизации порога [8].
Указанный способ шумовой автоматической регулировки порога (ШАРП), заключается в сравнении шумового процесса с пороговым уровнем U, формировании стандартных выходных импульсов при превышениях порога выбросами шума, определения средней частоты f=N/T превышений порога выбросами шума путем накоплении количества N выходных импульсов за время очередного k-го цикла Т и увеличении порога на величину ΔU=Uk+λfk, где k - порядковый номер цикла, λ - коэффициент передачи схемы ШАРП, до тех пор, пока разность Δf=fk-fk-1 не станет меньше заданного значения.
Такая процедура обеспечивает постоянство частоты шумовых превышений порога при изменении параметров источника шума, например, вследствие изменений температуры и других внешних факторов. Однако указанное решение не позволяет контролировать уровень шума на входе порогового устройства, что бывает необходимо в процессе изготовления систем, включающих пороговые устройства, например, фотоприемных устройств для систем локации и связи [9]. Этот вход может быть недоступен в рабочем режиме конструктивно, или подключение к нему внешнего датчика нежелательно из-за вносимых им искажений. Кроме того, стандартные измерительные приборы [14-16] не всегда обеспечивают возможность измерения низкоуровневых шумов и требуют особых лабораторных условий для работы. Так, милливольтметр [16] реализован в лабораторном приборе габаритами (без выносного пробника), 271x191x123 мм и массой 2,57 кг, работающем в узком температурном диапазоне. Такая аппаратура непригодна для встраивания в миниатюрные фотоприемные устройства, особенно в составе портативных систем связи, локации и т.п.
Задачей изобретения является определение среднеквадратического значения флуктуационного шума на входе порогового устройства в составе аппаратуры без подключения внешних средств, в том числе в процессе проектирования, производства и обслуживания, а также применение способа для построения автономных измерителей среднеквадратического значения шума.
Указанная задача решается тем, что в известном способе шумовой автоматической регулировки порога (ШАРП), заключающемся в сравнении шумового процесса с пороговым уровнем U, формировании стандартных выходных импульсов при превышениях порога выбросами шума, определения средней частоты f=N/T превышений порога выбросами шума путем накоплении количества N выходных импульсов за время очередного k-го цикла Т и увеличении порога на величину ΔU=Uk+λfk, где k - порядковый номер цикла, λ - коэффициент передачи схемы ШАРП, до тех пор, пока разность Δf=fk-fk-1 не станет меньше заданного значения, предварительно определяют среднюю частоту f0 пересечения шумовым процессом нулевого уровня, а после установления переходного процесса определяют величину порога U и частоту f=N/T превышений порога выбросами шума в последнем цикле стабилизации, после чего вычисляют величину среднеквадратического отклонения шума по формуле 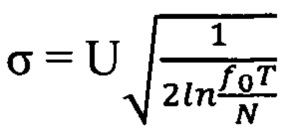 , причем,
, причем, 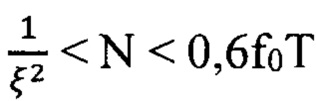 , где ξ << 1 - доверительный коэффициент, начальное значение порога U устанавливают как можно ближе к нулю, а коэффициент λ выбирают в пределах (1-3)/f0, где f0 - средняя частота пересечения шумом нулевого порога.
, где ξ << 1 - доверительный коэффициент, начальное значение порога U устанавливают как можно ближе к нулю, а коэффициент λ выбирают в пределах (1-3)/f0, где f0 - средняя частота пересечения шумом нулевого порога.
Принцип работы устройства основан на зависимости средней частоты f пересечения порога U выбросами флуктуационного шума [7, 8, 12], подчиняющегося нормальному распределению.

где  - средняя частота пересечения шумом нулевого порога;
- средняя частота пересечения шумом нулевого порога;
R(τ) - корреляционная функция шума, определяемая частотной характеристикой приемно-усилительного тракта.
Частоту f0 можно определить предварительно при пороговом уровне U=0 путем подсчета количества N0 пересечений нуля шумом за время Т' и вычисления частоты f0 по формуле f0=N0T. Этот параметр является постоянным для данного устройства и не требует проверки при каждом измерении σ.
Из соотношения (1) следует выражение для вычисления σ, используемое в настоящем изобретении.

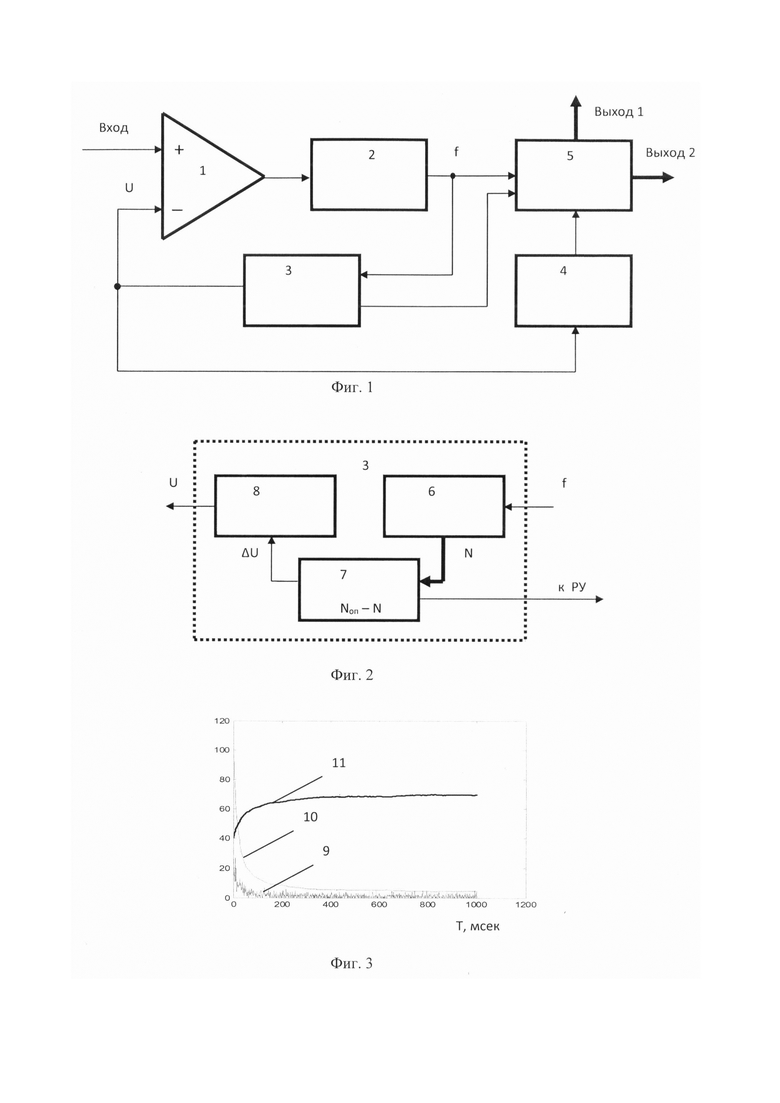
На фиг. 1 показана структура, реализующая способ.
На фиг. 2 - схема ШАРП.
На фиг. 3 - переходный процесс при аналоговом накоплении частоты f.
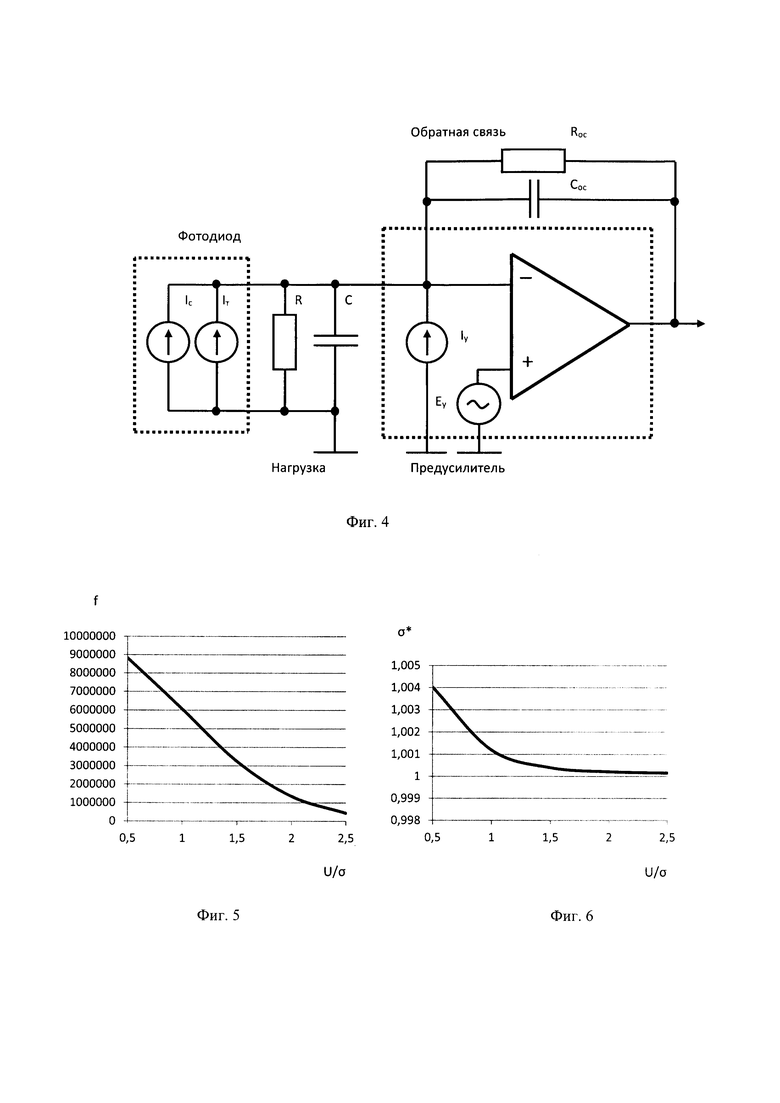
На фиг. 4 - эквивалентная схема источника шума (входного контура фотоприемного устройства с трансимпедансным предусилителем).
На фиг. 5 приведена зависимость частоты f от относительного порогового уровня U/σ.
На фиг. 6 - график, характеризующий погрешность оценки а в зависимости от U/σ.
Стабилизация порогового уровня использованным методом позволяет точно выставить среднюю частоту f превышений выбросами шума порога U, автоматически устанавливаемого путем регулировки порога с помощью схемы ШАРП [4-8]. При известных f и U с помощью выражения (2) можно определить среднеквадратическое значение шума а.
Пороговое устройство, реализующее способ (фиг. 1), включает аналоговый компаратор 1 с формирователем стандартного импульса 2, выход которого через схему ШАРП 3 замкнут на опорный вход аналогового компаратора. На сигнальный вход последнего поступает сигнал от источника шума. Аналоговый выход схемы ШАРП подключен также к аналого-цифровому преобразователю 4, связанному с решающим устройством 5, на другой вход которого от схемы ШАРП поступает цифровая информация об измеренной частоте шумовых выбросов f и сигнал об окончании переходного процесса. Схема ШАРП 3 (фиг. 2) содержит накопитель 6, связанный с блоком обработки 7, подключенным к схеме управления порогом 8 и к решающему устройству 5.
При начальном низком положении порога U средняя частота превышения порога шумовыми выбросами f близка к максимальной частоте f0. Выходные импульсы формирователя 2 кроме оконечного устройства 5 поступают на вход накопителя 6, в котором за время накопления Т формируется сигнал, пропорциональный накопленному за это время количеству N импульсов. Этот сигнал в блоке обработки 7 сравнивается с опорным значением Nоп, и разностная величина через схему управления порогом 8 увеличивает порог U на пропорциональное значение. В результате частота шумовых выбросов снижается, и описанный цикл повторяется до тех пор, пока разность Nоп - N не станет меньше установленного значения, и блок обработки останавливает процесс стабилизации. Сигнал об этом из блока обработки поступает на вход решающего устройства. Одновременно установившаяся величина U через аналого-цифровой преобразователь 4 также поступает в решающее устройство, где хранятся значения f0 и Nоп. По этим данным решающее устройство вычисляет величину о по формуле (2) и выдает результат вычисления на выход 1. На выход 2 может выдаваться другая информация, например, о задержке входного сигнала.
Процесс стабилизации иллюстрируется графиками фиг. 3. График 9 представляет собой процесс генерации выходных импульсов формирователя 2. Кривая 10 пропорциональна снижающейся частоте f. График 11 показывает ход порога U от начального значения 40 усл.ед. до установившегося уровня 70 усл.ед. Ввиду случайного характера генерации шумовых выбросов, подчиняющихся закону Пуассона [13], кривые 10 и 11 искажаются этими флуктуациями. Чем больше время усреднения Т, тем меньше отклонения порога U и средней частоты f от среднего значения и тем точнее результат определения а.
Характеристики исследуемого источника шума рассмотрены в специальной литературе [10-12]. На фиг. 4 показана эквивалентная шумовая схема приемного контура фотоприемного устройства на базе лавинного фотодиода с трансимпедансным предусилителем [10]. На входе усилителя наряду с сигнальным фототоком Iс присутствуют собственные токовые шумы фотодиода Iт и эквивалентный шумовой ток предусилителя Iу, а также шумовое напряжение предусилителя Еу. Тепловые шумы сопротивлений нагрузки R и обратной связи Roc приведены к источнику Iт. На уровень а влияет частотная характеристика приемно-усилительного тракта, в том числе паразитная входная емкость С и емкость в цепи обратной связи Сос. В связи с большим количеством перечисленных и не учтенных источников шума при проектировании приемного тракта важно знать их суммарный эффект, что делает задачу настоящего изобретения тем более актуальной, что измерение уровня шума с помощью универсальной измерительной аппаратуры не всегда представляется возможным.
На фиг. 5 представлен график зависимости (1) для f0=107 1/с. Выбор опорной частоты fоп и, соответственно, количества пересечений порога Nоп=fоп Т за время накопления Т обусловлен несколькими соображениями. С одной стороны, чем выше частота foп, тем быстрее осуществляется выход на режим стабилизации (фиг. 3). С другой стороны, при слишком высокой частоте foп, близкой к f0, повышаются требования к быстродействию аналогового компаратора 1 и формирователя стандартного импульса 2. Существующая элементная база накладывает определенные ограничения на этот выбор [17, 18]. Требования по точности измерения а определяют как выбор опорной частоты foп, так и выбор периода накопления Т. На фиг. 6 приведен график зависимости оценки σ* от параметра порог/шум U/σ, в свою очередь связанного с частотой foп (фиг. 5). Зависимость фиг. 6 получена для истинного значения σ=1 и погрешности определения величины f/f0, равной 0,1%. Видно, что точность оценки σ* увеличивается с ростом отношения порог/шум. При значении этого параметра U/σ>1 погрешность оценки σ не превышает 0,1%. При этом частота foп должна отвечать условию

Критерием выбора периода накопления Т является известное соотношение для среднеквадратического отклонения on накопленной суммы N [13]
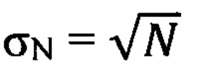
Требование σn = где ξ << 1 - доверительный коэффициент, эквивалентно условию 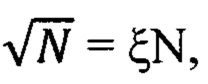 откуда
откуда

Период накопления Т определяется этими параметрами

Пример 1
f0=107 1/c; σ=1; ξ=0,003.

Из выражения (2) видно, что относительная погрешность определения U равна заданной погрешности вычисления σ. Этим определяются требования к выбору разрядности и стабильности аналого-цифрового преобразователя 4.
Каждый k-й цикл накопления начинается с опорного уровня Uk=Uk-1+λ⋅10-7fk-1, где Uk-1 - начальный порог предыдущего цикла; fk-1=Nk-1/T - частота выбросов, измеренная в предыдущем цикле; λ - коэффициент передачи схемы ШАРП.
Время выхода системы на режим заданной точности зависит от коэффициента передачи схемы ШАРП 3 и начальной установки порога U. В таблицах 1-6 приведены варианты переходного процесса при разных значениях указанных параметров при исходных данных примера 1.
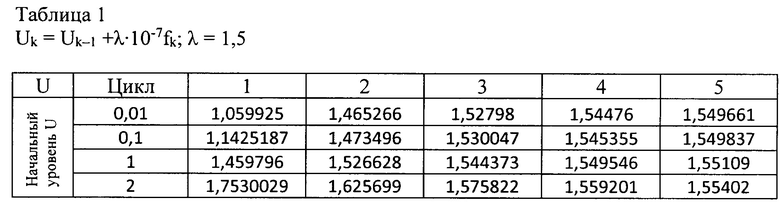
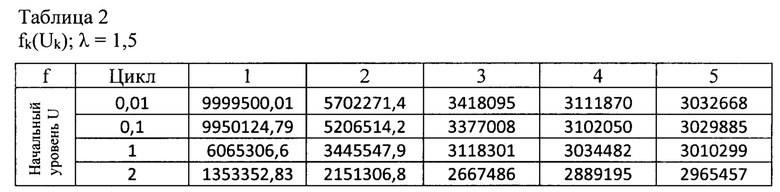
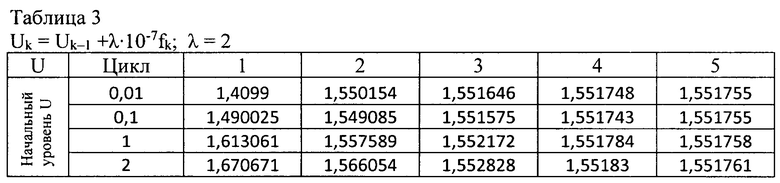
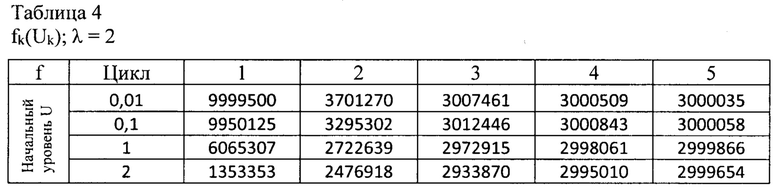
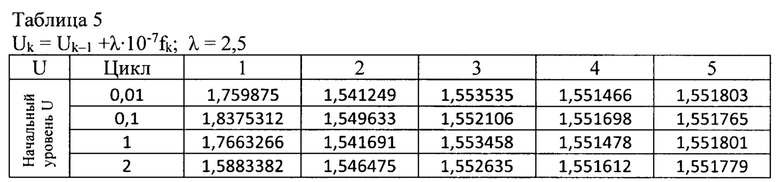
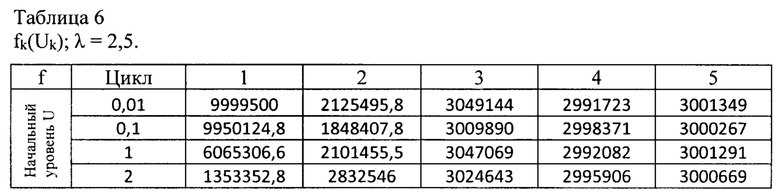
В рассмотренных вариантах ШАРП выходит на режим заданной средней частоты foп=3⋅106 1/с за 4-5 циклов накопления. Таким образом, время Тизм измерения σ составляет (4-5)Т. В условиях примера 1 это соответствует Тизм=(0,4-0,5) с.
Предлагаемое техническое решение может быть встроено в штатную структуру фотоприемного устройства и позволяет измерять интенсивность шума на выходе линейного тракта в рабочем составе устройства в процессе его работы.
Таким образом, обеспечивается минимальная погрешность (0,1-1) % измерителя о, достаточная для оперативной оценки уровня шума приемно-усилительных устройств в широком температурном диапазоне, как в автономном исполнении, так и в составе функциональных комплексов.
Аналоговые инструментальные процедуры не содержат нелинейных функциональных преобразований, для реализации которых требуются сложные устройства с надежной воспроизводимостью и стабильностью, а также сложным метрологическим обеспечением.
Устройства, реализующие способ, не требуют температурной стабилизации и обладают минимальным временем выхода на рабочий режим. При допустимой погрешности определения а в пределах (1-2) % время измерения составляет несколько миллисекунд.
Таким образом, способ обеспечивает решение поставленной задачи - оперативное определение среднеквадратического значения флуктуационного нормального шума фотоприемных устройств в процессе производства и обслуживания миниатюрной, в том числе носимой и встраиваемой аппаратуры, при несложном метрологическом обеспечении в широком эксплуатационном диапазоне.
Источники информации
1 Прием импульсных сигналов в присутствии шумовю Сборник переводных статей под ред. А.Е. Башаринова и М.С. Александрова. - М.: Гос. энергетическое издательство, 1960. - 384 с.
2 Я.Д. Ширман, В.Н. Голиков. Основы теории обнаружения радиолокационных сигналов и измерения их параметров. - Москва: Сов. радио, 1963. - 278 с.
3 Гауэр Дж. Оптические системы связи: Пер. с англ. - М: Радио и связь, 1989. - 504 с.
4 US pat. №3516751. Optical radiation pulse control receiver. 1970.
5 A.C. №320067 Устройство стабилизации средней частоты шумовых выбросов над пороговым уровнем. 1972.
6 Пат. РФ №2755601. Способ обнаружения оптических сигналов. 2021.
7 Патент РФ №2732004. Импульсное пороговое устройство с шумовой стабилизацией порога. 2019.
8 Вильнер В.Г. Проектирование пороговых устройств с шумовой стабилизацией порога. // Оптико-механическая промышленность. - 1984 г. - №5, - С. 39-41. - прототип.
9 Патент РФ №2759262. Приемное устройство лазерного дальномера.
10 Paul Horovinz, Winfield Hill. The art of electronics. Third Edition. Cambridge University Press, 2015. - p. 539.
11 И.Д. Анисимова и др. Под ред. В.И. Стафеева. Полупроводниковые фотоприемники. Ультрафиолетовый, видимый и ближний инфракрасный диапазоны спектра. - М: Радио и связь, 1984 г. - 216 с.
12 Филачев A.M., Таубкин И.И., Тришенков М.А. Твердотельная фотоэлектроника. Физические основы. Москва, Физматгиз. 2007, - с. 345.
13 Тихонов В.И. Выбросы случайных процессов. Гл. ред. физ.-мат. лит., 1970, - с. 392.
14 Насонов B.C. Справочник по радиоизмерительным приборам. - М.: Советское радио, 1976, т. 1., 234 с.
15 Ф.В. Кушнир. Электрорадиоизмерения.: Уч. пособие для вузов. - Л., Энергоатомиздат. Ленингр. отд., 1983 г. - 320 с.
16 Д. Молоков. Высокочастотный среднеквадратичный милливольтметр. Журнал «Радио». №5, 2019 г. - С. 14-21 - прототип.
17 Высокоскоростной компаратор TL714C. Texas Instruments. Datasheet 2003.
18 Высокоскоростной компаратор МАХ941/МАХ942/МАХ944. MAXIM. Datasheet 2004.
| название | год | авторы | номер документа |
|---|---|---|---|
| Среднеквадратичный милливольтметр | 2023 |
|
RU2800397C1 |
| Способ некогерентного накопления импульсных светолокационных сигналов | 2022 |
|
RU2791151C1 |
| Пороговое устройство с автоматической шумовой стабилизацией порога | 2019 |
|
RU2732003C1 |
| Пороговое устройство с шумовой стабилизацией порога | 2019 |
|
RU2721174C1 |
| Способ обнаружения импульсных оптических сигналов | 2023 |
|
RU2810708C1 |
| Способ обнаружения оптических сигналов с помощью лавинного фотодиода | 2023 |
|
RU2815330C1 |
| Способ определения дисперсии шума | 2023 |
|
RU2797829C1 |
| Способ некогерентного накопления светолокационных сигналов | 2022 |
|
RU2788940C1 |
| Импульсное пороговое устройство с шумовой стабилизацией порога | 2019 |
|
RU2732004C1 |
| Способ автоматической стабилизации частоты пересечения порогового уровня выбросами шумового процесса | 2019 |
|
RU2718856C1 |
Изобретение относится к выделению импульсных сигналов из флуктуационного шума, в частности к технике приема импульсных оптических сигналов, и может быть использовано в локации, связи и других областях. Техническим результатом изобретения является оперативное определение среднеквадратического значения флуктуационного нормального шума фотоприемных устройств в процессе производства и обслуживания миниатюрной, в том числе носимой и встраиваемой, аппаратуры, при несложном метрологическом обеспечении в широком эксплуатационном диапазоне. Способ шумовой автоматической регулировки порога (ШАРП) дополнительно заключается в том, что предварительно определяют среднюю частоту f0 пересечения шумовым процессом нулевого уровня, а после установления переходного процесса определяют величину порога U и частоту f=N/T превышений порога выбросами шума в последнем цикле стабилизации, после чего вычисляют величину среднеквадратического отклонения шума по формуле 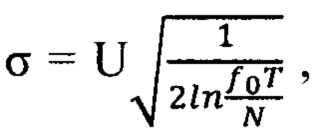 причем
причем 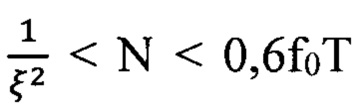 , где ξ << 1 - доверительный коэффициент, начальное значение порога U устанавливают как можно ближе к нулю, а коэффициент λ выбирают в пределах (1-3)/f0, где f0 - средняя частота пересечения шумом нулевого порога. 6 табл., 6 ил.
, где ξ << 1 - доверительный коэффициент, начальное значение порога U устанавливают как можно ближе к нулю, а коэффициент λ выбирают в пределах (1-3)/f0, где f0 - средняя частота пересечения шумом нулевого порога. 6 табл., 6 ил.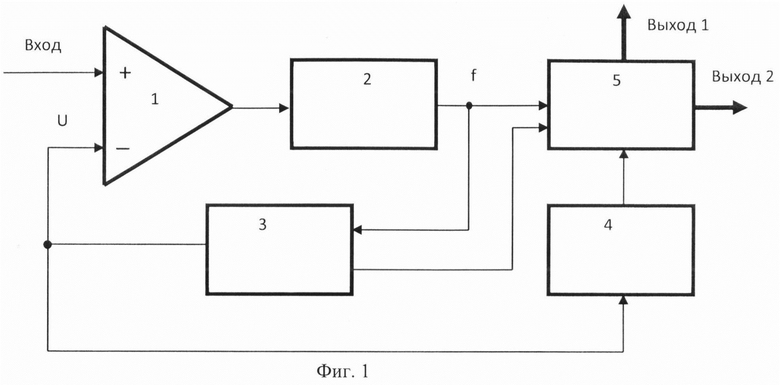
Способ шумовой автоматической регулировки порога (ШАРП), заключающийся в сравнении шумового процесса с пороговым уровнем U, формировании стандартных выходных импульсов при превышениях порога выбросами шума, определении средней частоты f=N/T превышений порога выбросами шума путем накопления количества N выходных импульсов за время очередного k-го цикла Т и увеличения порога на величину ΔU=Uk+λfk, где k - порядковый номер цикла, λ - коэффициент передачи схемы ШАРП, до тех пор, пока разность Δf=fk-fk-1 не станет меньше заданного значения, отличающийся тем, что предварительно определяют среднюю частоту f0 пересечения шумовым процессом нулевого уровня, а после установления переходного процесса определяют величину порога U и частоту f=N/T превышений порога выбросами шума в последнем цикле стабилизации, после чего вычисляют величину среднеквадратического отклонения шума по формуле 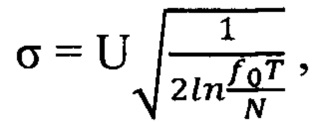 причем
причем  , где ξ << 1 - доверительный коэффициент, начальное значение порога U устанавливают как можно ближе к нулю, а коэффициент λ выбирают в пределах (1-3)/f0, где f0 - средняя частота пересечения шумом нулевого порога.
, где ξ << 1 - доверительный коэффициент, начальное значение порога U устанавливают как можно ближе к нулю, а коэффициент λ выбирают в пределах (1-3)/f0, где f0 - средняя частота пересечения шумом нулевого порога.
| Пороговое устройство с автоматической шумовой стабилизацией порога | 2019 |
|
RU2732003C1 |
| Импульсное пороговое устройство с шумовой стабилизацией порога | 2019 |
|
RU2732004C1 |
| Способ автоматической стабилизации частоты пересечения порогового уровня выбросами шумового процесса | 2019 |
|
RU2718856C1 |
| Пороговое устройство с шумовой стабилизацией порога | 2019 |
|
RU2721174C1 |
| US 3516751 A, 23.06.1970 | |||
| US 2009201426 A1, 13.08.2009 | |||
| CN 106712804 A, 24.05.2017. | |||

