Уровень техники
Сегментация является процессом извлечения анатомических конфигураций из изображений. Многие применения в медицине требуют сегментации стандартной анатомии в объемных изображениях, которые получены посредством КТ, ЯМР и других форм диагностической визуализации. Клинические врачи или другие специалисты часто используют сегментацию для планирования лечения.
Сегментация может выполняться вручную, где клинический врач рассматривает отдельные срезы изображения и вручную рисует двумерные контуры соответствующего органа на каждом срезе. Нарисованные вручную контуры затем объединяются для создания трехмерного представления соответствующего органа. В качестве альтернативы клинический врач может использовать алгоритм автоматической сегментации, который изучает срезы изображения и определяет двумерные контуры соответствующего органа без привлечения клинического врача.
Однако сегментация с использованием нарисованных вручную контуров срезов изображения отнимает много времени и обычно является точной только приблизительно от двух до трех миллиметров. При рисовании контуров вручную клиническим врачам часто необходимо изучать большое количество изображений. Кроме того, нарисованные вручную контуры могут отличаться у разных клинических врачей. К тому же автоматические алгоритмы часто не достаточно надежны для решения всех стандартных задач сегментации. Внесение изменений в результаты, полученные автоматическими алгоритмами, может быть сложным и трудным для понимания.
Сущность изобретения
Способ для сегментации органа, включающий в себя выбор модели поверхности органа, выбор множества точек на поверхности изображения органа и преобразование модели поверхности во множество точек на изображении.
Система для сегментации органа, имеющая запоминающее устройство, хранящее компиляцию моделей поверхности, которые должны быть выбраны, интерфейс пользователя, приспособленный для представления пользователю возможности выбрать модель поверхности из запоминающего устройства и выбрать множество точек на поверхности изображения органа, и процессор, преобразующий модель поверхности во множество точек на изображении.
Считываемый компьютером носитель информации, включающий в себя набор команд, исполняемых процессором. Набор команд, действующий для выбора модели поверхности органа, выбора множества точек на поверхности изображения органа и преобразования модели поверхности во множество точек на изображении.
Краткое описание чертежей
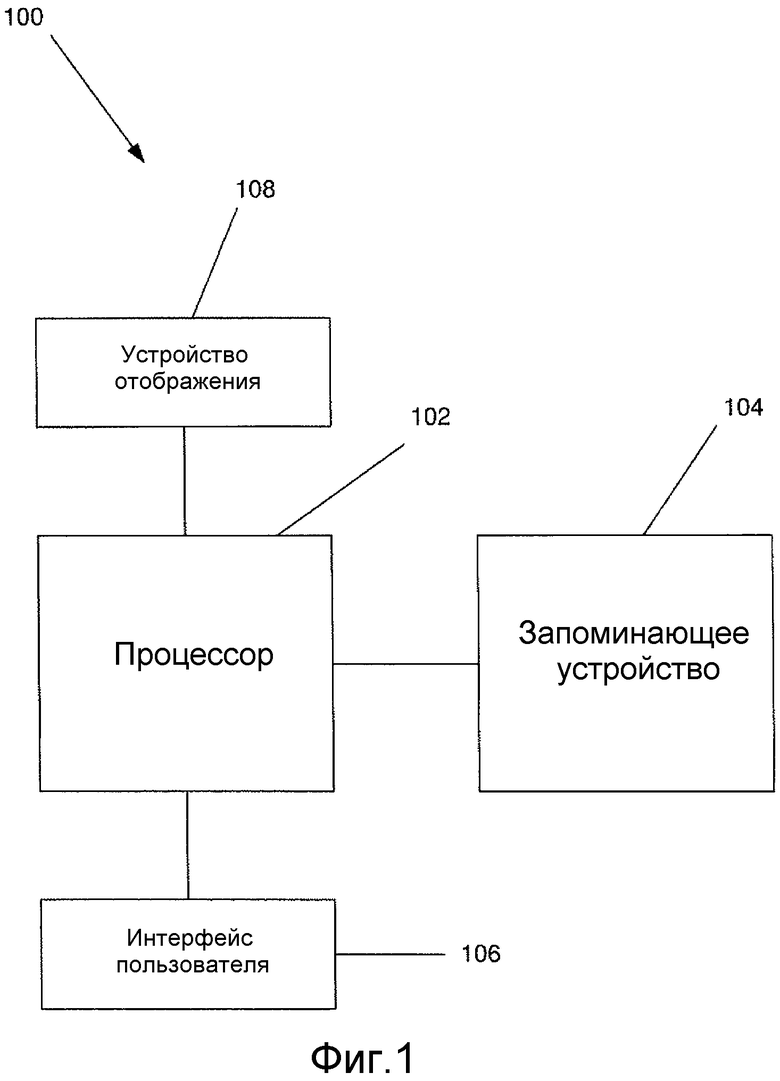
Фиг.1 показывает схематическое изображение системы в соответствии с одним примерным вариантом осуществления.
Фиг.2 показывает блок-схему последовательности операций способа для сегментации органа в соответствии с примерным вариантом осуществления.
Подробное описание
Примерные варианты осуществления, изложенные в этом описании, можно дополнительно осмысливать со ссылкой на нижеследующее описание и прилагаемые чертежи, на которых на одинаковые элементы ссылаются одинаковыми номерами ссылок. Примерные варианты осуществления относятся к системе и способу для сегментации органов. В частности, примерные варианты осуществления предусматривают сегментацию органов путем выбора ограниченного набора точек относительно поверхности органа, который показан на объемных медицинских изображениях, полученных посредством методик диагностической визуализации (например, ЯМР, КТ).
Как показано в примерном варианте осуществления на фиг.1, система 100 содержит процессор 102 и запоминающее устройство 104. Запоминающее устройство 104 является любым считываемым компьютером носителем информации, допускающим хранение компиляции моделей поверхности различных органов, которые можно сегментировать. В одном примере запоминающее устройство 104 хранит базу данных, включающую в себя компиляцию моделей поверхности различных органов. Модели поверхности могут быть типичным прототипом сегментируемого органа или средним значением многих типичных выборок органа. Пользователь выбирает одну из моделей поверхности из запоминающего устройства 104 через интерфейс 106 пользователя. Выбранная модель вместе с любыми данными, введенными пользователем через интерфейс 106 пользователя, затем обрабатывается с использованием процессора 102 и отображается на устройстве 108 отображения. Специалисты в данной области техники поймут, что система 100 является персональным компьютером, сервером или любым другим средством обработки.
Фиг.2 показывает способ 200 для сегментации органа на основе изображения органа из изображения, полученного посредством КТ, ЯМР или другого сканирования для диагностической визуализации. Этап 210 способа 200 включает в себя выбор модели поверхности органа, который должен быть сегментирован, из запоминающего устройства 104. Модель поверхности может быть типичным прототипом или средним значением нескольких типичных выборок органа. Как только выбрана модель поверхности, модель поверхности отображается на устройстве 108 отображения. Модель поверхности подходящим образом размещается на изображении и отображается на устройстве 108 отображения.
На этапе 220 пользователь выбирает множество точек на поверхности изображенного органа, сегментируемого через интерфейс 106 пользователя. Интерфейс 106 пользователя включает в себя, например, мышь для указания и нажатия на множество точек на поверхности. С поверхности изображенного органа выбирается множество точек, так что множество точек интерполируется на этапе 230 для определения точек, попадающих между выбранным множеством точек, чтобы предсказать поверхность. Например, при рисовании простого двумерного контура точки можно интерполировать, потому что они устанавливаются в некотором порядке посредством нажатий кнопок мыши или с равными интервалами времени. Точки могут устанавливаться в любом порядке и в любом переформатированном двумерном виде. Поэтому специалистам в данной области техники будет понятно, что хотя на этапе 220 может выбираться любое количество точек, чем большее количество точек выбирается, тем точнее будет сегментация. Таким образом, пользователь может продолжить выбирать точки, пока он/она не удовлетворится результатом. Специалистам в данной области техники также будет понятно, что ряд способов может использоваться для выбора множества точек. Например, там, где устройство 108 отображения является сенсорным, пользователь может выбирать множество точек путем прикосновения к экрану устройства 108 отображения. Как только выбрано множество точек на поверхности изображенного органа, модель поверхности отображается из пространства моделей в пространство изображений, так что происходит преобразование, по существу выравнивающее (согласующее) модель поверхности с изображенным органом. Сложность преобразования увеличивается с количеством выбранных точек.
Параметры для преобразования определяются с использованием итеративного алгоритма ближайших точек. Параметры могут определяться путем оптимизации, так что энергия изгиба минимизируется одновременно с интерполяцией выбранного множества точек. Например, этап 240 включает в себя выбор точек на модели поверхности, соответствующих множеству точек на поверхности изображения, выбранных на этапе 220. Соответствующие точки на модели поверхности могут быть ближайшими точками на модели поверхности от каждой из множества точек, выбранных на изображенном органе. Специалисты в данной области техники поймут, что множество точек на поверхности изображения можно интерполировать, так что можно определить также соответствующие точки на поверхности модели, которые соответствуют интерполированным точкам. На этапе 250 определяют расстояние между каждой из множества точек на поверхности изображения и каждой из соответствующих точек на модели поверхности. Специалисты в данной области техники поймут, что расстояние задается евклидовым расстоянием между каждой из множества точек на поверхности изображения и каждой из соответствующих точек на поверхности модели, которое является мерой преобразования, которое необходимо для выравнивания соответствующих точек на модели поверхности с множеством точек на поверхности изображения. В частности, расстояние определяется величиной перемещения, которое необходимо между каждой из множества точек на поверхности изображения и их соответствующими точками на модели поверхности.
На этапе 260 контролируется сходимость между множеством точек изображенного органа и их соответствующими точками на модели поверхности. Параметры преобразования анализируются для определения, необходимо ли повторение. Например, если градиент преобразования считается достаточно малым (например, ниже порогового значения), так что любое перемещение незначительно, то будет определено, что не нужно никакой дополнительной итерации. Специалисты в данной области техники поймут, что такой незначительный градиент указывал бы, что модель поверхности по существу аналогична изображенному органу. Таким образом, никакая дополнительная итерация не нужна, и сегментация завершена. Однако, если параметр преобразования такой, что градиент является существенным (например, выше порогового значения), то этап 270 включает в себя создание функции энергии от расстояния (например, энергии изгиба) и дополнительной переменной для расстояний между множеством точек на изображенном органе и соответствующими точками на модели поверхности. Специалисты в данной области техники поймут, что пороговое значение может либо устанавливаться заранее, либо выбираться и вводиться пользователем системы 100.
Градиент функции энергии, созданный на этапе 270, вычисляется на этапе 280. Например, функция энергии может быть представлена формулой E=ED+EB, где ED - сумма евклидова расстояния между каждой из множества точек поверхности изображения и преобразованием каждой из соответствующих точек модели поверхности, а EB - энергия изгиба, которая зависит от параметризации преобразования. Как только вычисляется этот градиент, каждая из соответствующих точек на модели поверхности перемещается в отрицательном направлении на вычисленный градиент на этапе 290, так что модель поверхности становится ближе к изображенному органу. Градиент энергии вычисляется относительно параметров преобразования. Специалисты в данной области техники поймут, что поскольку интерполировано множество точек и соответствующие точки определены соответственно на этапе 240, вся поверхность модели поверхности смещается в отрицательном направлении, устанавливая модель поверхности в большее выравнивание с изображенным органом. Как только модель поверхности смещена, способ 200 может вернуться к этапу 230, где определяются соответствующие точки на модели поверхности, ближайшие к выбранному множеству точек. Таким образом, специалисты в данной области техники поймут, что итеративный процесс может повторяться до тех пор, пока расстояние между каждой из выбранного множества точек и соответствующими точками на модели поверхности не будет меньше порогового значения. Как только расстояние соответствующих точек из множества точек всегда меньше порогового значения, модель поверхности считается выровненной с изображенным органом, так что сегментация завершена.
Как только сегментация завершена, специалисты в данной области техники поймут, что сегментированный орган можно сохранить в запоминающем устройстве системы 100. В частности, сегментированный орган можно сохранить в запоминающем устройстве 104 в качестве типичного прототипа. Там, где модели поверхности в запоминающем устройстве 104 являются средним значением многих типичных прототипов, сегментированный орган может включаться в и усредняться с другими типичными прототипами для определения среднего значения.
Отметим, что примерные варианты осуществления или части примерных вариантов осуществления могут быть реализованы в качестве набора команд, сохраненного на считываемом компьютером носителе информации, причем набор команд исполняется процессором.
Специалистам в данной области техники будет очевидно, что можно произвести различные модификации без отклонения от сущности или объема настоящего раскрытия изобретения. Таким образом, подразумевается, что настоящее раскрытие изобретения охватывает модификации и разновидности при условии, что они подпадают под объем прилагаемой формулы изобретения и ее эквивалентов.
Также отметим, что формула изобретения может включать в себя знаки/цифры ссылок в соответствии с Правилом 6.2(b) PCT. Однако настоящая формула изобретения не должна считаться ограниченной примерными вариантами осуществления, соответствующими знакам/цифрам ссылок.
Изобретение относится к области сегментации органов. Техническим результатом является повышение точности сегментации органа. Способ содержит этапы, на которых: выбирают (210) с помощью пользователя модель поверхности органа; выбирают (220) с помощью пользователя множество точек на поверхности изображения органа; и преобразуют (230-290) модель поверхности во множество точек на изображении, чтобы изменить контур модели поверхности для более точного соответствия контуру органа, при этом преобразование включает в себя этап, на котором интерполируют множество точек для определения промежуточных точек между выбранным множеством точек на изображении органа, и при этом интерполяция включает в себя этап, на котором определяют соответствующие промежуточные точки на модели поверхности. 2 н. и 13 з.п. ф-лы, 2 ил.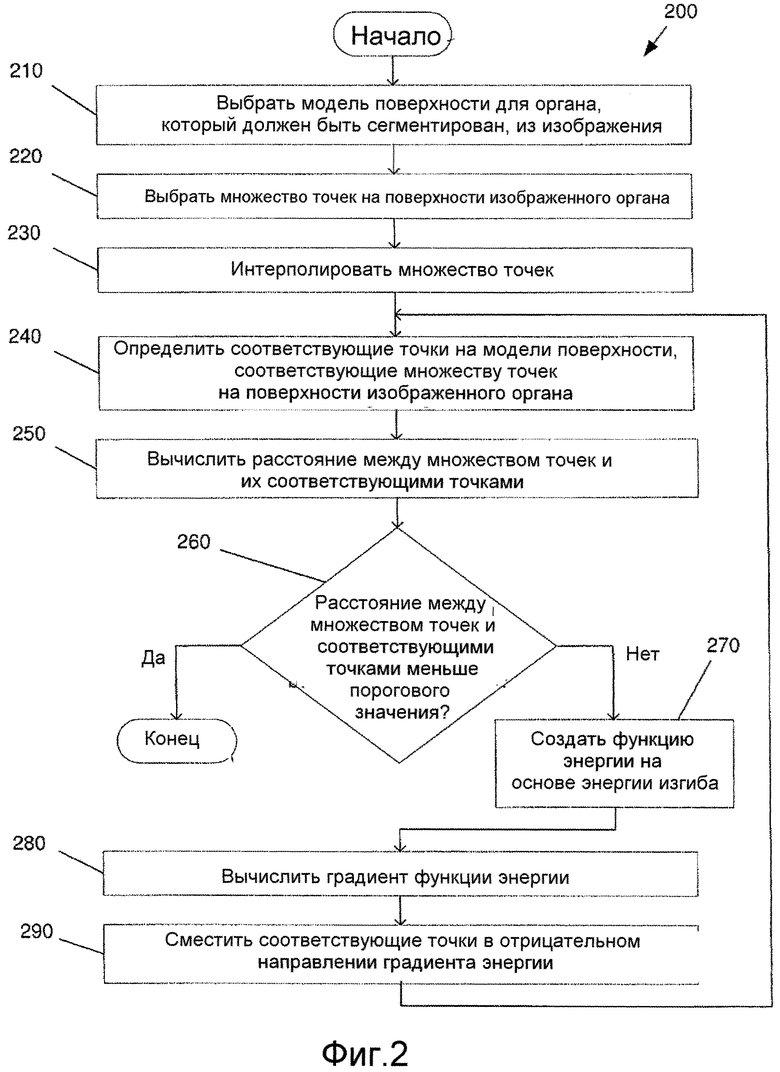
1. Способ для сегментации органа, содержащий этапы, на которых:
выбирают (210) с помощью пользователя модель поверхности органа;
выбирают (220) с помощью пользователя множество точек на поверхности изображения органа; и
преобразуют (230-290) модель поверхности во множество точек на изображении, чтобы изменить контур модели поверхности для более точного соответствия контуру органа,
при этом преобразование включает в себя этап, на котором интерполируют множество точек для определения промежуточных точек между выбранным множеством точек на изображении органа, и
при этом интерполяция включает в себя этап, на котором определяют соответствующие промежуточные точки на модели поверхности.
2. Способ по п.1, в котором интерполяция (230) предсказывает поверхность изображения органа.
3. Способ по п.1, в котором соответствующие точки являются точками на модели поверхности, которые являются ближайшими к каждой из множества точек.
4. Способ по п.1, в котором преобразование модели поверхности во множество точек на изображении включает в себя этап, на котором определяют (250) расстояние между каждой из множества точек и соответствующими точками.
5. Способ по п.4, в котором, когда каждое из расстояний меньше порогового значения (260), сегментация органа завершена.
6. Способ по п.4, дополнительно содержащий этап, на котором создают (270) функцию энергии в зависимости от расстояния, когда по меньшей мере одно из расстояний больше либо равно пороговому значению (260).
7. Способ по п.6, дополнительно содержащий этап, на котором вычисляют (280) градиент функции энергии.
8. Способ по п.7, дополнительно содержащий этап, на котором перемещают (290) соответствующие точки в отрицательном направлении градиента функции энергии.
9. Система для сегментации органа, содержащая:
запоминающее устройство (104), хранящее компиляцию моделей поверхности, которые подлежат выбору;
интерфейс (106) пользователя, приспособленный для представления пользователю возможности выбрать модель поверхности из запоминающего устройства и выбрать множество точек на поверхности изображения органа, чтобы изменить контур модели поверхности для более точного соответствия контуру органа; и
процессор (102), выбирающий соответствующие точки на модели поверхности, которые соответствуют множеству точек на поверхности изображения органа, и преобразующий модель поверхности во множество точек на изображении,
при этом преобразование включает в себя интерполяцию множества точек для определения промежуточных точек между выбранным множеством точек на изображении органа, и
при этом интерполяция включает в себя определение соответствующих промежуточных точек на модели поверхности.
10. Система по п.9, дополнительно содержащая устройство (108) отображения, отображающее по меньшей мере одно из компиляции моделей поверхности из запоминающего устройства (104), выбранной модели поверхности и изображения органа.
11. Система по п.9, в которой компиляция моделей поверхности, сохраненная в запоминающем устройстве (104), включает в себя типичные прототипы органа, который подлежит сегментации, или среднее значение типичных прототипов органа, который подлежит сегментации.
12. Система по п.9, в которой процессор (102) при интерполяции множества точек предсказывает поверхность изображения органа.
13. Система по п.9, в которой процессор (102) при преобразовании модели поверхности во множество точек на изображении определяет соответствующие точки на модели поверхности для каждой из множества точек.
14. Система по п.9, в которой процессор (102) при преобразовании модели поверхности во множество точек на изображении определяет расстояние между каждой из множества точек и соответствующими точками.
15. Система по п.9, в которой интерфейс (106) пользователя включает в себя сенсорный экран на устройстве (108) отображения или мышь, чтобы предоставить пользователю возможность выбрать множество точек.
| US20080071142 A1, 20.03.2008 | |||
| US5682886, 04.11.1997 | |||
| US6757423 B1, 29.06.2004 | |||
| СПОСОБ ФЛУОРЕСЦЕНТНОЙ ЭНДОСКОПИИ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2005 |
|
RU2290855C1 |

