Изобретение относится к области передачи дискретной (цифровой) информации и предназначено для применения в декодерах систем связи, работающих в условиях каналах с многолучевым распространением.
Одной из основных характеристик системы цифровой связи является скорость передачи, а одним из путей обеспечения высокой скорости передачи является использование многопозиционного (N-позиционного) кодирования. При этом каждый передаваемый информационный импульс содержит 2N бит информации. Недостатком такого пути в общем случае варианта кода является необходимость реализации при приеме (декодировании) сообщения N-канального коррелятора (см., например, [1]) в каждом пространственном и доплеровском канале приема (если таковые имеются), что влечет за собой техническую сложность и высокую стоимость декодера.
Указанный недостаток преодолевается при использовании N-позиционного кодирования на базе сигналов, фазоманипулированных (ФМ) m-последовательностями, следующим образом: при выбранной рабочей m-последовательности кодирование осуществляется ее циклическим временным сдвигом [2]. Использование данного варианта кодирования позволяет при декодировании сообщения ограничиться малоканальным (в каждом пространственном и доплеровском канале приема, если таковые имеются) эквивалентом коррелятора, вычисляющим циклическую свертку принимаемого сигнала с передаваемым ФМ-сигналом, прочитанным в обратном времени. (Справка: если исходный сигнал длительностью τ=М·Δ (где Δ - период дискретизации как входного сигнала, так и опорных функций всех корреляторов) имеет вид S(n)=S(tn=n·Δ) (в, так сказать, естественном времени, т.е. без инверсии времени), то сигнал, прочитанный в обратном времени (или с инверсией времени), имеет вид S(M-n·Δ); вариантами-синонимами термина «циклическая свертка» являются термины «круговая…» или «периодическая свертка»; пояснение по этому термину см. в [3, раздел 2.23]; следует также заметить, что в существенной степени синонимами являются и термины «корреляция» и «свертка»; единственным различием между ними является то, что если при вычислении корреляции оба сигнала читаются в естественном времени, то при вычислении свертки один из сигналов читается в обратном времени; в связи с этим далее используются оба этих термина. Декодирование при таком кодировании основано на измерении величины временного циклического сдвига максимума результата вычисления циклической свертки. Этот сдвиг определяется относительно момента времени, соответствующего началу результата вычисления циклической свертки.
Однако при передаче информации через многолучевой канал указанного эквивалента коррелятора, вычисляющего указанную циклическую свертку, для решения задачи декодирования становится недостаточно, поскольку при имеющих место при распространении в многолучевом канале искажениях формы сигнала принимаемые информационные импульсы с исходным передаваемым ФМ-сигналом существенно декоррелированы. Следует заметить, что указанный эффект имеет место вне зависимости от величины введенного в каждый из этих импульсов циклического временного сдвига. В таких условиях декодирование сообщения становится невозможным.
Наиболее близким по технической сущности к заявляемому объекту является устройство для декодирования, описанное в [4, рис.3] (прототип). Блок-схема прототипа представлена на фиг.2 (фигурирующие в [4, рис.3] признаки, не являющиеся, с точки зрения авторов, существенными, в настоящем описании опущены), где обозначены (принятая нумерация в обозначениях признаков прототипа соответствует сквозной нумерации аналогичных признаков на приведенной ниже блок-схеме заявляемого устройства):
- 1, 2 - первый и второй корреляторы соответственно;
- 4 - блок определения величины циклического временного сдвига, соответствующего максимуму корреляционной функции (в терминологии описания прототипа в [4] - «определитель номера i в l-м луче»);
- 5 - решающее устройство (в описании прототипа в [4, рис.3] оно отсутствует, но подразумевается);
- 6 - устройство буферной памяти;
- 7 - блок определения задержек лучей (в терминологии описания прототипа в [4] - «определитель адресов l (ИРК)»);
- 8 - накопитель номера i по (всем) l лучам.
Принцип действия прототипа состоит в следующем. Принимаемая смесь сигнала с шумом записывается в устройство буферной памяти 6 и из него поступает в первый коррелятор 1. Коррелятор 1 вычисляет корреляционную функцию между реализацией входного сигнала и собственной опорной функцией, совпадающей с синхросигналом Sc(n). Здесь и далее в тех случаях, когда опорная функция коррелятора стабильна, т.е. не обновляется во времени, эта функция хранится во входящем в состав коррелятора запоминающем устройстве; опорный вход каждого такого коррелятора на фиг.2 (а также в дальнейшем и на фиг.1) не показан. В прототипе это относится к обоим корреляторам 1 и 2.
Коррелятор 2 вычисляет циклическую (или, что то же самое, периодическую или круговую) корреляционную функцию между фрагментом принятого сигнала, поступающим от устройства буферной памяти 6, и опорной функций, равной исходному (передаваемому) информационному сигналу при его нулевом временном циклическом сдвиге 
Информация о задержках лучей из блока 7 поступает на управляющий вход устройства буферной памяти 6 как совокупность команд на последовательное считывание l фрагментов временных реализаций, каждый из которых содержит информационный импульс, пришедший по одному (от 1-го до l-го) из лучей. Каждый из этих l фрагментов последовательно поступает сигнальный на вход второго коррелятора 2, на опорный вход которого подается информационный сигнал 

Функцию определения того временного аргумента свертки, который соответствует упомянутому максимуму, выполняет блок 4 определения величины циклического временного сдвига, соответствующего максимуму корреляционной функции. В связи с тем, что максимумы результатов вычисления корреляции коррелятором 2 при обработке сигналов во всех лучах, как статистическая тенденция, совпадают, их накопление по всем лучам в блоке 8 повышает достоверность оценки искомого временного аргумента циклической свертки. Указанная оценка и есть фактически результат декодирования текущего элемента сообщения. Показанный в описании прототипа в [4, рис.3] выход «к декодеру» является формальным, поскольку для окончательного декодирования элемента сообщения после формирования оценки временного аргумента свертки осталось лишь считать соответствующий этому аргументу информационный символ из одноименной таблицы (т.е. из таблицы соответствия временных сдвигов передаваемым символам). Указанная функция выполняется опущенным в описании прототипа [4, рис.3] решающим устройством 5.
В прототипе проблема наличия количества корреляторов, равного позиционности кода N (не считая коррелятора, опорная функция которого совпадает с синхроимпульсом), в значительной степени обойдена. Однако все же в нем второй коррелятор 2 при приеме очередного информационного сигнала отрабатывает свою функцию l раз, т.е. он по потребным вычислительным ресурсам практически эквивалентен l корреляторам. Таким образом, в прототипе потребность в больших вычислительных ресурсах остается, хотя (при обычно имеющем место условии l<N или даже l<<N) и в меньшей степени, чем в прочих аналогах.
Целью заявляемого технического решения является снижение необходимых для реализации декодирования вычислительных ресурсов.
Цель достигается тем, что в устройство для декодирования дискретных сигналов, распространяющихся в многолучевом канале, содержащее первый и второй корреляторы, блок определения величины циклического временного сдвига, соответствующего максимуму циклической корреляционной функции, и решающее устройство, причем выходом устройства для декодирования является выход решающего устройства, введен третий коррелятор, включенный между выходом второго коррелятора и входом блока определения величины циклического временного сдвига, соответствующего максимуму циклической корреляционной функции, выход которого подключен ко входу решающего устройства, объединенные сигнальные входы первого и второго корреляторов являются входом устройства декодирования, а выход первого коррелятора подключен к опорному входу второго коррелятора.
Блок-схема заявляемого устройства приведена на фиг.1, где обозначены:
- 1, 2 и 3 - первый, и второй, и третий корреляторы соответственно;
- 4 - блок определения величины циклического временного сдвига, соответствующего максимуму корреляционной функции;
- 5 - решающее устройство.
Каждый из корреляторов 1…3 реализуется, например, в соответствии с [5, блок-схема на рис.5.14, с.295]. При этом сигнальным входом коррелятора является нижний на указанном рис.5.14 вход, на который подается принимаемый сигнал х(n). Опорная же функция коррелятора ступени (на указанном рис.5.14 она обозначена как h(n) хранится в его памяти, на рис.5.14 для простоты не показанной. В заявляемом устройстве опорные функции корреляторов имеют вид:
- коррелятор 1 - h1(n)=Sc(n);
- коррелятор 2 - 
- коррелятор 3 - 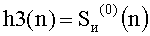
Каждый из корреляторов 1 и 2 вычисляет линейную (или апериодическую) корреляционную функцию между входным сигналом и собственной опорной функцией. При реализации каждого из этих корреляторов в спектральной области (т.е. на базе процедуры быстрой апериодической свертки; см. [3, раздел 2.23]) над опорной функцией каждого из них, дополненной по оси времени «справа» М нулевыми отсчетами, выполняется операция дискретного преобразования Фурье (ДПФ), и массив результата ДПФ (результат его комплексного сопряжения) заносится в память соответствующего коррелятора. При этом опорная функция коррелятора 1 во времени не обновляется, и поэтому операция ДПФ над ней выполняется заранее, а память, в которую заносится результат этого ДПФ, является долговременной. Опорная же функция коррелятора 2 является обновляемой, и поэтому операция ДПФ над ней выполняется по мере этого обновления, а память, в которую заносится результат этого ДПФ, является оперативной.
Над массивами отсчетов входного сигнала х(n) размером 2М также выполняется ДПФ при обновлении в смежных по времени циклах вычисления этого ДПФ на М отсчетов, далее выполняется поэлементное перемножение (т.е. перемножение одноименных отсчетов) массивов результатов ДПФ над опорной функцией и входным сигналом и обратное ДПФ (ОДПФ) от массива результатов указанного перемножения. Период обновления массива отсчетов входного сигнала при смежных по времени циклах вычисления корреляции в каждом из корреляторов первой ступени обычно выбирается равным длительности каждого из сигналов (импульсов) Sc(n) и
Корреляторы 1 и 2 могут также быть реализованы и во временной области. Вариант блок-схемы коррелятора, реализованного во временной области, приведен в [5], рис.6.18б, с.418, где (в соответствии с сегодняшним уровнем техники) вместо рециркулирующей линии задержки, хранящей массив временных отсчетов опорного сигнала при его жестком ограничении, реализуется многоразрядный регистр сдвига, хранящий те же отсчеты, представленные многоразрядными кодовыми словами.
Коррелятор 3 вычисляет циклическую корреляционную функцию между входным сигналом и собственной опорной функцией. При этом отличие этого коррелятора от корреляторов 1 и 2 состоит в следующем. Опорная функция коррелятора 3 нулевыми отсчетами не дополняется. Данная опорная функция во времени не обновляется, и поэтому, как и в случае коррелятора 1, операция ДПФ над ней выполняется заранее, а память, в которую заносится результат этого ДПФ, является долговременной. Все процедуры ДПФ в корреляторе 3 выполняются на М отсчетов входного и опорного сигналов.
Блок 4 (определения величины циклического временного сдвига, соответствующего максимуму корреляционной функции) выполняет функцию, полностью соответствующую его названию. Он содержит память, в которую записывается временная реализация, являющаяся результатом вычисления циклической корреляционной функции коррелятором 3, а также блок определения аргумента времени (индекса времени n), которому соответствует максимум указанной функции. Последний блок представляет собой программируемое устройство.
Решающее устройство 5 содержит таблицу соответствия временных циклических сдвигов информационного сигнала {i} алфавиту символов дискретной системы связи {Ai} при i=1…N. При подаче на его вход результата оценки циклического временного сдвига очередного принятого информационного сигнала в решающем устройстве 5 осуществляется считывание из указанной таблицы соответствующего этому сдвигу символа и выдача его потребителю.
Заявляемое устройство рассчитано на использование в синхронной системе связи. В такой системе на приемном конце известны моменты начала прихода каждого информационного сигнала и синхросигнала. Принципиально возможны три варианта реализации синхронизации.
а) Вариант работы передатчика и приемника в системе единого времени; при этом время распространения сигнала от передатчика до приемника известно. В этом случае в состав декодера входит таймер, выдающий сигнал синхронизации в блоки 3…5 в момент прихода очередного синхросигнала; с этим моментом жестко связаны моменты прихода информационных сигналов; при этом синхросигналы могут передаваться либо одновременно с каждым k-м информационным сигналом (при k - целое число, в частности, равное 1), либо поочередно (т.е. с разнесением во времени) с блоком k информационных сигналов (см. [6], рис.3.1 а на с.108). В момент подачи сигнала синхронизации начинается выполнение своей функции блоком 3 и далее с небольшой задержкой (необходимой для однократного вычисления циклической корреляционной функции блоком 3) выполняют свои функции блок 4 и далее (также с небольшой задержкой) блок 5. Корреляторы 1 и 2 выполняют инвариантные во времени функции (фактически этой функции линейной фильтрации), и поэтому «привязка» их работы к моментам прихода сигналов не обязательна.
б) Вариант работы с синхронизацией по моменту прихода синхросигнала. При этом осуществляется сравнение с порогом отсчетов сигнала на выходе коррелятора 2 (опорная функция которого по форме совпадает с синхросигналом), чем обеспечивается обнаружение синхросигнала, пришедшего в первом луче. Момент первого (на интервале времени приема синхросигнала) обнаружения синхросигнала (т.е. синхросигнала, пришедшего в первом луче) полностью аналогичен варианту синхронизации а) выдается синхроимпульс в блоки 3…5.
в) Вариант работы с синхронизацией по моменту прихода предыдущего информационного сигнала [4]. При этом отличие этого варианта синхронизации от варианта б) состоит лишь в том, что роль синхросигнала выполняет предыдущий информационный сигнал.
Указанные средства синхронизации в состав заявляемого объекта не включены, поскольку подавляющее большинство систем цифровой (дискретной) связи являются синхронными, и поэтому специалисту для воспроизведения заявляемого объекта конкретизации средств синхронизации не требуется.
Следует отметить, что по выполняемым функциям корреляторам 1 и 2 прототипа в заявляемом устройстве соответствуют корреляторы 1 и 3.
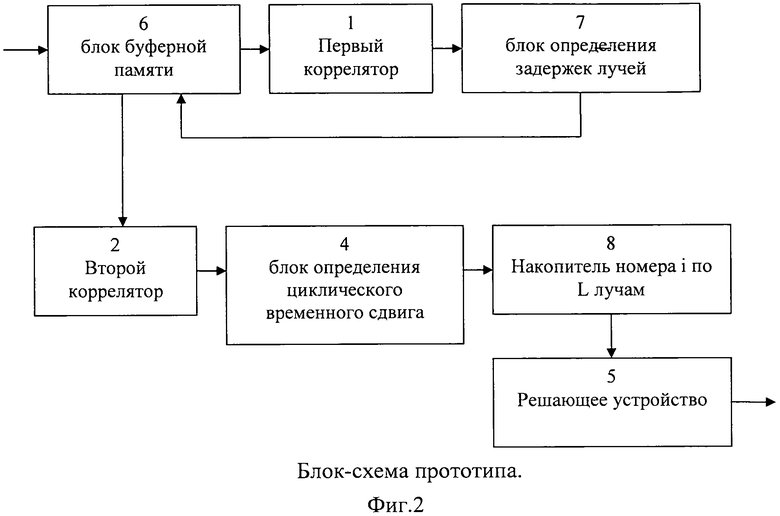
Процесс работы заявляемого устройства в динамике при передаче синхросигналов поочередно с блоком k информационных сигналов (см. [6], рис.3.1 на с.108) иллюстрируется фиг.3. На фиг.3а) условно показана совокупность временных реализаций огибающей синхросигнала, пришедших в точку приема по 3 лучам с различными амплитудами и временами распространения, при этом сигнал в первом луче приходит в момент t1; на фиг.3б) показана сформированная по указанному синхросигналу на выходе коррелятора 1 оценка ИРК (точнее, модуль этой оценки; каждый отсчет ИРК характеризуется еще и фазой), эта оценка формируется на интервале времени t2…t2+Tирк, где Tирк - длительность ИРК; на фиг.3в) условно показана совокупность временных реализаций огибающей информационного сигнала, пришедших в точку приема по тем же 3 лучам, что и синхросигнал, причем этот информационный сигнал пришел в точку приема в момент времени t3; на фиг.3г) показан результат отработки свой функции коррелятором 2, что привело к компенсации временного затягивания сигнала в многолучевом канале, т.е. к формированию однолучевого информационного сигнала, интенсивность которого равна сумме интенсивностей информационного сигнала, пришедшего по каждому из трех лучей, этот однолучевой сигнал сформирован на интервале времени t4…t4+τ (τ - длительность каждого информационного и синхроимпульса); на фиг.3д показан результат вычисления циклической корреляции блоком 3, представляющий собой пик при временном сдвиге, определяемом переданным символом i. Далее величина этого сдвига определяется блоком 4, после чего она преобразуется блоком 5 в соответствующий принятому информационному сигналу символ.
Следует заметить, что результатом отработки своей функции коррелятором 2 наряду с показанным на фиг.3г (основным) импульсом формируются и не показанные на фиг.3г побочные импульсы, однако уровень каждого из них много меньше уровня основного импульса, и отработка своей функции коррелятором 3 осуществляется именно над этим (показанным на фиг.3г) импульсом, что обеспечено синхронизацией работы устройства декодирования. Таким образом, в плане синхронизации принципиально важно, что блок 3 выполняет свою функцию над временной реализацией, сформированной на выходе блока 2 именно в интервале времени t1…t4+τ.
При работе системы связи в режиме единого времени все моменты времени t1…t4 (заметим, что t2=t1+τ), а также временные параметры τ и Тирк (его прогнозируемое значение) в точке приема заранее известны. При синхронизации по моменту прихода синхросигнала заранее известны такие временные параметры, как разность t3-t1, а также τ и Тирк; момент же времени t2 определяется путем обнаружения синхросигнала, пришедшего в первом луче, и измерения времени его прихода (как отмечено выше, технические средства, реализующие эту функцию, являются стандартными и выходят за рамки заявляемого устройства). При синхронизации по моменту прихода предыдущего информационного сигнала роль синхросигнала в определении момента t2 играет этот информационный сигнал (работа системы связи в данном варианте синхронизации начинается с однократной передачи синхросигнала и начального вхождения в синхронизм по этому синхросигналу, после чего синхронизм поддерживается путем оценивания моментов прихода в первом луче информационных сигналов).
В прототипе вырабатывалась оценка временного сдвига кода по каждому из l лучей в отдельности, и далее эти оценки усреднялись (накапливались). В связи с этим в нем коррелятор 2 при приеме каждого информационного импульса выполнял свою функцию l раз. В заявляемом же устройстве реализуется функция квазикогерентного накопления сигналов (это накопление не является в полной мере когерентным, поскольку коррелятором 2 формируется оценка ИРК с конечной точностью) по всем лучам. При этом многолучевой сигнал трансформируется в однолучевой, характеризуемый суммарной (т.е. просуммированной по всем лучам) интенсивностью, что обеспечивает возможность вычисления циклической корреляционной функции на интервале времени приема одного информационного сигнала однократно. Таким образом, технический эффект экономии необходимых вычислительных ресурсов устройства декодирования в заявляемом устройстве достигается.
Литература.
1. Устройство передачи-приема многопозиционных сигналов. Авт. свид. СССР №649164.
2. Kwon H.M., Birdsal T.G. Digital Waveform Codings For Ocean Acoustic Telemetry. IEEE Journal of Oceanic Engineering, vol.16, №1, January 1991. P.56-65.
3. Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. M.: Мир. 1978. 848 с, ил.
4. В.З. Кранц, В.В. Сечин. Использование информационных символов для синхронизации системы связи со сложными сигналами // Гидроакустика. Вып. №15, 2012. С.36-41.
5. Применение цифровой обработки сигналов. Под ред. Э. Оппенгейма. M.: Мир, 1980. 552 с., ил.
6. Кловский Д.Д. Передача дискретных сообщений по радиоканалам. M.: Связь. 1969.
Изобретение относится к области передачи дискретной информации или передачи данных и предназначено для применения в устройствах приема (декодирования) сигналов в системах связи, работающих в каналах с многолучевым распространением. Техническим результатом является снижение вычислительных затрат. Устройство содержит три коррелятора, блок определения величины циклического временного сдвига, соответствующего максимуму циклической корреляционной функции, и решающее устройство. 3 ил.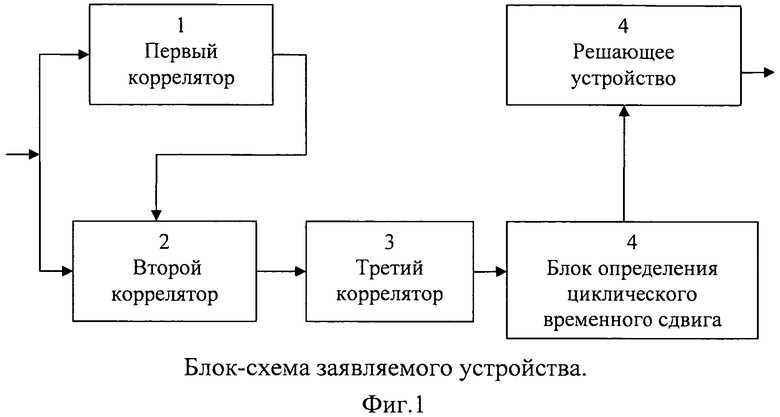
Устройство для декодирования дискретных сигналов, распространяющихся в многолучевом канале, содержащее первый и второй корреляторы, блок определения величины циклического временного сдвига, соответствующего максимуму циклической корреляционной функции, и решающее устройство, причем выходом устройства для декодирования является выход решающего устройства, отличающееся тем, что введен третий коррелятор, включенный между выходом второго коррелятора и входом блока определения величины циклического временного сдвига, соответствующего максимуму циклической корреляционной функции, выход которого подключен ко входу решающего устройства, объединенные сигнальные входы первого и второго корреляторов являются входом устройства декодирования, а выход первого коррелятора подключен к опорному входу второго коррелятора.
| КРАНЦ В.З | |||
| и др | |||
| "ИСПОЛЬЗОВАНИЕ ИНФОРМАЦИОННЫХ СИМВОЛОВ ДЛЯ СИНХРОНИЗАЦИИ СИСТЕМЫ СВЯЗИ СО СЛОЖНЫМИ СИГНАЛАМИ" | |||
| В: "ГИДРОАКУСТИКА", 2012, вып | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Коридорная многокамерная вагонеточная углевыжигательная печь | 1921 |
|
SU36A1 |
| УСТРОЙСТВО ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ В МНОГОЛУЧЕВОМ КАНАЛЕ СВЯЗИ | 1992 |
|
RU2048701C1 |
| СПОСОБ СОВМЕСТНОЙ ДЕМОДУЛЯЦИИ-ДЕКОДИРОВАНИЯ ДВОИЧНЫХ СИГНАЛОВ МОДУЛЯЦИИ С НЕПРЕРЫВНОЙ ФАЗОЙ В СИСТЕМАХ СВЯЗИ СО СВЕРТОЧНЫМ КОДИРОВАНИЕМ И СИСТЕМОЙ ПЕРЕМЕЖЕНИЯ-ДЕПЕРЕМЕЖЕНИЯ СИМВОЛОВ ДЛЯ МНОГОЛУЧЕВЫХ РАДИОКАНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2163054C2 |
| US 6130923 A, 10.10.2000 | |||
| US 2010205510 A1, 12.08.2010 | |||

