Изобретение относится к области авиационной техники, а именно к системам управления, повышающим безопасность полета самолета-амфибии (СА) или гидросамолета при глиссировании.
Известно «Устройство для автоматического парирования крена летательного аппарата» (Авторское свидетельство СССР №619076, В64С 13/16) [1], которое при отказе двигателя в полете выполняет выпуск интерцептора на консоли крыла со стороны работающего двигателя. При этом автоматический контроль крена на работающий двигатель, создавшегося в результате выпуска интерцепторов, не предусмотрен.
Известен, автомат парирования отказа двигателя (АПОД), который позволяет существенно повысить безопасность полета самолета при отказе двигателя, особенно на этапах взлета и ухода на второй круг, когда тяга двигателей максимальна, за счет парирования большей части возмущающего момента рыскания автоматическим отклонением руля направления (РН) («Системы дистанционного управления магистральных самолетов» Б.С. Алешин, С.Г. Баженов, Ю.И. Диденко, Ю.Ф. Шелюхин. - М.: Наука, 2013 г.- 292 с., с. 150-153) [2]. Компенсация меньшего по величине момента тангажа и установка потребного крена возлагается на пилота. После создания необходимого угла крена на работающий двигатель АПОД может обеспечить полную компенсацию момента рыскания от асимметричной тяги. Применение АПОД существенно снижает нагрузку пилота при пилотировании самолета в условиях отказа двигателя и приводит к повышению точности управления траекторией самолета. АПОД, в том или ином виде, используется в системах дистанционного управления (СДУ) практически на всех современных отечественных и зарубежных магистральных самолетах.
Особенностью существующих АПОД является использование в алгоритме работы косвенной информации о силе тяги двигателей, поступающей от системы управления двигателем. Такой информацией, например для газотурбинных двигателей, могут служить обороты турбины или коэффициент повышения давления воздуха в компрессоре. Существенное падение значений этого параметра на одном двигателе в сравнении со значениями на другом сигнализирует об отказе.
Автомат парирования отказа двигателя является наиболее близким техническим решением и выбран в качестве прототипа изобретения.
Психофизиологическая нагрузка на летчиков при выполнении операций на водной поверхности, особенно при заборе воды с глиссирования, значительно превышает нагрузку на других этапах полета. Визуальные и акселерационные признаки бокового увода после отказа двигателя проявляются значительно хуже, чем, скажем, при взлете с сухопутной взлетно-посадочной полосы (ВПП) (не обозначены ось и кромки ВПП, перегрузки от движения лодки по волне маскируют перегрузку от бокового увода). При этом, в отличие от опирающегося при взлете на колеса сухопутного самолета, опора гидросамолета, выполненного по наиболее распространенной схеме летающей лодки, «одноточечная», из-за чего при попытке парирования бокового увода летчик может допустить неблагоприятный крен в сторону отказавшего двигателя. С другой стороны, в отличие от парирования отказа двигателя в воздухе, при глиссировании из-за опасности касания воды консолью крыла рискованно требовать в летной инструкции, чтобы летчик установил крен в сторону работающего двигателя вручную.
Из-за недостатков визуальной и акселерационной информации при движении по водной поверхности признаки бокового увода проявляются только при значительных отклонениях от траектории, намеченной при заходе на посадку (на забор воды) или в начале разбега перед взлетом. Поэтому и без отказа возможны существенные отклонения линии пути самолета от условной центральной линии гидроаэродрома. Тогда при отказе двигателя, даже в том случае, когда летчику самостоятельно или с поддержкой автоматических средств удастся грамотными действиями минимизировать связанный с отказом боковой увод, возможен опасный, в случае ограниченного водоема, выход за боковую границу гидроаэродрома. Маневры гидросамолета по курсу при глиссировании обычно не требуются, поэтому предлагаемый способ улучшения путевой управляемости содержит в себе функцию автоматического выдерживания заданного (установившегося на момент включения режима или скорректированного летчиком) угла рыскания. С другой стороны, путевая управляемость гидросамолета на водной поверхности снижена в сравнении с движением самолета по сухопутной ВПП, где путевое управление помимо аэродинамических рулей обеспечивается управляемым носовым колесом шасси. Поэтому предлагаемый способ улучшения путевой управляемости предусматривает создание «помогающего» крена в сторону отклонения педали независимо от наличия отказа двигателя.
С точки зрения решаемой предлагаемым изобретением проблемы парирования боковых уводов при глиссировании гидросамолета недостатками известных способов являются:
- применение их для автоматического парирования отказа двигателя только при полете в воздухе;
- парирование отказа завязано на косвенную информацию об отказе двигателя, т.е. возможно ложное срабатывание;
- создание крена на работающий двигатель в АПОД [2] возлагается на летчика, а устройство [1] создает неконтролируемый крен, в то время, как при глиссировании крен должен быть жестко ограничен до значений, исключающих касание воды консолью крыла, что трудно обеспечить ручным управлением в условиях тряски, сопровождающей движение по взволнованной поверхности;
- в известных устройствах предусмотрена помощь летчику только в отказной ситуации, а при глиссировании целесообразно повысить путевую управляемость и в обычных условиях, т.к. эффективность аэродинамического РН снижена из-за невысокого уровня воздушного скоростного напора.
В случае отказа двигателя в воздухе величина минимальной скорости, при которой аэродинамические органы управления обеспечивают возможность прямолинейного полета, т.е. позволяют уравновесить разворачивающий момент от асимметричной тяги, сильно зависит от крена самолета (Harry Horlings "Controlling Multi-Engine Airplanes after Engine Failure. Limitations Imposed by the Size of the Vertical Tail", http://www.avioconsult.com/downloads.htm) (фиг. 1).
В руководствах по летной эксплуатации для сохранения путевой управляемости при полете с отказавшим двигателем обычно рекомендуется поддерживать крен 2÷3° в сторону работающего двигателя. При разбеге самолета с обычной трехколесной схемой шасси по сухопутной ВПП управляемость по крену ограничена реакциями от колес, поэтому влияние крена на величину минимальной эволютивной скорости на земле обычно не рассматривается. Однако при разбеге гидросамолета, выполненного по схеме летающей лодки, на предвзлетных скоростях управляемость по крену практически такая же, как в воздухе, если величина крена не превышает значений, приводящих к касанию консолью крыла. Путем математического моделирования исследовано влияние на величину бокового увода знака и величины крена, создаваемого при парировании отказа двигателя на взлете с воды (Сб. докладов 10-й научной конференции по гидроавиации "Геленджик-2014". - М., изд-во ЦАГИ, 2014). Как видно, на фиг. 2, при прочих равных условиях «правильный» (в сторону работающего двигателя) крен 2° уменьшает величину бокового увода в сравнении со случаем, где крен был равен 0, приблизительно в 2 раза.
Техническим результатом изобретения является повышение безопасности полета, за счет улучшения путевой управляемости (УПУ) самолета-амфибии (гидросамолета) при глиссировании, включая парирование отказа критического маршевого двигателя, работающего в момент отказа на максимальном режиме. Предлагаемый способ улучшения путевой управляемости снижает психофизиологическую нагрузку на пилотов при глиссировании самолета-амфибии (гидросамолета), особенно высокую при заборе воды, и обеспечивает повышение безопасности полетов за счет надежного парирования боковых уводов в случае продолженного взлета с отказом критического двигателя.
Технический результат достигается тем, что в предлагаемом способе улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании, включая парирование бокового увода в случае отказа двигателя на разбеге по воде, на рулевые приводы аэродинамических органов управления самолетом параллельно с управляющими сигналами с постов управления кабины экипажа поступают сигналы, которые формируются с учетом сигналов от датчиков параметров движения самолета вычислителем системы дистанционного управления по заданному алгоритму. При движении СА (гидросамолета) по водной поверхности используют автоматическую переключаемую стабилизацию заданных значений углов крена и рыскания, величину которых переназначают в зависимости от величины и знака отклонений органа путевого управления (ОПУ). При отклонении ОПУ ниже порогового значения стабилизируют нулевое значение крена. Если отклонение ОПУ превысило пороговое значение, меняют заданный для стабилизации крен на оптимальное значение в сторону отклонения ОПУ. После возвращения ОПУ в положение около нейтрального возобновляют стабилизацию нулевого значения крена. При отсутствии отклонения педалей летчиком стабилизируют имеющееся значение угла рыскания. При отклонении педалей выше заданного порогового значения, стабилизацию угла рыскания прекращают, а после возвращения педалей в нейтральное положение возобновляют стабилизацию установившегося перед возвращением педалей в нейтраль значения угла рыскания.
Способ реализуется в предлагаемом устройстве.
Устройство для улучшения путевой управляемости СА (гидросамолета) при глиссировании, содержит датчик положения педалей, датчик положения РН, датчики параметров движения самолета-амфибии (гидросамолета) и вычислитель для формирования сигналов автоматического отклонения аэродинамических рулей путевого и поперечного управления. Устройство снабжено датчиками касания воды и путевой скорости, используемыми логическим блоком «Ключ «глиссирование» для формирования ключа «ГЛИСС», который подается на переключатели. Переключатели подключают к СДУ сигналы на отклонение аэродинамических рулей поперечного управления, формируемые стабилизатором угла крена с учетом параметров движения самолета от датчиков по значению заданного угла из селектора. Выбор одного из предустановленных значений заданного угла крена определяется подключенным на вход селектора сигналом от датчика отклонения РН. При этом, ключ «ГЛИСС» подается на вход логического блока и формирует совместно с сигналом отклонения педалей летчиком ключ «НЕЙТРАЛЬ ПЕДАЛЕЙ», прекращающий при отсутствии отклонения педалей обновление значениями текущего угла рыскания величины заданного угла рыскания в запоминающем устройстве (ЗУ) и подключает к СДУ самолета-амфибии (гидросамолета) сигнал на отклонение РН, формируемый устройством в стабилизаторе угла рыскания по сигналам заданного угла рыскания из ЗУ и с учетом параметров движения самолета от датчиков.
Таким образом, сопоставительный анализ заявляемого изобретения с известными техническими решениями позволяет сделать вывод о соответствии критериям новизна, изобретательский уровень и промышленная применимость.
Предлагаемое изобретение поясняется описанием, графиками и схемами:
- на фиг. 1 показан график влияния угла крена на величину минимальной эволютивной скорости VМСА в полете;
- на фиг. 2 показана запись параметров при математическом моделировании отказа левого двигателя на взлете с воды с различными значениями угла крена, выдерживаемого при парировании бокового увода (γ=-2°, γ=0 и γ=+2°);
- на фиг. 3 показана схема устройства для УПУ СА (гидросамолета) при глиссировании, когда в качестве входного сигнала для селектора крена используется отклонение руля направления;
- на фиг. 4 показана схема устройства для УПУ СА (гидросамолета) при глиссировании, когда в качестве входного сигнала для селектора крена используется отклонение педалей;
- на фиг. 5 показаны записи парирования бокового увода (Z, м) после отказа правого двигателя в процессе забора воды без применения устройства УПУ (эксперименты на пилотажном стенде самолета-амфибии Бе-200);
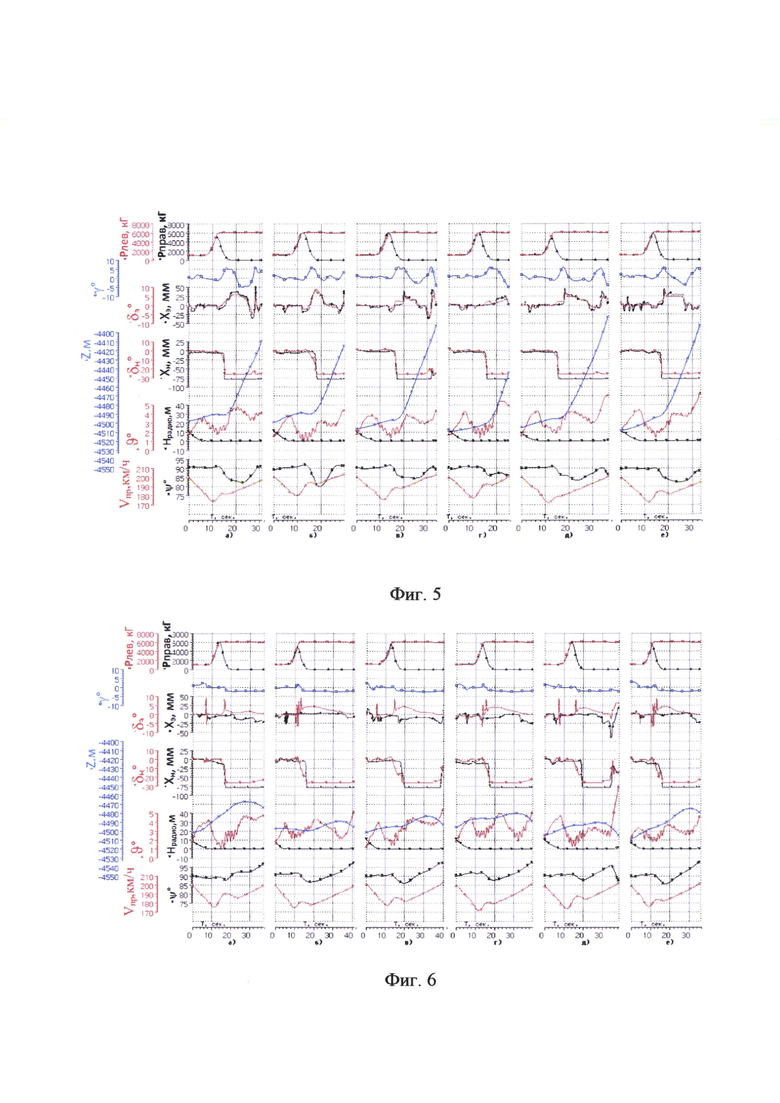
- на фиг. 6 показаны записи парирования бокового увода (Z, м) после отказа правого двигателя в процессе забора воды с применением устройства УПУ (эксперименты на пилотажном стенде самолета-амфибии Бе-200).
Вычислитель системы дистанционного управления дополнен устройством для улучшения путевой управляемости (УПУ), показанным на фиг. 3 и фиг. 4. В логическом блоке «Ключ «глиссирование» 1 по величине путевой скорости Vпут и сигналу от датчика «касание воды» определяется нахождение самолета в режиме глиссирования. Выходом логического блока «Ключ «глиссирование» 1 является ключ «ГЛИСС». При отсутствии ключа «ГЛИСС» все выходные сигналы устройства, которые представляют собой добавки отклонений аэродинамических рулей δнУПУглис, δэУПУглис и δинтУПУглис в формируемые СДУ сигналы на отклонение РН, элеронов и интерцепторов, при помощи переключателей П2, ПЗ и П4 отключаются (обнуляются), а ЗУ 2 по ключу «НЕЙТРАЛЬ ПЕДАЛЕЙ» от логического блока 3 подключается на постоянное обновление значением текущего угла рыскания ψ.
В режиме глиссирования ключ «ГЛИСС» переключателями ПЗ и П4 подключает к СДУ выходы устройства δэУПУглис и δинтУПУглис, а также, если нет отклонений педалей (|хн|≤а) снимается ключ «НЕЙТРАЛЬ ПЕДАЛЕЙ» от логического блока 3, в результате чего переключателем П2 подключается выход δнУПУглис, а переключателем П1 отключается обновление содержимого ЗУ 2. Величина угла рыскания ψ, попавшая в ЗУ 2 к моменту отключения обновления, становится значением заданного угла рыскания ψзадан для стабилизатора угла рыскания Wψ 4, в который также передаются значения текущего угла рыскания ψ, угловой скорости ωу и других параметров движения самолета от датчиков 5. При отклонении педалей больше порогового значения «а» (|хн|>а) обнуляется ключ «НЕЙТРАЛЬ ПЕДАЛЕЙ» из логического блока 3, из-за чего выход стабилизатора угла рыскания Wψ 4 обнуляется, а ЗУ 2 подключается на обновление текущими значениями угла рыскания ψ.
Заданное значение угла крена γзадан для стабилизатора угла крена Wγ 6 определяется селектором 7 в зависимости от величины и знака сигнала от датчика отклонения РН δн (фиг. 3) или педалей хн (фиг. 4). При незначительных отклонениях РН δн или педалей хи (|δн|≤d или |хн|≤а) заданный угол крена γзадан, равен 0, а при |δн|>d или |хн|>а заданный угол крена γзадан равен b° влево или вправо в зависимости от знака сигнала из датчика отклонения РН δн или педалей хн.
Величина заданного угла крена γзадан устанавливается и стабилизируется стабилизатором угла крена Wγ 6, в который также передаются значения текущего угла крена γ, угловой скорости ωх и других параметров движения самолета из датчиков 5.
Эффективность предлагаемого алгоритма устройства заключается в том, что
- уменьшается потребный объем внимания летчика, уделяемого выдерживанию заданного курса и нулевого крена;
- парируется тенденция к уходу самолета с курса сразу после отказа двигателя;
- повышается эффективность действий летчика по корректированию курса для возвращения к оси гидроаэродрома, чем обеспечивается нахождение самолета в пределах заявленной ширины гидроаэродрома;
- не создаются препятствия действиям летчика по изменению угла рыскания в процессе возвращения траектории к осевой линии гидроаэродрома.
Эффективность предложенных устройств исследована в экспериментах на пилотажном стенде. Процессы парирования отказа двигателя при заборе воды с глиссирования до и после применения устройства показаны на фиг. 5 и 6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА САМОЛЕТА-АМФИБИИ ПРИ ДВИЖЕНИИ ПО ВОДЕ В РЕЖИМЕ ГЛИССИРОВАНИЯ | 2004 |
|
RU2268157C1 |
| САМОЛЕТ-АМФИБИЯ (ГИДРОСАМОЛЕТ) С РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ | 2016 |
|
RU2641359C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРЕДОТВРАЩЕНИЯ ВЫХОДА УГЛА ТАНГАЖА САМОЛЕТА ЗА ПРЕДЕЛЫ ЭКСПЛУАТАЦИОННОГО ДИАПАЗОНА | 2011 |
|
RU2490168C1 |
| СПОСОБ И УСТРОЙСТВО ВИЗУАЛЬНОЙ ИНДИКАЦИИ СКОРОСТИ ПРОТИВОПОЖАРНОГО САМОЛЁТА-АМФИБИИ ПРИ ЗАБОРЕ ВОДЫ НА ГЛИССИРОВАНИИ ПО ВОДНОЙ ПОВЕРХНОСТИ | 2013 |
|
RU2541613C2 |
| САМОЛЕТ-АМФИБИЯ | 2011 |
|
RU2471677C1 |
| СИСТЕМА ЗАПОЛНЕНИЯ ВОДОЙ БАКОВ-ОТСЕКОВ ГИДРОСАМОЛЕТА НА ГЛИССИРОВАНИИ | 2016 |
|
RU2615077C1 |
| Транспортный самолет-амфибия | 2020 |
|
RU2732523C1 |
| ПОЛУАВТОМАТИЧЕСКАЯ СИСТЕМА ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2006 |
|
RU2316450C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ - АМФИБИЯ | 2017 |
|
RU2661379C1 |
| ГИДРОДИНАМИЧЕСКИЙ ТОРМОЗ | 2014 |
|
RU2570183C1 |



Группа изобретений относится к способу и устройству улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании. Для улучшения путевой управляемости на рулевые приводы аэродинамических органов управления самолетом параллельно с управляющими сигналами с постов управления кабины экипажа поступают сигналы, формируемые с учетом сигналов от датчиков параметров движения самолета вычислителем системы дистанционного управления по заданному алгоритму, используют автоматическую переключаемую стабилизацию заданных значений углов крена и рыскания определенным образом. Устройство содержит датчик положения педалей, датчик положения руля направления, датчики параметров движения, датчики касания воды и путевой скорости, вычислитель. Обеспечивается увеличение безопасности полета самолета-амфибии (гидросамолета) при глиссировании. 2 н. и 2 з.п. ф-лы, 6 ил.
1. Способ улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании, включая парирование бокового увода в случае отказа двигателя на разбеге по воде, заключающийся в том, что на рулевые приводы аэродинамических органов управления самолетом параллельно с управляющими сигналами с постов управления кабины экипажа поступают сигналы, формируемые с учетом сигналов от датчиков параметров движения самолета вычислителем системы дистанционного управления по заданному алгоритму, отличающийся тем, что при движении самолета-амфибии (гидросамолета) по водной поверхности используют автоматическую переключаемую стабилизацию заданных значений углов крена и рыскания, величину которых переназначают в зависимости от величины и знака отклонений органа путевого управления, при этом при отклонении органа путевого управления ниже порогового значения стабилизируют нулевое значение крена, в случае отклонения органа путевого управления превышающего пороговое значение, меняют заданный для стабилизации крен на оптимальное значение в сторону отклонения органа путевого управления, после возвращения органа путевого управления в положение около нейтрального возобновляют стабилизацию нулевого значения крена, при этом в отсутствии отклонения педалей летчиком стабилизируют имеющееся значение угла рыскания, при отклонении педалей выше заданного порогового значения стабилизацию утла рыскания прекращают, а после возвращения педалей в нейтральное положение возобновляют стабилизацию установившегося перед возвращением педалей в нейтраль значения угла рыскания.
2. Способ по п. 1, отличающийся тем, что в качестве отклонений органа путевого управления принимают отклонение руля направления.
3. Способ по п. 1, отличающийся тем, что в качестве отклонений органа путевого управления принимают отклонение педалей с поста управления в кабине летчиков.
4. Устройство для улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании, содержащее датчик положения педалей, датчик положения руля направления, датчики параметров движения самолета-амфибии (гидросамолета) и вычислитель для формирования сигналов автоматического отклонения аэродинамических рулей путевого и поперечного управления, отличающееся тем, что устройство снабжено датчиками касания воды и путевой скорости, используемыми логическим блоком «Ключ «глиссирование» для формирования ключа «ГЛИСС», подаваемого на переключатели, подключающие к системе дистанционного управления сигналы на отклонение аэродинамических рулей поперечного управления, формируемые стабилизатором угла крена Wγ с учетом параметров движения самолета от датчиков по значению заданного угла из селектора, причем выбор одного из предустановленных значений заданного угла крена определяется подключенным на вход селектора сигналом от датчика отклонения руля направления, при этом ключ «ГЛИСС», подаваемый на вход логического блока и формирующий совместно с сигналом отклонения педалей летчиком ключ «НЕЙТРАЛЬ ПЕДАЛЕЙ», прекращающий при отсутствии отклонения педалей обновление значениями текущего угла рыскания величины заданного угла рыскания в запоминающем устройстве и подключающий к системе дистанционного управления самолета-амфибии (гидросамолета) сигнал на отклонение руля направления, формируемый устройством в стабилизаторе угла рыскания Wψ по сигналам заданного угла рыскания из запоминающего устройства и с учетом параметров движения самолета от датчиков.
5. Устройство по п. 4, отличающееся тем, что выбор одного из предустановленных значений заданного угла крена определяется подключенным на вход селектора сигналом от датчика отклонения педалей.
| САМОЛЕТ-АМФИБИЯ (ГИДРОСАМОЛЕТ) С РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ | 2016 |
|
RU2641359C1 |
| САМОЛЕТ-АМФИБИЯ - ЛЕТНО-СПАСАТЕЛЬНЫЙ КОМПЛЕКС | 2013 |
|
RU2542800C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОМ ТАНГАЖА САМОЛЕТА-АМФИБИИ ПРИ ДВИЖЕНИИ ПО ВОДЕ В РЕЖИМЕ ГЛИССИРОВАНИЯ | 2004 |
|
RU2268157C1 |
| ДЕМПФЕР РЫСКАНИЯ САМОЛЕТА | 1999 |
|
RU2194650C2 |
| US 4484721 A1, 27.11.1984. | |||

