Изобретение относится к области авиационной техники, а именно к бортовым системам предотвращения столкновения с землей.
Известно, что причинами тяжелых летных происшествий и катастроф с исправными летательными аппаратами (ЛА) является сочетание ряда неблагоприятных факторов, а именно отсутствие или неполнота информации о наземных препятствиях, влияние факторов внешней среды и ошибок экипажа.
Известна система предупреждения столкновения ЛА с землей по патенту РФ №2271039 С1, МПК 7 G08G 5/04, B64D 45/04, опубл. 02.27.06 г. (www.fips.ru).
Известный способ заключается в том, что система содержит базу данных рельефа, модуль адаптации к типу самолета, блоки заполнения и обновления, блок информационных датчиков и пост управления. Блок вертикального облета соединен с блоками предупреждающих сигналов и отображения. Кроме того, в систему введены локальная карта бокового маневра, ограничитель локальной карты и блок направления разворота. Система позволяет определять направление бокового разворота в случае опасности столкновения ЛА с землей при сохранении направления полета.
Недостатком данного изобретения является то, что система выполняет функции обнаружения угрозы столкновения, сигнализации экипажу об угрозе и вырабатывает рекомендации о направлении выполнения маневра, но не вырабатывает управляющие сигналы, предназначенные для выполнения маневра уклонения в автоматическом режиме.
Известен также способ снижения риска столкновения воздушного судна (ВС) с земной поверхностью («Display for terrain avoidance») по заявке № WO 2004084152, МПК G08G 05/04 от 30.09.2004 (http://v3.espacenet.com).
Способ заключается в том, что предварительно формируют базу данных рельефа подстилающей поверхности (БДРПП), аэронавигационную базу данных (АНБД), базу данных летно-технических характеристик (ЛТХ) ВС. В процессе полета выделяют препятствия по курсу полета, представляющие угрозу столкновения ВС с выделенными препятствиями. Затем вычисляют одну или несколько траекторий полета ВС, исключающих его столкновение с экстремальным из числа выделенных препятствий. По вычисленной траектории рассчитывают параметры уклонения ВС от препятствия, в соответствии с значениями которых генерируют электрические сигналы управления и отображают их на дисплее в качестве рекомендаций для экипажа ВС на совершение маневра.
Недостатком данного аналога является то, что генерируемые сигналы имеют относительно невысокую информативность, отсутствует учет влияния возможных изменений скорости ветровых потоков, а также невозможность прямой и непосредственной реализации в современных и перспективных интегрированных бортовых автоматизированных пилотажных комплексах пилотируемых ЛА и в автоматических системах управления беспилотных ЛА.
Наиболее близким по своей технической сущности к заявленному является известный способ обнаружения и предупреждения угрозы столкновения воздушного судна с препятствиями подстилающей поверхности по патенту № RU 2297047, МПК G08G 05/04 от 2005.08.03 (www.fips.ru).
Способ-прототип заключается в том, что предварительно формируют БДРПП, АНБД, базу данных ЛТХ ВС. Вычисляют границы зоны управления (ЗУ) и зоны внимания (ЗВ) на всех этапах полета ВС. Корректируют границы зон при маневрировании ВС в зависимости от величины вертикальной скорости и изменения скорости ветра. Выделяют препятствия подстилающей поверхности, попавшие в зоны, и определяют их превышения над границами зон. Формируют информационные и управляющие сигналы экипажу ВС с последующей их индикацией. Порядок обработки, индикации сигналов для экипажа, а также дополнительное изменение границ зон при изменении этапов и режимов полета ВС упрощает принятие решения экипажем на выполнение маневра, обеспечивающего своевременное уклонение ВС от препятствий.
Способ-прототип имеет те же недостатки, что и указанные выше аналоги. А именно, он не позволяет автоматизировать процесс маневра уклонения, что снижает уровень безопасности полета и не позволяет использовать указанный способ в системах управления беспилотными ЛА. Второй крупный недостаток заключается в том, что указанный способ не гарантирует для исправленного ЛА преодоления препятствия с минимально необходимым запасом по высоте при любых изменениях скорости ветра в допустимых пределах.
Заявленное техническое решение расширяет арсенал средств данного предназначения.
Известно, что в пересеченной местности со сложным рельефом, а также вблизи наземных препятствий имеют место искажения поля ветра, которые оказывают существенное влияние на параметры полета, причем их появление обычно бывает внезапным. Существенное влияние на исход преодоления препятствия оказывает человеческий фактор, а именно ошибочные действия пилота и запаздывание, неверная оценка ситуации и неадекватная реакция.
С целью снижения риска столкновения с наземными препятствиями при приближении к земле исправного ЛА следует использовать на борту ЛА полную и достоверную информацию, автоматизировать процесс обработки этой информации с учетом влияния внешних возмущающих воздействий и человеческого фактора, а также выработки и исполнения управляющих воздействий, направленных на уклонение от столкновения с землей.
Поставленная цель достигается тем, что в известном способе предупреждения угрозы столкновения ЛА, оборудованного приводами органов управления высотой полета, а также приводами органов управления тягой двигателей, с препятствиями подстилающей поверхности, заключающемся в том, что предварительно формируют базу данных рельефа подстилающей поверхности, аэронавигационную базу данных, базу данных летно-технических характеристик летательного аппарата, в процессе полета вычисляют границы последовательно примыкающих к друг другу зоны внимания и зоны управления, а из числа препятствий подстилающей поверхности выделяют препятствия, представляющие угрозу столкновения с ними летательного аппарата, а именно попавшие в зону управления и зону внимания, причем траектории полета и параметры уклонения летательного аппарата, исключающие столкновение летательного аппарата с препятствиями, вычисляют с учетом всех препятствий, находящихся в зоне управления, а каждая вычисленная траектория, исключающая угрозу столкновения летательного аппарата с препятствием, является осью соответствующей области прогноза движения, ширина которой зависит от скорости и высоты полета летательного аппарата, генерируют электрические сигналы управления, которые отображают с помощью средств индикации для их учета при принятии решения экипажем на маневр летательного аппарата, согласно изобретению для вычисленной траектории в горизонтальной плоскости в пределах границ зоны управления выделяют экстремальное препятствие, находящееся в области прогноза вычисленной траектории, с учетом ограничений на параметры движения и возмущения экстраполируют траекторию в вертикальной плоскости и вычисляют прогнозируемую высоту пролета препятствия, рассчитывают минимально допустимую высоту пролета указанного экстремального препятствия, а также номинальную высоту пролета, вычисляют параметры номинальной траектории полета в вертикальной плоскости, вычисляют границу допустимых отклонений от номинальной траектории, величину и знак управления по высоте, в зависимости от отклонений от номинальной траектории и параметров движения летательного аппарата подают электрические сигналы управления на исполнительное устройство органа управления высотой полета, а при выходе за нижнюю границу допустимых отклонений от номинальной траектории, а также при уменьшении скорости полета летательного аппарата относительно номинальной или при обнаружении попадания в условия сдвига ветра формируют управляющий сигнал, переводящий двигатели на режим максимальной допустимой тяги с выдачей сигнализации экипажу, причем, если прогнозируемая высота пролета экстремального препятствия оказывается меньше минимально допустимой, выполнение вертикального маневра блокируют и принимают решение о маневре в горизонтальной плоскости.
Новым также является то, что при полете ЛА в условиях слабых ветровых возмущений или при их отсутствии управляющий сигнал по высоте вычисляют в виде суммы отклонений от номинальной траектории по высоте, отклонения от номинальной вертикальной скорости и скорости тангажа, причем каждую из указанных величин умножают на постоянные или переменные коэффициенты, зависящие от типа ЛА и режима полета. Указанную сумму или ее часть ограничивают по амплитуде, электрический сигнал подают на привод органа управления высотой полета, а граница допустимых отклонений от номинальной траектории представляет собой линию, совпадающую с траекторий движения с располагаемой вертикальной перегрузкой.
При выполнении полета в сложных метеоусловиях заранее вводят данные метеопрогноза о диапазоне изменения скорости и направления ветра, вычисляют аэродинамические коэффициенты ЛА для текущего этапа и режима полета, а также ограничения на параметры движения, рассчитывают характеристики номинального движения и номинальной траектории, полет по которой гарантирует прохождение препятствия с превышением, соответствующим минимально допустимой высоте при любых изменениях ветровых возмущений в указанных заранее ограничениях. В каждый момент времени от входа в зону управления и до пролета экстремального препятствия (ЭП) вычисляют управления, обеспечивающие стабилизацию на номинальной траектории, формируют соответствующие электрические сигналы и подают их на исполнительное устройство органов управления ЛА.
Для ЛА вертолетной схемы управляющие воздействия по высоте подают на привод объединенного управления «шаг-газ», а также на привод автомата перекоса.
Вычисленный сигнал управления сглаживают, масштабируют и подают на командный пилотажный прибор в виде директорного индекса, пилот ЛА в соответствии с положением командного индекса управляет ЛА, воздействуя на органы его управления, и тем самым стабилизирует ЛА на номинальной траектории.
Для беспилотного ЛА управляющие сигналы формируют в наземном стационарном или мобильном пункте управления полетом и с помощью линии передачи данных передают на борт ЛА, оборудованного приемопередатчиком, преобразуют в электрические сигналы, поступающие на приводы органов управления высотой полета и тягой двигателей.
Благодаря указанной новой совокупности существенных признаков за счет формирования управляющих сигналов, воздействующих на приводы органов управления высотой полета и тягой двигателей, и сигнализации экипажу достигается возможность совершения маневра ЛА в автоматическом режиме с учетом влияния ветровых возмущений, что снижает влияние человеческого фактора и вероятность столкновения ЛА с препятствиями подстилающей поверхности. Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Заявленный способ поясняется чертежами, на которых показаны:
фиг.1 поясняет вертикальное и горизонтальное сечение зоны управления и зоны внимания;
фиг.2 поясняет вид траектории в вертикальной плоскости;
фиг.3 - структурная схема бортового устройства, реализующего заявленный способ;
фиг.4 - алгоритм работы процессора;
фиг.5 - вид экрана дисплея командного пилотажного индикатора;
фиг.6 поясняет построение номинальной траектории и области допустимых отклонений;
фиг.7 поясняет характеристики номинального движения при действии экстремальных ветровых возмущений.
При выполнении полетов ЛА разных типов на небольших высотах, особенно по свободным траекториям, может возникнуть опасность встречи с наземными препятствиями, в том числе с элементами рельефа или искусственными сооружениями. Указанная опасность возрастает под влиянием различного рода помех, создаваемых метеоусловиями, и человеческого фактора.
Известные пути решения этой проблемы основываются на включении в состав бортового оборудования специальных систем предупреждения столкновения, использующих информацию о препятствиях подстилающей поверхности, однако они не в полной мере соответствуют требованиям по безопасности полетов, так как вырабатываемые ими сигналы недостаточно информативны, не учитывают динамику изменения режимов полета, изменений метеоусловий и других дестабилизирующих факторов.
Адекватное решение может быть найдено путем построения прогноза траектории, обеспечивающей уклонение от угрозы столкновения с учетом действия факторов внешней среды, а также автоматизации выработки управляющих воздействий по устранению указанной угрозы и автоматизации выполнения процесса управления маневром.
Эта задача решается в заявленном способе.
Возможность реализации заявленного способа с достижением указанного технического результата объясняется следующим образом.
На этапе подготовки полета предварительно формируют базы данных.
В качестве БДРПП используют цифровые карты местности, которые предварительно заносят в память бортовой системы на этапе подготовки полета с учетом планируемого маршрута полета и возможных уклонений ЛА от этого маршрута (запасные аэродромы, обход грозовой деятельности и т.д.). В цифровом виде карта содержит данные о рельефе подстилающей поверхности и может использоваться для дальнейших расчетов без предварительной обработки ее данных или по правилам использования цифровых карт, которые содержатся в такой базе данных. В цифровых картах о всех возвышенностях (препятствиях) как естественных, так и искусственных, хранят данные о их географических координатах: φ, [град] - широта, λ,[град] - долгота, ye, [м] - высота над земным эллипсоидом (геоидом).
АНБД включает информацию об аэропортах и содержит данные о координатах взлетно-посадочных полос (ВПП), их длинах, прямом и обратном азимутах оси ВПП, а также информацию о схемах захода на посадку и взлета. Эти данные учитывают для определения этапа и режима полета ЛА (крейсерский полет, полет в зоне аэродрома, заход на посадку и т.п.). Перечисленные данные известны из нормативных документов и вносятся экипажем в бортовую систему ЛА перед полетом.
База данных ЛТХ включает в себя параметры ЛА, такие как взлетная масса, аэродинамические характеристики, коэффициенты подъемной силы, скороподъемность и т.п., необходимые для выработки сигналов управления на проведение маневра уклонения ЛА от препятствий подстилающей поверхности на каждом этапе полета. Указанные данные содержатся в руководстве по летной эксплуатации ЛА и также предварительно вносятся экипажем в бортовую систему.
После формирования исходных баз данных и начала полета ЛА вычисляют границы зоны управления 1.1 и зоны внимания 1.2 (фиг.1). Каждая зона представляет собой трехмерную область пространства, границы которой определяют в зависимости от режима и этапа полета.
В вертикальной плоскости размеры зон и наклон нижней границы зон (фиг.1а) зависят от текущих параметров полета: путевой скорости, скорости изменения геометрической высоты ЛА; от силы и изменения скорости ветра.
В горизонтальной плоскости параметры и геометрическая форма зон (фиг.1б) зависят от путевой скорости, угловой скорости разворота. При выполнении ЛА маневра разворота боковые границы зон увеличивают в сторону совершения маневра; также для повышения уровня безопасности зоны расширяют при полетах в особых условиях, таких как, например, горная местность, плохие условия видимости, независимо от величины угловой скорости разворота.
В построении зон учитывают параметры времени, которые выбирают исходя из требований по безопасному маневрированию.
Подробная информация об определении параметров зоны управления и зоны внимания представлена в патенте № RU 2297047 от 2005.08.03 (www.fips.ru).
Для управления маневром в вертикальной плоскости используют данные об элементах рельефа и искусственных препятствиях, расположенных на прогнозируемой траектории в горизонтальной плоскости, а также вблизи нее. Для расчета прогнозируемой траектории исходят из текущего курса ψ ЛА и скорости его изменения ωу, которую можно вычислить по углу крена γ и путевой скорости VП по формуле:

или получить дифференцированием путевого угла по времени, а также по сигналу датчика скорости рысканья.
Периодически в БДРПП просматривают все элементы рельефа и искусственные препятствия, которые находятся в области прогноза траектории и попадают в зону управления.
Элементу рельефа, а также искусственному препятствию присваивают признак экстремального препятствия тогда, когда для его преодоления требуется увеличение вертикальной скорости наибольшее по отношению ко всем другим препятствиям, попадающим в область прогноза движения, осью которой является вычисленная траектория в горизонтальной плоскости. Препятствие сохраняет признак экстремального до тех пор, пока оно находится в указанной области или пока в ней не появится препятствие, требующее большего увеличения вертикальной скорости. При каждой смене ЭП пересчитывают и запоминают дальность D0, а именно удаление препятствия от текущего местоположения ЛА, его геометрическую высоту ye, которая хранится в БДРПП, и обратное время полета до препятствия τ0=D0/VП.
Полет любого ЛА проходит в условиях неопределенности относительно будущего влияния воздействий внешней среды. Наиболее опасными являются изменения скорости и направления ветра, которые вызывают потерю высоты. Для учета этого явления, которое называют сдвигом ветра, минимально допустимую высоту пролета препятствия hmd увеличивают на дополнительный запас по высоте had, численно равный максимальной потере высоты из-за действия внешней возмущающей среды. Минимально допустимая высота пролета препятствия hmd зависит от типа ЛА, его геометрических размеров и конструкции.
Номинальная вертикальная координата ЛА в момент пролета ЭП
yN=ye+hmd+had
пересчитывается при каждой новой идентификации ЭП.
Для каждого типа ЛА установлены эксплутационные условия полета, в том числе максимальная скорость ветра.
В пределах указанных ограничений ветер может меняться различным образом. Чем больше величина дополнительного запаса had, тем меньше риск столкновения с препятствиями подстилающей поверхности из-за потери высоты, вызванной действием внешней среды, но повышение запаса приводит к увеличению номинальной вертикальной скорости и вертикальной перегрузки при выполнении маневра, что повышает опасность выхода на недопустимые углы атаки. Величину had вычисляют с учетом погрешности измерения высоты полета и точности ее измерения.
На фиг.2 показано препятствие 2.1, опорная траектория 2.2, представляющая прямую с углом наклона θ°=arctg(yМ-yg0)/D0, где yg0 - геометрическая высота полета ЛА в момент начала маневра, yМ= ye+hmd. На фиг.2 изображен примерный вид номинальной траектории 2.3 в вертикальной плоскости, проходящей через точку с вертикальной координатой yN, и примеры реальной траектории 2.4 (до начала маневра ЛА находился в горизонтальном полете) и реальной траектории 2.5 (до начала маневра ЛА снижался). Реальная траектория обычно отличается от номинальной из-за воздействия ряда факторов, например динамики ЛА и внешних возмущений.
Для проверки реализуемости реальной траектории с учетом ограничений вычисляют прогнозируемую высоту пролета препятствия, которая не может быть менее минимально допустимой.
Определяют границу допустимых отклонений от номинального движения, нахождение в пределах которой является гарантией успешного завершения вертикального маневра уклонения от встречи с препятствием.
Пример построения области допустимых отклонений приведен в приложении 1.
Известно, что для выполнения маневра в вертикальной плоскости используют изменение подъемной силы для ЛА самолетной схемы, в том числе ВС гражданской авиации. Для этой цели служат органы управления высотой, а именно рули высоты и стабилизатор; на ЛА вертолетной схемы органы управления шагом несущего винта и автомата перекоса.
При выбранном способе управления существует наиболее неблагоприятное изменение ветровых возмущений во времени, а именно такое, какое вызывает наибольшее отклонение от невозмущенного движения. Идентификация силы ветровых возмущений производится двумя способами, а именно опосредованно по наличию и величине отклонений от номинального движения, а также непосредственно путем измерений и вычислений изменений составляющих скорости ветра. Изменение скорости ветра может произойти в любой момент времени.
Реакция ЛА на указанные внешние воздействия, а именно на изменение скорости и направления движения воздушных потоков, наступает не мгновенно, а растянуто во времени. Темп потери высоты зависит от динамических характеристик ЛА, а в управляемом полете также и от эффективности управления. Оценку времени реакции на вариации ветра можно рассчитать (см. патент №RU 2297047 от 2005.08.03, www.fips.ru) и подтвердить экспериментальными данными.
Управляющее воздействие, формируемое в процессе выхода на номинальную траекторию и стабилизации на ней, должно быть адекватным величине возмущений, а также должно соответствовать конструктивным и эксплуатационным ограничениям.
Для полета по номинальной траектории необходимо выдерживать номинальные параметры полета: высоту, вертикальную скорость и угол тангажа.
При малом уровне внешних возмущений или при их полном отсутствии, а именно при полете в спокойной атмосфере, используют наиболее экономные линейные законы управления, причем управляющие сигналы вычисляют в форме линейной комбинации отклонений фазовых координат от их номинальных значений. Линейные управления обеспечивают устойчивость динамических систем и плавность переходных процессов в них (см. приложение 1).
Как указано выше, на выполнение маневра уклонения существенное влияние оказывают различного рода помехи, среди которых наиболее опасным является сдвиг ветра, а именно изменение силы и направления ветра. Такие ветровые возмущения весьма разнообразны и имеют различную природу, плохо предсказуемы. К ним относятся, например, микровзрывы, волновые возмущения и др. [Г.А.Филатов, Г.С.Пуминова, П.В.Сильвестров, Безопасность полетов в возмущенной атмосфере. - М.: Транспорт, 1992. - 272 с.]. Во всех указанных случаях метеослужбы могут дать уверенный прогноз лишь относительно диапазона изменения скорости ветра.
Цель данного технического изобретения состоит в том, чтобы в условиях ограниченности времени полета до обнаруженного экстремального препятствия и заранее известных ограничений на ветровые возмущения построить вертикальный маневр, обеспечивающий гарантированный пролет препятствия с запасом по высоте, близким к минимально допустимому.
Для учета влияния метеоусловий вводят данные метеопрогноза относительно диапазона изменения скорости ветра, вычисляют аэродинамические коэффициенты ЛА для текущего этапа и режима полета, а также ограничения на параметры движения, рассчитывают характеристики номинального движения и номинальной траектории, полет по которой гарантирует прохождение препятствия с превышением, соответствующим минимально допустимой высоте при любых изменениях ветровых возмущений в указанных заранее ограничениях, в каждый момент времени от входа в зону управления и до пролета экстремального препятствия вычисляют управления, обеспечивающие стабилизацию на номинальной траектории, формируют электрические сигналы и подают их на исполнительное устройство органов управления ЛА, при этом параметры бокового движения сохраняют постоянными. Пример составления уравнения для указанного номинального движения и вычисления управлений в условиях экстремальных ветровых возмущений поясняется в приложении 2.
При наличии на борту устройств, позволяющих вычислить скорость ветра и ее изменение (см., например, патент № RU 2297047 от 2005.08.03, www.fips.rn), или специальных систем предупреждения попадания в условия сдвига ветра по их срабатывании вырабатывают команду на увеличение тяги двигателей.
На пилотируемых ЛА при отказах приводов или рулевых агрегатов используют в качестве резервного директорный режим управления. Управляющий сигнал сглаживают, масштабируют и подают на командный пилотажный прибор в виде директорного индекса, пилот ЛА в соответствии с положением командного индекса управляет ЛА, воздействуя на органы его управления, и обеспечивает тем самым полет по номинальной траектории.
В автоматическом режиме командный сигнал используют для контроля правильности работы автомата. Пример вычисления командного сигнала приведен в приложении 1.
Данное техническое предложение может быть реализовано и для управления беспилотными ЛА. В этом случае управляющие сигналы формируют в наземном стационарном или мобильном пункте управления полетом и с помощью линии передачи данных передают на борт ЛА, оборудованного приемопередатчиком, преобразуют в электрические сигналы, поступающие на приводы органов управления высотой полета и тягой двигателя.
Заявленный способ предупреждения столкновения ЛА с препятствиями подстилающей поверхности реализуется устройством, структурная схема которого показана на фиг.3. Устройство содержит процессор (П) 3.1, к которому подключены блоки БДРПП 3.2, АНБД 3.3 и базы данных ЛТХ ЛА (БД ЛТХ) 3.4, блок текущих параметров полета (ТПП) 3.5, а также пульт управления и ввода данных ветра (ПУ) 3.6. Выходы процессора подключены к контроллеру управляющих сигналов (КУС) 3.7, выходы которого подключены к входам приводов органов управления высотой и тягой двигателя (ПОУ) 3.9, и генератору электрических сигналов (ГС) 3.8, выходы которого подключены к входам соответствующего индикаторного оборудования (ИО) 3.10. От спутниковой навигационной системы типа GPS или ГЛОНАСС блок ТПП 3.5 поучает данные о текущих координатах ЛА, а именно о широте и долготе, геометрической высоте полета, путевой скорости и путевом угле. В качестве источника информации о параметрах движения ЛА могут быть использованы также инерциальная навигационная система или навигационная система иного типа. Команда на выполнение маневра формируется в устройстве при входе в зону управления с сигнализацией экипажу с упреждением по времени, достаточном для принятия решения.
Алгоритм работы устройства приведен на фиг.4. Для вычисления границ ЗУ в процессор от блоков ЛТХ ЛА 3.4, ТПП 3.5 и ПУ 3.6 поступают соответствующие параметры, позволяющие вычислить эти границы, от блока БДРПП 3.2 поступают данные о возможных препятствиях, для каждого из которых известны его широта φ, долгота λ и высота ye. Затем по вычисленным параметрам ЗУ и полученным данным о высотах и координатах препятствий выделяют те препятствия, которые попадают в пределы ЗУ. При их непопадании дальнейшей обработке эти препятствия не подлежат. При попадании препятствий в ЗУ по данным блоков БДРПП 3.2 и ТПП 3.5 идентифицируют экстремальное препятствие, запоминают его удаление от текущего местоположения ЛА и его геометрическую высоту. Если в указанной области обнаруживают два или более экстремальных препятствий, то в дальнейшей работе алгоритма используют то, чье удаление меньше.
Над экстремальным препятствием строят опорную траекторию. Номинальную траекторию строят в соответствии с принятым способом управления. Если маневр невозможен, а именно в силу летно-технических характеристик и ограничений прогнозируемая высота пролета препятствия меньше минимально допустимой, то выдается сообщение о необходимости выбрать другую траекторию в горизонтальной плоскости. Если отклонения от номинальных параметров движения выходят за границу допустимых отклонений, а также при обнаружении сдвига ветра, формируют команду на увеличение режима двигателей ЛА. По текущим параметрам полета определяют отклонения от номинального движения, на основании которых вырабатывают управляющие воздействия на исполнительные устройства органов управления тангажом и силой тяги двигателей.
Полученные управляющие сигналы после сглаживания и масштабирования подают также на дисплей командного пилотажного индикатора (КПИ).
Примерный вид экрана КПИ показан на фиг.5, где 5.1 - силуэт самолета, 5.2 - линия авиагоризонта, 5.3 - символ вертикаль, 5.4 - шкала тангажа, 5.5 - индекс директорного управления, 5.6 - зона предупреждающей сигнализации, 5.7 - шкала крена, 5.8 - индекс крена, 5.9 - шкала курса, 5.10 - символ заданного направления, 5.11 - индекс фактического путевого угла, 5.12 - счетчик курса, 5.13 - шкала вертикальной скорости, 5.14 - индекс отсчета вертикальной скорости, 5.15 - счетчик вертикальной скорости, 5.16 - сигнализатор опасного сближения с землей, 5.17 - шкала углов атаки, 5.18 - индекс отсчета углов атаки, 5.19 - индекс предельно допустимого угла атаки, 5.20 - шкала отклонений от номинальной траектории, 5.21 - индекс отклонения от номинальной траектории, 5.22 - зона сигнализации об обнаружении ЭП в зоне управления, 5.23 - текущая дальность до ЭП в метрах, 5.24 - высота ЭП в метрах, 5.25 - счетчик вертикальных перегрузок, 5.26 - геометрическая высота в метрах.
Предлагаемый способ предупреждения столкновения ЛА различных типов с элементами рельефа и наземными искусственными препятствиями, заключающийся в автоматизации процесса расчета и исполнения вертикального маневра уклонения в условиях экстремальных, а именно наихудших ветровых возмущений, как следует из материалов описания, обеспечивает полностью достижение поставленной цели, а именно снижение риска столкновения ЛА с наземными препятствиями с учетом влияния ветровых воздействий и человеческого фактора.
Приложение 1
ЛИНЕЙНЫЕ УПРАВЛЕНИЯ
Необходимые условия физической реализуемости вертикального маневра уклонения от столкновения с препятствиями 6.1 с учетом ограничений на располагаемую перегрузку ηy, а также на максимальную
вертикальную скорость Vym поясняются фиг.6 и имеют вид:
 ,
,  .
.
Здесь
 ,
,
D1=D0-Rθ0, y1=y0-0.5Rθ0 2,
y0 - высота ЛА в момент начала маневра, VП - путевая скорость,

D2=D1-RθМ.
Уравнение нижней границы допустимых отклонений 6.4:
(R+y1-y)2+(D1-D)2=R2 при D0>D>D2
y=yM-θМD при D2≥D≥0.
В случае если полет выполняется в условиях штиля и метеопрогноз благоприятен, то при расчете номинальный траектории 6.3 дополнительный запас по высоте had назначают достаточно малым и, в частности равным нулю, в этом случае номинальная траектория совпадет с опорной 6.2. Если существует опасность попадания в условия сдвига ветра, то величину had заранее увеличивают.
При обнаружении экстремального препятствия had присваивается максимальное значение и запоминается had0=had. При условии отсутствия сдвига ветра, и/или когда отклонения от номинальной траектории малы, величина запаса меняется в соответствии с зависимостью:
had=had0(1-exp(-τ/Te)+exp(-τ0/Te)), 0≤τ≤τ0.
Причем момент обратного времени τ0 начала указанного изменения фиксируется, а величина эквивалентной постоянной времени Te зависит от типа ЛА, а также этапа и режима полета и относится к летно-техническим характеристикам.
В соответствии с заявленным техническим решением при слабых внешних возмущениях, а также при полном их отсутствии предлагается использовать линейный закон управления с ограничениями, имеющий, например, следующий вид:
U1=F(k1Δy+k2ΔVy)-k3ωz.
Управляющий сигнал Ul в соответствии с приведенной выше формулой представляет алгебраическую сумму двух слагаемых, первое из которых является ограниченной суммой отклонений от номинальной траектории Δy=y-yN по высоте и
ΔVy=Vy-VyN по вертикальной скорости, умноженных на соответствующие коэффициенты k1 и k2, а второе слагаемое является скоростью тангажа, умноженной на свой коэффициент k3. Функция ограничения F дает возможность ограничить величину вертикальной перегрузки ηy. В закон управления дополнительно могут быть введены слагаемые, обеспечивающие уменьшение статических и динамических ошибок.
Сформированный таким образом управляющий сигнал подается на исполнительное устройство, а именно привод органа управления высотой полета.
В реальных автоматах также ограничивают углы отклонения органов управления высотой полета. Все указанные ограничения снижают опасность выхода на критические углы атаки и тем самым сваливания ЛА.
В простейшем случае командный сигнал в операторной записи имеет вид:
где p - оператор дифференцирования, Fu(u) - функция ограничения управляющего сигнала u, ϑ - угол тангажа, T1 и T2 - постоянные времени фильтров, k4 и k5 - постоянные или переменные коэффициенты.
Приложение 2
УПРАВЛЕНИЕ С ГАРАНТИЕЙ В УСЛОВИЯХ ЭКСТРЕМАЛЬНЫХ
ВЕТРОВЫХ ВОЗМУЩЕНИЙ
Задачу выполнения вертикального маневра уклонения от встречи с препятствием предлагается решать с использованием методов управления динамическими системами в условиях неопределенности и конфликта.
Движение ЛА в вертикальной плоскости описывают системой нелинейных дифференциальных уравнений вида:

здесь у - вектор фазовых координат, составляющими которого являются линейные координаты xg, yg, составляющие земной скорости Vxg, Vyg, угол тангажа ϑ, скорость тангажа ω, отклонения органов управления высотой δv и тягой δp; u - вектор управляющих воздействий в виде электрических сигналов, подаваемых на приводы указанных органов управления; v - вектор возмущающих воздействий, в качестве которых приняты горизонтальная Wx и вертикальная Wy составляющие скорости ветра. Заранее известна максимальная величина скорости ветра. Момент появления ветра и характер его изменения предполагают произвольными.
Для отыскания управления, которому должна удовлетворять номинальная траектория, при движении по которой гарантируется прохождение препятствия на высоте не ниже минимально допустимой при любых изменениях ветра в указанных пределах, производят линеаризацию системы (1) относительно движения по опорной траектории и получают систему

где А, В, С - матрицы коэффициентов, рассчитываемых на основании аэродинамических характеристик ЛА.
С помощью неособого линейного преобразования (описанного, например, в книге Красовский Н.Н., Субботин Л.И. Позиционные дифференциальные игры. - Главная редакция физико-математической литературы издательства «Наука», М., 1974. - с.160) вводят новую фазовую координату z=Xkx, где Хk-k-ая вектор-строка фундаментальной матрицы системы  , соответствующая отклонению от опорной траектории по высоте. Фундаментальная матрица, как известно, является решением уравнения
, соответствующая отклонению от опорной траектории по высоте. Фундаментальная матрица, как известно, является решением уравнения  при начальных условиях X(τ=0)=E,
при начальных условиях X(τ=0)=E,
где Е - единичная матрица.
Для системы  справедливо уравнение:
справедливо уравнение:
 .
.
Обозначим φ=XkBu+XkCv.
Экстремальное возмущение по определению минимизирует величину z, цель управления - противоположна. Для экстремального возмущения и оптимального управления справедливо
 ,
,  ,
,  , где um, νm - ограничения на управления и возмущения соответственно.
, где um, νm - ограничения на управления и возмущения соответственно.
Интегрируя уравнение
при начальных условиях z0=Xkx0,
получают функцию  , по определению
, по определению  есть отклонение по высоте в момент пролета экстремального препятствия, т.е. при τ=0. Вид этой функции иллюстрирует график 7.1 на фиг.7.
есть отклонение по высоте в момент пролета экстремального препятствия, т.е. при τ=0. Вид этой функции иллюстрирует график 7.1 на фиг.7.
На фиг.7 обозначен график зависимости  7.2, представляющий собой границу области допустимых значений фазовой координаты z. Если начальные условия таковы, что фазовая координата z при движении системы находится выше указанной границы Г(τ), то при любых изменениях ветра в заранее заданном диапазоне гарантируется проход препятствия на высоте не ниже минимально допустимой. Иными словами для обратного времени τ должно выполняться условие z(τ)≥Г(τ).
7.2, представляющий собой границу области допустимых значений фазовой координаты z. Если начальные условия таковы, что фазовая координата z при движении системы находится выше указанной границы Г(τ), то при любых изменениях ветра в заранее заданном диапазоне гарантируется проход препятствия на высоте не ниже минимально допустимой. Иными словами для обратного времени τ должно выполняться условие z(τ)≥Г(τ).
Вычисляют параметр  обозначенный 7.3 на фиг.7, где
обозначенный 7.3 на фиг.7, где  - соответствует наибольшему значению функции
- соответствует наибольшему значению функции  в момент времени τm,
в момент времени τm,  соответствует моменту времени τ=0, ε выбирают таким образом, чтобы указанная парабола не выходила за границу Г(τ). Если <0, то нет гарантии в успешном завершении маневра.
соответствует моменту времени τ=0, ε выбирают таким образом, чтобы указанная парабола не выходила за границу Г(τ). Если <0, то нет гарантии в успешном завершении маневра.
Номинальной траектории, проходящей сколь угодно близко к минимально допустимой высоте пролета препятствия, соответствует уравнение  , где
, где  описывает квадратичную параболу
описывает квадратичную параболу
 .
.
Вид этой функции иллюстрирует график 7.4 на фиг.7.
Для обеспечения движения по номинальной траектории управление ũ должно минимизировать разность  . Такими свойствами обладает релейное управление
. Такими свойствами обладает релейное управление
 .
.
Для стабилизации на указанной номинальной траектории могут применяться также другие известные алгоритмы и законы управления с использованием отклонений от номинального движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С НАЗЕМНЫМИ ПРЕПЯТСТВИЯМИ | 2009 |
|
RU2397549C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД САМОЛЕТА-ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695249C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2018 |
|
RU2695019C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ВИХРЕВОЙ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2324953C2 |
| СПОСОБ И СИСТЕМА ПРЕДУПРЕЖДЕНИЯ О ВОЗМОЖНОСТИ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ОПАСНУЮ ЗОНУ ВИХРЕВОГО СЛЕДА ГЕНЕРАТОРА ВИХРЕЙ | 2003 |
|
RU2324203C2 |
| СПОСОБ МОДЕЛИРОВАНИЯ НА ПИЛОТАЖНОМ СТЕНДЕ ПОПАДАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В ВИХРЕВОЙ СЛЕД | 2018 |
|
RU2701062C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ТРЕНАЖЕР АВИАЦИОННЫЙ | 2003 |
|
RU2324982C2 |
Изобретение относится к области авиационной техники, а именно к бортовым системам предотвращения столкновения с землей. Способ заключается в предварительном формировании базы данных рельефа подстилающей поверхности, аэронавигационной базы данных, базы данных летно-технических характеристик летательного аппарата (ЛА). Вычисляют границы зоны внимания и зоны управления (ЗУ), выделяют препятствие, представляющее наибольшую угрозу, попавшее в ЗУ и находящееся в зоне прогноза вычисленной траектории. С учетом данных об ограничениях на параметры движения ЛА и внешних воздействий вычисляют параметры номинального движения, обеспечивающие пролет препятствия на высоте, близкой к минимально допустимой. Генерируют сигналы управления согласно выбранному закону управления и с учетом воздействия факторов внешней среды, которые подают на исполнительные органы управления высотой полета и тягой двигателей, а также выводят на экран командного пилотажного индикатора. Технический результат заключается в расширении возможности существующих систем предупреждения столкновения с наземными препятствиями и снижении риска столкновения при действии ветровых возмущений и под влиянием человеческого фактора. 4 з.п. ф-лы, 7 ил.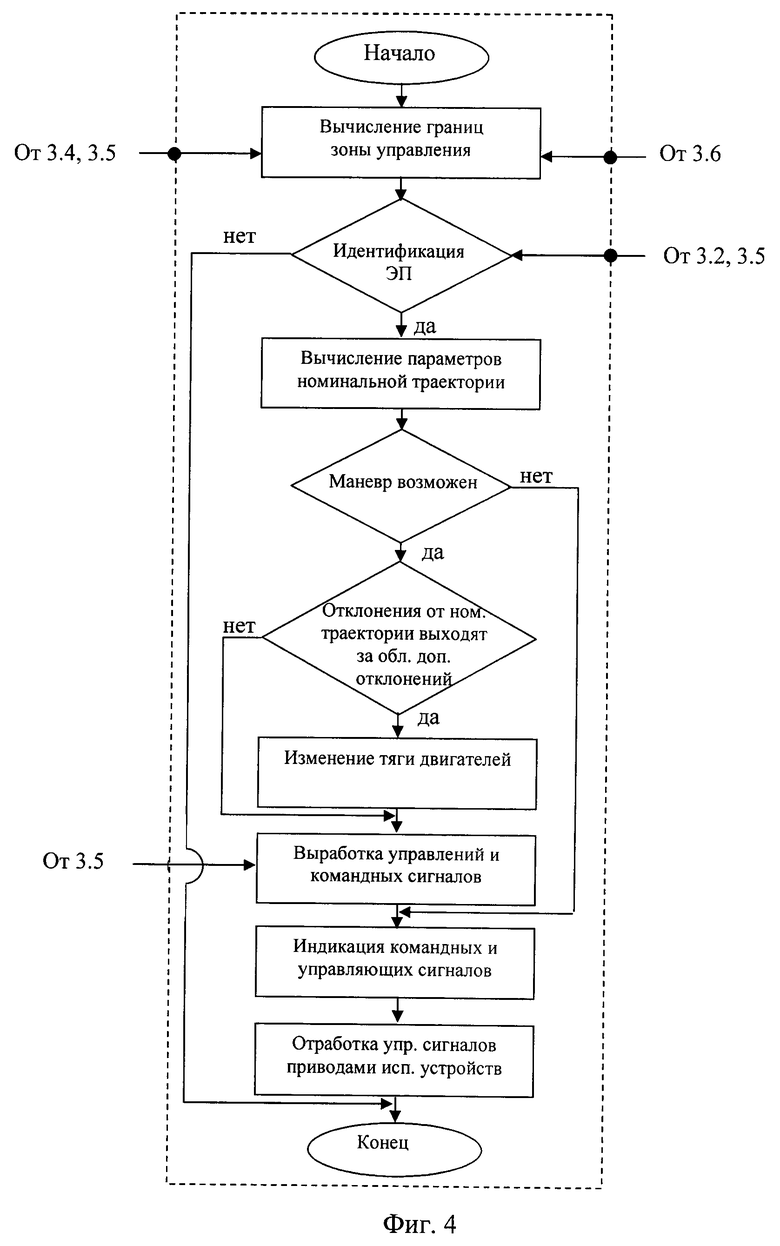
1. Способ предупреждения угрозы столкновения летательного аппарата, оборудованного приводами органов управления высотой полета, а также приводами органов управления тягой двигателей, с препятствиями подстилающей поверхности, заключающийся в том, что предварительно формируют базу данных рельефа подстилающей поверхности, аэронавигационную базу данных, базу данных летно-технических характеристик летательного аппарата, в процессе полета вычисляют границы последовательно примыкающих к друг другу зоны внимания и зоны управления, а из числа препятствий подстилающей поверхности выделяют препятствия, представляющие угрозу столкновения с ними летательного аппарата, а именно, попавшие в зону управления и зону внимания, причем траектории полета и параметры уклонения летательного аппарата, исключающие столкновение летательного аппарата с препятствиями, вычисляют с учетом всех препятствий, находящихся в зоне управления, а каждая вычисленная траектория, исключающая угрозу столкновения летательного аппарата с препятствием, является осью соответствующей области прогноза движения, ширина которой зависит от скорости и высоты полета летательного аппарата, генерируют электрические сигналы управления, которые отображают с помощью средств индикации для их учета при принятии решения экипажем на маневр летательного аппарата, отличающийся тем, что для вычисленной траектории в горизонтальной плоскости в пределах границ зоны управления выделяют экстремальное препятствие, находящееся в области прогноза вычисленной траектории, с учетом ограничений на параметры движения и возмущения экстраполируют траекторию в вертикальной плоскости и вычисляют прогнозируемую высоту пролета препятствия, рассчитывают минимально допустимую высоту пролета указанного экстремального препятствия, а также номинальную высоту пролета, вычисляют параметры номинальной траектории полета в вертикальной плоскости, вычисляют границу допустимых отклонений от номинальной траектории, величину и знак управления по высоте, в зависимости от отклонений от номинальной траектории и параметров движения летательного аппарата подают электрические сигналы управления на исполнительное устройство органа управления высотой полета, а при выходе за нижнюю границу допустимых отклонений от номинальной траектории, а также при уменьшении скорости полета летательного аппарата относительно номинальной или при обнаружении попадания в условия сдвига ветра формируют управляющий сигнал, переводящий двигатели на режим максимальной допустимой тяги с выдачей сигнализации экипажу, причем, если прогнозируемая высота пролета экстремального препятствия оказывается меньше минимально допустимой, выполнение вертикального маневра блокируют и принимают решение о маневре в горизонтальной плоскости.
2. Способ по п.1, отличающийся тем, что при полете в условиях слабых ветровых возмущений или при их отсутствии управляющий сигнал по высоте вычисляют в виде суммы отклонений от номинальной траектории по высоте, отклонения от номинальной вертикальной скорости и скорости тангажа, причем каждую из указанных величин умножают на постоянные или переменные коэффициенты, зависящие от типа летательного аппарата и режима полета, а указанную сумму или ее часть ограничивают по амплитуде, электрический сигнал подают на привод органа управления высотой полета, а граница допустимых отклонений от номинальной траектории представляет собой линию, совпадающую с траекторией движения с располагаемой вертикальной перегрузкой.
3. Способ по п.1, отличающийся тем, что заранее вводят данные метеопрогноза о диапазоне изменения скорости и направлении ветра, вычисляют аэродинамические коэффициенты летательного аппарата для текущего этапа и режима полета, а также ограничения на параметры движения, рассчитывают характеристики номинального движения и номинальной траектории, полет по которой гарантирует прохождение препятствия с превышением, соответствующим минимально допустимой высоте при любых изменениях ветровых возмущений в указанных заранее ограничениях, в каждый момент времени от входа в зону управления и до пролета экстремального препятствия вычисляют управления, обеспечивающие стабилизацию на номинальной траектории, формируют соответствующие электрические сигналы и подают их на исполнительное устройство органов управления летательного аппарата.
4. Способ по п.1, отличающийся тем, что сигнал управления сглаживают, масштабируют и подают на командный пилотажный прибор в виде директорного индекса, а пилот летательного аппарата в соответствии с положением командного индекса управляет летательным аппаратом, воздействуя на органы его управления, и стабилизирует летательный аппарат на номинальной траектории.
5. Способ по п.1, отличающийся тем, что управляющие сигналы формируют в наземном стационарном или мобильном пункте управления полетом и с помощью линии передачи данных передают на борт летательного аппарата, оборудованного приемо-передатчиком, преобразуют в электрические сигналы, поступающие на приводы органов управления высотой полета и тягой двигателей.
| СПОСОБ ОБНАРУЖЕНИЯ И ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВОЗДУШНОГО СУДНА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2297047C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2262746C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 1993 |
|
RU2124760C1 |
| US 6583733 B2, 24.06.2003 | |||
| WO 2004084152 A2, 30.09.2004. | |||

