Изобретение относится к области распознавания образов и может быть использовано при решении задач предварительной обработки изображения с целью определения контуров объектов, которые характеризуются монотонностью изменения интенсивности цвета.
Известны способы и устройства для определения контуров изображений.
В частности, известен способ выделения контуров движущихся объектов [RU 2466456 C2, G06K 9/50, 10.11.12], включающий обнаружение движущихся пикселей по принципу межкадрового вычитания, определение направления движения обнаруженных пикселей с учетом направления движения смежных пикселей, формирование движущихся объектов путем объединения смежных пикселей с одним направлением и наличия пикселей в восьмисвязной окрестности, пространственное дифференцирование обнаруженных объектов оператором Собела, скелетизацию контурных линий на градиентном изображении методом подавления точек не максимальной яркости и пороговую обработку скелетного градиентного изображения на основе максимума и минимума энтропии.
Недостатком этого технического решения является сложность технической реализации.
Наиболее близким по технической сущности к предложенному является устройство выделений контуров [RU 2362210 C1, G06K 9/36, 20.07.2009], содержащее датчик изображения, блок выделения кадрового и строчного импульсов (БВКСИ), аналого-цифровой преобразователь (АЦП), генератор, цифровой сигнальный процессор (ЦСП), оперативное запоминающее устройство (ОЗУ), блок фильтрации, блок пространственного дифференцирования, буферную память блока фильтрации, буферную память блока пространственного дифференцирования, контроллер USB, причем выход датчика изображения подключен ко входу БВКСИ и к аналоговому входу AS АЦП, выход генератора соединен со входом синхронизации CLK АЦП, входы-выходы шины памяти ЦСП соединены с соответствующими входами-выходами ОЗУ, выходы кадрового FSI и строчного SSI импульсов БВКСИ подключены ко входам нулевого INTO и первого INT1 прерывания ЦСП соответственно, информационный выход D и выход готовности данных RDY АЦП подключены к информационному входу D и входу второго прерывания INT2 ЦСП, соответственно, выход записи/чтения WR шины ускорителей ЦСП соединен с соответствующими входами буферной памяти блока фильтрации, буферной памяти блока пространственного дифференцирования и с соответствующими выходами блока фильтрации и блока пространственного дифференцирования; выход сигнала запуска блока фильтрации FST шины ускорителей ЦСП подключен ко входу запуска FST блока фильтрации; выход сигнала запуска блока пространственного дифференцирования SDST шины ускорителей ЦСП подключен ко входу запуска SDST блока пространственного дифференцирования; выход готовности данных RDY1 шины ускорителей ЦСП подключен ко входу готовности данных RDY буферной памяти блока фильтрации и к соответствующему выходу блока фильтрации; выход готовности данных RDY2 шины ускорителей ЦСП подключен ко входу готовности данных RDY буферной памяти блока пространственного дифференцирования и соответствующему выходу блока пространственного дифференцирования; линии данных D шины ускорителей ЦСП подключены к линиям данных D буферной памяти блока фильтрации, к линиям данных D буферной памяти блока пространственного дифференцирования и к соответствующим линиям блока фильтрации и блока пространственного дифференцирования; выходы линий адреса А шины ускорителей ЦСП подключены к линиям адреса буферной памяти блока фильтрации, к линиям адреса А буферной памяти блока пространственного дифференцирования и к соответствующим выходным линиям блока фильтрации и блока пространственного дифференцирования, выход готовности данных FR блока фильтрации соединен со входом готовности данных блока фильтрации FR шины ускорителей ЦСП, выход готовности данных SDR блока пространственного дифференцирования соединен со входом готовности данных SDR шины ускорителей ЦСП, входы-выходы DC шины контроллера ЦСП соединены с соответствующими входами-выходами USB контроллера, входы-выходы D+ и D- которого подключены к шине USB.
Недостатком устройства является его относительно низкая помехоустойчивость, обусловленная тем, что при выделении контура решение принимается с учетом только первой производной изменения интенсивности в изображении.
Требуемый технический результат заключается в повышении помехоустойчивости.
Требуемый технический результат достигается тем, что в устройство, содержащее датчик элементов изображения, согласно изобретению введены блок формирования пороговых значений скорости и ускорения изменения интенсивности элементов изображения, вход которого соединен с выходом датчика элементов изображения, и последовательно соединенные блок формирования восьмисвязной окрестности элементов изображения, вход которого соединен с выходом блока формирования элементов изображения, блок последовательного выделения триад в восьмисвязной окрестности элемента изображения, блок памяти триад восьмисвязной окрестности элемента изображения, блок дифференцирования триад и решающий блок, управляющий вход которого соединен с выходом блока формирования пороговых значений скорости и ускорения изменения интенсивности элементов изображения.
На чертежах представлены:
фиг.1 - функциональная схема устройства для определения контуров объектов в изображении;
фиг.2-8 - диаграммы, отражающие сущность работы устройства
Устройство для определения контуров объектов в изображении содержит датчик 1 элементов изображения, блок 2 формирования пороговых значений скорости и ускорения изменения интенсивности элементов изображения, блок 3 формирования восьмисвязной окрестности элементов изображения, блок 4 последовательного выделения триад в восьмисвязной окрестности элемента изображения, блок 5 памяти триад восьмисвязной окрестности элемента изображения, блок 6 дифференцирования триад, решающий блок 7.
В устройстве для определения контуров объектов в изображении блок 2 формирования пороговых значений скорости и ускорения изменения интенсивности элементов изображения соединен с выходом датчика 1 элементов изображения, блок 3 формирования восьмисвязной окрестности элементов изображения соединен с выходом 1 блока формирования элементов изображения и соединен с последовательно соединенными блоком 4 последовательного выделения триад в восьмисвязной окрестности элемента изображения, блоком 5 памяти триад восьмисвязной окрестности элемента изображения, блоком 6 дифференцирования триад и решающим блоком 7, управляющий вход которого соединен с выходом блока 2 формирования пороговых значений скорости и ускорения изменения интенсивности элементов изображения.
Устройство содержит элементы, охарактеризованные на функциональном уровне, и описываемая форма реализации предполагает использование программируемого (настраиваемого) многофункционального средства, поэтому ниже при описании его работы и выполняемых функций представляются сведения, подтверждающие возможность выполнения таким средством конкретной предписываемой ему в составе данного устройства функции, в частности вычислительные алгоритмы и математические выражения.
Работает устройство для определения контуров объектов в изображении следующим образом.
Решение задачи распознавания объектов, как правило, основывается на сравнении исходного изображения с эталоном и определении степени соответствия. Однако в случае, когда распознаваемый объект является лишь фрагментом исходного изображения, данная задача существенно затрудняется. Примером таких задач являются распознавание номера автомобиля на общей фотографии, распознавание лиц и т.д. Одним из способов обеспечить распознавание искомого объекта является предварительная обработка исходного изображения с целью выделения на нем области, соответствующей распознаваемому объекту. Данная обработка может заключаться в выделении областей изображения, отличающихся относительной монотонностью изменения интенсивности цвета (выделение контуров объектов на изображении).
Под контуром при этом понимается множество точек (элементов изображения), определяющих границы областей изображения, обладающих монотонностью изменения цвета.
Выделение множества точек, соответствующих контурам различных объектов на изображении, позволяет сравнить их с контуром искомого объекта и выделить, таким образом, область, в которой должна решаться задача распознавания.
В дальнейшем, при решении возможной задачи сравнения контуров, полученных на исходном изображении, с контуром эталонного объекта множество точек, составляющих контур, может быть аппроксимировано линиями. Данная операция позволит при сравнении исходного изображения с эталоном использовать отношение подобия (например, на основе углов между отдельными линиями контура) и осуществлять поиск искомого объекта в случае отличия его абсолютных размеров на исходном изображении от эталона, а также в случае поворота объекта на изображении.
За счет описанных возможностей предварительная обработка, заключающаяся в выделении контуров объектов на изображении, позволяет снизить вычислительный ресурс, требуемый для решения задачи распознавания и повысить достоверность идентификации объекта.
Исходным положением, используемым для выделения контуров объектов в изображении, является допущение о том, что отдельные объекты на исследуемом изображении описываются областями, обладающими однотонным цветом или несколькими цветами с монотонным изменением интенсивности и значительном изменении интенсивности на границах, что позволяет выделить контур объекта в изображении.
Однако на реальных изображениях, полученных с фотографий или фрагментов видеоизображений, всегда существует множество шумов - элементов изображения, выделяющихся из общего фона за счет особенностей формирования изображения.
Для повышения достоверности и оперативности распознавания шумы должны фильтроваться на этапе выделения контуров реальных объектов.
В качестве исходных данных рассматривается интенсивность цвета элементов изображения aij={0…255}. При этом считается, что 0…255 - диапазон изменения интенсивности цвета в элементе изображения (например, от белого «0» к черному «255»). Для обработки многоцветного изображения процедура выделения контуров может либо проводиться по каждому составляющему цвета (по красному цвету, зеленому и синему) либо интенсивность цвета в элементе изображения может усредняться.
Для оценки элементов изображения с целью выделения контура и устранения шума, для каждого из элементов изображения, исключая крайние (первую и последнюю строку и первый и последний столбец), производится оценка интенсивности цвета в самом элементе изображения и его окрестностях (8 смежных элементах)
 .
.
По каждому из направлений (вертикаль, горизонталь, диагонали) от 0 до 135 градусов с шагом 45 градусов выделяются триады элементов изображения, включая исходный:
{(i-1, j), (i, j), (i+1, j}
{(i, j-1), (i, j), (i, j+1)}
{(i-1, j-1), (i, j), (i+1, j+1)}
{(i-1, j+1}, (i, j), (i+1, j-1)}
Последовательно, для каждого из направлений решается следующая задача.
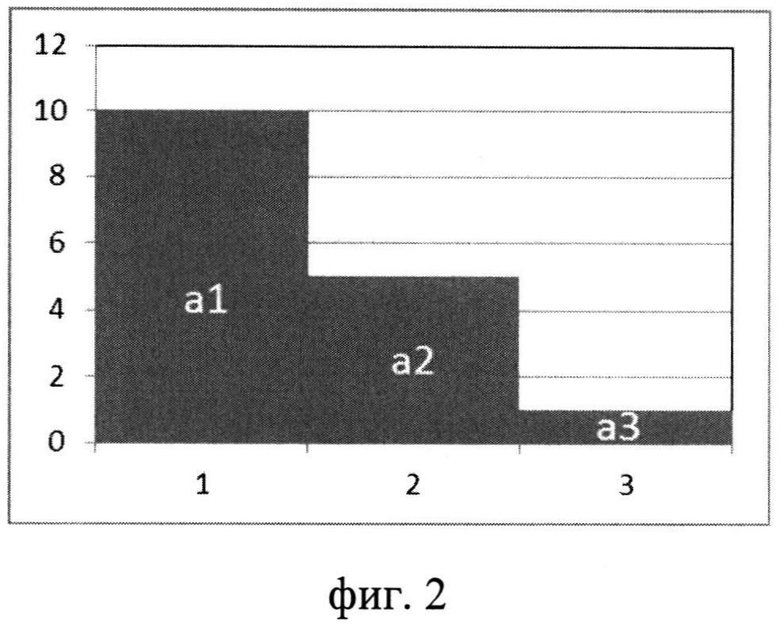
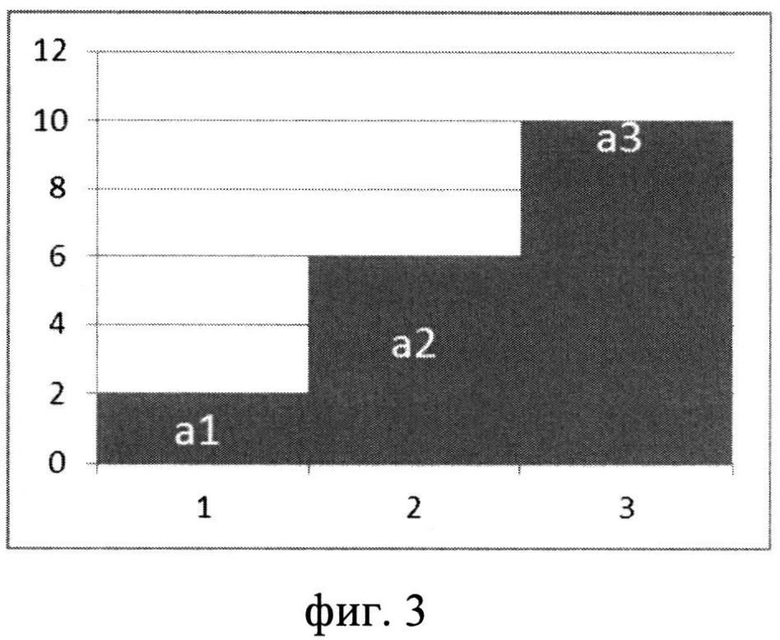
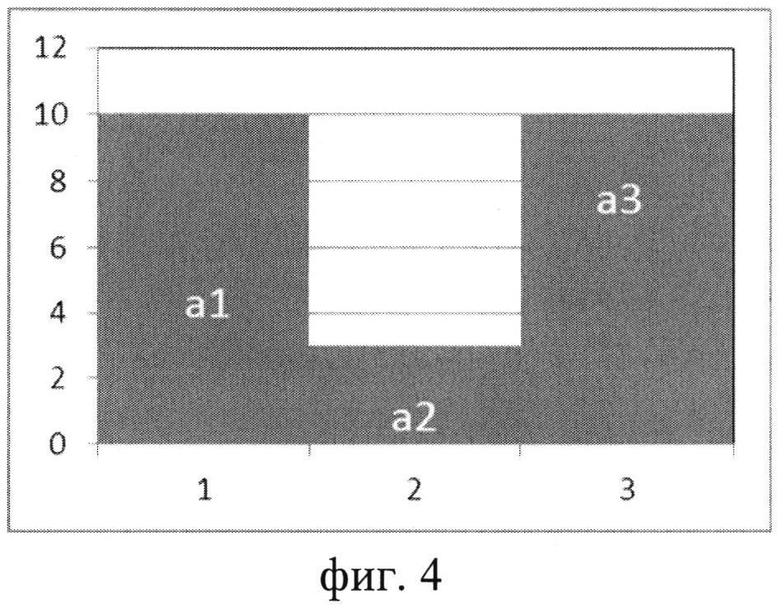
Пусть интенсивность цвета элементов изображения рассматриваемой триады (a 1, a 2, a 3). При этом исследуемый элемент изображения a 2 будет центральном для каждой из триад, а два других элемента в триаде характеризуют его окрестность. Принимается допущение, что интенсивность цвета одного из трех элементов изображения может являться шумом, т.е. ее значение не должно повлиять на выделение контура.
Работа предлагаемого устройства основана на выделение контуров объектов на изображении посредством оценки окрестностей элементов изображения по двум параметрам.
Первый параметр - скорость изменения интенсивности цвета в окрестности элемента изображения K.
Значение параметра оценивается как разность между значением интенсивности цвета двух элементов изображения, деленная на расстояние между ними (расстояние измеряется количеством элементарных участков изображения между точками - количеством «пикселей» изображения, которое аналогично количеству точек между двумя рассматриваемыми элементами изображения  ).
).
Соответственно для соседних элементов изображения интенсивности изменения цвета будет определяться просто разностью интенсивности цветов  .
.
Чем больше абсолютная величина изменения интенсивности цвета в окрестностях элемента изображения, тем вероятнее, что рассматриваемый элемент относится к контуру. Максимальному значению K=255 будет соответствовать переход от черного к белому цвету, или наоборот.
Второй параметр - ускорение интенсивности изменения цвета в окрестности элемента изображения Q.
Значение этого параметра рассчитывается как разность между изменением интенсивности цвета, деленная на расстояние.
Так как для решения задачи знак данных параметров не важен, целесообразно рассматривать его модуль.
Соответственно в дальнейшем рассматриваются модули этих двух параметров.
Соответственно, если рассматривается триада элементов изображения, то значения скорости и ускорения изменения интенсивности цвета могут быть рассчитаны по следующим зависимостям:


Выделению контура объекта (под выделением контура понимается что исследуемый элемент изображения a 2, относится к контуру) будет соответствовать условие:
Таким образом, чтобы принять решение о том, что элемент изображения a 2 относится к контуру, интенсивность изменения цвета в его окрестностях должно быть выше порога Kпор и при этом ускорение интенсивности изменения цвета в окрестности элемента изображения а 2 должно быть меньше порога Qпор.
Пороговые значения могут определяться исходя из диапазона изменения интенсивности цветов на изображении в целом таким образом, чтобы не пропустить объекты изображения. Например,

Датчик 1 элементов изображения формирует значения интенсивности цвета элементов изображения, которые могут быть представлены в виде матрицы, число строк и столбцов которой соответствует разрешению изображения по горизонтали и вертикали. На основании максимального и минимального значения интенсивности цвета элементов изображения в блоке 2 формирования пороговых значений скорости и ускорения изменения интенсивности цвета в изображении формируются пороговые значения по соотношениям (2).
Для определения контуров объектов на изображения последовательно для каждого из элементов изображения, исключая граничные элементы (1-я и последняя строка изображения и 1-й и последний столбец) в блоке 3 формирования восьмисвязной окрестности элемента изображения производится формирование матрицы, состоящей из 9 значений интенсивности цвета элементов изображения, смежных с рассматриваемым. На основании данной матрицы, при последовательном изменении угла направления от 0 до 135 градусов с шагом 45 градусов, в блоке 4 последовательного выделения триад в восьмисвязной окрестности элемента изображения формируются четыре триады значений интенсивности цвета по направлениям в окрестностях элемента изображения, которые запоминаются в блоке 5 памяти триад восьмисвязной окрестности элемента изображения. Значения интенсивности цвета в триадах последовательно передаются на вход блока 6 дифференцирования триад, в котором на основе дифференцирования каждой из триад формируются значения показателей скорости и ускорения изменения интенсивности цвета в окрестностях элемента изображения по формулам  ,
,  , которые поступают на вход решающего блока 7, где сравниваются с пороговыми значениями, определяемым по формулам (2), и принимается решение о принадлежности элемента изображения контуру. На выходе решающего блока 7 формируется сигнал логической единицы, если рассматриваемый элемент изображения принадлежит контуру, и логического нуля - если рассматриваемый элемент изображения не принадлежит контуру.
, которые поступают на вход решающего блока 7, где сравниваются с пороговыми значениями, определяемым по формулам (2), и принимается решение о принадлежности элемента изображения контуру. На выходе решающего блока 7 формируется сигнал логической единицы, если рассматриваемый элемент изображения принадлежит контуру, и логического нуля - если рассматриваемый элемент изображения не принадлежит контуру.
Условие 1 определяет, что изменение интенсивности цвета в окрестностях контура должно характеризоваться большой скоростью и при этом быть относительно гладкой функцией (обладать небольшим ускорением). При этом применение условия (1) при анализе значения K позволяет устранить влияние шума в центральном элементе изображения триады a 2, а значение Q - устранить влияние шума в одном из крайних элементов изображения триады. Отсюда следует, что влияние шума устраняется за счет того, что при расчете скорости изменения интенсивности цвета учитываются только значения интенсивности цвета крайних элементов изображения триады, а шум в центральном элементе изображения при этом не значим, но, в то же время, при расчете ускорения изменения интенсивности цвета шум в одном из крайних элементов изображения, с учетом значения двух других, приведет к невыполнению условия 1.
Пример.
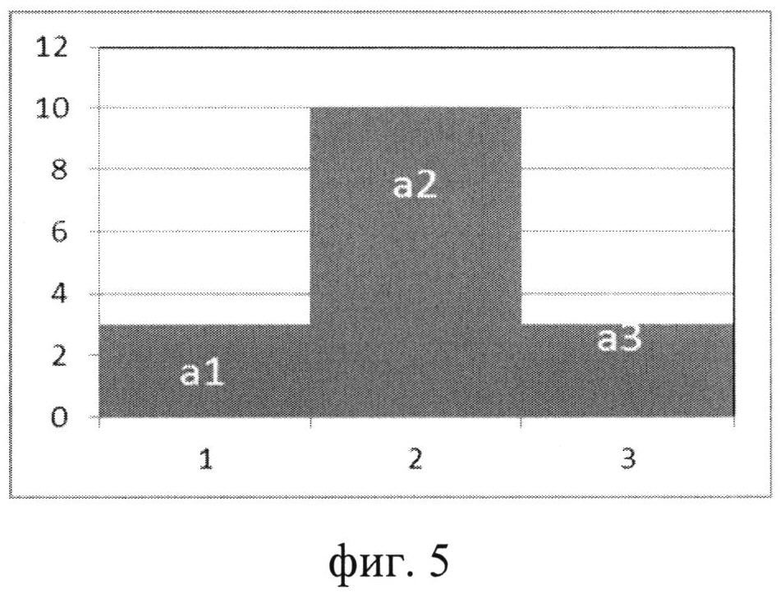
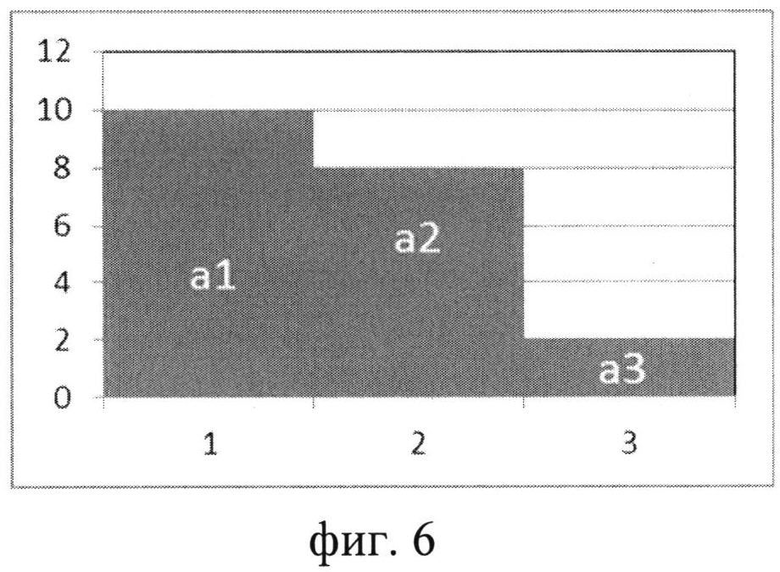
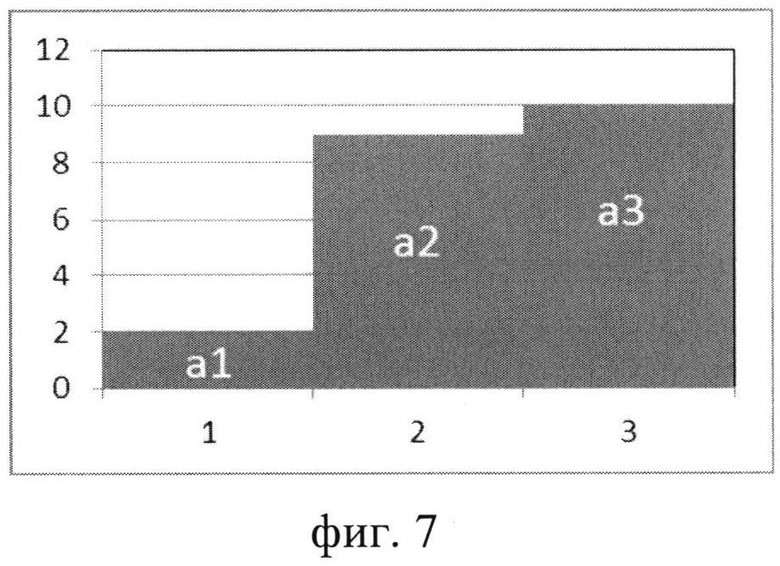
Допустим, что пороги Kпор=3Qпор=2.
На чертежах (фиг.3-4) оба условия выполняются (K=4, Q=0). Следовательно центральный элемент изображения триады является контуром.
На чертежах (фиг.5-6) не выполняется условие изменения интенсивности цвета в окрестности элемента изображения (K=0). То есть отклонение интенсивности цвета в центральном элементе изображения обусловлено шумом.
На чертежах (фиг.7-8) не выполняется условие по Q (Q=6). То есть элемент изображения a 2 не относится к контуру, хотя изменение интенсивности цвета относительно него больше порога (K=4). Это позволяет убрать шум, обусловленный отклонением одного из крайних элементов изображения.
При этом, если контур находится в крайнем элементе изображения, то он будет выделен на следующей итерации, когда текущий крайний элемент изображения триады (a 1 или a 3) будет рассматриваться как центральный.
Таким образом, оценка скорости и ускорения изменения интенсивности цвета в окрестностях элемента изображения позволяет выделить контуры областей на изображении и при этом снизить влияние шума, обусловленного отклонением интенсивности цвета отдельных элементов изображения. Этим самым достигается требуемый технический результат, заключающийся в повышении помехоустойчивости.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2007 |
|
RU2362210C1 |
| СПОСОБ ВЫДЕЛЕНИЯ КОНТУРОВ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2466456C2 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ ВЫСОКОДЕТАЛИЗИРОВАННЫХ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ СЦЕНЫ | 2013 |
|
RU2542876C2 |
| СПОСОБ ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2383925C2 |
| СПОСОБ И УСТРОЙСТВО ДЕТЕКТИРОВАНИЯ ЛОКАЛЬНЫХ ОСОБЕННОСТЕЙ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2535184C2 |
| Устройство для распознавания контуров изображений объектов | 1985 |
|
SU1270781A1 |
| СПОСОБ ПОЛУЧЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ ПОВЕРХНОСТИ ПОРИСТОГО ТЕЛА С ЯРКОСТНЫМ РАЗДЕЛЕНИЕМ ОБЪЕКТОВ И ФОНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2536658C2 |
| Способ автоматического определения ориентации надводных судов с использованием оптико-электронной системы беспилотного летательного аппарата | 2023 |
|
RU2830991C1 |
| БИНОКУЛЯРНОЕ УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ТРОМБОЗА ГЛУБОКИХ ВЕН ГОЛЕНИ | 2006 |
|
RU2305487C1 |
| СПОСОБ СЕГМЕНТАЦИИ СЛОЖНОСТРУКТУРИРОВАННЫХ РАСТРОВЫХ ПОЛУТОНОВЫХ ИЗОБРАЖЕНИЙ НА ОСНОВЕ СОСТАВНЫХ МОРФОЛОГИЧЕСКИХ ОПЕРАТОРОВ | 2012 |
|
RU2510897C2 |
Изобретение относится к области распознавания образов и может быть использовано при решении задач предварительной обработки изображения с целью определения контуров объектов, которые характеризуются монотонностью изменения интенсивности цвета. Технический результат заключается в повышении помехоустойчивости распознания контура изображения за счет оценки скорости и ускорения изменения интенсивности цвета в восьмисвязной окрестности элемента изображения. Предложено устройство для определения контуров объектов в изображении. Устройство содержит датчик элементов изображения и следующие блоки: формирования пороговых значений скорости и ускорения изменения интенсивности элементов изображения, формирования восьмисвязной окрестности элементов изображения, последовательного выделения триад в восьмисвязной окрестности элемента изображения, памяти вышеупомянутых триад, дифференцирования триад, решающий блок. При этом блок формирования пороговых значений скорости и ускорения изменения интенсивности элементов изображения соединен с выходом датчика элементов изображения. Блок формирования восьмисвязной окрестности элементов изображения соединен с выходом блока формирования элементов изображения и соединен с последовательно соединенными блоком последовательного выделения триад в восьмисвязной окрестности элемента изображения, блоком памяти триад восьмисвязной окрестности элемента изображения, блоком дифференцирования триад и решающим блоком. 7 ил.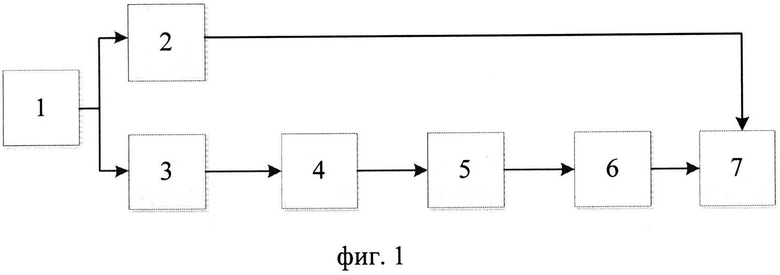
Устройство для определения контуров объектов в изображении, содержащее датчик элементов изображения, отличающееся тем, что введены блок формирования пороговых значений скорости и ускорения изменения интенсивности элементов изображения, вход которого соединен с выходом датчика элементов изображения, и последовательно соединенные блок формирования восьмисвязной окрестности элементов изображения, вход которого соединен с выходом блока формирования элементов изображения, блок последовательного выделения триад в восьмисвязной окрестности элемента изображения, блок памяти триад восьмисвязной окрестности элемента изображения, блок дифференцирования триад и решающий блок, управляющий вход которого соединен с выходом блока формирования пороговых значений скорости и ускорения изменения интенсивности элементов изображения.
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2007 |
|
RU2362210C1 |
| СПОСОБ ВЫДЕЛЕНИЯ КОНТУРОВ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2010 |
|
RU2466456C2 |
| СПОСОБ ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2383925C2 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ КОНТУРОВ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 2000 |
|
RU2185659C1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

