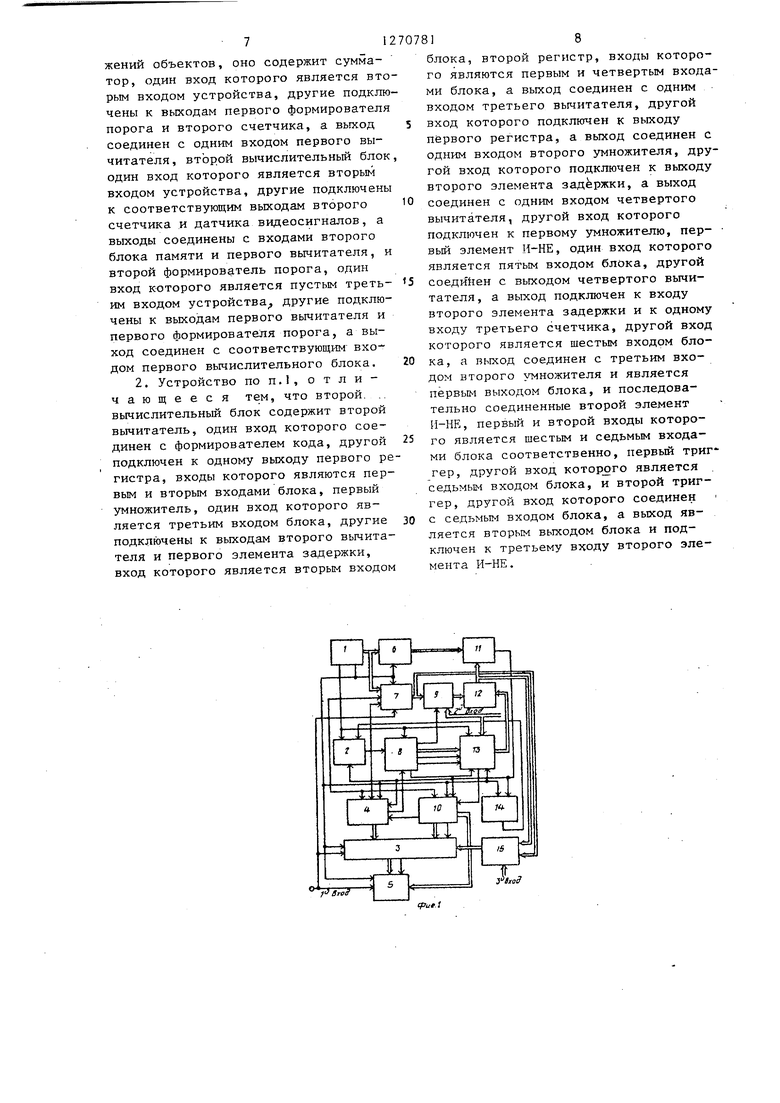
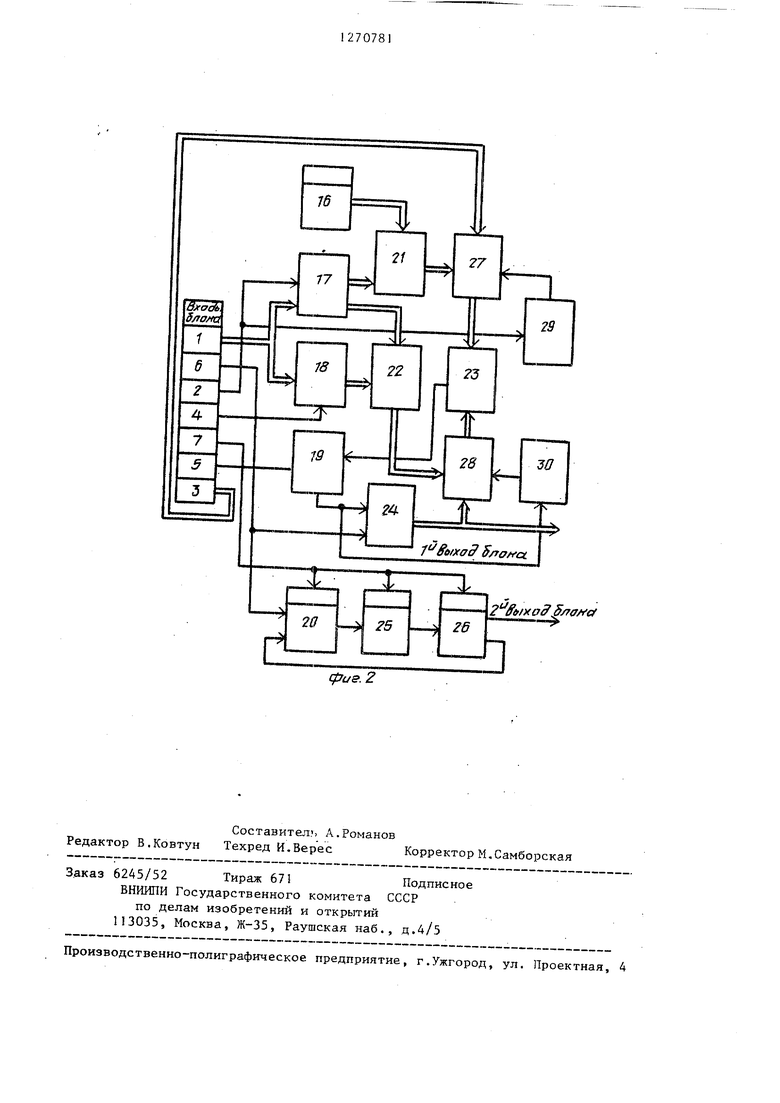
11 Изобретение относится к автомати ке и вычислительной технике и может быть использовано для автоматизации процесса распознавания изображений размерньк объектов по признаку кали чин заданного числа связньк элементов контура изображения объекта. Цель изобретения - повьш1ение достоверности распознавания контуров изображений объектов. На фиг.1 представлена блок-схема устройства; на ,фиг.2 - пример конк ретного конструктивного выполнения второго вычислительного блока. Устройство включает датчик 1 видеосигналов, первый счетчик 2, первый вычислительный блок 3, первый блок 4 памяти, блок 5 регистрации, блок 6 дифференцирования, первый формирователь 7 порога, второй счетчик 8, сумматор 9, второй блок 10 памяти, пороговый элемент 11, первый вычитатель 12, второй вычислительный блок 13, элемент 14 И и второй формирователь 15 порога. Второй вычислительный блок (фиг, содержит формирователь 16 кода, пер ньй 17 и второй 18 регистры, первый 19 и второй 20 элементы И-НЕ, второй 21, третий 22 и четвертый 23 вычитатели, третий 24 счетчик, первый 25 и второй 26 триггеры, первый 27 и второй 28 умножители, первый 2 и второй 30 элементы задержки. Устройство работает следующим об разом. С выхода датчика 1 видеосигнаша в устройство поступают кадровые синхроимпульсы (КСИ), тактовые И1 пульсы (.), присутствуюище только активное время строк телевизионного разложения, т.е. во время прямого хода луча, и параллельный двоичный код видеосигнала, формируемый в ана лого-цифровом преобразователе датчика 1 видеосигнала. Блок 6 производит операцию двумерного дифференцирования сигнала яркости, поступающего на первьй вхо последнего, в апертуре 2x2 растровы элемента и величину оценки двумерно го перепада яркости выдает на выход непрерьшно в течение всего эксперимента. Работа устройства в режиме распо навания контуров изображений объектов начинается с момента появления на первом входе устройства сигнал логической единицы Пуск. Первым в работу включается первый формирователь 7 порога, на выходе которого к концу первого кадра образуется суммарньш сигнал,, являющийся первым эталонным пороговым сигналом. Величина его такова, что при его наличии на втором входе порогового эле-i мента I1, на его выходе выделяется часть элементов контура изображения объекта и отсутствуют связные элементы контура изображения фона. По окончании процесса формирования первого эталонного порогового сигнала на втором выходе формирователя 7 появляется логическая единица (сигнал Конец формирования эталонного порога), поступающая на соответствующий вход блока 4. Начинается второй кадр, за время которого производится запись в блок 4 сигналов от элементов контура изображения объекта и фона, формируемых пороговым элементом 11, реализующим функцию вычитания первого эталонного порогового сигнала из суммарного сигнала двумерного перепада, поступающих соответственно с выходов вьиитателя 12 и блока 6, поскольку на второй вход вычитателя 12 поступает нулевой корректирующий пороговый сигнал с выхода блока 13. После записи начинается цикл корректировки уменьшения первого порогоого эталонного сигнала на втором вхое порогового элемента 11.Первым этапом корректировки является подсчет количества связных элементов контура объекта вдоль строки. Этот подсчет производится счетчиком 2, на первый вход которого поступают сигналы с выхода элемента И 14, который необходим для работы первого счетчика 2, поскольку с выхода элемента поступает сигнал, сврщетельствующий лишь о наличии контура, а не о его протяженности. Появление каждого очередного импульса на выходе счетчика 2 свидетельствует о том, что обнаружена последовательность связных элементов контура изображения объекта и фона вдоль строки, число которых превьпчает заданное. Вторым этапом корректировки (уменьшения) первого эталонного порогового сигнала является подсчет общего числа вьщеленных связных элементов контура изображения объекта и фона. Этот подсчет производится счетчиком 8, на первый вход которог поступает сигнал от групп связных элементов вдоль строки. Подсчет чис ла связных элементов контура изобра жения объекта и фона с точностью до числа элементов в группе и по групп ведется на протяжении активной част кадра. По окончании подсчета общего числа вьщеленных св 1зных элементов контура изображения объекта и фона необходимо переписать состояние счет чи-ка 8 в блок 13. Таким образом, в блоке 13 хранится общее число выделенных связных элементов контура изображения объекта, подсчитанное при первом эталонном пороговом сигнале. На третьем этапе работы устрой ства производится увеличение первого эталонного порогового сигнала, приче значение сигнала положительногоприращения подается с третьего входа устройства одновременно на соответствующиевходы сумматора 9 иблока 13. Увеличенный первый пороговый эталонный сигнал с выхода сумматора 9 поступает на вход вычитателя 12, проходит его без изменений и оказывается на втором входе порогового элемента 11 .Как и на втором этапе ра боты устройства первый счетчик 2 и I второй счетчик 8 производят подсчет общего числа вьщеленных связных элементов контура изображения объекта при увеличенном пороговом эталонном сигнале. Результаты подсчета переписьшаются из счетчика 8 в соответствующий регистр ,блока 1 3 . Таки образом, получена необходимая исходнал информация для расчета уменьшенного порогового эталонного сигнала. Этот расчет осуществляется в блоке 13. Вычисления осуществляют при наличии на втором входе блока 13 стробирующего сигнала, поступающего с выхода счетчика 8 на второй вход рассматриваемого блока. При этом вычита тель 21 вычисляет разность между эталонным числом элемента контура объекта наблюдения-, считываемым с формирователя 16 кода, где оно записывается при подготовке к эксперименту, и числом, поступающим с инверсного вы -хода регистра 17. Первый умножитель 27 перемножает полученную разность и положительное приращение порогового эталонного сигнала. Разность вычис7814ляется аналогично предыдущей с помощью вьтитателя 22. 3ateM осуществляется деление полученной величины на величину разности. Для этого значение разности подается на второй вход умножителя 28, на первьй вход которого поступает значение частного, которое находится путем подсчета счетчиком 24 числа ТИ, поступающих на второй вход элемента И-НЕ 19. Счет ТИ продолжается до того момента, пока произведение сигналов, поступающих на первый и второй входы умножителя 28, не станет равно делимому. Для обнаружения этого равенства используется вычитатель 23. При этом запирается элемент И-НЕ 19, счет прекршцается и на выходе счетчика 24 устанавливается сигнал частного, который равен значению, определяющему уменьшение исходного порогового эталонного сигнала до уменьшенного порогового эталонного сигнала. Блок 13 позволяет (без подсчета общего числа связных элементов контура изображения объекта наблюдения и фона при пониженных по отношению к исходному первому пороговому эталонному сигналу значениях порога) вычислить по данным, полученным при отсутствии связных элементов контура фона (ложных контуров), уменьшенный пороговьш эталонный сигнал, при котором . вероятность обнаружения элементов контура изабраже1ниё объекта близка к единице. В течениетретьего этапа работы устройства на втором выходе . блока 13 вырабатьгоается сигнал разрешения записи для блока памяти 10. Для его формирования используются второй элемент И-НЕ 20, а также триггеры 25 и 26. При появлений на вто- ром выходе второго триггера 26 логического нуля процесс вычислений завершен. Полученное в блоке 13 значение уменьшения порога используется вычитателем 12 для корректировки (уменьшения) первого эталонного порогового сигнала, поступающего на первьш вход последнего. Когда процесс вычислений завершен, начинается четвертый этап работы устройства, при котором осуществляется выделение корректирующих элементов контура изображения объекта и фона путем сравнения абсолютных значений разностей амплитуд сигналов яркости от элементов изображения объекта и фона с уменьшенным пороговым этапонным сигналом. Процесс записи массив сигналов от элементов контура при скор ректированном пороговом эталонном сиг нале в блок памяти 1 О происходит аналогично описанному вьше процессу записи первый блок памяти.По окончании записи в блок памяти 10 на четвертом выходе по следнего появляется уровень логическо единицы, поступающий на первый вход блока памяти 4 и разрешает считывание из последнего, а также из блока памяти 10, где является внутренним сигналом. Начинается пятый этап работы устройства. Считьшание из обоих блоков памяти 4 и 10 производится синхронно. Процесс вычисления плотностей вероят ностей появления корректирующих элементов проводится одновременно со считьшанием сигналов от элементов контуров изображений объектов и. фона из первого блока памяти 4 и из второго блока памяти 10. Вычисление вероятностей появления корректирующих элементов ведется при каждом положении анализирующей апертуры 8 х X 8 элементов и начинается кажл;ьш раз по сигналу, приходящему на третий вход блока 3, на первый и второй входы которого приходят величины сум марных сигналов от элементов контуро соответственно из второго 10 и из первого блоков памяти 4. Нахождение отношения числа корректирующих элеме тов в апертуре к общему числу обнару женных элементов производится в блоке 3 по стандартной схеме сдвига делимого и проверке разряда переноса при вычислении остатка от деления на каждом шаге. Формирователь 15 порога представляет собой преобразователь кодов, w реализованный с помощью программируемого постоянного запоминающего устройства. На выходе формирователя 15 устанавливается одно из заранее определенных значений второго эталон ного порогового сигнала, которое определяется по исходному АЛ и уменьшенному AJ пороговым эталонным сигналам и зависит от эталонного числа градиентных элементов. Результат ср)авнения поступает на первый вход блока 5 и записывается там при наличии разрешения, приходящего с соответствующего разряда регистра блока 10, где находятся значения сигналов отЭлементов контуров, расположенных в центре апертуры. Только при наличи обоих сигналов принима ется решение о наличии элемента кон- тура в данном месте. Таким образом, реализованное в устройстве выделение корректирующих элементов контура изображения объекта и фона и оценка вероятностей обнаружения этих элементов в окрестностях каждого из вьщеленньк элементов контура позволяет без потери элементов зарегистрировать элементы контура изображения объекта и устранить с вероятностью близкой к 1 элементы ложных контуров при заданных отнощениях сигнал/шум. Формула изобретенИ я 1. Устройство для распознавания контуров изображений объектов, содержащее датчик вид.еосигналов,выходы которого подключены к входам блока дифференцирования, первого формирователя порога, первого счетчика, первого и второго блоков памяти, к одному входу элемента И, к одному входу первого вычислительного блока, другой вход которого является первым входом устройства, и к одному входу блока регистрации, другой вход которого является первьм входом устройства, а остальные входы соединены с соответствующими выходами первого вычислительного блока и второго блока памяти, один выход которого подключен к соответствующему входу первого блока памяти, а другие подключены к входам первого вычислительного блока, пороговьй элемент, входы которого соединены с выходами блока дифференцирования и первого вычитателя, а выход подключен.К одному входу первого счетчика, другой вход которого соединен с вьпгодом элемента И, к одному входу первого блока памяти, другой вход которого соединен с выходом первого формирователя порога, а выход соединен с пятым входом первого вычислительного блока, к соответствующему входу второго блока памяти и к другому входу элемента И, и второй счетчик, входы которого соединены с выходами первого счетчика, датчика видеосигналов и первого блока памяти, отличающееся тем, что, с целью повьшения достоверности распознавания контуров изображений объектов, оно содержит сумматор, один вход которого является вторым входом устройства, другие подключены к выходам первого формирователя порога и второго счетчика, а выход соединен с одним входом первого вычитателя, второй вычислительньй блок один вход которого является вторым входом устройства, другие подключены к соответствующим выходам второго счетчика и датчика видеосигналов, а выходы соединены с входами второго блока памяти и первого вычитателя, и второй формирователь порога, один вход которого является пустым третьим входом устройства другие подключены к выходам первого вьгаитателя и первого формирователя порога, а выход соединен с соответствующим входом первого вычислительного блока.
2. Устройство по п.1, о т л и чающееся тем, что второй. .. вьгчислительный блок содержит второй вычитатель, один вход которого соединен с формирователем кода, другой подключен к одному выходу первого регистра, входы которого являются первым и вторым входами блока, первый умножитель, один вход которого является третьим входом блока, другие подключены к выходам второго вычитателя и первого элемента задержки, вход которого является вторым входом
блока, второй регистр, входы которого являются первым и четвертью входами блока, а выход соединен с одним входом третьего вычитателя, другой вход которого подключен к выходу первого регистра, а выход соединен с одним входом второго умножителя, другой вход которого подключен к выходу второго элемента задержки, а выход соединен с одним входом четвертого вычитателя, другой вход которого подключен к первому умножителю, первый элемент Н-НЕ, один вход которого является пятым входом блока, другой соединен с выходом четвертого вычитателя , а выход подключен к входу второго элемента задержки и к одному входу третьего счетчика, другой вход которого является шестым входом блока, а выход соединен с третьим входом второго умножителя и является первым выходом блока, и последовательно соединенные второй элемент Н-НЕ, первый и второй входы которого является шестым и седьмым входами блока соответственно, первый триггер, другой вход которого является седьмьм входом блока, и второй триггер, другой вход которого соединен с седьмым входом блока, а выход яв- . ляется вторым выходом блока и подключен к третьему входу второго элемента И-НЕ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для распознавания контуров изображений объектов | 1985 |
|
SU1359788A2 |
| Устройство для распознавания контуров изображений | 1983 |
|
SU1156103A1 |
| Устройство для выделения изображений подвижных объектов | 1987 |
|
SU1462373A1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ПО ИХ КОНТУРАМ | 1992 |
|
RU2060551C1 |
| Устройство определения координат объекта | 1988 |
|
SU1562980A1 |
| Устройство для нормализации изображений объектов | 1984 |
|
SU1211771A1 |
| Устройство обнаружения и определения координат объекта на изображении | 1990 |
|
SU1737755A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ЭТАЛОННОЙ КАРТЫ МЕСТНОСТИ ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 1992 |
|
RU2022355C1 |
| Устройство для передачи и приема информации | 1987 |
|
SU1449989A1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
-Изобретение относится к устройствам для распознавания контуров изображений объектов. Устройство позволяет существенно повысить достоверность распознавания контуров изображений размерных объектов в условиях низкого контраста изображения и пространственных помех путем введения сумматора, второго вычислительного блока и второго формирователя порога. Решение о наличии или отсутствии элемента контура изображения объекта наблюдения осуществляется вторым пороговым элементом по результатам сравнения вероятности обнаружения корректирующих элементов с вторьм пороговым эталонным сигналом. Оценка этой вероятности для каждого из выделенных элементов контура изображения объекта и фона производится в окрестности .данного элемента внутри анализирующей апертуры 
| Авторское с,видетельство СССР № 760133, кл | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Устройство для распознавания контуров изображений | 1983 |
|
SU1156103A1 |
