Область техники, к которой относится изобретение
Иллюстративные варианты осуществления в целом относятся к системе и способу автоматического детектирования и соединения с вторичным устройством связи с использованием вычислительной системы на базе транспортного средства.
Уровень техники
На данный момент существуют вычислительные системы на базе транспортных средств, которые используют беспроводное соединение - внутри машины с портативным сотовым телефоном или другим мобильным устройством для связи с внешней сетью. В некоторых из данных систем мобильное устройство прикреплено к самой машине. В данных случаях система может быть проинструктирована для связи с устройством и только с тем устройством, которое не конфликтует при связи.
В других системах соединение может быть выполнено с одним из множества доступных устройств. Например, в системе FORD SYNC вычислительная система на базе транспортного средства использует Bluetooth соединение для соединения с телефоном пользователя. Поскольку у машины может быть более чем один водитель или может быть более чем один телефон, с которым необходимо соединиться, пользователь может конфигурировать множество телефонов для использования с SYNC системой.
До тех пор, пока только один телефон находится в зоне действия трансивера системы, это не представляет собой проблему, поскольку системе для выбора доступен только один телефон для соединения. Однако, когда доступно множество телефонов, системе может потребоваться инструкция для определения телефона, который необходимо использовать.
Одним возможным решением является присваивание приоритетов телефонам. Может быть назначен первичный телефон или даже вторичный, третичный и т.д. Если присутствует более одного соединяемого телефона (соединяемые телефоны - это телефоны, которые синхронизируются посредством BlueTooth соединения), система может выбирать телефон, посредством которого соединяться с использованием заданных настроек приоритета. Однако, например, если транспортное средство находится в гараже, при его запуске, оно может соединяться с высокоприоритетным телефоном, оставленным внутри дома. Также, когда транспортное средство покидает зону действия связи с соединенным стационарным телефоном, соединение прерывается, и водителю, возможно, придется вручную инструктировать транспортное средство с целью поиска другого телефона.
Раскрытие изобретения
Согласно одному иллюстративному варианту осуществления, коммуникационная система транспортного средства включает, по меньшей мере, компьютерный процессор, взаимодействующий с памятью. Кроме того, коммуникационная система содержит локальный беспроводной трансивер, взаимодействующий с компьютерным процессором. Трансивер может также быть сконфигурирован таким образом, чтобы беспроводным образом связываться с первым беспроводным устройством и, по меньшей мере, вторым беспроводным устройством.
В данном иллюстративном - варианте осуществления, если процессор определяет, что соединение между трансивером и первым беспроводным устройством было утеряно, процессор функционирует таким образом, чтобы найти сигнал от первого беспроводного устройства. Это может помочь системе определить, присутствует ли еще первое беспроводное устройство.
Процессор также функционирует таким образом, чтобы определить, произошло ли событие перемещения. В данном иллюстративном варианте осуществления событие перемещения представляет собой вторичный сигнал о том, что, возможно, транспортное средство покинуло зону действия ранее подсоединенного (т.е. первого) беспроводного устройства. Процессор также функционирует таким образом, чтобы искать сигнал от второго беспроводного устройства. В данном иллюстративном варианте осуществления если сигнал от второго беспроводного устройства найден, а сигнал от первого беспроводного устройства не найден, то система определяет, что второе устройство доступно, а первое устройство - нет. Кроме того, если произошло событие перемещения, то процессор функционирует таким образом, чтобы обеспечить соединение со вторым беспроводным устройством, поскольку в данном иллюстративном варианте осуществления считается, что транспортное средство покинуло зону действия первого беспроводного устройства.
В другом иллюстративном варианте осуществления событие перемещения может быть любым вторичным событием в зависимости от предпочтительной ситуации тестирования. Поскольку зачастую возможны ситуации, когда сигнал к первому устройству утерян, а сигнал ко второму устройству присутствует (т.е. временная утеря сигнала к устройству), то вторичное событие перемещения в данном иллюстративном варианте осуществления представляет собой меру предотвращения переключения между устройствами во время временной утери сигнала.
Краткое описание чертежей
Другие аспекты и характеристики иллюстративных вариантов осуществления станут очевидными из следующего подробного описания примеров осуществления, если его читать, принимая во внимание сопроводительные графические материалы, в которых:
Фиг.1 показывает иллюстративный пример вычислительной системы на базе транспортного средства;
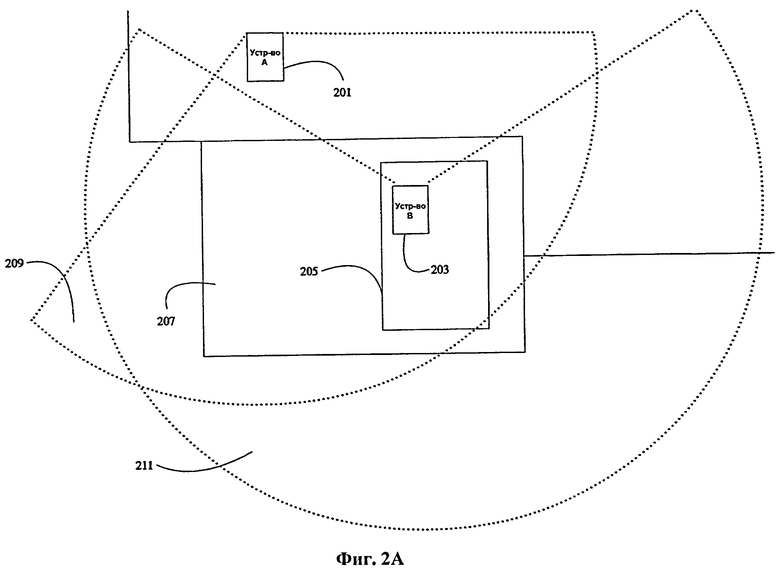
Фиг.2a показывает примерный вид нескольких Bluetooth устройств, находящихся в зоне связи с примерной вычислительной системой на базе транспортного средства;
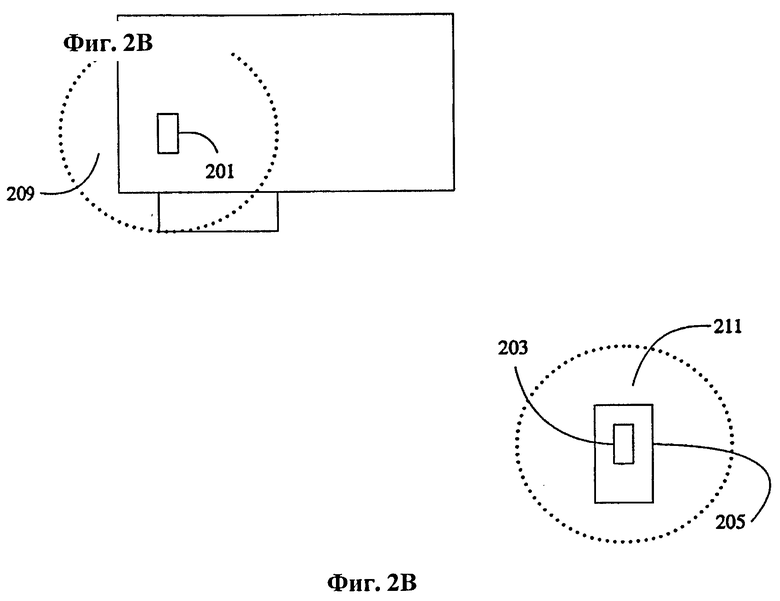
Фиг.2b показывает примерную вычислительную систему на базе транспортного средства согласно ФИГ. 2а, покинувшую зону связи первичного Bluetooth устройства;
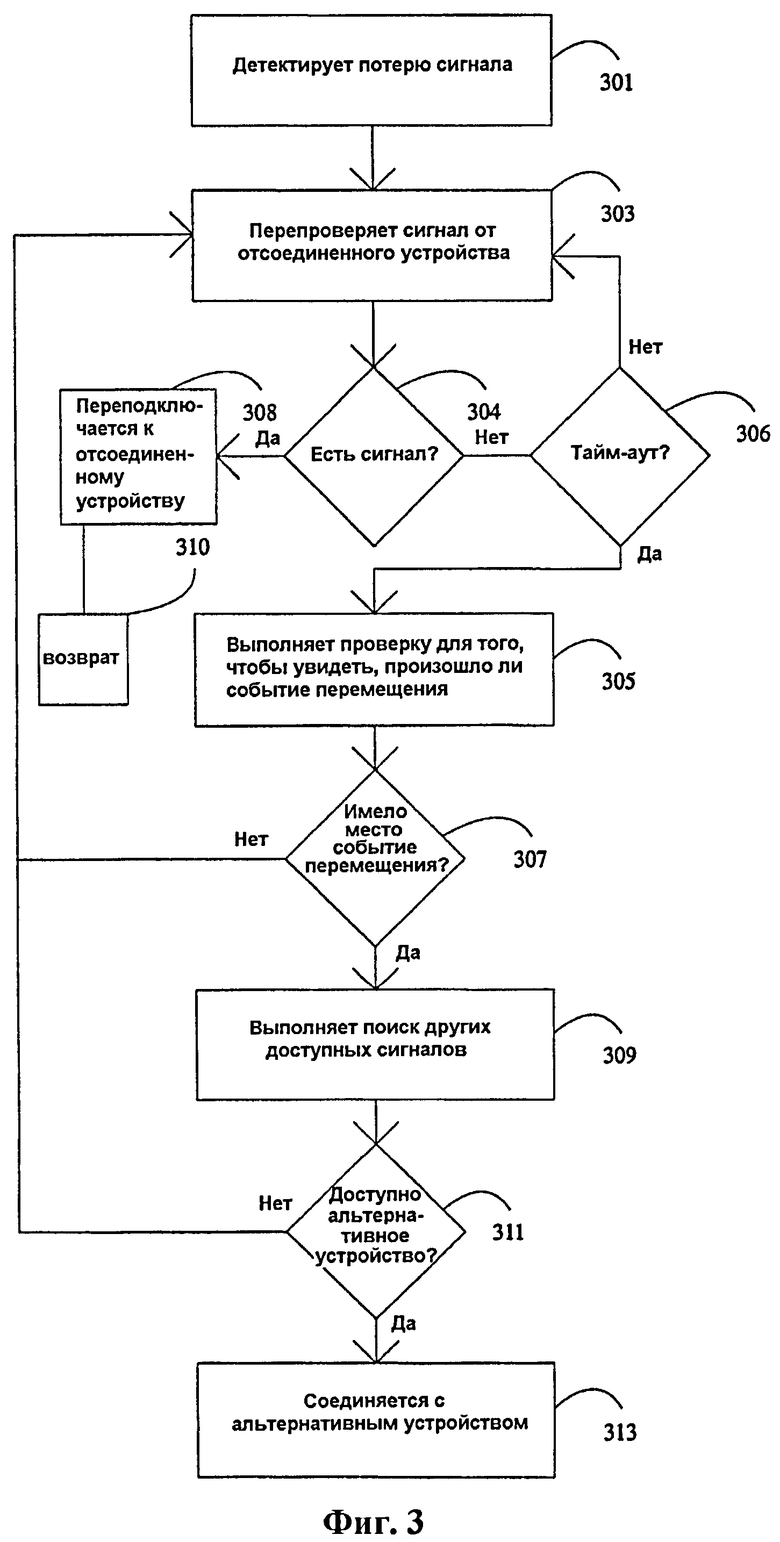
Фиг.3 показывает иллюстративный пример алгоритма для детектирования и соединения с вторичным коммуникационным устройством; и
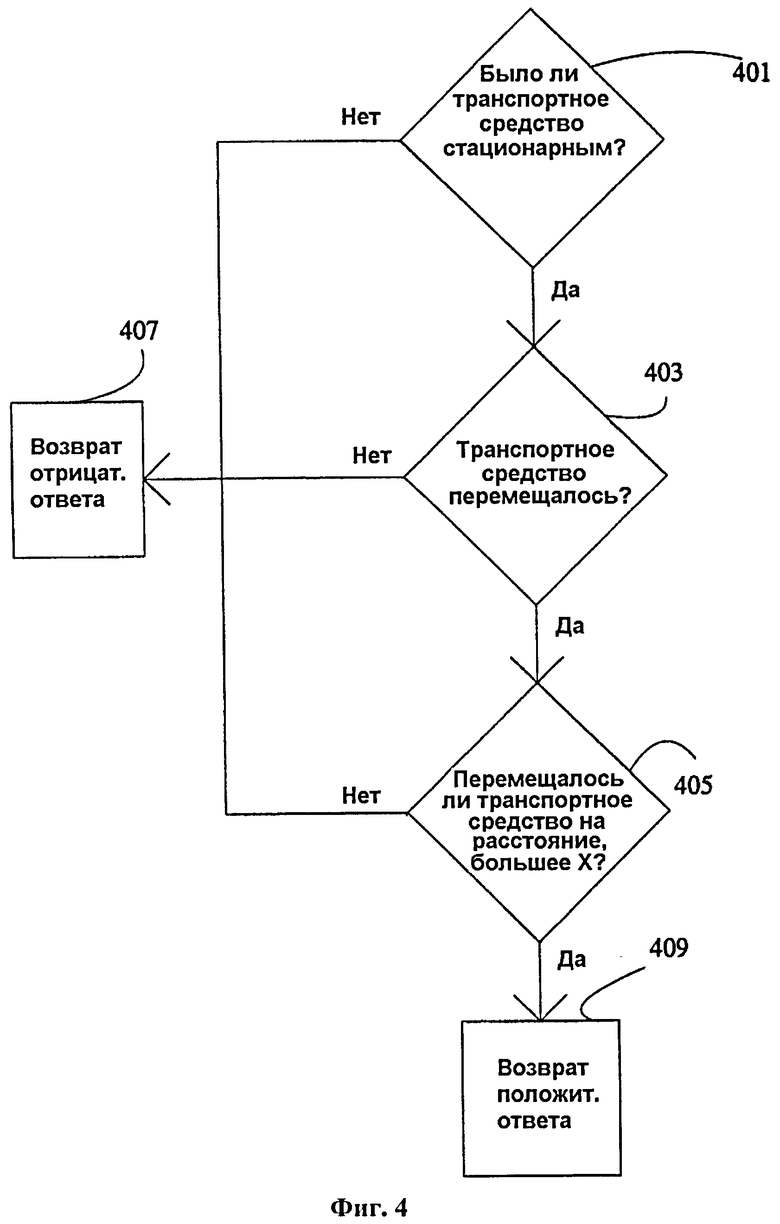
Фиг.4 показывает иллюстративный пример алгоритма для детектирования того, меняло ли транспортное средство состояния движения.
Осуществление изобретения
Данное изобретение описывается здесь в контексте отдельных примерных иллюстративных вариантов осуществления. Однако специалисты среднего уровня поймут, что раскрытые наглядные иллюстративные варианты осуществления можно подвергнуть модификации, расширениям и изменениям, не отступая при этом от истинного объема и основной идеи рассматриваемого в данный момент изобретения. Одним словом, следующие описания приведены исключительно в качестве примеров, и данное изобретение не ограничивается раскрытыми здесь отдельными иллюстративными вариантами осуществления.
Фиг.1 иллюстрирует системную архитектуру иллюстративной бортовой коммуникационной системы, используемой для доставки инструкций к автомобилю. Транспортное средство, к которому подключена вычислительная система на базе транспортного средства, может содержать внешний визуальный интерфейс 4, расположенный в транспортном средстве. Пользователь может также иметь возможность взаимодействовать с интерфейсом, если тот обеспечен, например, сенсорным экраном. В другом иллюстративном варианте осуществления взаимодействие происходит посредством нажатия клавиш, слышимой речи и синтеза речи.
В иллюстративном варианте осуществления 1, показанном на Фиг.1, процессор 3 управляет, по меньшей мере, некоторой долей операций вычислительной системы на базе транспортного средства. Установленный внутри транспортного средства процессор делает возможной бортовую обработку команд и программ. Кроме того, процессор подключен как к непостоянному 5, так и к постоянному запоминающему устройству 7. В этом иллюстративном варианте осуществления непостоянным запоминающим устройством является оперативное запоминающее устройство (ОЗУ), а постоянным запоминающим устройством является накопитель на жестком магнитном диске (НЖМД, HDD) или флэш-память.
Процессор также обеспечен различными устройствами ввода, позволяющими пользователю взаимодействовать с процессором. В данном иллюстративном варианте осуществления предусмотрен микрофон 29, вспомогательный разъем 25 (для устройства ввода 33), USB-разъем 23, устройство ввода GPS 24 и устройство для подключения BLUETOOTH 15. Также предусмотрен коммутатор входов 51, чтобы позволить пользователю попеременно использовать различные устройства ввода. Входной сигнал как с микрофона, так и со вспомогательного конвектора перед передачей процессору преобразовывается из аналоговой формы в цифровую посредством преобразователя 27.
Устройства вывода системы могут включать, но не ограничиваются видеомонитором 4 и динамиком 13 или стереосистемой вывода данных. Динамик подключен к усилителю 11 и получает сигнал от процессора 3 через цифроаналоговый преобразователь 9. Выходные данные также могут быть выведены на такое удаленное BlueTooth устройство, как персональное навигационное устройство 54, или на такое устройство USB, как навигационное устройство транспортного средства 60, двунаправленными потоками данных, обозначенными стрелками 19 и 21 соответственно.
В одном иллюстративном варианте осуществления система 1 использует BlueTooth трансивер 15, чтобы обмениваться 17 информацией с мобильным устройством 53 пользователя (т.е. сотовым телефоном, смартфоном, КПК и т.п.). В таком случае мобильное устройство может быть использовано, чтобы обмениваться 59 информацией с сетью 61 за пределами транспортного средства 31 посредством, например, обмена информацией 55 с сотовой вышкой 57.
Команда на соединение мобильного устройства 53 и трансивера BlueTooth 15 может быть передана посредством клавиши 52 или подобным устройством ввода, что оповестит ЦП о том, что бортовой BlueTooth трансивер будет соединен с BlueTooth трансивером мобильного устройства.
ЦП 3 и сеть 61 могут обмениваться данными, используя, например, абонентский план, «данные поверх голоса» или тональные сигналы DTMF, ассоциируемые с мобильным устройством 53. Альтернативно может быть желательным наличие бортового модема 63, чтобы ЦП 3 и сеть 61 обменивались данными по речевому каналу. В одном иллюстративном варианте осуществления процессор обеспечен операционной системой, включающей интерфейс прикладного программирования (API) для обмена информацией с прикладным программным обеспечением модема. Прикладное программное обеспечение модема может иметь доступ к встроенному модулю или микропрограмме BlueTooth трансивера, чтобы осуществить беспроводное соединение с удаленным BlueTooth трансивером (таким, какой встречается в мобильных устройствах). В другом варианте осуществления мобильное устройство 53 содержит модем для обмена данными по речевому каналу или широкополосному каналу связи. В варианте осуществления «данные поверх голоса» может быть применен метод, известный как частотное мультиплексирование, когда владелец мобильного устройства может разговаривать с помощью устройства, и одновременно может происходить передача данных. В других случаях, когда владелец не пользуется устройством, для передачи данных может использоваться вся полоса пропускания (в одном примере от 300 Гц до 3,4 кГц).
Если у пользователя есть абонентский план, связанный с мобильным устройством, возможно, что абонентский план допускает широкополосную передачу, и система может использовать гораздо более широкую полосу пропускания (ускоряя передачу данных). В еще одном варианте осуществления мобильное устройство 53 заменено устройством сотовой связи (не показано), которое установлено в транспортном средстве 31.
В одном варианте осуществления поступающие данные могут проводиться через мобильное устройство посредством технологии «данные поверх голоса» или определенного абонентского плана, через бортовой BlueTooth трансивер и поступать во внутренний процессор 3 транспортного средства. В случае, например, с определенными временными данными, данные могут храниться на НЖМД или других носителях 7 данных до того времени, пока не исчезнет необходимость в этих данных.
Дополнительные источники, которые могут подключаться к транспортному средству, включают персональное навигационное устройство 54, имеющее, например, USB-соединение 56 и/или антенну 58; или навигационное устройство 60 транспортного средства, имеющее USB-соединение 62 или другое соединение; бортовое GPS-устройство 24 или удаленную навигационную систему (не показано), обладающую подключаемостью к сети 61.
Кроме того, ЦП может обмениваться информацией с множеством других вспомогательных устройств 65. Эти устройства могут подключаться посредством беспроводного 67 или проводного 69 соединения. Кроме того, или альтернативно, ЦП может быть подключен к установленному на транспортном средстве беспроводному маршрутизатору 73, используя, например, WiFi 71 трансивер. Это может позволить ЦП подключаться к удаленным сетям в радиусе действия локального маршрутизатора 73.
Фиг.2А показывает примерный вид нескольких Bluetooth устройств, находящихся в зоне связи с примерной вычислительной системой на базе транспортного средства, размещенной в транспортном средстве 205. Более конкретно транспортное средство 205 содержит трансивер (не показан) как часть вычислительной системы на базе транспортного средства. На Фиг.2А транспортное средство 205 показано стоящим в гараже 207. Первичное Bluetooth устройство 201 находится внутри дома, соединенного с гаражом. Bluetooth устройство 201 имеет коммуникационное поле 209 (показано частично). Коммуникационное поле Bluetooth устройства 201 охватывает транспортное средство 205 и, таким образом, охватывает трансивер транспортного средства. Соответственно, транспортное средство 205 опознает устройство 201 как потенциально возможное устройство для связи.
В то же время водитель входит в систему транспортного средства 205 посредством Bluetooth устройства 203, которое имеет коммуникационное поле 211 (показано частично). Коммуникационное поле 211 также охватывает транспортное средство и трансивер транспортного средства. Соответственно, транспортное средство также опознает вторичное устройство 203 как потенциально возможное устройство для связи.
На данном этапе существует множество устройств, с которыми может соединяться транспортное средство. Если бы оба устройства физически присутствовали в транспортном средстве, пользователь, вероятнее всего, предпочел бы соединение с первичным устройством 201. Однако в данном случае устройство 201 расположено в доме. Когда пользователь покидает зону действия первичного устройства 201, вычислительная система на базе транспортного средства больше не сможет соединяться с устройством 201 и сигнал будет утерян. Фиг.2В показывает примерную вычислительную систему на базе транспортного средства согласно Фиг.2А, покинувшую зону связи первичного Bluetooth устройства. Когда оба устройства 201, 203 находились в зоне связи трансивера транспортного средства, при запуске транспортного средства, как показано на Фиг.2А, система на базе транспортного средства соединялась с первичным устройством. Однако, как только транспортное средство 205 покинуло гараж 207 и вышло из зоны сигнала 209, соединение с первичным устройством было утеряно.
Если не предпринимается попыток соединиться с вторичным устройством, вычислительная система на базе транспортного средства не сможет соединиться с удаленной сетью, поскольку она считает, что соединение до сих пор осуществляется посредством ранее подключенного первичного устройства 201. Вместо этого она продолжает поиск первичного устройства, и, поскольку первичное устройство более не находится в зоне действия, соединение не может быть осуществлено. Водитель может вручную указать соединение, однако это может быть потенциально опасным, в зависимости от обстоятельств вождения.
Кроме того, водитель может не знать, что соединение работает неправильно, до того момента, пока устройство не понадобится. Если необходимы направления или другие важные соединения, такие как вызов скорой помощи, это может представлять собой проблему, поскольку водителю необходимо сначала вручную восстановить соединение со вторым устройством.
Согласно, по меньшей мере, одному иллюстративному варианту осуществления, когда соединение с устройством утеряно, система на базе транспортного средства будет осуществлять один или более шагов для определения того, была ли утеря соединения случайной или же вследствие ситуации, показанной на Фиг.2А и 2В.
Фиг.3 показывает примерный иллюстративный процесс определения утери связи с устройством, а также процесс переподключения к вторичному устройству. Во-первых, вычислительная система на базе транспортного средства детектирует утерю сигнала 301. Как только определяется утеря сигнала, система первым делом перепроверяет сигнал от отсоединенного устройства 303. В данном варианте осуществления данная стадия процесса помогает убедиться в том, что сигнал не был лишь временно утерян, и в том, что первичное (или другое ранее соединенное устройство) не находится все еще в зоне действия и не доступно для соединения. Если сигнал присутствует 304, вычислительная система на базе транспортного средства переподключится к устройству, с которым была утеряна 308 связь, и возвратится к стандартному функционированию 310.
Если сигнал отсутствует, система определит, произошел ли 306 тайм-аут. Это обеспечивает некоторое предварительно заданное временное окно для повторной проверки связи с первичным устройством. Это может быть полезно в том случае, если сигнал временно утерян, или если первичное (или другое ранее подключенное) устройство было выключено и затем включено по каким-либо причинам. Если тайм-аут не произошел, система продолжает проверку предыдущего сигнала. Если тайм-аут произошел, то тогда система выполняет проверку для того, чтобы увидеть, произошло ли событие перемещения (305).
Событие перемещения может быть определено различными способами. По меньшей мере, в одном иллюстративном варианте осуществления вычислительная система на базе транспортного средства определяет, вышло ли транспортное средство из стационарного состояние в нестационарное состояние, как описано относительно Фиг.4. Другие способы детектирования движения также допустимы. Например, в случае, когда сигнал был утерян вследствие выключения питания телефона, транспортное средство могло двигаться все это время. В этом случае система на базе транспортного средства может осуществить детектирование того, что транспортное средство переместилось на определенное расстояние с момента утери сигнала, или система может просто положиться на тот факт, что произошел тайм-аут, независимо от того, перемещалось ли устройство вообще (т.е. устройство, подключенное первым, выключается, когда транспортное средство находится в ожидании на светофоре или застряло в пробке).
В данном иллюстративном варианте осуществления, если событие перемещения не произошло, система возвращается к проверке сигнала от устройства, подключенного первым. Если событие перемещения произошло 307, то вычислительная система на базе транспортного средства проверит другие доступные сигналы. Вероятно, этими сигналами будут сигналы от вторичных или третичных подключенных устройств, которые находятся в зоне действия сигнала. Если доступно альтернативное устройство 311, то вычислительная система на базе транспортного средства соединяется с альтернативным устройством 313. Если альтернативное устройство недоступно, то вычислительная система на базе транспортного средства возвращается к поиску сигнала от ранее отсоединенного устройства.
Фиг.4 показывает примерный иллюстративный неограничивающий процесс детектирования движения транспортного средства. Во-первых, система на базе транспортного средства определяет, находится ли транспортное средство в стационарном состоянии 401 или нет. В данном иллюстративном варианте осуществления данное детектирование может быть выполнено на основании предыдущего состояния транспортного средства. Например, регистрационная система транспортного средства может записывать стационарное/нестационарное состояние транспортного средства при утере сигнала.
Если транспортное средство ранее не находилось в стационарном состоянии в рамках требуемого временного диапазона (т.е. транспортное средство хранит состояние на протяжении двадцати секунд, при этом транспортное средство не имеет записи касательно стационарного состояния на протяжении последних двадцати секунд), то в данном иллюстративном варианте осуществления процесс возвращает отрицательный ответ 407, указывающий на то, что транспортное средство ранее не находилось в стационарном состоянии на протяжении последних N (т.е. предварительно заданного времени для сохранения состояния) минут/секунд/и т.д. Если транспортное средство находилось в стационарном состоянии, то затем процесс определяет, перемещалось 403 ли транспортное средство. Например, если транспортное средство находится в стационарном состоянии и не перемещалось, но сигнал был утерян, то тогда существует умеренная вероятность того, что утеря сигнала была вызвана некоторым фактом, отличным от перемещения транспортного средства из зоны беспроводного доступа или соединенного первым устройства. Соответственно, процесс возвращает отрицательный результат 407. Однако если транспортное средство перешло из стационарного состояния, то существует умеренная вероятность того, что утеря сигнала была вызвана перемещением транспортного средства из зоны беспроводного доступа. Соответственно, процесс продолжает проверку того, насколько далеко переместилось транспортное средство (405).
Опять же, если транспортное средство переместилось лишь на несколько футов, то существует умеренная вероятность того, что утеря сигнала была вызвана чем-то отличным от вертикального перемещения из зоны беспроводного доступа. Однако, если транспортное средство переместилось более чем на определенное (за известную максимальную зону беспроводного доступа или другую подходящую предопределенную величину), то тогда существует существенная вероятность того, что утеря сигнала была вызвана перемещением транспортного средства из зоны беспроводного доступа ранее соединенного устройства. Соответственно, процесс возвращает положительный результат 409, указывающий на то, что транспортное средство находилось в стационарном состоянии и теперь перемещается на определенное расстояние от его предыдущего стационарного положения.
Данный иллюстративный вариант осуществления относится к случаю, когда транспортное средство находится в стационарном состоянии, соединено с устройством, находящемся за пределами транспортного средства, и затем перемещается на расстояние от стационарного положения за пределы действия устройства. Однако предвидятся многочисленные другие причины продолжительного отсутствия соединения с соединенным первым устройством, и данное изобретение не ограничивается указанием примерной ситуации, описанной в данном описании. Скорее необходимо охватить все предвиденные ситуации, при этом в объем изобретения входят все модификации примерных процессов, показанных в данном описании, относящиеся к различным ситуациям. Как указывалось ранее, данные модификации могут включать, но этим не ограничиваются, систему, которая пропускает стадию определения перехода из стационарного состояние в состояние движения, и систему, которая пропускает детектирование перемещения вообще.
Несмотря на то, что изобретение было описано в связи с тем, что в настоящий момент рассматривается как наиболее целесообразные и предпочтительные варианты осуществления, следует понимать, что изобретение не должно ограничиваться раскрытыми вариантами осуществления, а, напротив, рассчитано охватить разнообразные модификации и эквивалентные схемы, включенные в сущность и объем прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ ОБЕСПЕЧЕНИЯ БЕСПРОВОДНОГО СЕТЕВОГО СОЕДИНЕНИЯ | 2010 |
|
RU2541913C2 |
| СЕТЬ ДОСТАВКИ УСЛУГ | 2011 |
|
RU2542577C2 |
| УСТРОЙСТВО ДЛЯ ПОМОЩИ ВОДИТЕЛЮ | 2011 |
|
RU2531564C2 |
| СИСТЕМЫ И СПОСОБЫ РЕГУЛИРОВАНИЯ УПРАВЛЕНИЯ ИНФОРМАЦИОННО-РАЗВЛЕКАТЕЛЬНОЙ СИСТЕМОЙ АВТОМОБИЛЯ | 2011 |
|
RU2574869C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ГИПЕРЛАПС-ВИДЕО И СОЦИАЛЬНЫЕ СЕТИ | 2016 |
|
RU2725843C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОСТАВЛЕНИЯ ПОИСКОВОЙ ИНФОРМАЦИИ ОБЪЕКТА | 2015 |
|
RU2636140C2 |
| СИСТЕМА И СПОСОБ АВТОМАТИЧЕСКОГО ХРАНЕНИЯ И ИЗВЛЕЧЕНИЯ ИНФОРМАЦИИ О ЧРЕЗВЫЧАЙНОЙ СИТУАЦИИ | 2010 |
|
RU2528154C2 |
| СПОСОБ И СИСТЕМА БЕСПРОВОДНОЙ СВЯЗИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2558670C2 |
| ОБРАБОТКА ДАННЫХ В БЕСПРОВОДНОЙ СЕТИ | 2002 |
|
RU2297101C2 |
| ПОРТАТИВНОЕ УСТРОЙСТВО И СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ МЕДИЦИНСКИХ ДАННЫХ | 2002 |
|
RU2336906C2 |
Изобретение относится к сетям беспроводной связи, а именно к системе и способу автоматического детектирования и соединения с вторичным устройством связи с использованием вычислительной системы на базе транспортного средства. Технический результат заключается в автоматизации выбора беспроводного устройства, через которое осуществляется соединение с внешней сетью, при наличии возможности одновременного доступа к нескольким беспроводным устройствам. Технический результат достигается за счет способа и устройства для соединения вычислительной системы на базе транспортного средства с беспроводным устройством. Если питание вычислительной системы на базе транспортного средства включено, она может изначально соединяться с беспроводным устройством. Если система покидает зону действия данного устройства, соединение может быть утеряно. Однако может присутствовать вторичное устройство, и при этом может быть предпочтительно автоматическое соединение с данным устройством таким образом, что вычислительная система на базе транспортного средства может продолжать работать. 2 н. и 17 з.п. ф-лы, 5 ил.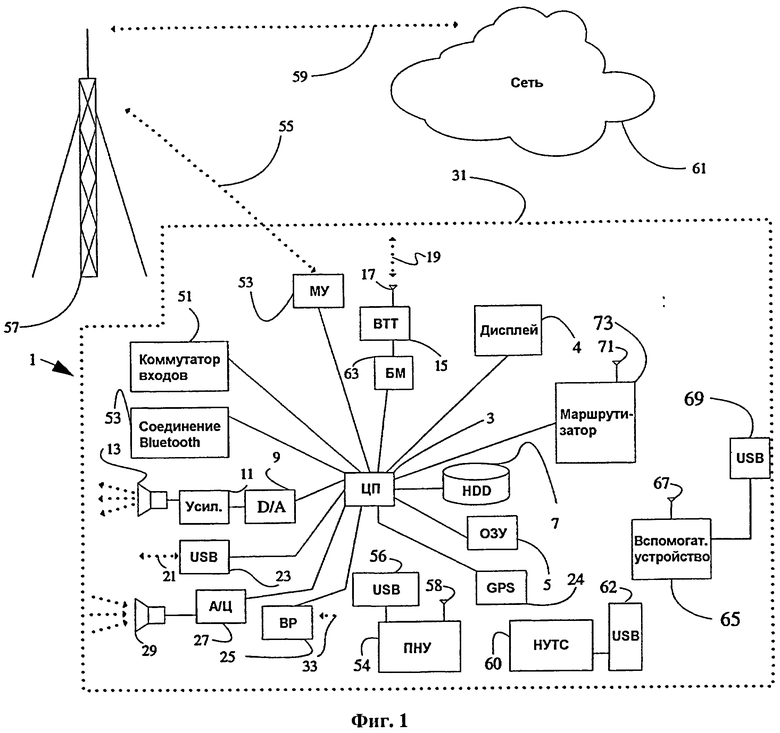
1. Коммуникационная система транспортного средства, содержащая: компьютерный процессор, взаимодействующий с памятью; локальный беспроводной трансивер, взаимодействующий с компьютерным процессором и выполненный с возможностью беспроводным образом соединяться с первым беспроводным устройством и, по меньшей мере, вторым беспроводным устройством;
при этом процессор выполнен с возможностью определять, что соединение между трансивером и первым беспроводным устройством было утеряно, и если определено, что соединение утеряно, автоматически осуществлять поиск сигнала от первого беспроводного устройства в течение заданного периода времени, и если сигнал найден, переподключить первое беспроводное устройство;
в которой процессор выполнен с возможностью по истечении указанного периода времени определять, что произошло перемещение транспортного средства из зоны действия первого беспроводного устройства, основываясь на возникновении, по меньшей мере, одного предопределенного условия, и если перемещение произошло, автоматически осуществлять поиск сигнала от второго беспроводного устройства; причем если сигнал от первого беспроводного устройства не найден, событие перемещения транспортного средства произошло, а сигнал от второго беспроводного устройства найден, то процессор функционирует таким образом, чтобы обеспечить соединение со вторым беспроводным устройством.
2. Система по п.1, отличающаяся тем, что поиск сигнала от первого беспроводного устройства осуществляется в течение фиксированного периода времени, и при этом процессор функционирует таким образом, чтобы обеспечивать соединение со вторым беспроводным устройством по истечении фиксированного периода времени.
3. Система по п.2, отличающаяся тем, что событие перемещения предусматривает переход транспортного средства из стационарного состояния в состояние движения,
4. Система по п.3, отличающаяся тем, что если процессор определяет, что соединение между трансивером и первым беспроводным устройством было утеряно, процессор функционирует таким образом, чтобы дать инструкцию на сохранение в памяти состояния движения транспортного средства.
5. Система по п.4, отличающаяся тем, что по истечении фиксированного периода времени процессор функционирует таким образом, чтобы сравнивать сохраненное состояние движения с текущим состоянием движения таким образом, чтобы определить, перешло ли транспортное средство из стационарного состояния в состояние движения.
6. Система по п.5, отличающаяся тем, что если процессор определяет, что соединение между трансивером и первым беспроводным устройством было утеряно, процессор функционирует таким образом, чтобы дать инструкцию на сохранение в памяти показаний одометра.
7. Система по п.6, отличающаяся тем, что по истечении фиксированного периода времени процессор функционирует таким образом, чтобы сравнивать текущие показания одометра с сохраненными показаниями одометра для определения того, насколько далеко транспортное средство переместилось с момента утери соединения.
8. Система по п.2, отличающаяся тем, что событие перемещения включает в себя перемещение транспортного средства на определенное расстояние.
9. Система по п.8, отличающаяся тем, что если процессор определяет, что соединение между трансивером и первым беспроводным устройством было утеряно, процессор функционирует таким образом, чтобы дать инструкцию на сохранение в памяти показаний одометра.
10. Система по п.9, отличающаяся тем, что по истечении фиксированного периода времени процессор функционирует таким образом, чтобы сравнивать текущие показания одометра с сохраненными показаниями одометра для определения того, насколько далеко транспортное средство переместилось с момента утери соединения.
11. Способ автоматического соединения беспроводного устройства между коммуникационной системой транспортного средства и альтернативным беспроводным устройством, при этом коммуникационная система транспортного средства содержит компьютерный процессор, взаимодействующий с памятью, и локальный беспроводной трансивер, взаимодействующий с компьютерным процессором и сконфигурированный таким образом, чтобы соединяться беспроводным образом с первичным беспроводным устройством и альтернативным беспроводным устройством, при этом способ содержит следующие стадии, на которых:
определяют, что соединение между трансивером и первичным беспроводным устройством было утеряно;
выполняют поиск сигнала от первичного беспроводного устройства; определяют, произошло ли перемещение транспортного средства; выполняют автоматический поиск сигнала от альтернативного беспроводного устройства в течение заданного периода времени; и если сигнал найден, переподключают первичное беспроводное устройство;
по истечении указанного периода времени определяют, произошло ли перемещение транспортного средства; и
если сигнал от первого беспроводного устройства не найден, перемещение транспортного средства произошло, а сигнал от второго беспроводного устройства найден, обеспечивают соединение с альтернативным беспроводным устройством.
12. Способ по п.11, в котором поиск сигнала от первичного беспроводного устройства осуществляют в течение фиксированного периода времени, при этом обеспечение соединения с альтернативным беспроводным устройством происходит по истечении фиксированного периода времени.
13. Способ по п.12, в котором событие перемещения предусматривает переход транспортного средства из стационарного состояния в состояние движения.
14. Способ по п.13, в котором дополнительно предусматривают сохранение в памяти состояния движения транспортного средства, если обнаружено, что соединение между трансивером и первым беспроводным устройством было утеряно.
15. Способ по п.14, в котором дополнительно сравнивают сохраненные состояния движения с текущим состоянием движения таким образом, чтобы определить, перешло ли транспортное средство из стационарного состояния в состояние движения по истечении фиксированного периода времени.
16. Способ по п.15, в котором дополнительно предусматривают сохранение показаний одометра в памяти, если процессор определяет, что соединение между трансивером и первым беспроводным устройством было утеряно.
17. Способ по п.16, в котором дополнительно сравнивают текущие показания одометра с сохраненными показаниями одометра для определения, насколько далеко транспортное средство переместилось с момента утери соединения.
18. Способ по п.12, в котором событие перемещения предусматривает перемещение транспортного средства на определенное расстояние.
19. Способ по п.18, в котором дополнительно:
сохраняют показания одометра в памяти, если процессор определяет, что соединение между трансивером и первым беспроводным устройством было утеряно; и
сравнивают текущие показания одометра с сохраненными показаниями одометра для определения, насколько далеко транспортное средство переместилось с момента утери соединения по истечении фиксированного периода времени.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| US 6505114 В2, 07.01.2003 | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Трехшарошечное долото с продольным и поперечным расположением зубцов на шарошках | 1949 |
|
SU80296A1 |

