Изобретение относится к медицине и медицинской технике, а именно к стоматологии, и может быть использовано для лечения и профилактики заболеваний, вызванных патогенной микрофлорой, в частности кариеса.
Известен зубной бур, содержащий рабочую поверхность, включающую режущие элементы, выполненные с возможностью отклонения, деформирования или истирания при контакте с материалом заданной твердости (см. патент RU №2286744, кл. А61С 3/02, опубл. в 2005 г.). Известное устройство предназначено для использования в низкоскоростных машинах и решает задачу снижения болезненности сверления за счет мягкости режущих кромок бура.
Известно светодиодное устройство для лечения глубокого кариеса зубов, содержащее источник излучения, расположенный на конце держателя Г-образной формы, источник питания, генератор импульсов и переключатель частоты импульсов излучения, а держатель выполнен в виде устойчивой конструкции, повышающей точность воздействия (см. полезную модель RU №83418, кл. А61N 5/06, опубл. в 2008 г.). Известное устройство направлено на повышение эффективности и безболезненности лечения кариеса, однако не рассматривает задачи увеличения комфортности пациента при повышении точности манипуляций стоматолога во время обработки зуба.
Известен держатель инструмента, содержащий рукоятку и рабочую головку с инструментом, снабженный источником света различной длины волны и имеющий световод, размещенный внутри рукоятки, один конец которого связан с рабочей головкой, выполненной из оптически прозрачного материала, а другой с источником света, при этом на торцевой поверхности рабочей головки установлен крепежный элемент для инструмента, по периметру которого имеется открытый участок для прохождения светового потока, а в рукоятке установлен второй световод, соединенный с окуляром для визуального контроля за лечебным вмешательством (см. патент RU №2040225, кл. А61С 5/04, опубл. в 1995 г.). Известное устройство направлено на повышение эффективности проведения эндодонтического вмешательства преимущественно на жевательных зубах (молярах) одновременно с перманентным визуальным контролем за ходом вмешательства. Однако в этом техническом решении не рассмотрен вопрос повышения точности манипуляций стоматолога во время обработки зуба.
Известен способ обработки эмали и дентина зуба, включающий промывку и облучение зуба импульсным лазерным излучением в режиме свободной генерации, и устройство обработки эмали и дентина зуба, содержащее импульсный лазер, блоки питания и управления импульсным лазером, средство доставки лазерного излучения к зубу, выполненное в виде оптического волокна или системы оптических элементов и наконечника со сменными насадками, отличающееся тем, что длина волны излучения лазера находится в диапазоне (0,3-1,3 мкм, 1,6-2,8 мкм, 3,2-9,6 мкм), блок управления соединен с блоком питания через таймер, а насадки к наконечнику выполнены светораспределительными с функцией защиты от облучения окружающих тканей полости рта (см. патент RU №2127137, кл. А61N 5/06, 1999 г.). Эти технические решения относятся к передовым лазерным технологиям, но имеют свои ограничения в применении и не решают вопроса дистанционного управления обрабатывающей головкой (наконечника со сменными насадками).
Известна портативная стоматологическая установка, расположенная в кейсе и снабженная зубоврачебными инструментами с питанием от батарей (см. международный патент № WO 2006/098973, кл. А61С 1/00, опубл. в 2006 г.). Эта компактная установка предназначена для переноски и перевозки и последующей работы в любом месте методом ручной обработки зуба, однако в устройстве не предусмотрено дистанционное управление обработкой зуба и использование зубных вставок с инструментом.
Наиболее близкими техническими решениями являются устройство для лечения зубов, содержащее основание со средством для его закрепления в полости рта пациента в фиксированном положении относительно подлежащего лечению зуба, зубоврачебный инструмент, соединенный с указанным основанием с обеспечением перемещения инструмента и с поддержкой относительно основания, направляющее средство для регулирования перемещения инструмента в пределах заданного участка, причем устройство содержит блок зубной вставки, содержащий готовую зубную вставку, направляющую колодку, образующую направляющий участок, а форма вставки соответствует форме направляющего участка, в результате чего при использовании зубоврачебного инструмента, совершающего перемещение, определяемое направляющим участком, вставка входит в подготовленную полость, а также способ лечения зуба в полости рта пациента, включающий этапы установки основания в полости рта пациента в фиксированном положении относительно подлежащего лечению зуба, присоединения зубоврачебного инструмента к основанию, причем соединение между основанием и зубоврачебным инструментом обеспечивает возможность перемещения инструмента с поддержкой по неограниченной траектории относительно зуба, выполнение лечения посредством перемещения инструмента с поддержкой и управления им, причем способ предусматривает этапы определения, по меньшей мере, одной характеристики указанного зуба, которая представляет собой положение и приблизительную форму подлежащего удалению вещества зуба, определения, на основе выявленных характеристик зуба, размеров и формы соответствующей зоны - рабочей зоны, в которой предстоит оперировать зубоврачебным инструментом, установки поддерживающего основания в полости рта пациента в фиксированном положении относительно указанного зуба, присоединения указанного инструмента к указанному основанию таким образом, чтобы указанное соединение обеспечивало возможность перемещения инструмента с поддержкой и оперирования указанным инструментом в пределах указанной рабочей зоны, обработки зуба с помощью указанного инструмента, главным образом, с целью очистки заданной рабочей зоны (см. опубликованную заявку RU №2003115421, кл. А61С 1/00, опубл. в 2004 г., а также опубликованную заявку РСТ № WO 02/34154, кл. А61С 1/00, опубл. в 2002 г.). Известные устройство и способ лечения предполагают использование шаблонной полости и направляющего инструмента типа пантографа с джойстиком для управления зубоврачебным инструментом. В заявке предусмотрено использование устройства для формирования изображения для получения информации о подлежащем лечению зубе, причем указанная информация содержит сведения о положении инструмента относительно указанного основания, средство для определения положения указанного инструмента относительно подлежащего лечению зуба, компьютерную систему, обеспечивающую импорт указанных данных с целью формирования цифрового геометрического представления указанного зуба с позиционными координатами относительно указанного основания. Это достаточно сложное с точки зрения механики устройство не может обеспечить высокую точность обработки участка зуба, т.к. использование пантографа при передаче движения дает высокую, недопустимую в стоматологии степень погрешности.
Настоящее изобретение направлено на решение технической задачи повышения эффективности способа обработки зубов и универсальности портативной установки при высокой точности движения стоматологических инструментов и уменьшении степени травматичности обработки здоровых тканей зуба за счет использования системы дистанционного управления в сочетании с компьютерным динамическим моделированием увеличенных размеров зоны обработки.
Решение поставленной технической задачи достигается тем, что в способе особо точной обработки зубов, включающем осмотр полости рта пациента, определение пораженного участка и подбор капы для выбранного зуба, установку и фиксацию капы, оснащенной зубоврачебным инструментом с приводом и видеокамерой, последующее соединение привода с компьютерной системой управления, оснащенной наружным манипулятором, при этом располагают капу таким образом, чтобы видеокамера показывала изображение пораженного участка и положение зубоврачебного инструмента на мониторе компьютера, причем изображение с видеокамеры увеличивают, затем, управляя наружным манипулятором с использованием получаемого на мониторе изображения, дистанционно осуществляют микроточную обработку пораженного участка, причем посредством наружного манипулятора управляют движением зубоврачебного инструмента. Перед работой манипулятора формируют динамичную трехмерную модель зуба с пораженным участком, связанную через систему управления с движением манипулятора и с изображением видеокамеры, а затем точечным прикосновением зубоврачебного инструмента к пораженному участку посредством управления наружным манипулятором формируют модель обработки пораженного участка методом программирования по точкам. Посредством манипулятора и динамичной трехмерной модели зуба осуществляют фрезерование пораженного участка. Посредством манипулятора и динамичной трехмерной модели зуба осуществляют лазерную обработку пораженного участка. Посредством манипулятора и динамичной трехмерной модели зуба осуществляют светооптическую обработку пораженного участка.
А также тем, что в портативной установке с дистанционным управлением малогабаритного устройства для обработки зубов, включающей систему управления, зубоврачебный инструмент, установленный в малогабаритном устройстве для обработки зубов и связанный с наружным манипулятором посредством системы управления, малогабаритное устройство для обработки зубов снабжено видеокамерой, установленной в непосредственной близости к зубоврачебному инструменту и связанной с монитором компьютера, причем малогабаритное устройство для обработки зубов выполнено в виде набора кап разного размера и формы, предназначенных для разных условий обработки. Установка снабжена кейсом, а монитор компьютера, система управления, наружный манипулятор и набор кап разного размера и формы в разобранном виде расположены в кейсе установки. Установка снабжена средствами для формирования динамичной трехмерной модели зуба. Средства для формирования динамичной трехмерной модели зуба расположены в кейсе установки. Установка снабжена дополнительным монитором для пациента. Капа снабжена верхним и нижним защитными прокладками для установки на противолежащие зубы пациента. Капа выполнена миниатюрной односторонней, а привод головки зубоврачебного инструмента выполнен в виде гексапода. Капа снабжена дополнительной криволинейной направляющей для перестановки привода головки зубоврачебного инструмента. Капа выполнена миниатюрной односторонней и снабжена кареткой перемещения головки зубоврачебного инструмента с линейными приводами, а также снабжена двумя разнесенными по длине криволинейными направляющими перемещения каретки. Капа выполнена миниатюрной односторонней с приводом головки зубоврачебного инструмента в виде гексапода, установленной на каретке перемещения, и снабжена двумя разнесенными по длине криволинейными направляющими каретки. Капа выполнена миниатюрной односторонней с приводом головки зубоврачебного инструмента в виде гексапода, установленной на консольной продольной прямолинейной направляющей, и снабжена криволинейной направляющей для перемещения консольной продольной прямолинейной направляющей. Капа выполнена двухсторонней универсальной и снабжена сегментными упорными кожухами для зубов, связанными между собой передними опорами и задней обечайкой, при этом привод головки зубоврачебного инструмента расположен внутри полоти рта пациента, связан с сегментными упорными кожухами и выполнен в виде трипода. Капа выполнена двухсторонней универсальной и снабжена сегментными упорными кожухами для зубов, связанными между собой передней монтажной обечайкой, снабженной монтажным кронштейном привода головки зубоврачебного инструмента, выполненного в виде трипода. Капа выполнена двухсторонней универсальной и снабжена полукруглыми упорными кожухами для зубов, связанными между собой передним монтажным кронштейном и задней обечайкой, при этом привод головки зубоврачебного инструмента выполнен в виде трипода с наружным расположением. Привод головки зубоврачебного инструмента в виде гексапода включает шесть линейных двигателей, выполненных в виде коаксиально расположенных роторов и статоров, связанных проушинами с головкой зубоврачебного инструмента и сферическими опорами с кареткой перемещения. Привод головки зубоврачебного инструмента в виде трипода включает консольно расположенные под острым углом к головке зубоврачебного инструмента три линейных двигателя, снабженные промежуточной опорой в виде монтажного кронштейна.
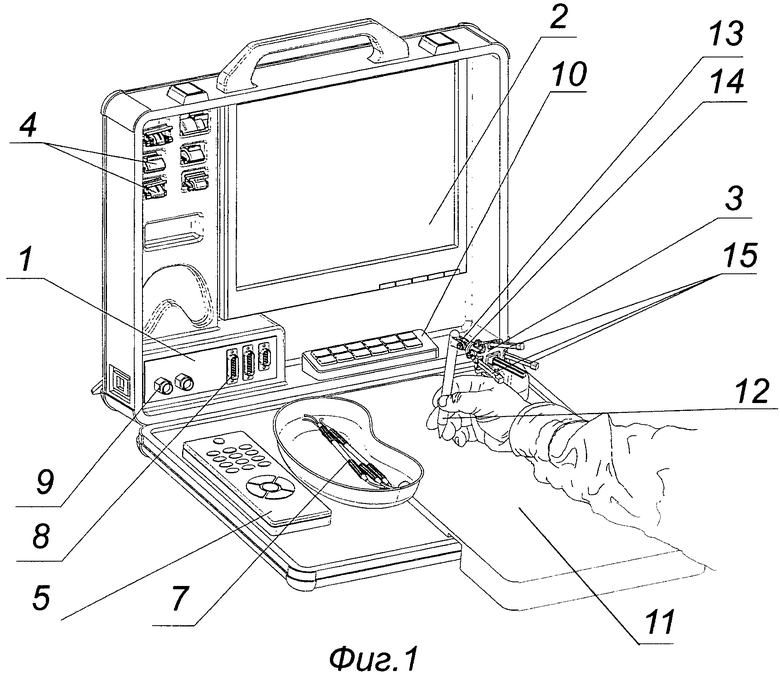
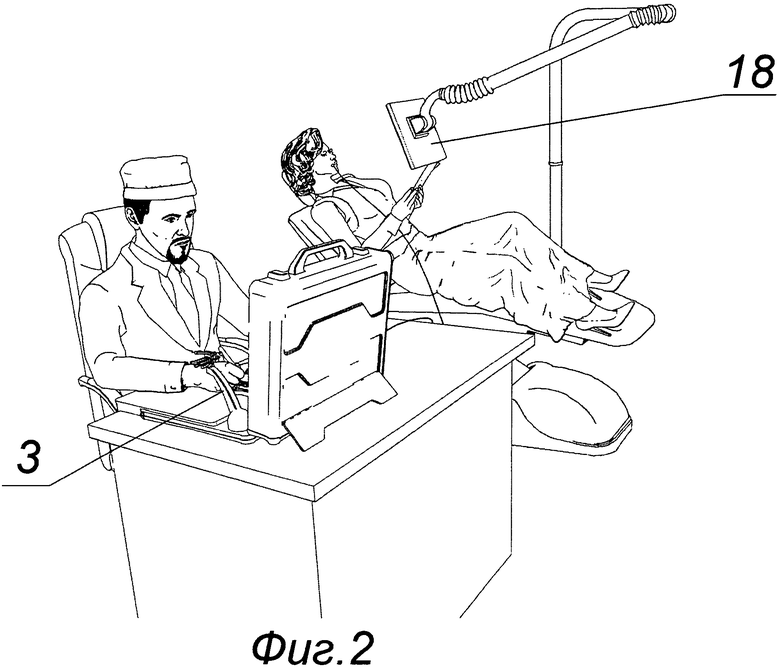
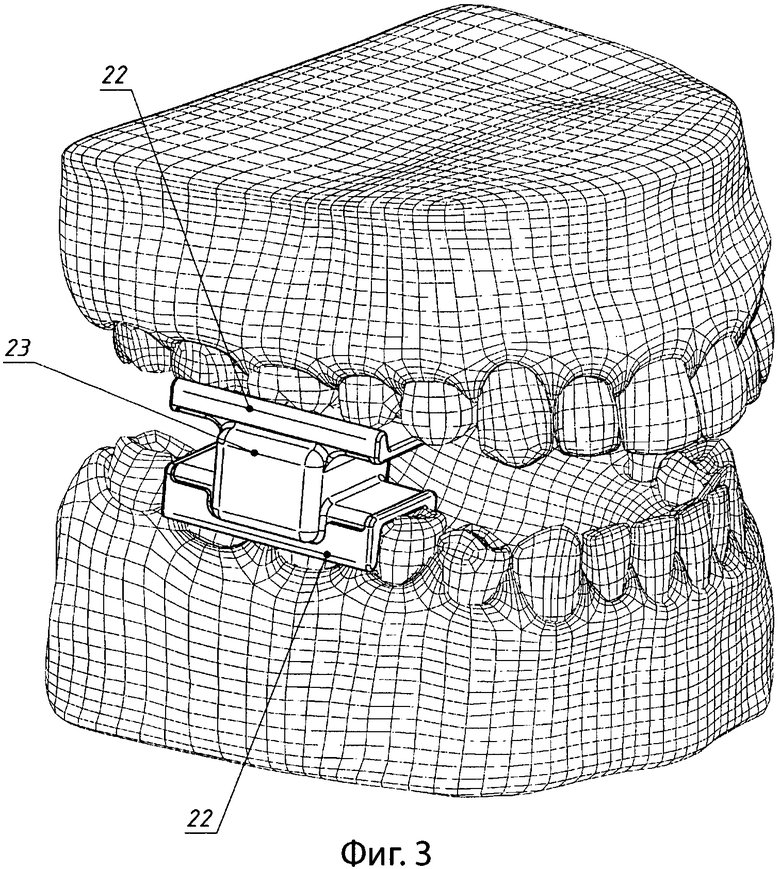
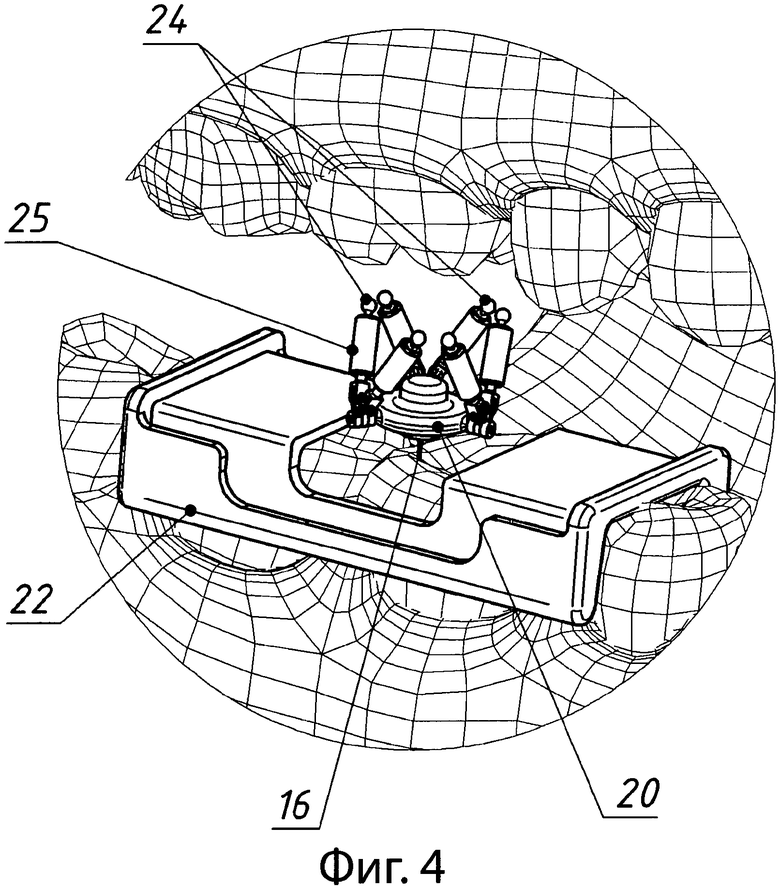
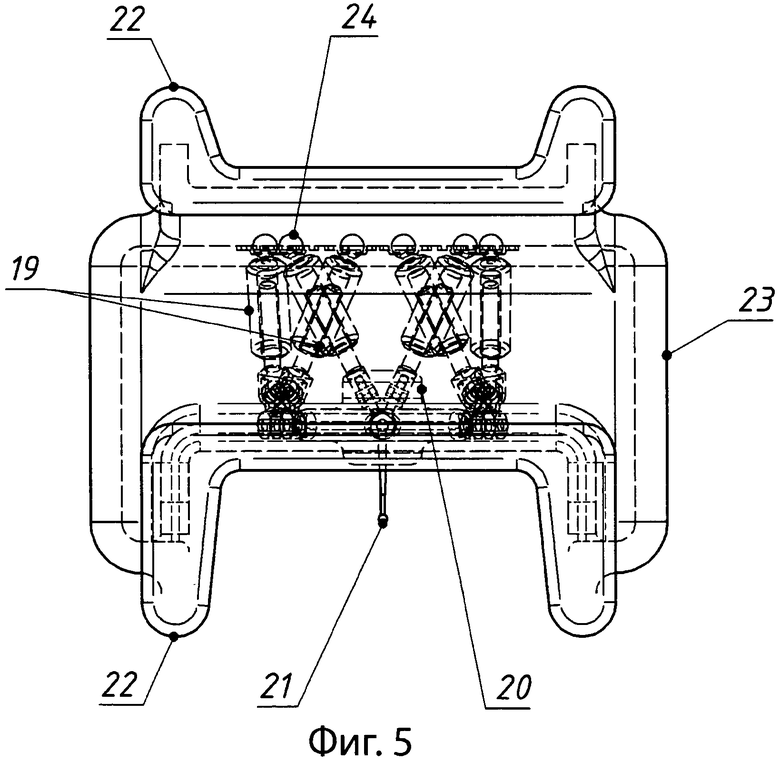
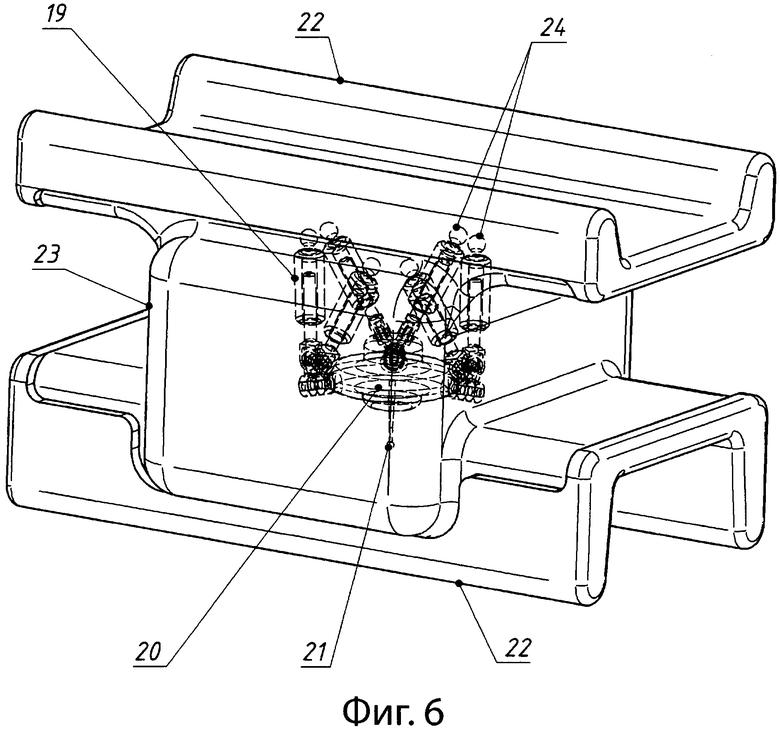
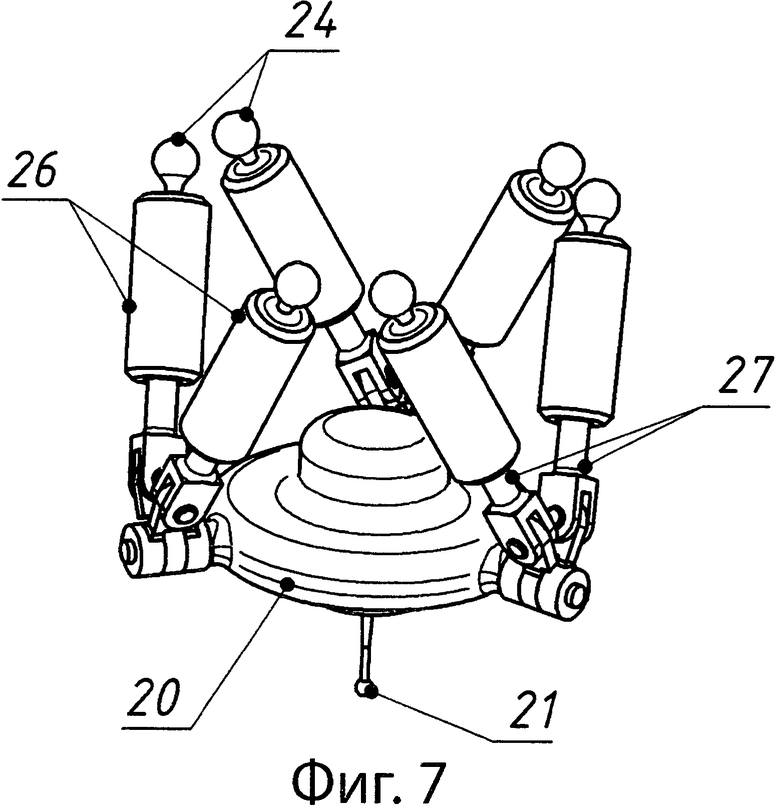
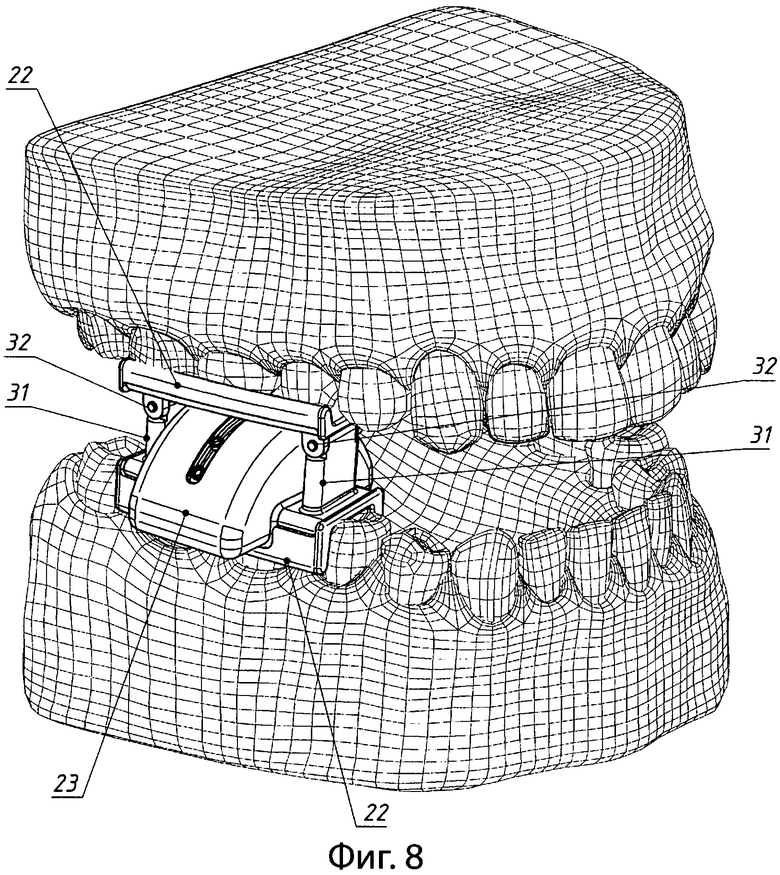
Изобретение поясняется чертежами. На фиг.1 изображен кейс портативной стоматологической установки с манипулятором. На фиг.2 - портативная стоматологическая установка во время лечения пациента. На фиг.3 - миниатюрная односторонняя капа с приводом изменения положения головки фрезы типа «гексапод» для обработки проксимальной области одного зуба, в сборе. На фиг.4 - то же, со снятой крышкой, вид в изометрии. На фиг.5 - то же, со снятой крышкой, вид с торца. На фиг.6 - то же, вид в изометрии. На фиг.7 - привод головки фрезы типа «гексапод». На фиг.8 - миниатюрная односторонняя капа с приводом типа «гексапод» для обработки проксимальной и дистальной областей зуба, в сборе. На фиг.9 - то же, вид с торца. На фиг.10 - то же, вид сбоку. На фиг.11 - миниатюрная двухопорная односторонняя капа с линейными приводами головки для обработки проксимальной и дистальной областей зуба. На фиг.12 - то же, со снятой крышкой в крайнем заднем положении головки, вид в изометрии. На фиг.13 - то же, со снятой крышкой в крайнем переднем положении головки, вид в изометрии. На фиг.14 - то же, привод. На фиг.15 - миниатюрная двухопорная односторонняя капа для обработки проксимальной и дистальной областей зуба с приводом типа «гексапод» со снятой крышкой. На фиг.16 - то же, вид с торца. На фиг.17 - миниатюрная односторонняя консольная капа с приводом типа «гексапод» для обработки проксимальной и дистальной областей зуба в сборе. На фиг.18 - то же, со снятой крышкой. На фиг.19 - то же, вид сбоку. На фиг.20 - то же, вид с торца. На фиг.21 - малогабаритная двухсторонняя универсальная капа для обработки проксимальной и дистальной областей боковых зубов (например, премоляров и моляров) с расположением привода типа «трипод» внутри полости рта пациента, вид справа. На фиг.22 - то же, вид слева. На фиг.23 - то же, вид сзади. На фиг.24 - то же, головка фрезы. На фиг.25 - малогабаритная двухсторонняя универсальная капа для обработки проксимальной и дистальной областей передних зубов (например, резцов и клыков) с наружным расположением привода типа «трипод». На фиг.26 - то же, вид сбоку. На фиг.27 - малогабаритная двухсторонняя универсальная капа для обработки проксимальной и дистальной областей боковых зубов (например, премоляров и моляров) с наружным расположением привода типа «трипод». На фиг.28 - то же, внешний вид. На фиг.29 - то же, крепление привода. На фиг.30 - то же, привод. На фиг.31 - схематичное изображение компьютерной системы управления.
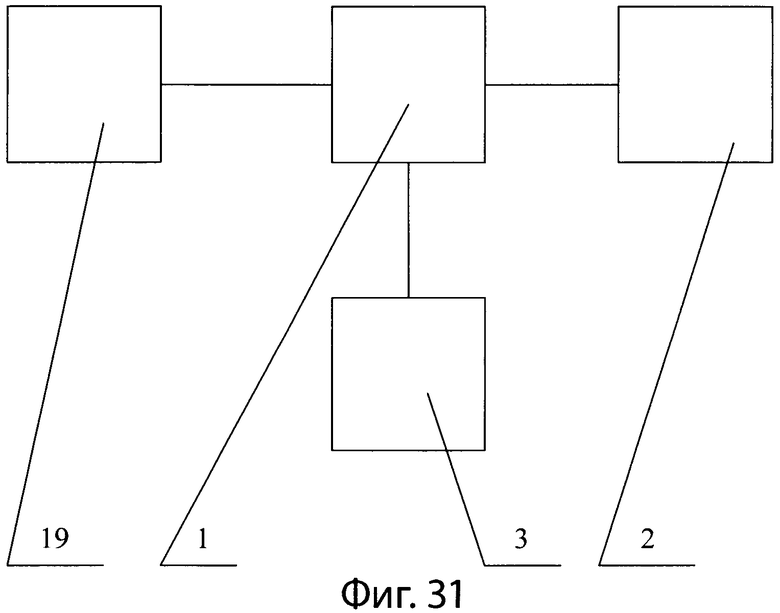
Портативная установка с малогабаритным устройством для обработки зубов и дистанционным управлением включает расположенную в кейсе компьютерную систему управления 1, связанную с монитором 2, наружным манипулятором 3 и системой привода зубоврачебных инструментов. В кейсе расположен набор малогабаритных устройств для обработки зубов, выполненных в виде кап 4 разного размера и формы, пульт 5 управления видеокамерами 6 и светодиодными головками (на рисунке не показано) и стоматологические инструменты 7. Кейс оснащен разъемами 8 программирования и настройки, гнездами 9 для подключения приводных механизмов кап 4, клавиатурой 10 и подложкой 11 манипулятора 3. Манипулятор 3 включает джойстик 12, связанный с датчиками 13 и 14 вращательного движения, датчиками 15 линейного перемещения. Компьютерная система управления 1 выполнена с возможностью формирования на мониторе 2 динамичной трехмерной модели зуба. Зубоврачебный инструмент 16 установлен в капе 4 и связан с наружным манипулятором 3 посредством системы управления. Каждая капа 4 дополнительно снабжена видеокамерой 17, установленной в непосредственной близости к зубоврачебному инструменту 16 и связанной с монитором 2 компьютера. Портативная установка снабжена дополнительным монитором 18 для пациента, а также средствами подачи сжатого воздуха и раствора к головке 20 и средствами для удаления слюны из ротовой полости (на рисунке не показано).
Набор кап 4 выполнен разной формы, разного размера и разного назначения. Изображенная на фиг.3-6 миниатюрная односторонняя капа 4 с приводом 19 изменения положения головки 20 высокоскоростной фрезы 21 типа «гексапод» предназначена для обработки проксимальной области только одного зуба. Эта капа 4 отличается простотой конструкции и незначительным весом, легко помещается во рту пациента, опираясь на два-три зуба нижней и верхней челюстей. Для защиты от повреждения эмали зуба и корпуса капы 4 предназначены эластичные прокладки 22 (например, из латекса), закрепленные на корпусе 23 капы 4 сверху и снизу. На корпусе 23 посредством сферических опор 24 установлены шесть линейных двигателей 25 привода 19 типа «гексапод» изменения положения головки 20 фрезы 21 относительно поверхности зуба (см. фиг.7). В корпусе 23 капы 4 имеется проем, расположенный напротив фрезы 21 головки 20 для обеспечения доступа фрезы 21 к пораженным тканям зуба. Привод вращения высокоскоростной фрезы 21 расположен внутри головки 20. Линейные двигатели 25 состоят из статоров 26 и роторов 27 и связаны с системой питания установки через гнезда 9. Видеокамера 6 может быть размещена на головке 20 зубоврачебного инструмента.
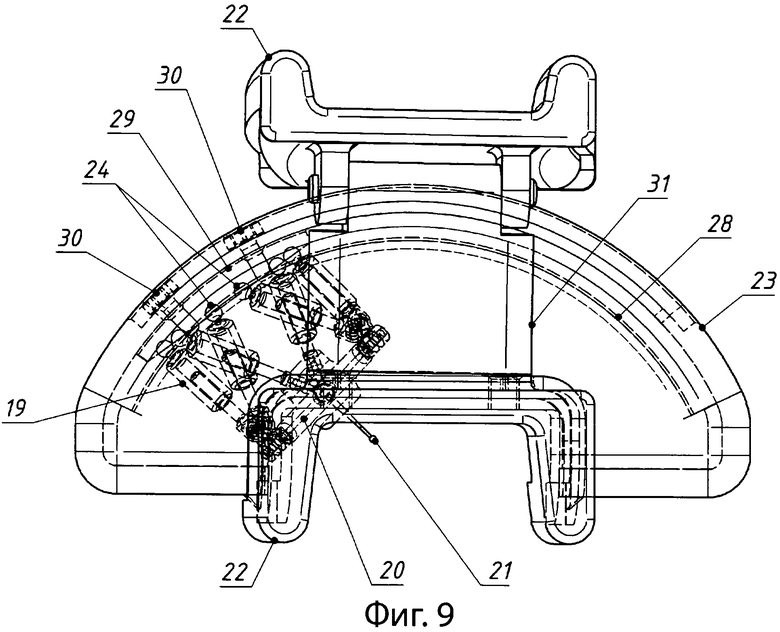
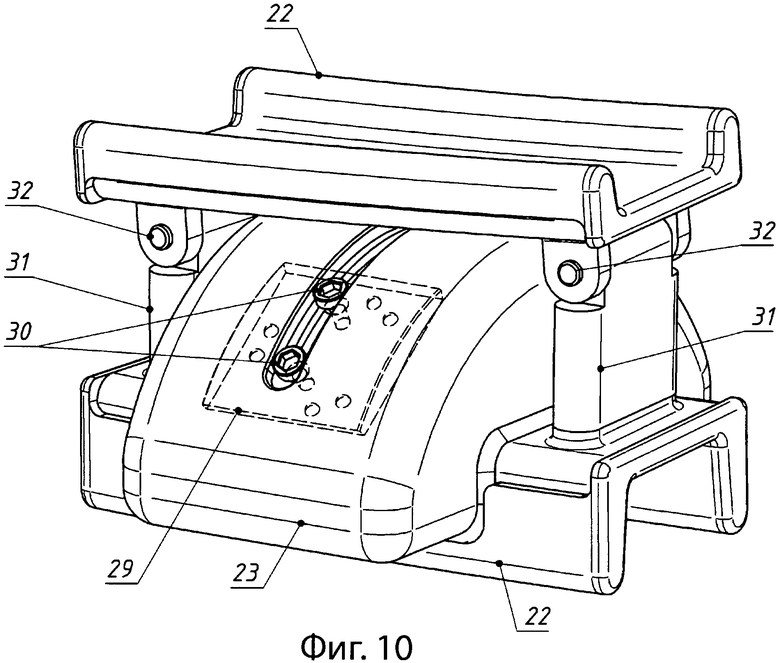
Изображенная на фиг.8-10 миниатюрная односторонняя капа 4 с приводом 19 изменения положения головки 20 фрезы 21 типа «гексапод» предназначена для обработки проксимальной и дистальной областей одного зуба. Она снабжена дополнительной криволинейной направляющей 28 для перестановки каретки 29 головки 20 зубоврачебного инструмента. Самым простым вариантом изменения положения каретки 29 головки 20 относительно направляющей 28 является перестановка и крепление с помощью винта 30. Более эффективным вариантом перемещения головки 20 относительно направляющей 28 является наличие приводного устройства (на рисунке не показано). Корпус 23 этой капы 4 может быть выполнен разборным благодаря использованию поворотных стоек 31, установленных на осях 32.
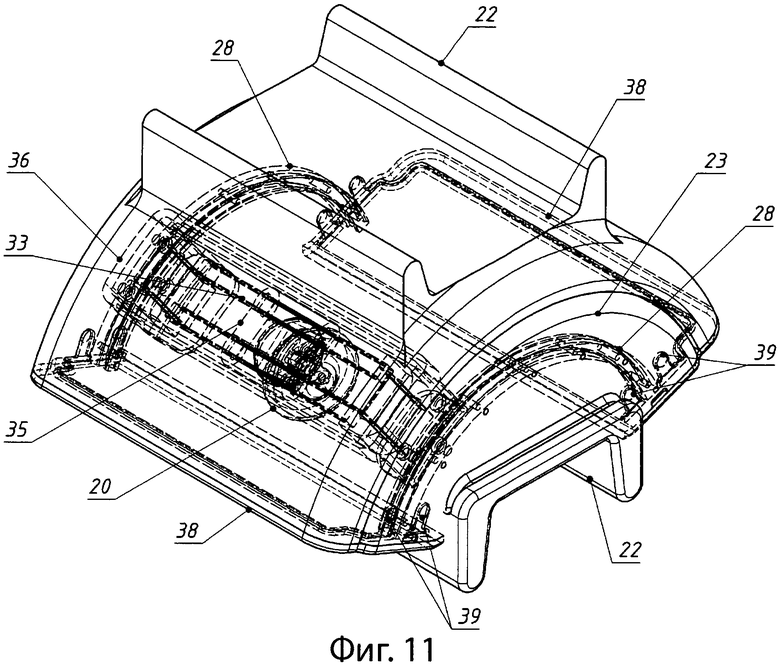
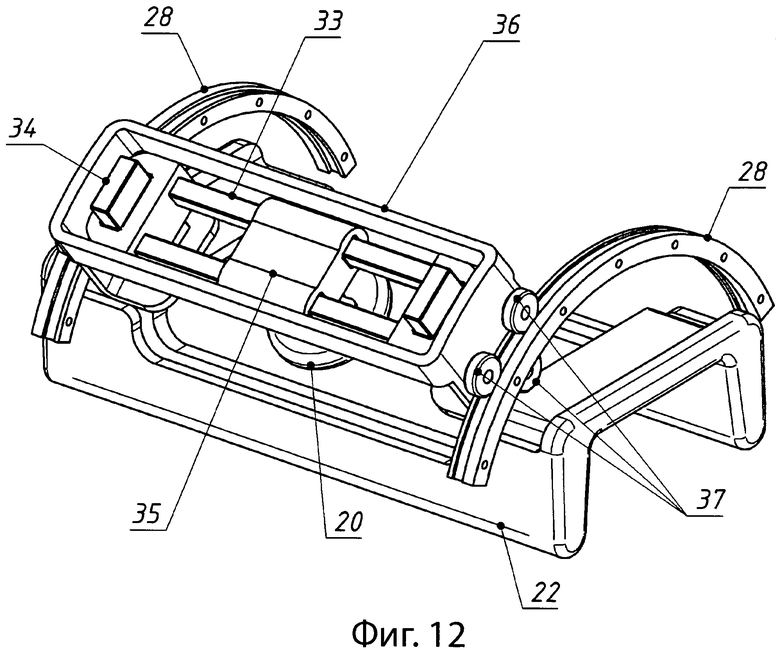
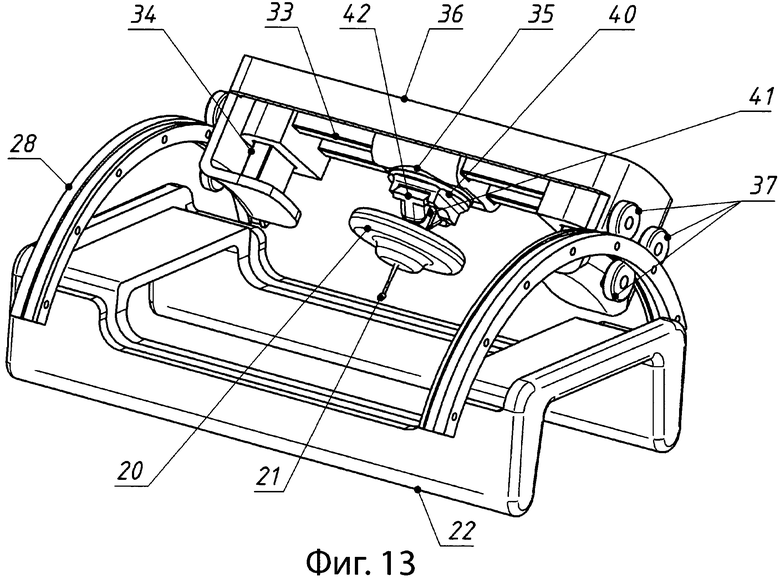
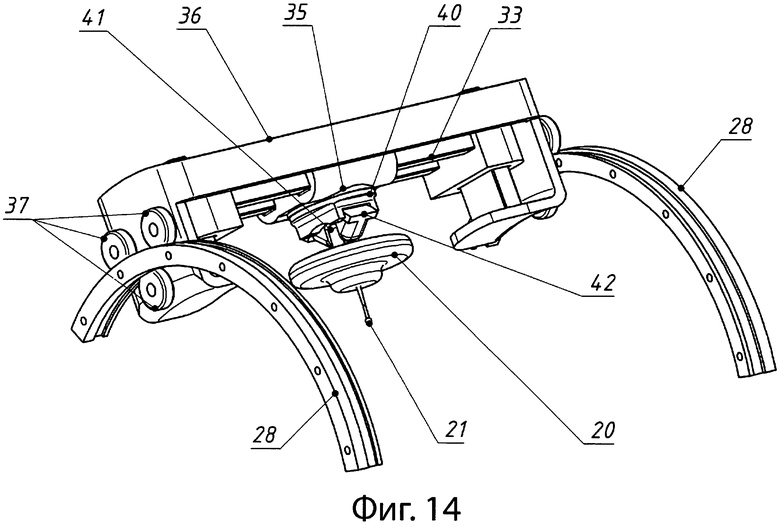
Изображенная на фиг.11-14 миниатюрная односторонняя капа 4 снабжена кареткой 33 вертикального перемещения головки 20, связанной с линейным приводом 34 вертикального перемещения и кареткой 35 продольного перемещения с линейным приводом 36 продольного перемещения. Каретки 33 и 35 расположены на рамке 36 корпуса 23. Эта капа 4 снабжена двумя расположенными по краям криволинейными направляющими 28 с возможностью перестановки и крепления в заданном положении винтом 30. При необходимости капа 4 может быть снабжена дополнительным приводным устройством для перемещения относительно направляющих 28 посредством роликов 37. Корпус 23 капы 4 снабжен съемной крышкой 38 с фиксаторами 39. Головка 20 фрезы 21 установлена на поворотном столе 40 каретки 33 посредством кронштейна 41 с поворотными коромыслами 42.
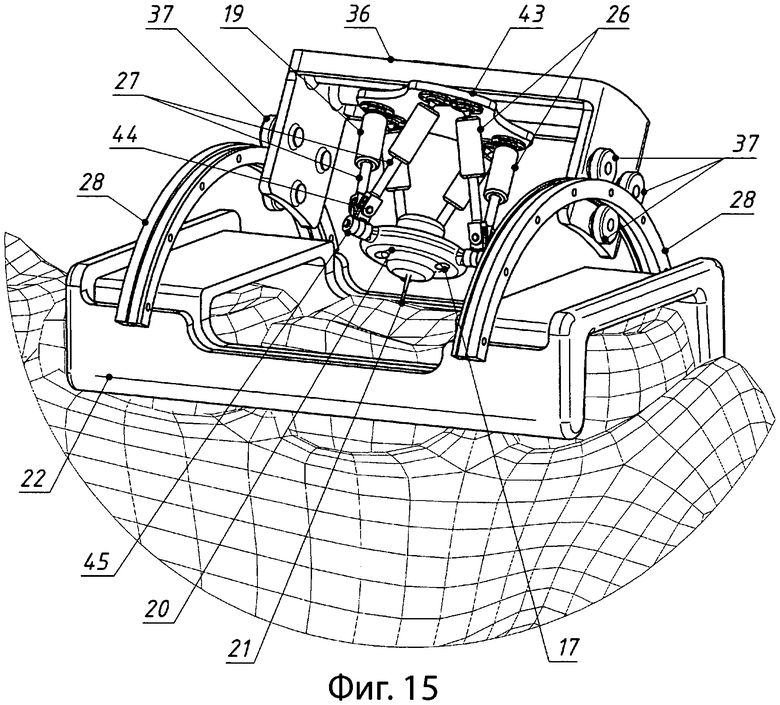
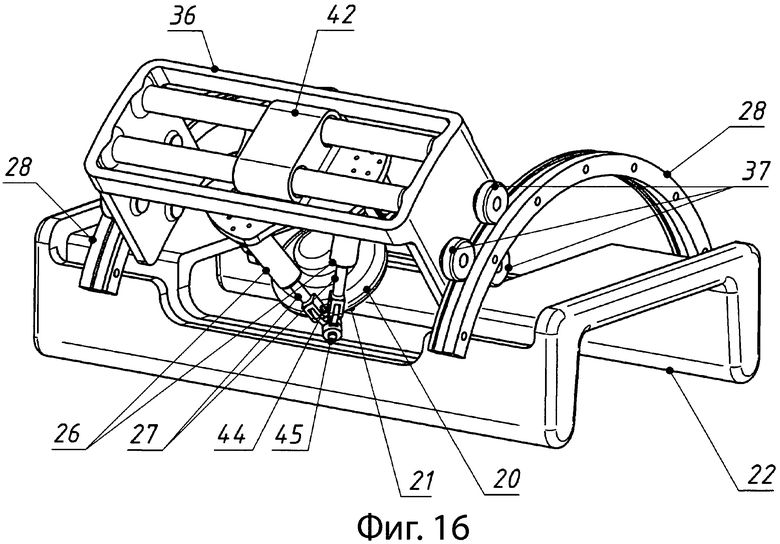
Изображенная на фиг.15-16 миниатюрная односторонняя капа 4 отличается от предыдущей использованием привода 19 изменения положения головки 20 фрезы 21 типа «гексапод», связанного с рамкой каретки 42 посредством опорной площадки 43 для статоров 26. При этом оси 44 роторов 27 связаны с головкой 20 через проушины 45.
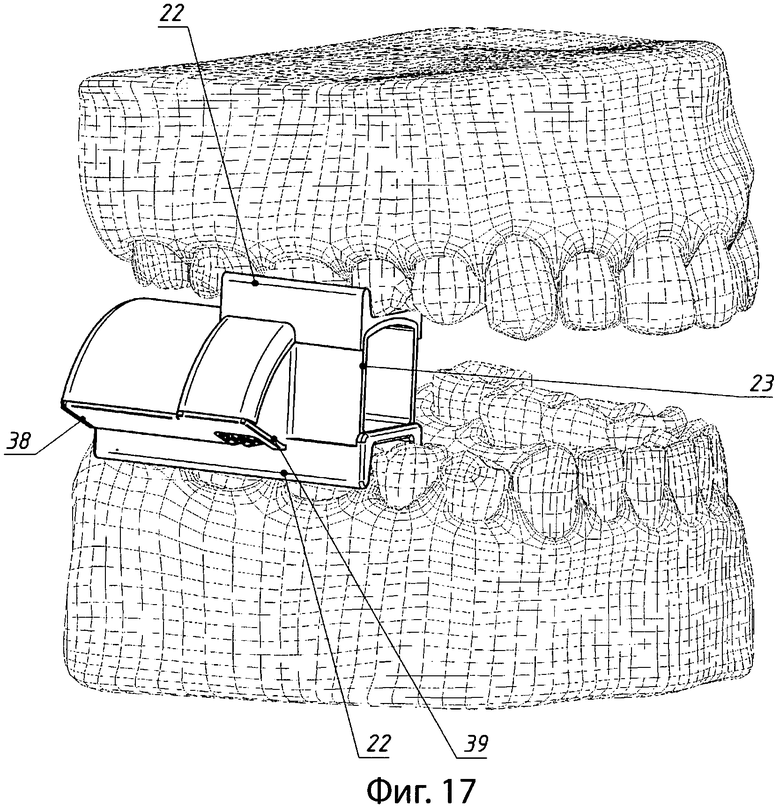
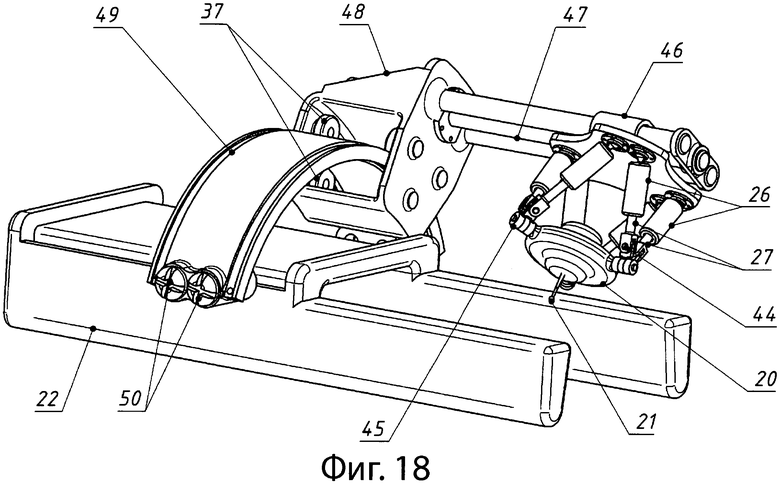
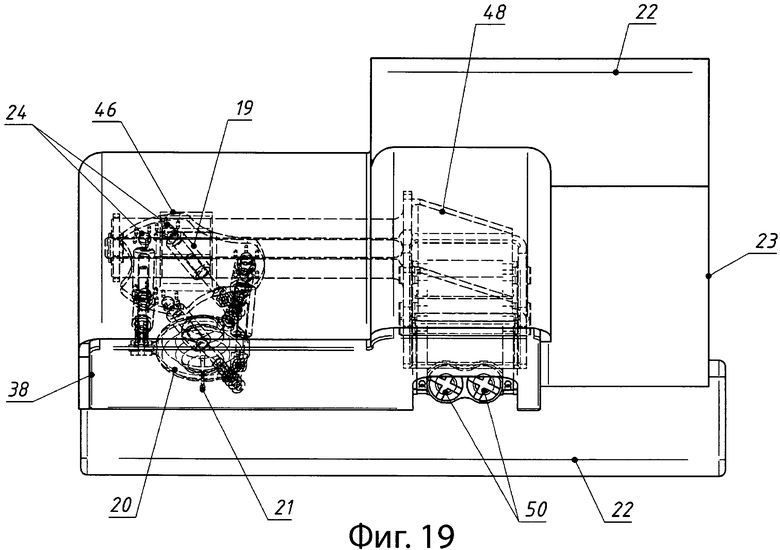
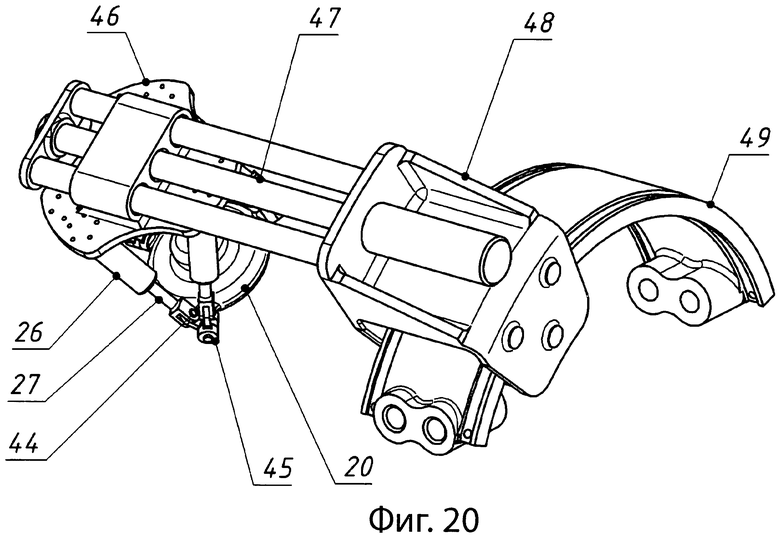
Изображенная на фиг.17-20 миниатюрная односторонняя капа 4 характеризуется консольной установкой каретки 46 на ходовых винтах 47, связанных противоположным концом с кареткой 48 криволинейного движения по направляющей 49, закрепленной винтами 50 на корпусе 23 капы 4.
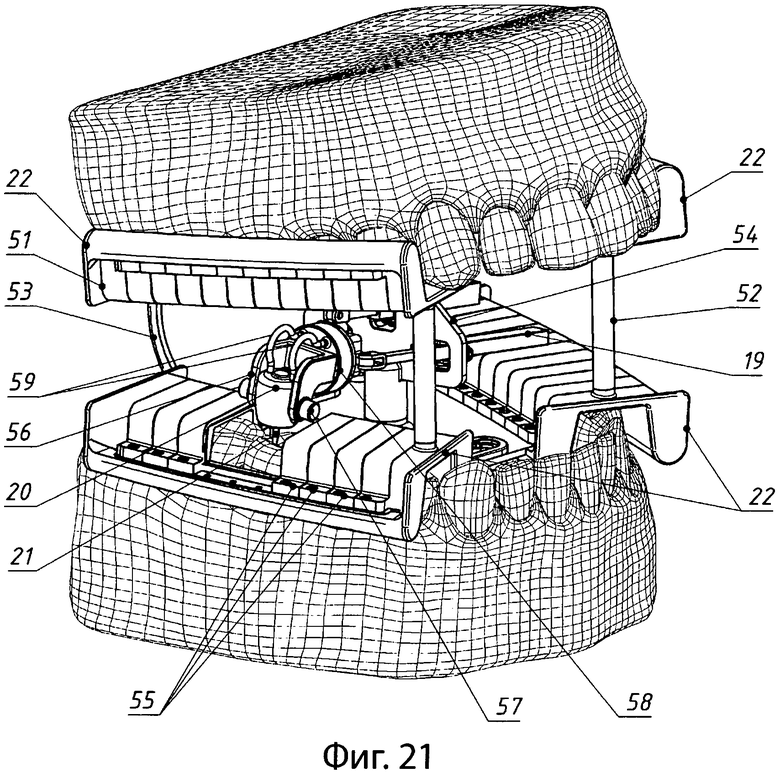
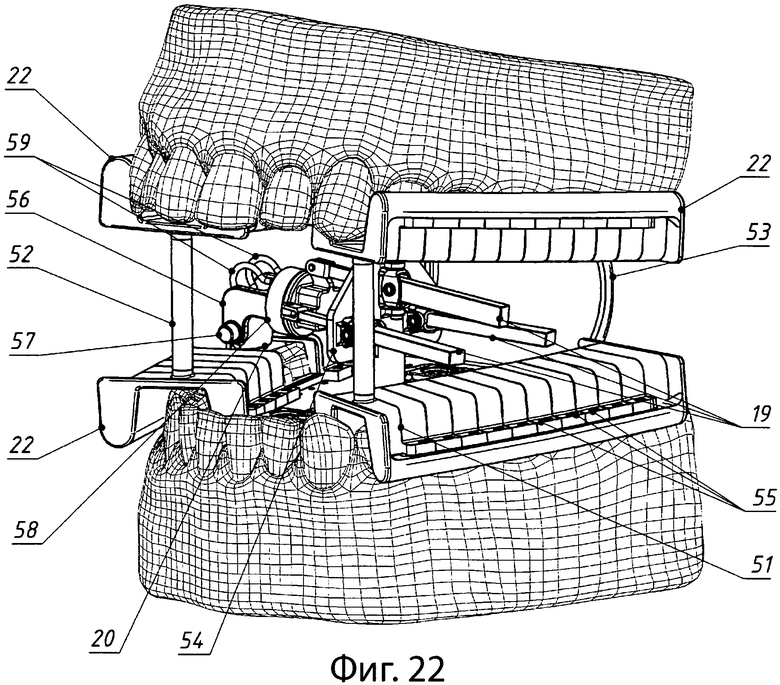
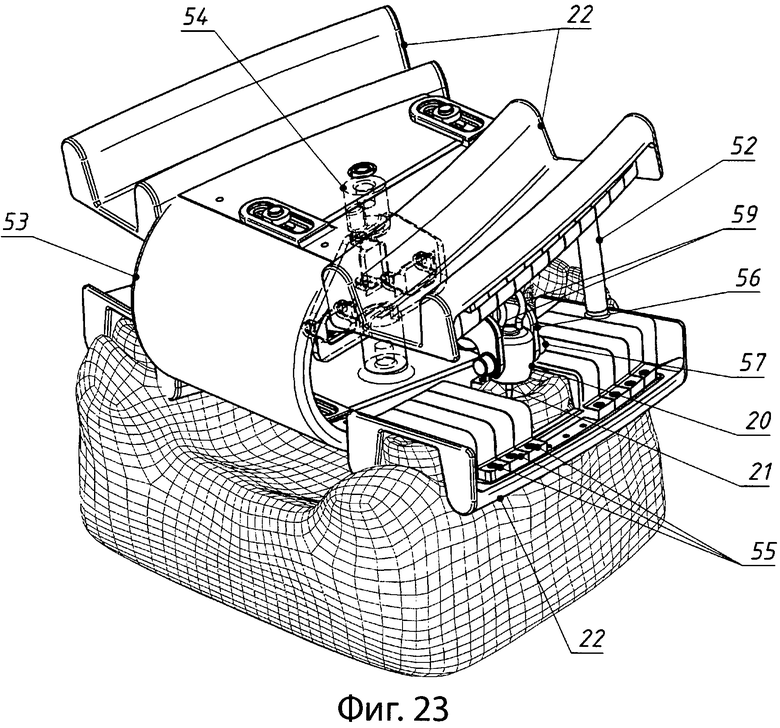
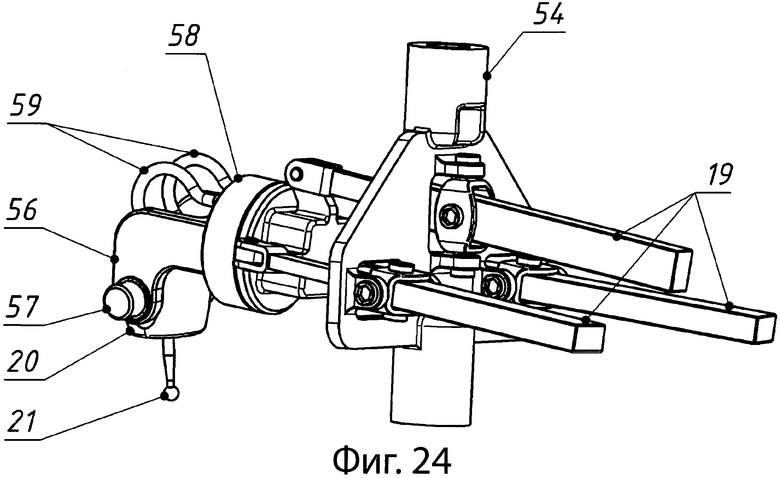
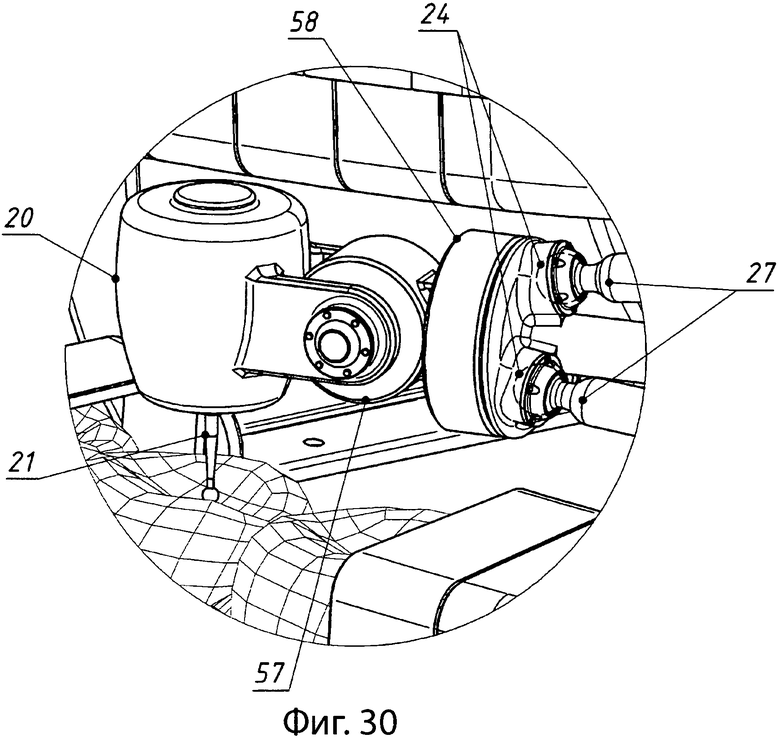
В набор кап 4 входят более сложные универсальные конструкции. На фиг.21-23 изображена малогабаритная двухсторонняя универсальная капа 4 для обработки проксимальной и дистальной областей боковых зубов с расположением привода 19 перемещения типа «трипод» головки 20 внутри полости рта пациента. Капа 4 снабжена сегментными упорными кожухами 51 с закрепленными на них прокладками 22. Кожухи 51 связаны между собой передними опорами 52 и задней обечайкой 53. Привод 19 головки 20 зубоврачебного инструмента связан с сегментными упорными кожухами 51 посредством монтажного кронштейна 54. Внутренняя часть кожухов 51 снабжена съемными сегментами 55 П-образного вида для обеспечения доступа к зубам, подлежащим обработке. Головка 20 фрезы 21 установлена в изогнутой вилке 56 и связана с приводом 57 поворота относительно вилки 56. Вилка 56 связана с приводом 58 ее поворота относительно монтажного кронштейна 54. Шланги 59 для подачи сжатого воздуха связаны с головкой 20 в ее верхней зоне.
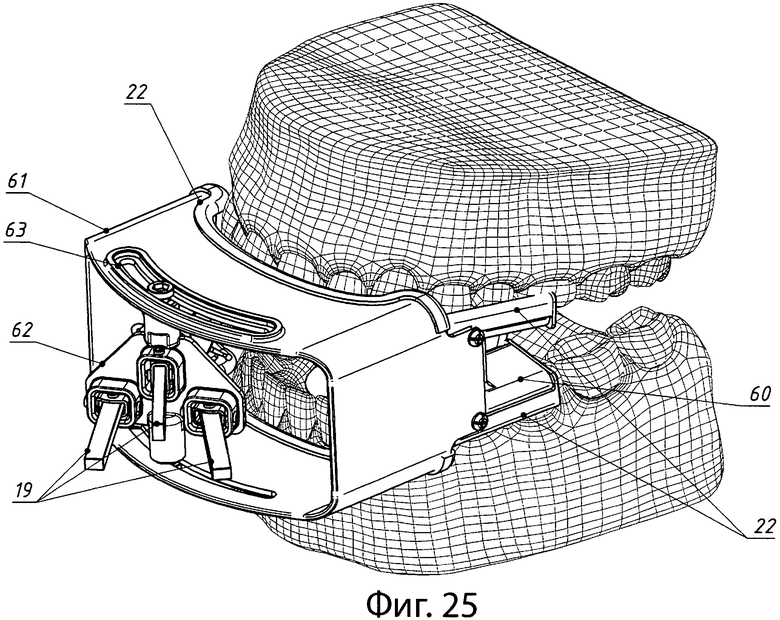
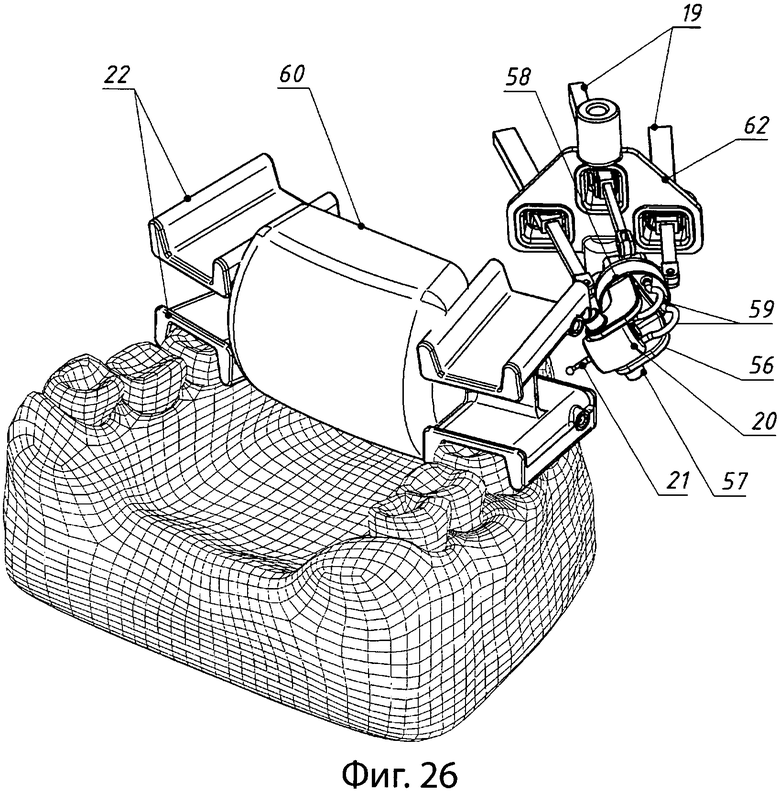
Двухсторонняя универсальная капа 4 для обработки проксимальной и дистальной областей передних зубов, изображенная на фиг.25 и 26, имеет наружное расположение привода 19 перемещения головки 20 типа «трипод». Эта капа 4 снабжена сегментными упорными кожухами 60 для зубов, связанными между собой передней монтажной обечайкой 61, снабженной монтажным кронштейном 62 привода 19 головки 20 фрезы 21. Монтажная обечайка 61 имеет криволинейный паз 63 для изменения положений монтажного кронштейна 62 относительно обечайки 61.
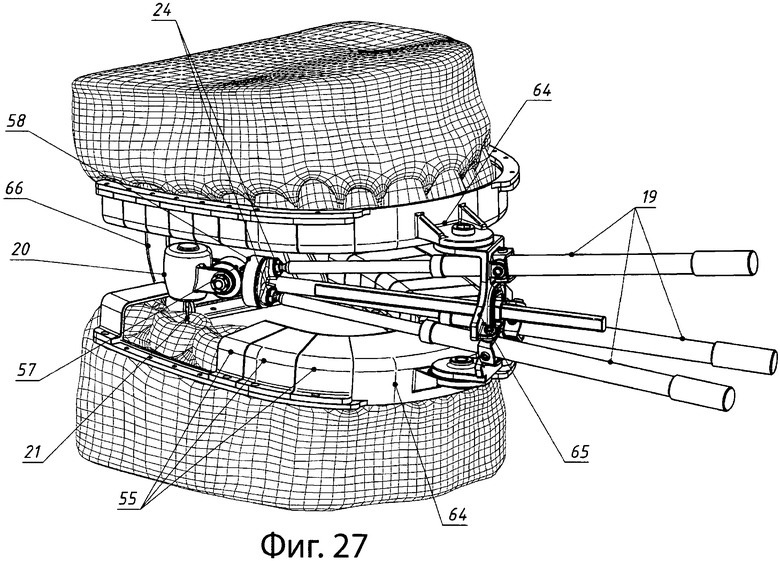
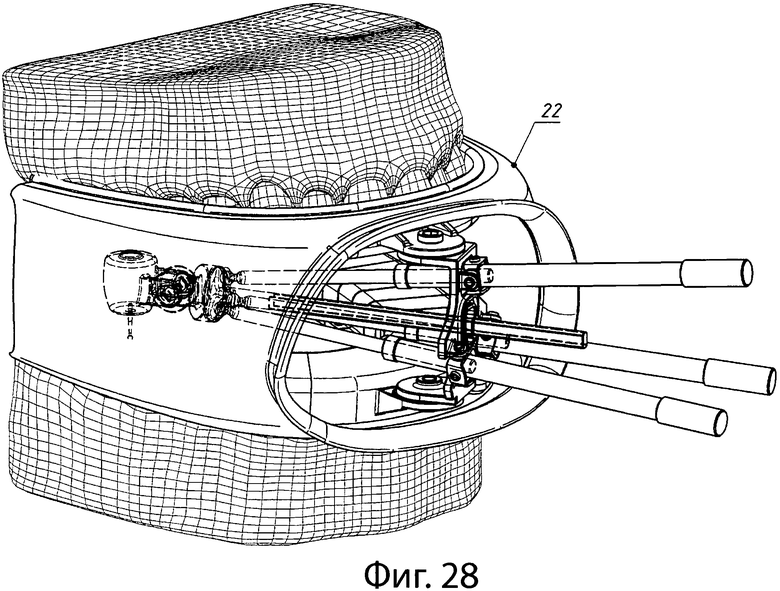
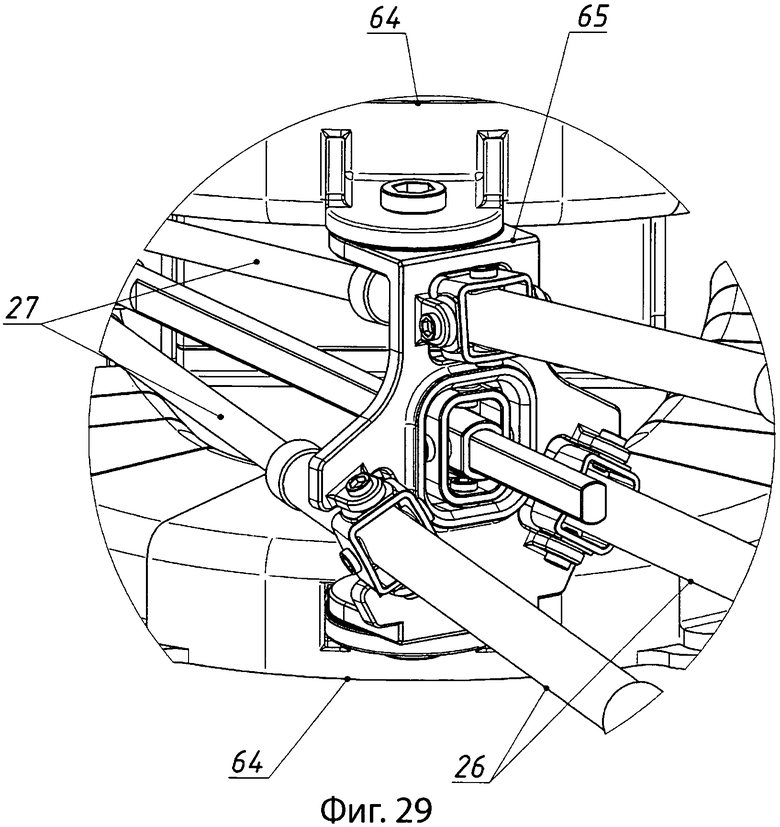
Изображенная на фиг.27 и 28 универсальная капа 4 для обработки проксимальной и дистальной областей боковых зубов снабжена полукруглыми упорными кожухами 63 для зубов, связанными между собой передним монтажным кронштейном 64 и задней обечайкой 65. Привод 19 головки 20 фрезы 21 выполнен в виде трипода с наружным расположением.
Способ особо точной обработки зубов предусматривает предварительный осмотр полости рта пациента. Врач определяет пораженный зуб и пораженный участок, а также степень поражения зуба. Затем подбирает капу 4 для выбранного зуба из набора, имеющегося в кейсе портативной установки. Производит установку и фиксацию выбранной капы 4 в полости рта пациента. Проверяет, чтобы пациент не испытывал дискомфорта от инородного предмета во рту, чтобы эластичные прокладки 22 надежно защищали зубы и десны от повреждений. Т.к. каждая капа 4 оснащена не только зубоврачебным инструментом с приводом 19, но и видеокамерой 6, то сразу после установки капы 4 в полость рта пациента и подключения инструмента к гнездам 9 кейса получают на мониторе 2 компьютера многократно увеличенное изображение выбранного для обработки места на поверхности зуба. Капу 4 располагают таким образом, чтобы видеокамера 6 показывала изображение пораженного участка и положение зубоврачебного инструмента на мониторе 2 компьютера. Подключают к системе управления 1 наружный манипулятор 3 и, управляя джойстиком 12, связанным с датчиками 13 и 14 вращательного движения, датчиками 15 линейного перемещения и с фрезой 21, осуществляют компьютерное программирование зоны обработки по точкам. Движение джойстика 12, передаваемое на фрезу 21 (которая в этот момент не вращается), дает возможность легонько прикасаться к поверхности пораженного участка во всех подлежащих обработке точках и осуществлять шестикоординатное программирование зоны обработки по точкам. Поскольку компьютерная система управления 1 выполнена с возможностью формирования на мониторе 2 динамичной трехмерной модели зуба и заданной траектории движения зубоврачебного инструмента, то врач видит на мониторе 2 не только увеличенное изображение зуба, но и заданную зону обработки.
Обработку выбранной зоны можно осуществлять двумя методами. Первый предусматривает автоматическую работу зубоврачебного инструмента в соответствии с заданной шестикоординатным программированием траекторией движения инструмента. В особо сложных случаях врач, управляя джойстиком 12 наружного манипулятора 3 с использованием получаемого на мониторе увеличенного изображения, дистанционно осуществляет микроточную обработку пораженного участка движением зубоврачебного инструмента. Микроточную работу зубоврачебного инструмента обеспечивают его микроскопические размеры, выполнение из сверхпрочных материалов и высокая точность автоматизированного движения всех элементов системы управления по заданной компьютером программе. Второй метод обработки предусматривает ручное управление зубоврачебным инструментом с помощью джойстика 12. Врач на экране монитора 2 видит увеличенное изображение обрабатываемой зоны и конец фрезы 21. Передвигая посредством джойстика 12 через систему управления головку 20, подводит фрезу 21 к выбранной зоне и микроскопическими слоями снимает пораженные ткани зуба. Такой щадящий, малотравматичный метод обработки с высокой степенью точности движения зубоврачебных инструментов при их дистанционном управлении исключает удаление и повреждение здоровых тканей зуба, позволяет удалить только поврежденные участки любой формы, конфигурации и места расположения на зубе. При этом пациент не испытывает дискомфорта и болевых ощущений, не нервничает, не напрягает лицевые мышцы. Может наблюдать за процессом обработки по дополнительному монитору 18 либо слушать расслабляющую музыку в наушниках, читать и т.д. В случае необходимости можно использовать подачу сжатого воздуха для осушения обрабатываемой поверхности зуба, подавать к месту обработки раствор для промывания и подключать слюноотсос.
Данный способ предусматривает возможность лазерной и светооптической обработки зубов. Дистанционное управление зубоврачебным инструментом позволяет использовать головку 20 с любой насадкой, в том числе лазерной или светооптической. Посредством манипулятора 3 с приводом 19 на головку 20 и динамичной трехмерной модели зуба можно осуществлять лазерную обработку пораженного участка, светооптическое облучение выбранной зоны, шлифование и фрезерование поверхности зуба. При необходимости в комплект зубоврачебных инструментов кейса включают лазерные или светооптические насадки.
Используя изображенную на фиг.3-6 миниатюрную одностороннюю капу 4 с приводом 19 типа «гексапод», предназначенную для обработки проксимальной области только одного зуба, надевают ее на тот участок верхней или нижней челюсти, который подлежит обработке, таким образом, чтобы пораженный участок находился в зоне расположения фрезы 21. Т.к. эта капа 4 отличается простотой конструкции и незначительным весом, она легко помещается во рту пациента, опираясь на два-три зуба нижней и противолежащей верхней челюстей. Эластичные прокладки 22 надежно защищают от повреждения эмаль зуба везде, где зуб соприкасается с корпусом 23 капы 4. Широкий диапазон перемещений линейных двигателей 25, состоящих из статоров 26 и роторов 27, обеспечивает поворот и подачу фрезы 21 к любой точке зуба, расположенной на его верхней поверхности. Микроскопические размеры высокоскоростной фрезы 21 и нанометрическая глубина обработки пораженных тканей исключают излишнее удаление здоровых тканей зуба, значительно уменьшают неприятные ощущения пациента при обработке зуба, связанные не только с фрезерованием пораженного участка зуба, но и в традиционном варианте лечения - с необходимостью сидеть широко открыв рот. Благодаря данному изобретению пациент после установки капы 4 может закрыть рот, сжав эластичные прокладки 22. Челюстные мышцы при этом значительно расслаблены, что также уменьшает болевые ощущения пациента.
Миниатюрные односторонние капы 4, изображенные на фиг.8-20, имеют более широкий диапазон движения головки 20 с фрезой 21 и предназначены для обработки проксимальной и дистальной областей зуба. Поворотом головки 20 обеспечивают доступ фрезе 21 к любой верхней и боковой поверхностям зуба.
Малогабаритная двухсторонняя универсальная капа, изображенная на фиг.21-24, имеет большой диапазон возможностей. Вынимая определенные съемные сегменты 55 П-образного вида с внутренней части кожухов 51, обеспечивают доступ фрезы 21 к любому зубу, находящемуся под кожухом 51. Поскольку головка 20 фрезы 21 установлена в изогнутой вилке 56 и связана с приводом 57 поворота относительно вилки 56, а вилка 56 связана с приводом 58 ее поворота относительно монтажного кронштейна 54, то у головки 20 с фрезой 21 обеспечиваются все степени свободы, необходимые для доступа к самым трудным участкам любого зуба на верхней и нижней челюстях, где находятся кожухи 51 капы 4. Расположение привода 19 в полости рта пациента ограничивает его размеры в сторону значительной миниатюризации, что несколько уменьшает длину хода линейных двигателей трипода. Пациент во время процедуры сидит с открытым ртом, но лицевые мышцы не испытывают значительного напряжения, т.к. зубы опираются на эластичные прокладки 22.
Отличие капы 4, изображенной на фиг.25 и 26, относится к форме корпуса капы 4 с наружно расположенной передней монтажной обечайкой 61 и наружно расположенным приводом 19. Эта капа 4 предназначена для обработки передних зубов и имеет больший потенциал возможностей движения головки 20 благодаря наружному расположению линейных двигателей привода 19. С таким расположением привода 19 у него нет ограничений по длине линейных двигателей.
Капа 4, представленная на фиг.27-30, предназначена для работы с боковыми зубами, но является более универсальной, чем капа 4 по фиг.21-24. Благодаря увеличению линейных размеров линейных двигателей привода 19 улучшаются координатные движения головки 20 с фрезой 21. У этой капы нет ограничений по доступу к любой поверхности любого зуба с боковым расположением.
Все капы 4, изображенные на фиг.21-30, относящиеся к малогабаритным устройствам, имеют не столь миниатюрные размеры, как предыдущие капы 4, представленные на фиг.3-20, но их универсальность, совершенство привода 19, связь с компьютерной системой управления 1, обеспечивающая дистанционное управление зубоврачебным инструментом, позволяют эффективно использовать их в наборе кап 4 кейса.
Конструктивное выполнение и внешний компактный вид кап 4 и портативной установки позволяют при высокой эффективности работы использовать их в любых условиях, в том числе и походных. Электрическая схема, компьютерная система 1 изготавливаются в условиях как единичного, так и серийного производства с использованием традиционной элементной базы, традиционных конструкторских материалов.
Таким образом, технический результат, достигаемый с использованием заявленного изобретения, заключается в повышении эффективности способа обработки зубов и универсальности портативной установки при высокой точности движения стоматологических инструментов и уменьшении степени травматичности обработки за счет использования системы дистанционного управления в сочетании с компьютерным динамическим моделированием увеличенных размеров зоны обработки.
Группа изобретений относится к медицине и медицинской технике, а именно к стоматологии. Осуществляют осмотр полости рта пациента, определение пораженного участка и подбор капы, оснащенной зубоврачебным инструментом с приводом, соединенной с компьютерной системой управления, оснащенной наружным манипулятором и видеокамерой, показывающей изображение пораженного участка и положение зубоврачебного инструмента на мониторе компьютера. Формируют динамичную трехмерную модель зуба с пораженным участком. Дистанционно, точечным прикосновением зубоврачебного инструмента, осуществляют микроточную обработку пораженного участка. Посредством манипулятора и динамичной трехмерной модели зуба осуществляют фрезерование пораженного участка, лазерную и светооптическую обработку пораженного участка. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов включает систему управления и зубоврачебный инструмент. Зубоврачебный инструмент установлен в малогабаритном устройстве для обработки зубов и связан с наружным манипулятором посредством системы управления. Малогабаритное устройство для обработки зубов снабжено видеокамерой. Видеокамера установлена в непосредственной близости к зубоврачебному инструменту и связана с монитором компьютера. Малогабаритное устройство для обработки зубов выполнено в виде набора кап разного размера и формы. Капы предназначены для разных условий обработки. Изобретения обеспечивают повышение эффективности обработки зубов за счет высокой точности движения стоматологических инструментов и уменьшения степени травматичности обработки. 2 н. и 19 з.п. ф-лы, 31 ил.
1. Способ особо точной обработки зубов, включающий осмотр полости рта пациента, определение пораженного участка и подбор капы для выбранного зуба, установку и фиксацию капы, оснащенной зубоврачебным инструментом с приводом и видеокамерой, последующее соединение привода с компьютерной системой управления, оснащенной наружным манипулятором, при этом располагают капу таким образом, чтобы видеокамера показывала изображение пораженного участка и положение зубоврачебного инструмента на мониторе компьютера, причем изображение с видеокамеры увеличивают, затем, управляя наружным манипулятором с использованием получаемого на мониторе изображения, дистанционно осуществляют микроточную обработку пораженного участка, причем посредством наружного манипулятора управляют движением зубоврачебного инструмента.
2. Способ особо точной обработки зубов в полости рта пациента по п.1, отличающийся тем, что перед работой манипулятора формируют динамичную трехмерную модель зуба с пораженным участком, связанную через систему управления с движением манипулятора и с изображением видеокамеры, а затем точечным прикосновением зубоврачебного инструмента к пораженному участку посредством управления наружным манипулятором формируют модель обработки пораженного участка методом программирования по точкам.
3. Способ особо точной обработки зубов по п.1, отличающийся тем, что посредством манипулятора и динамичной трехмерной модели зуба осуществляют фрезерование пораженного участка.
4. Способ особо точной обработки зубов по п.1, отличающийся тем, что посредством манипулятора и динамичной трехмерной модели зуба осуществляют лазерную обработку пораженного участка.
5. Способ особо точной обработки зубов по п.1, отличающийся тем, что посредством манипулятора и динамичной трехмерной модели зуба осуществляют светооптическую обработку пораженного участка.
6. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов, включающая систему управления, зубоврачебный инструмент, установленный в малогабаритном устройстве для обработки зубов и связанный с наружным манипулятором посредством системы управления, при этом малогабаритное устройство для обработки зубов снабжено видеокамерой, установленной в непосредственной близости к зубоврачебному инструменту и связанной с монитором компьютера, причем малогабаритное устройство для обработки зубов выполнено в виде набора кап разного размера и формы, предназначенных для разных условий обработки.
7. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.6, отличающаяся тем, что она снабжена кейсом, а монитор компьютера, система управления, наружный манипулятор и набор кап разного размера и формы в разобранном виде расположены в кейсе установки.
8. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.6, отличающаяся тем, что она снабжена средствами для формирования динамичной трехмерной модели зуба.
9. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.8, отличающаяся тем, что средства для формирования динамичной трехмерной модели зуба расположены в кейсе установки.
10. Портативная установка с малогабаритным устройством для обработки зубов и дистанционным управлением по п.6, отличающаяся тем, что она снабжена дополнительным монитором для пациента.
11. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.6, отличающаяся тем, что капа снабжена верхним и нижним защитными прокладками для установки на противолежащие зубы пациента.
12. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.6, отличающаяся тем, что капа выполнена миниатюрной односторонней, а привод головки зубоврачебного инструмента выполнен в виде гексапода.
13. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.12, отличающаяся тем, что капа снабжена дополнительной криволинейной направляющей для перестановки привода головки зубоврачебного инструмента.
14. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.6, отличающаяся тем, что капа выполнена миниатюрной односторонней и снабжена кареткой перемещения головки зубоврачебного инструмента с линейными приводами, а также снабжена двумя разнесенными по длине криволинейными направляющими перемещения каретки.
15. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.6, отличающаяся тем, что капа выполнена миниатюрной односторонней с приводом головки зубоврачебного инструмента в виде гексапода, установленной на каретке перемещения, и снабжена двумя разнесенными по длине криволинейными направляющими каретки.
16. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.6, отличающаяся тем, что капа выполнена миниатюрной односторонней с приводом головки зубоврачебного инструмента в виде гексапода, установленной на консольной продольной прямолинейной направляющей, и снабжена криволинейной направляющей для перемещения консольной продольной прямолинейной направляющей.
17. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.6, отличающаяся тем, что капа выполнена двухсторонней универсальной и снабжена сегментными упорными кожухами для зубов, связанными между собой передними опорами и задней обечайкой, при этом привод головки зубоврачебного инструмента расположен внутри полоти рта пациента, связан с сегментными упорными кожухами и выполнен в виде трипода.
18. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.6, отличающаяся тем, что капа выполнена двухсторонней универсальной и снабжена сегментными упорными кожухами для зубов, связанными между собой передней монтажной обечайкой, снабженной монтажным кронштейном привода головки зубоврачебного инструмента, выполненного в виде трипода.
19. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по п.6, отличающаяся тем, что капа выполнена двухсторонней универсальной и снабжена полукруглыми упорными кожухами для зубов, связанными между собой передним монтажным кронштейном и задней обечайкой, при этом привод головки зубоврачебного инструмента выполнен в виде трипода с наружным расположением.
20. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по пп.12, 13, 15, 16, отличающаяся тем, что привод головки зубоврачебного инструмента в виде гексапода включает шесть линейных двигателей, выполненных в виде коаксиально расположенных роторов и статоров, связанных проушинами с головкой зубоврачебного инструмента, и сферическими опорами с кареткой перемещения.
21. Портативная установка с дистанционным управлением малогабаритного устройства для обработки зубов по пп.17-19, отличающаяся тем, что привод головки зубоврачебного инструмента в виде трипода включает консольно расположенные под острым углом к головке зубоврачебного инструмента три линейных двигателя, снабженные промежуточной опорой в виде монтажного кронштейна.
| RU 2003115421 А, 27.11.2004 | |||
| US 5545039 А, 13.08.1996 | |||
| РЯХОВСКИЙ А.Н | |||
| и др | |||
| Аппаратно-программный комплекс получения SD-моделей зубов | |||
| Стоматология, 2000, 3, с.41-45 | |||
| SAKAE NAGASAWA et al., Construction of database for three-dimensional human tooth models and its ability for education and research - Carious tooth models, Dental Materials Journal 2010; 29(2), с.132-137. |

