Устройство ввода координат (далее Устройство) - это устройство, состоящее из корпуса и механического манипулятора, преобразующего движение в управляющий сигнал. В частности, сигнал может быть использован для позиционирования курсора или прокрутки страниц. Устройство предназначено для работы с компьютерным оборудованием, а также, может применяться для управления пилотируемой и беспилотной техникой.
Устройство ввода координат представляет собой гибрид компьютерной мыши джойстика и клавиатуры. Известны многочисленные конструкции компьютерных мышей, компьютерных джойстиков, трекболов, например: «Computer mouse US 20120262375 A1», ((Intelligent boundless computer mouse system US 6295051 B1»), Joystick US 4870389 A, ((Combination mouse/trackball input device» US 5280276 A, ((Universal ergonomic computer mouse/trackball US 5648798 A».
Однако, как показывает практика, все они обладают значительными недостатками. В частности, джойстики и трекболы отличаются недостаточной точностью управления курсором, а для работы компьютерные мыши необходима ровная поверхность, например стол.
Предлагаемое Устройство ввода координат лишено перечисленных недостатков присущим компьютерной мыши, джойстику и трекболу, т.к. является гибридом джойстика и компьютерной мыши и представлено фигурами:
Фигура - 1: общий вид Устройства, где 1 - корпус, 2 - подвижный манипулятор, 3 - колесо прокрутки, 4 - программируемые клавиши управления, 5 - клавиша отключения светодиода, лазера или оптического датчика, 7 - эластичный гофрированный рукав, 17 - программируемые клавиши.
Фигура - 2 общий вид устройства, где 6 - программируемые клавиши
Фигура - 3, вид Устройства в разрезе, где 8 - призма оптического датчика, 9 - оптический датчик, 10 - фотодиоды, 11 - светодиоды, 12 - акселерометр, 13 - гироскоп, 14 - сферическая опора, 15 - оболочка сферы, 16 - ось сферы. Кроме того, в полостях оболочки расположены аккумулятор или конденсатор, плата обработки информации и другие электронные компоненты (на рисунках не показаны).
Основным элементом устройства является подвижный манипулятор 2, оболочка сферы 15 которого может принимать бесконечное число углов наклона относительно оси сферы 16, а также может вращаться вокруг оси сферической опоры.
Представленное Устройство ввода координат работает следующим образом.
Устройство устанавливается на ровную поверхность, например на стол. Пользователь кистью правой руки обхватывает подвижный манипулятор 2 (Фигура - 1), так, чтобы колесо прокрутки 3, находилось между указательным и безымянным пальцем. При этом, пользовать, передвигая оболочку сферы 15, относительно центра неподвижной сферической опоры 14, может управлять движением курсора по экрану монитора компьютера, а программируемыми клавишами 4, вводить команды, нажимая на них. При этом, оптический датчик 9, в паре с лазером или светодиодом создающими подсветку (не показаны), считывают информацию со сферической опоры 14, определяют положение курсора. Таким образом, сферическая опора 14, является видоизмененным столом. Также, в случае достижения предела поворота оболочки сферы 15 относительно сферической опоры 14, пользователь может нажатием на клавишу отключения светодиода, лазера или оптического датчика 5, прекратить подачу энергии к нему, лазеру или светодиоду, т.е., «ослепить» оптический датчик 9 (Фигура 3). После этого, передвинуть оболочку сферы 15, относительно сферической опоры 14, убрать палец с клавиши отключения датчика 5, после чего, курсор продолжит быть управляемым. Эта манипуляция соответствует поднятию со стола компьютерной мыши с целью ее переноса для продолжения работы, после того, когда она натыкается на предмет, лежащий на столе, или когда курсор достигает пределов рабочего стола монитора или игрового пространства.
Помимо этого, пользователь, в процессе работы или игры на компьютере, может воспользоваться программируемыми клавишами 6 (Фигура - 2). Они предназначены для некоторых жанров компьютерных игр. Для этого пользователю нужно повернуть подвижный манипулятор 2 приблизительно на 180 градусов, так, чтобы указательный, средний и безымянный пальцы руки пользователя могли свободно разместиться на этих клавишах.
Также на корпусе 1, тоже имеются программируемые клавиши 17 (Фигура 1), которыми пользователь может воспользоваться как компьютерной клавиатурой.
Для работы подвижного манипулятора 2, он оснащается аккумулятором. Это не совсем удобно, т.к., пользователю придется для работы на устройстве, заряжать аккумулятор или менять батареи на подвижном манипуляторе 2. Для того, чтобы избежать этого, на нижней окружности оболочки сферы 15, под эластичным гофрированным рукавом 7, установлены фотодиоды 10 и светодиоды 11 (возможна установка лазеров), которые осуществляют беспроводную передачу энергии от корпуса 1, к электронным компонентам расположенных на подвижном манипуляторе. Это работает следующим образом: от корпуса 1, по проводу, на светодиоды 11, подается электрический ток под действием которого, светодиоды (или лазеры) 11 излучают свет, а фотодиоды 10, принимают его и генерируют электрическую энергию, которой заряжаются аккумулятор или конденсатор (не показаны), установленные на подвижном манипуляторе 2. При этом связь подвижного манипулятора 2 с компьютером осуществляется по радиоканалу или другим способом описанном ниже.
Помимо связи по радиоканалу, подвижный манипулятор 2 может связываться с корпусом 1 в оптическом диапазоне, т.е., рядом с фотодиодами 10 и светодиодами 11, располагаются принимающие и передающие светодиоды (не показаны). Светодиоды, установленные на оболочке сферы 15, передают кодированную информацию принимающим светодиодам, установленным на оси сферы 15, которые принимают сигнал и передают его на декодирующий блок, установленный в корпусе 1. Далее сигнал поступает на компьютер по радиоканалу или по кабелю.
Также на подвижном манипуляторе 2, могут быть установлен гироскоп и акселерометр. Гироскоп определяет угол наклона устройства относительно поверхности Земли, а акселерометр служит для определения ориентации устройства в пространстве, для отслеживания его перемещения. Эти датчики, работая с соответствующим программным обеспечением, могут выполнять функцию оптического датчика компьютерной мыши. При этом, пользователь, передвигая оболочку сферы 15, относительно сферической опоры 14, изменяет положение гироскопа 13 и акселерометра 12, тем самым каждый раз задавая им новые координаты относительно Земли и центра сферической опоры 14. Данные с датчиков анализируются электронной системой подвижного манипулятора 2 и передаются на компьютер или другое анализирующее устройство для вывода на экран монитора в виде курсора управляемого пользователем.
Устройство может иметь другой внешний вид, а также может производиться в «леворуком» исполнении.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВВОДА КООРДИНАТ | 2017 |
|
RU2669093C2 |
| ИГРОВОЙ КОНТРОЛЛЕР | 2016 |
|
RU2658139C1 |
| ИГРОВОЙ КОНТРОЛЛЕР | 2015 |
|
RU2611989C2 |
| Авиационный сайдстик | 2021 |
|
RU2784990C1 |
| Устройство для управления | 2020 |
|
RU2730081C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ (ВАРИАНТЫ) | 2017 |
|
RU2670649C9 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2673406C1 |
| УЛУЧШЕННОЕ БЕСПРОВОДНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 2002 |
|
RU2339087C2 |
| ИНЕРЦИАЛЬНОЕ УСТРОЙСТВО И СПОСОБЫ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ СИСТЕМАМИ | 2015 |
|
RU2648938C2 |
| ГИБРИДНОЕ УСТРОЙСТВО УПРАВЛЕНИЯ КУРСОРОМ ОКОННОГО ИНТЕРФЕЙСА И/ИЛИ ГРАФИЧЕСКОГО ПОЛЬЗОВАТЕЛЬСКОГО ИНТЕРФЕЙСА ПЕРСОНАЛЬНОГО КОМПЬЮТЕРА | 2011 |
|
RU2465633C1 |



Изобретение относится к устройствам ввода. Технический результат заключается в повышении точности управления курсором. Устройство содержит собой корпус с присоединенным к нему подвижным манипулятором, оборудованным устройствами ввода и передачи информации о положении контролирующих устройств. 3 ил.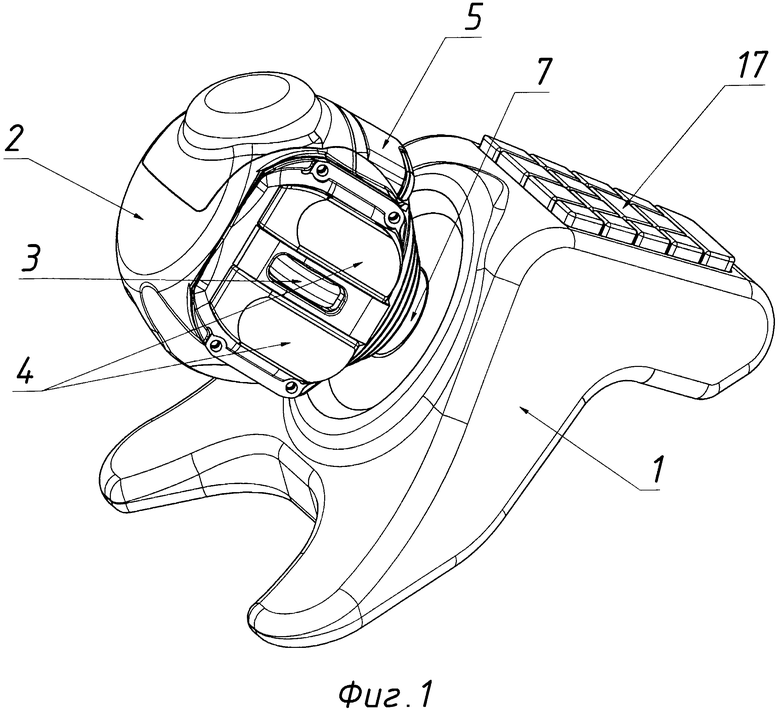
Устройство ввода координат предназначено для работы с компьютерным оборудованием, а также может применяться для управления пилотируемой и беспилотной техникой и представляет собой корпус с программируемыми клавишами и присоединенным к нему подвижным манипулятором, на котором расположены колесо прокрутки и набор программируемых клавиш, и отличается тем, что подвижный манипулятор представляет собой прикрепленную к основанию неподвижную сферу, на которой установлена подвижная оболочка, где расположены колесо прокрутки, программируемые клавиши, оптический датчик с светодиодом или лазером, а также клавишей их отключения, гироскоп, акселерометр, устройство связи с компьютером по радиоканалу, фотодиоды, лазеры или светодиоды для осуществления передачи световой и генерации электрической энергии, аккумулятор или конденсатор электрической энергии, передающие и принимающие фотодиоды для осуществления обмена данными с корпусом устройства в световом диапазоне частот.
| US 5648798 A, 15.07.1997 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ КУРСОРОМ - КОМПЬЮТЕРНЫЙ КУРСОГРАФ, МЕХАНИЗМ СКАНИРОВАНИЯ, КОМБИНИРОВАННАЯ КЛАВИАТУРА И КАРМАННЫЙ КОМПЬЮТЕР С БЕССЕНСОРНЫМ ДИСПЛЕЕМ | 2006 |
|
RU2319999C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2001 |
|
RU2230354C2 |
| КОМПЬЮТЕРНАЯ МЫШЬ НА МАГНИТЕ | 2015 |
|
RU2604860C2 |
| US 5280276 A, 18.01.1994. | |||

