Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и устройству предупреждения столкновений для транспортного средства, в которых пространство вокруг транспортного средства контролируется с помощью датчиков обнаружения препятствий.
Уровень техники
Из публикации DE 102006002232 А1 известны способ и устройство предупреждения столкновений для транспортного средства, в которых при каждой остановке транспортного средства сначала осуществляется регистрация данных о положении находящихся вокруг него объектов в качестве исходного состояния. Через регулярные промежутки времени или в случае определенных событий, например идентификации намерения водителя начать движение, определяются другие положения в качестве фактического состояния. Если в результате сравнения данной фактического состояния с исходным состоянием обнаруживается, что к транспортному средству приблизился по меньшей мере один объект, то эта ситуация идентифицируется как возможность столкновения и водителю выдается предупредительный сигнал.
Если транспортное средство перемещается под управлением водителя на очень малое расстояние (например, лишь на несколько сантиметров при маневрировании на месте для парковки), то при новой остановке в данном известном способе осуществляется регистрация нового исходного состояния. Если, например, в процессе маневрирования в окружающее пространство переместились люди, то при новой остановке эти люди идентифицируются как ориентиры.
Этот способ обладает тем недостатком, что в данном случае водитель не имеет возможности видеть перед остановкой все находящиеся вокруг объекты, поскольку при перемещении транспортного средства всего на несколько сантиметров он не может просматривать в течение всего процесса движения мертвую зону непосредственно позади своего транспортного средства (либо, в зависимости от типа транспортного средства, мертвые зоны, находящиеся непосредственно перед транспортным средством и/или сбоку от него). Таким образом, водитель не получает заблаговременно информацию о том, что в окружающем пространстве появились новые объекты.
Водитель получает предупреждение о возможности столкновения лишь в ходе дальнейшего движения после определения исходного состояния, когда люди еще больше приблизятся к транспортному средству. Однако к этому моменту водитель может недооценить такое предупреждение, поскольку он не ожидает - применительно к исходному состоянию, определенному при новой остановке, - появления объектов, которых он не может видеть, так как они переместились в окружающее пространство лишь во время маневрирования.
Задачей настоящего изобретения является разработка способа предупреждения столкновений для транспортного средства, обеспечивающего реализацию более совершенной системы предупреждения водителя транспортного средства о наличии объектов в окружающем пространстве.
Раскрытие изобретения
Данная задача решается в настоящем изобретении посредством способа, устройства и компьютерной программы.
Другие варианты осуществления изобретения приведены в зависимых пунктах формулы изобретения.
Одним объектом изобретения является способ предупреждения столкновений для транспортного средства, при осуществлении которого контролируют окружающее пространство. Этот способ включает:
- получение исходного состояния для по меньшей мере одного первого находящегося в окружающем пространстве объекта как ориентира при первом событии остановки, причем исходное состояние включает указание исходного положения по меньшей мере одного первого объекта,
- определение при последующем втором событии остановки того, переместилось ли транспортное средство между первым и вторым событиями остановки на заданное минимальное расстояние и/или прошло ли заданное минимальное время,
- актуализацию исходного состояния посредством указания положения по меньшей мере одного второго находящегося в окружающем пространстве объекта как ориентира, если установлено, что между первым и вторым событиями остановки транспортное средство переместилось на расстояние, превышающее заданное минимальное значение, и/или что прошло время, превышающее заданное минимальное значение,
- определение фактического положения по меньшей мере одного второго объекта в качестве фактического состояния при последующем намерении начать движение,
- обнаружение ситуации возможного столкновения, если сравнение фактического и исходного состояний дает расстояние, превышающее заданное значение.
Благодаря тому, что исходное состояние определяется заново только в том случае, если транспортное средство переместилось между первым и вторым событиями остановки на заданное минимальное расстояние и/или если прошло заданное минимальное время, обеспечивается возможность полного обзора водителем окружающего пространства. Таким образом, исходное состояние включает лишь полученные данные о положении объектов, известных водителю, чем обеспечивается возможность предупреждения водителя о каждом неизвестном ему объекте, переместившемся в окружающее пространство.
Следовательно, если транспортное средство перемещается во время маневрирования лишь на очень малое расстояние, то в соответствии с настоящим изобретением осуществляется не регистрация нового исходного состояния, а использование исходного состояния, зарегистрированного во время предпоследнего события остановки. Если во время маневрирования происходит, например, перемещение людей в пространство вокруг транспортного средства, то в соответствии с настоящим изобретением при новой остановке осуществляется не регистрация этих людей в качестве ориентиров в исходном состоянии, а генерирование предупреждения водителю об этих людях, поскольку они отсутствовали в исходном состоянии, зарегистрированном ранее.
Таким образом, настоящее изобретение обеспечивает надежное информирование водителя об объектах в окружающем пространстве, которые он сам не может видеть, даже в том случае, когда, например, эти объекты перемещаются в окружающем пространстве во время маневрирования на месте для парковки.
При этом можно также предусмотреть, что если транспортное средство не переместилось на заданное минимальное расстояние и не прошло заданное минимальное время, исходное состояние, определенное при первом событии остановки, должно актуализироваться посредством указания положения транспортного средства.
С помощью такой актуализации исходного состояния, определенного при предпоследнем событии остановки, можно учесть относительное смещение между транспортным средством и ориентирами без выдачи ненужных предупредительных сигналов, если, например, транспортное средство приблизилось к объекту, известному водителю, лишь на несколько сантиметров.
В предпочтительном варианте осуществления изобретения заданное минимальное расстояние выбирают таким образом, чтобы оно соответствовало по меньшей мере протяженности не просматриваемой водителем зоны вокруг транспортного средства. Этим обеспечивается регистрация нового исходного состояния только в том случае, если водитель перед остановкой может просматривать все пространство вокруг транспортного средства.
Например, минимальное расстояние можно выбирать таким образом, чтобы оно соответствовало длине транспортного средства либо сумме длины транспортного средства и протяженности окружающего пространства перед транспортным средством и позади него.
В одном варианте осуществления настоящего изобретения контроль пространства вокруг транспортного средства осуществляется с помощью установленных на нем датчиков обнаружения препятствий, включающих в себя ультразвуковые, и/или радарные, и/или лазерные датчики и/или осуществляющих анализ полученного видеоизображения окружающего пространства.
При обнаружении ситуации возможного столкновения водитель может получать предупредительный сигнал, который может быть оптическим, акустическим и/или тактильным. Можно также предусмотреть генерирование различных сигналов для различных ситуаций, например для различных фаз движения (намерение водителя начать движение), различных расстояний до опасного объекта или различных направлений, где возможно столкновение.
Другим объектом изобретения является устройство предупреждения столкновений для транспортного средства, содержащее по меньшей мере один датчик обнаружения препятствий, предназначенный для контроля окружающего пространства. Предлагаемое в изобретении устройство выполнено с возможностью:
- получения исходного состояния для по меньшей мере одного первого находящегося в окружающем пространстве объекта как ориентира при первом событии остановки, причем исходное состояние включает указание исходного положения по меньшей мере одного первого объекта,
- определения при последующем втором событии остановки того, переместилось ли транспортное средство между первым и вторым событиями остановки на заданное минимальное расстояние и/или прошло ли заданное минимальное время,
- актуализации исходного состояния посредством указания положения по меньшей мере одного второго находящегося в окружающем пространстве объекта как ориентира, если установлено, что между первым и вторым событиями остановки транспортное средство переместилось на расстояние, превышающее заданное минимальное значение, и/или что прошло время, превышающее заданное минимальное значение,
- определения фактического положения по меньшей мере одного второго объекта в качестве фактического состояния при последующем намерении начать движение,
- обнаружения ситуации возможного столкновения, если сравнение фактического и исходного состояний дает расстояние, превышающее заданное значение.
Краткое описание чертежей
Предпочтительный вариант осуществления настоящего изобретения иллюстрируются на примере, представленном в приведенном ниже описании с приложенными чертежами. На чертежах показано:
на фиг.1 - схематическое изображение транспортного средства с устройством предупреждения столкновений согласно одному из вариантов осуществления настоящего изобретения,
на фиг.2 - последовательность действий при осуществлении способа предупреждения столкновений согласно одному из вариантов осуществления настоящего изобретения.
Осуществление изобретения
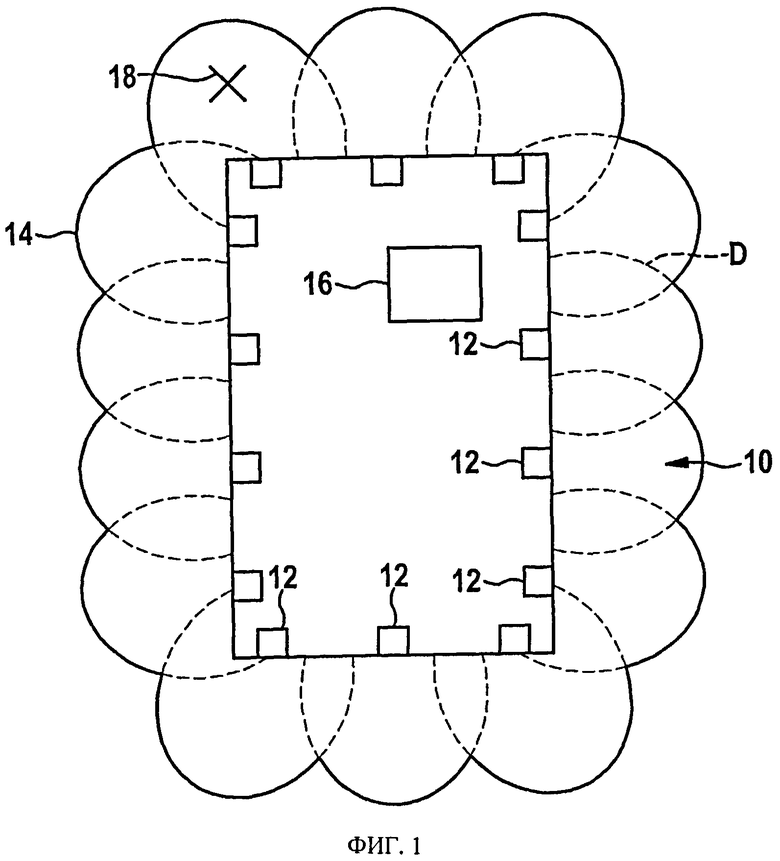
Как видно из фиг.1, транспортное средство 10 оснащено несколькими датчиками 12 обнаружения препятствий, например ультразвуковыми датчиками. Каждый из датчиков 12 имеет рабочую зону D (зону детектирования), указанную на фиг.1 штриховой линией. При этом отдельные рабочие зоны D датчиков 12 перекрываются таким образом, что в сумме они охватывают все окружающее пространство 14 вокруг транспортного средства 10.
Вместо ультразвуковых датчиков можно также использовать радарные, лазерные или любые другие подходящие датчики обнаружения препятствий. Возможно также осуществление контроля окружающего пространства 14 с помощью одной или нескольких видеокамер и использование датчиков 12 для анализа видеоизображения с целью распознавания (идентификации) объектов, находящихся в окружающем пространстве 14. Датчики 12 могут фиксировать присутствие объектов 18 в окружающем пространстве 14 транспортного средства 10 и также могут быть выполнены с возможностью определения расстояний между соответствующим объектом 18 и транспортным средством 10.
С датчиками 12 обнаружения препятствий связан блок 16 управления, определяющий на основании их сигналов положение объекта 18, находящегося в окружающем пространстве 14 транспортного средства 10 и обнаруженного одним из датчиков 12. При этом может устанавливаться факт присутствия или отсутствия объектов 18 в отдельных рабочих зонах D датчиков 12 либо определяться расстояние до каждого объекта 18 от транспортного средства 10 и соответствующее направление, а также положение каждого объекта 18 в подходящей системе координат.
Далее со ссылкой на фиг.2 поясняется принцип действия описанного выше устройства. При этом описываемый ниже способ реализуется в блоке 16 управления. Сначала на шаге S1 проверяется, остановилось ли транспортное средство 10, то есть пришло ли оно в неподвижное состояние. Поскольку способ, соответствующий представленному в настоящем описании примеру осуществления изобретения, может быть реализован только при неподвижном транспортном средстве 10, этот запрос будет повторяться до тех пор, пока не будет установлено, что транспортное средство 10 стоит на месте, т.е. находится без движения.
Если транспортное средство 10 остановилось (альтернатива "да" на шаге S1), то на шаге S2 проверяется, переместилось ли транспортное средство 10 между двумя последними событиями остановки на минимальное расстояние. Это можно осуществить либо путем определения положения транспортного средства 10, например с помощью GPS-приемника, либо, в альтернативном варианте, путем проверки, двигалось ли транспортное средство 10 между двумя последними событиями остановки в течение минимального времени.
При этом минимальное расстояние можно выбрать таким образом, чтобы после перемещения на это расстояние водитель непосредственно перед остановкой транспортного средства 10 мог видеть все непросматриваемое пространство перед транспортным средством 10 и позади него.
Например, минимальное расстояние может в точности соответствовать длине транспортного средства 10, оно может быть равно сумме длины транспортного средства 10 и протяженности не просматриваемого водителем пространства перед транспортным средством 10 и позади него либо сумме длины транспортного средства 10 и протяженности контролируемого датчиками 12 окружающего пространства 14 перед транспортным средством 10 и позади него.
Минимальное время может представлять собой фиксированную заданную величину либо определяться путем деления минимального расстояния (согласно любому из приведенных выше определений) на среднюю скорость движения транспортного средства 10 между двумя последними событиями остановки.
Если между двумя последними событиями остановки транспортное средство 10 переместилось по меньшей мере на минимальное расстояние (альтернатива "да" на шаге S2), то вслед за этим на шаге S3 регистрируется исходное состояние путем определения исходного положения. Для этого с помощью датчиков 12 определяется исходное положение одного или нескольких объектов 18 в окружающем пространстве 14 транспортного средства 10. При этом получение данных об исходном положении объекта 18 может включать установление факта присутствия объекта в рабочей зоне D датчика 12 и/или определение расстояния до объекта 18 от транспортного средства 10 и/или направления до объекта 18 от транспортного средства 10.
Если при определении исходного состояния в окружающем пространстве 14 отсутствуют объекты 18, то данные об исходном положении не могут быть получены описанным выше образом. В этом случае в качестве данных об исходном положении могут быть использованы одно или несколько значений расстояния, которые, например, для каждой рабочей зоны D датчиков 12 равны длине соответствующей рабочей зоны D.
Если на шаге S2 обнаруживается, что между двумя последними событиями остановки транспортное средство 10 переместилось на расстояние, меньшее минимального (альтернатива "нет" на шаге S2), то на шаге S4 осуществляется согласование исходного состояния, определенного при последней остановке, с новым положением транспортного средства 10.
При этом новое положение транспортного средства 10 может быть определено с помощью GPS-датчика или посредством оценки расстояния, пройденного между двумя последними событиями остановки (путем определения времени, скорости и угла рыскания). Данные об исходном положении, сохраненные в запоминающем устройстве, могут быть пересчитаны - путем сложения векторов расстояний, пройденных транспортным средством 10 между двумя последними событиями остановки, - в расстояния до объектов 18 от транспортного средства 10, согласованные с его новым положением. Если данные об исходном положении лишь устанавливают факт присутствия или отсутствия объектов 18 в соответствующих рабочих зонах D датчиков 12, то можно оценить возможность появления после этого объекта 18 в рабочей зоне D другого датчика 12 в результате движения транспортного средства 10.
После этого на шаге S5 определяется фактическое положение. Этот шаг выполняется через заданные промежутки времени или в случае заранее определенных событий, например при намерении водителя начать движение, распознаваемом по положению педали тормоза и/или педали газа и/или положению приводной тяги коробки передач с ручным или автоматическим переключением.
При этом устанавливается факт присутствия и/или определяется фактическое положение объектов 18 в окружающем пространстве 14. Здесь, как и в случае определения исходного состояния на шаге S3, можно определить фактическое положение объектов 18 в подходящей системе координат либо расстояния и направления до объектов 18 от транспортного средства 10.
На шаге S6 путем сравнения фактического и исходного состояний определяется, приблизился ли к транспортному средству 10 по меньшей мере один объект 18. Это определение распространяется как на случай, когда объект 18, уже находившийся в окружающем пространстве 14 транспортного средства 10 при регистрации исходного состояния, переместился в направлении транспортного средства 10, так и на случай, когда объект 18, отсутствовавший в окружающем пространстве 14 транспортного средства 10 при регистрации исходного состояния, переместился в окружающее пространство 14.
Если к транспортному средству 10 не приблизился ни один объект 18 (альтернатива "нет" на шаге S6), то процесс завершается, поскольку не идентифицируется опасность столкновения.
Если на шаге S6 обнаруживается, что к транспортному средству 10 приблизился по меньшей мере один объект 18 (альтернатива "да" на шаге S6), то идентифицируется опасность столкновения и на шаге S7 для водителя генерируется акустический, оптический и/или тактильный предупредительный сигнал.
Описанный выше процесс выполняется во время эксплуатации транспортного средства 10 непрерывным и циклическим образом. Следовательно, при остановке транспортного средства 10 может быть многократно определено соответствующее фактическое состояние, которое сравнивается с исходным состоянием.
Существует возможность генерирования различных предупредительных сигналов в зависимости от различных ситуаций, возникающих при движении транспортного средства 10. Так, например, первый предупредительный сигнал может поступать при остановке транспортного средства 10, если выявлена опасность столкновения, а второй предупредительный сигнал может выдаваться, если дополнительно обнаружено намерение водителя начать движение.
Изобретение предназначено для предупреждения столкновений транспортных средств. При контроле окружающего пространства получают исходное состояние для одного первого находящегося в окружающем пространстве (14) объекта (18) как ориентира при первом событии остановки, причем исходное состояние включает указание исходного положения одного первого объекта (18). Определяют (S2) при последующем втором событии остановки (S1), переместилось ли транспортное средство (10) между первым и вторым событиями остановки на заданное минимальное расстояние и/или прошло ли заданное минимальное время. Актуализируют (S3) исходное состояние посредством указания положения по меньшей мере одного второго находящегося в окружающем пространстве (14) объекта (18) как ориентира, если установлено, что между первым и вторым событиями остановки транспортное средство (10) переместилось на расстояние, превышающее заданное минимальное значение, и/или что прошло время, превышающее заданное минимальное значение. Определяют (S5) фактическое положение одного второго объекта (18) в качестве фактического состояния при последующем намерении начать движение. Обнаруживают (S6) ситуацию возможного столкновения, если сравнение фактического и исходного состояний дает расстояние, превышающее заданное значение. Изобретение также относится к устройству для предупреждения столкновений. Достигается предупреждение водителя о наличии объектов в окружающем пространстве. 2 н. и 6 з.п. ф-лы, 2 ил.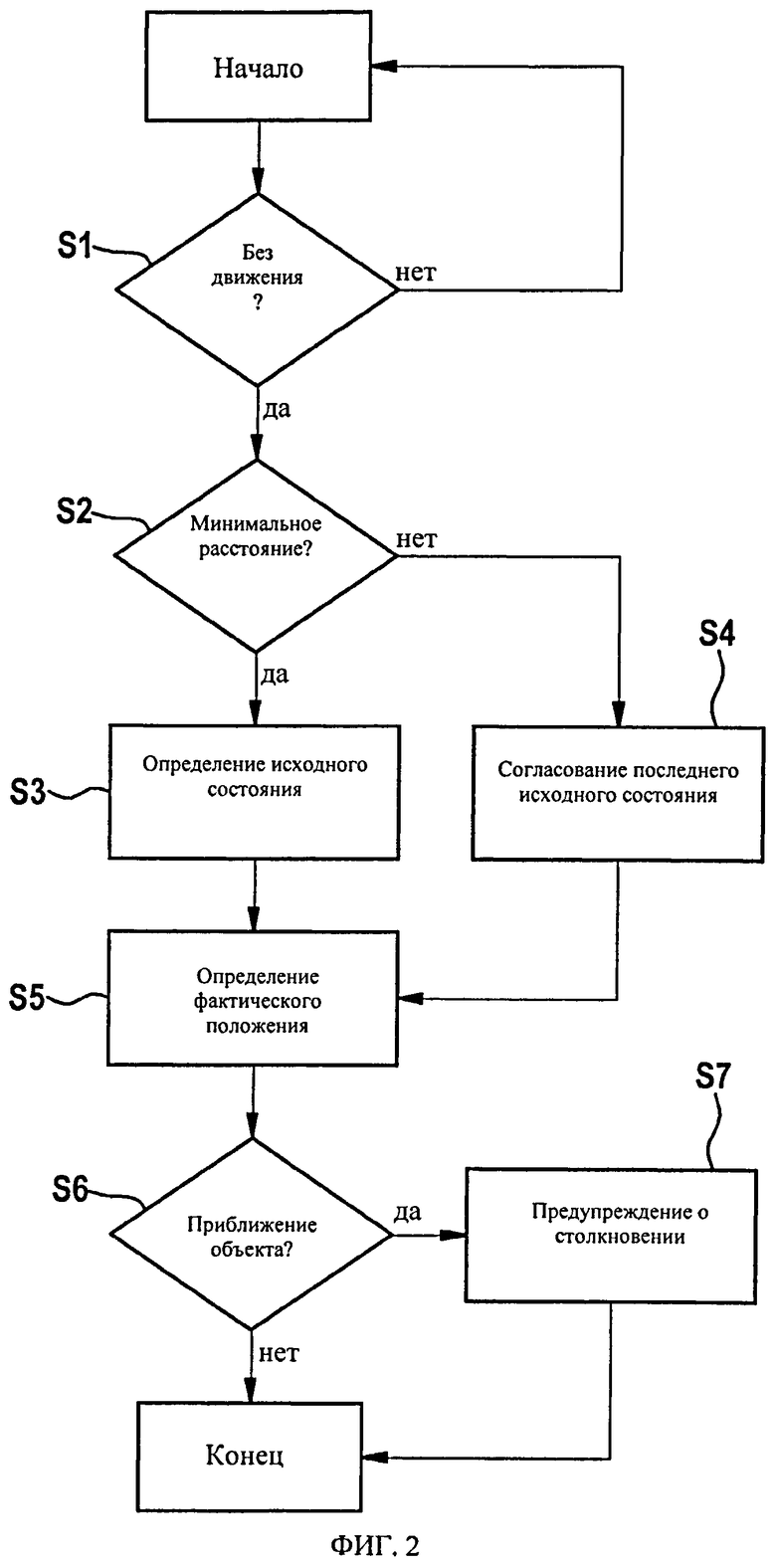
1. Способ предупреждения столкновений для транспортного средства (10), при осуществлении которого контролируют окружающее пространство (14), включающий:
- получение исходного состояния для по меньшей мере одного первого находящегося в окружающем пространстве (14) объекта (18) как ориентира при первом событии остановки, причем исходное состояние включает указание исходного положения по меньшей мере одного первого объекта (18),
- определение (S2) при последующем втором событии остановки (S1) того, переместилось ли транспортное средство (10) между первым и вторым событиями остановки на заданное минимальное расстояние и/или прошло ли заданное минимальное время,
- актуализацию (S3) исходного состояния посредством указания положения по меньшей мере одного второго находящегося в окружающем пространстве (14) объекта (18) как ориентира, если установлено, что между первым и вторым событиями остановки транспортное средство (10) переместилось на расстояние, превышающее заданное минимальное значение, и/или что прошло время, превышающее заданное минимальное значение,
- определение (S5) фактического положения по меньшей мере одного второго объекта (18) в качестве фактического состояния при последующем намерении начать движение,
- обнаружение (S6) ситуации возможного столкновения, если сравнение фактического и исходного состояний дает расстояние, превышающее заданное значение.
2. Способ по п.1, отличающийся тем, что если транспортное средство (10) не переместилось на заданное минимальное расстояние и не прошло заданное минимальное время, исходное состояние, определенное при первом событии остановки, актуализируют указанием о положении транспортного средства (10).
3. Способ по п.1, отличающийся тем, что заданное минимальное расстояние выбирают таким образом, чтобы оно соответствовало по меньшей мере протяженности не просматриваемой водителем зоны вокруг транспортного средства (10).
4. Способ по п.1, отличающийся тем, что заданное минимальное расстояние соответствует длине транспортного средства (10).
5. Способ по одному из пп.1-3, отличающийся тем, что заданное минимальное расстояние соответствует сумме длины транспортного средства (10) и протяженности окружающего пространства (14) перед транспортным средством (10) и позади него.
6. Способ по одному из пп.1-3, отличающийся тем, что контроль окружающего пространства (14) осуществлют с помощью установленных на транспортном средстве (10) датчиков (12) обнаружения препятствий, включающих в себя ультразвуковые, и/или радарные, и/или лазерные датчики и/или осуществляющих анализ видеоизображения окружающего пространства (14).
7. Способ по одному из пп.1-3, отличающийся тем, что при обнаружении (S6) ситуации возможного столкновения водителю выдают предупредительный сигнал (S7).
8. Устройство предупреждения столкновений для транспортного средства (10), содержащее по меньшей мере один датчик (12) обнаружения препятствий, предназначенный для контроля окружающего пространства (14), и выполненное с возможностью:
- получения исходного состояния для по меньшей мере одного первого находящегося в окружающем пространстве (14) объекта (18) как ориентира при первом событии остановки, причем исходное состояние включает указание исходного положения по меньшей мере одного первого объекта (18),
- определения (S2) при последующем втором событии остановки (S1) того, переместилось ли транспортное средство (10) между первым и вторым событиями остановки на заданное минимальное расстояние и/или прошло ли заданное минимальное время,
- актуализации (S3) исходного состояния посредством указания положения по меньшей мере одного второго находящегося в окружающем пространстве (14) объекта (18) как ориентира, если установлено, что между первым и вторым событиями остановки транспортное средство (10) переместилось на расстояние, превышающее заданное минимальное значение, и/или что прошло время, превышающее заданное минимальное значение,
- определения (S5) фактического положения по меньшей мере одного второго объекта (18) в качестве фактического состояния при последующем намерении начать движение,
- обнаружения (S6) ситуации возможного столкновения, если сравнение фактического и исходного состояний дает расстояние, превышающее заданное значение.
| DE 102006002232 A1, 19.07.2007 | |||
| DE 102007030769 A1, 08.01.2009 | |||
| RU 2003120811 A, 10.02.2005 |

