Настоящее изобретение относится к области прикладного телевидения с использованием регистрации излученного или отраженного лучистого (светового) потока от объектов в разных зонах оптического спектра для решения задач контроля и анализа состояния объектов по их телевизионным (ТВ) изображениям. Способ предназначается для измерения относительной скорости движения объектов на основе двумерных изображений, формируемых с помощью монокулярных черно-белых, цветных, спектрозональных, тепловизионных или иных ТВ камер. Изобретение может найти применение в различных областях науки и техники, производственных процессах, а именно в системах автоматики, технического зрения, распознавания образов, робототехнике, при решении задач дистанционного контроля и управления процессом движения объектов.
Возникновение ТВ автоматики обусловлено непрерывно возрастающей тенденцией автоматизации контроля, измерения или управления различными процессами. В настоящее время наблюдается резкое возрастание удельного веса таких систем и устройств в связи с обновлением элементной базы в телевидении, миниатюризации и возможности широкого использования высокопроизводительных средств вычислительной техники. Главной особенностью прикладных систем телевидения является возможность их отнесения к средствам пассивной локации по сравнению с известными активными системами локации, например лазерными дальномерами и более энергоемкими, громоздкими радиолокационными системами. Неоспоримым достоинством ТВ методов и устройств является их скрытность, по сравнению с активными системами локации, мобильность, возможность проведения измерений без своего обнаружения на некооперируемых объектах, а также объектах, находящихся в движении, или в условиях, труднодоступных и опасных для человека.
Существует большое число разновидностей прикладных ТВ систем и устройств, решающих задачи по распознаванию объектов в наблюдаемом пространстве. Известны ТВ системы, на которые возложены задачи, связанные с определением геометрических параметров объектов (высоты, длины, ширины, конфигурации, площади и т.д.), подсчета их числа, измерения дальности до объектов или скорости их движения, а также угловых координат и их производных, контроля изменения цвета объекта и т.д.
Большинство этих решений содержится в следующих работах: Полоник B.C. Телевизионные автоматические устройства. - М.: Связь, 1974, - 216 с. [1], Барсуков Ф.И., Величкин А.И. Сухарев А.Д. Телевизионные системы летательных аппаратов / Под ред. А.И. Величкина. - М.: Сов. Радио. 1979, - 256 с. [2], Горелик С.Л., Кац Б.М., Киврин В.H. Телевизионные измерительные системы. - М.: Связь, 1980, - 168 с. [3], Зубарев Ю.Б., Сагдуллаев Ю.С. Спектральная селекция оптических изображений Ташкент. Фан, 1987, 108 с. [4], Системы технического зрения: Справочник / В.И. Сырямкин, В.С. Титов, Ю.Г. Якушенков и др.; Под общей редакцией В.И. Сырямкина, В.С. Титова. Томск: МГП "РАСКО", 1993. 367 с. [5], Распознавание оптических изображений / Под общей ред. Ю.С. Сагдуллаева, В.С. Титова. - Ташкент: ТЭИС, 2000, - 315 с. [6], Никитин В.В., Цыцулин А.К. Телевидение в системах физической защиты. Учеб. пособие. - СПб., Изд-во СПбГЭТУ "ЛЭТИ", 2001, - 135 с. [7] и др.
Для измерения относительной скорости движения объектов необходимо знать их дальность на моменты времени замеров t1 и t2. Известны способы и устройства для измерения дальности объектов. Так, например, способ, основанный на сравнении затухания лучистости в различных спектральных зонах, за счет поглощающего действия дистанционной среды. Для использования данного способа надо знать точные спектральные характеристики собственного теплового излучения объектов (Молебный В.В. Оптико-локационная система. Основы функционального построения. - М.: Машиностроение, 1981, - 181 с. [8]).
Данный способ обладает большой погрешностью измерений и имеет ограниченное применение, поскольку собственное тепловое излучение объектов и состояние дистанционной среды подвержены временным вариациям, которые практически трудно учесть.
Известны способы и системы стереотелевидения, которые можно использовать для измерения дальности объектов (Шмаков П.В. Стереотелевидение. - М.: Связь, 1968, - 298 с. [9]). Стереотелевизионная камера включает два ТВ датчика, которые разнесены между собой на некоторое базисное расстояние В0. Применение такой камеры увеличивает энергопотребление, габаритно-весовые показатели системы, что особенно проявляется в случае увеличения базисного расстояния между отдельными датчиками. Это в ряде случаев ограничивает и затрудняет их практическое использование, когда минимальные весовые и габаритные показатели системы очень важны и выходят на первое место, например, в космической практике.
Заслуживает внимания принцип ТВ контроля дальности, предназначенный для предупреждения столкновений или автоматического обнаружения объектов на заданной дальности в поле зрения охранной системы (Усовершенствованный дальномер. Пат. 1605013, Великобритания. Заявл. 14.03.75 №10842/75, опубл. 16.12.81. МКИ G01S 11/00 [10]). Данный ТВ дальномер использует принцип и свойства расфокусированного изображения, когда объектив монокулярной ТВ камеры сфокусирован на определенное конечное расстояние, а видеосигнал с выхода ТВ камеры пропускают через один или несколько полосовых фильтров и формируемые сигналы поступают на пороговые устройства. Они срабатывают при превышении сигналов некоторого порогового уровня. Преимущества данного принципа измерения дальности заключаются в том, что априорные сведения о параметрах объектов практически не нужны. Вместе с тем, следует отметить, что точность измерения произвольной (не фиксированной) дальности объектов сравнительно низка и требует увеличения числа полосовых фильтров, повышения помехоустойчивости и точности преобразования сигналов.
Известны пути реализации дальномеров с использованием ТВ средств. Так, например, в работе Кравец В.Г., Любинский В.Е. Основы управления космическими полетами. - М.: Машиностроение, 1983, - 224 с. [11]. В этой работе показано, что видеоинформация, формируемая внешними ТВ камерами космических аппаратов (КА), может быть использована как для наблюдения изображений КА, так и для определения их относительной дальности и скорости в процессах их сближения.
То есть, в данном случае, на одну ТВ камеру возлагается выполнение двух функций - информационной и измерительной. Для этого на экран видеоконтрольного устройства (ВКУ) наносится соответствующая координатная сетка (электрическим или механическим путем). При контроле дальности КА с использованием координатной сетки исходят из того, что в зависимости от искомой дальности изображение КА на экране ВКУ будет занимать определенное число клеток координатной сетки.
Зная характерные линейные размеры КА (например, его диаметр), а также фокусное расстояние объектива ТВ камеры, можно предварительно по известным формулам рассчитать и представить в виде графика или табличных данных значение искомой дальности от числа клеток координатной сетки. Являясь самым простым способом ТВ измерений относительной дальности объектов, он не обладает высокой точностью, требует непосредственного участия оператора и не позволяет автоматизировать процесс отображения измеряемых параметров на экране ВКУ совместно с изображением объекта (например, с изображением сближающегося КА).
Известен патент РФ на изобретение №2381521 на способ измерения дальности и линейных размеров объектов по их телевизионным изображениям / авторы Вилкова Н.Н., Зубарев Ю.Б., Сагдуллаев Ю.С. - приоритет от 14.04.2008 г. - опубл. 10.02.2010 г. Бюл.4. [12]. Он позволяет определять дальность до объектов при неизвестных их линейных размерах.
В качестве наиболее близкого аналога заявляемого изобретения по совокупности признаков и операций над сигналами принят способ измерения относительной дальности и скорости, отраженный в монографии Сагдуллаева Ю.С., Абдуллаева Д.А., Смирнова А.И. Основы телевизионного контроля процесса сближения космических аппаратов. Изд-во ФАН АН РУз. Ташкент, 1997, 127 с. [13].
В данной работе показаны принципы измерения параметров объектов (в статике или динамике) на основе двумерных ТВ изображений. Как известно, захват пространства наблюдения составляет величину

или для отдельного объекта из некоторого множества {N}

где: X - максимальный размер рабочей светочувствительной поверхности преобразователя лучистого поток в телевизионный сигнал (ПЗС-матрицы и др.);
L - максимальный захват пространства;
x0 - размер оптической проекции наблюдаемого объекта на светочувствительной поверхности преобразователя лучистого поток в телевизионный сигнал;
F - фокусное расстояние объектива ТВ камеры;
L0 - линейный размер объекта в направлении строки или кадра ТВ изображения.
Определение величины ρ в соответствии с (2) требует наличия априорных сведений о линейных размерах наблюдаемого объекта при известном фокусном расстоянии объектива.
Линейный размер оптического изображения наблюдаемого объекта на светочувствительной поверхности (мишени) ТВ датчика может быть представлен в виде

где Δtи - временной интервал развертки изображения объекта (Δtис - по строке, Δtик - по кадру); Δtр - временной интервал развертки электронного луча на мишени или считывания видеоинформации (Δtрс - по строке, (Δtрк - по кадру).
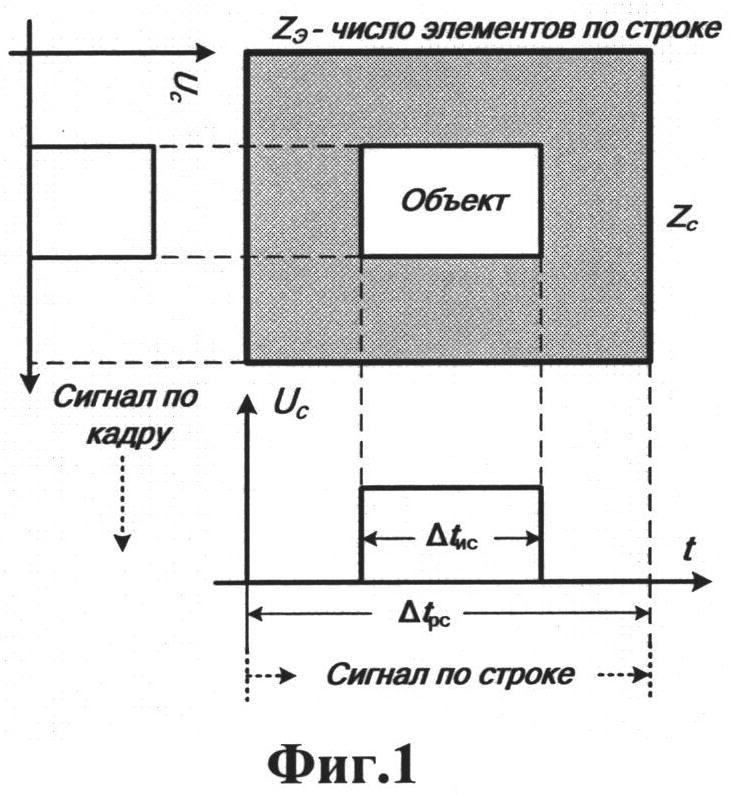
На фиг.1 показан вид сигналов и их длительности по строке и кадру для двуградационыого ТВ изображения произвольного объекта. В зависимости от условий наблюдения эти длительности (Δtис - по строке, Δtик - по кадру) могут быть постоянными или изменяющимися во времени (увеличивающими или уменьшающими). Измерение величины Δtи может быть осуществлено различными методами, например стробированием серией импульсов N с периодом следования T0. При этом длительность ТВ сигналов изображения объекта может быть представлена в виде определенного числа стробирующих импульсов заданной частоты

Преобразование временного интервала Δtи в число импульсов N может осуществляться как по кадру (вертикали), так и в горизонтальном направлении (по строке). Ошибки, связанные с преобразованием временного интервала Δtи согласно (4), обуславливаются разрешающей способностью ТВ камеры (числом элементов разложения) и выбранной частотой счетных импульсов. В то время как разрешающая способность по вертикали зависит только от числа строк Zc в ТВ растре, по горизонтали она определяется самой высокочастотной составляющей самого ТВ сигнала.
Возникающая погрешность измерения за счет дискретности счетных импульсов при определении длительности импульса Δtи в направлении строки или кадра в общем случае может быть неодинаковой и будет зависеть от частоты следования стробирующих импульсов. Уменьшение длительности самих сигналов (за счет удаления объекта или малых его размеров и т.д.) в направлении строчной или кадровой разверток будет приводить к большим ошибкам при постоянных величинах правой части выражения (4), что должно учитываться при обработке сигналов измерений., определяющее линейный размер наблюдаемого объекта в ТВ изображении, составит величину

а искомая дальность

В соответствии с выражением (6) могут быть определены требования к параметрам ТВ камеры для селекции объектов заданных пространственных признаков в наблюдаемом пространстве.
При заданных величинах F, Lo, Δtр, X, T0 (которые априорно известны) искомое расстояние до объекта (6) может быть найдено, исходя из выражения

где C - постоянная величина, значение которой априорно известно и может быть использовано при вычислении дальности.

При известной дальности ρ1 и ρ2 вычисленной согласно (7) на момент времени t1 и t2 можно определить относительную скорость

при этом значения дальности до объекта для времени t1 и t2 составляют величину

где: ρ1и(t) и ρ2и(t) измеренные значения дальности, Δρ1(t) и Δρ2(t) погрешность измерения дальности на момент времени t1 и t2.
В соответствии с (10) максимальная погрешность измерения относительной скорости объектов будет наступать при разных знаках погрешности измерения дальности на момент времени t1 и t2. Это является первым недостатком рассматриваемого способа измерения относительной дальности и на их основе - относительной скорости движения объектов.
Представим истинное значение длительности сигналов, которое должно приходиться на наблюдаемое ТВ изображение объекта, в виде числа элементов

где ΔZi - число полученных элементов (пикселей), приходящихся на изображение объекта при селекции и формировании измерительного сигнала; ΔZ' - ошибка в определении истинного числа элементов, которая включает все возможные факторы, с использованием ТВ метода, средств измерения дальности объектов и т.д.
Определим необходимую точность в измерении величины ΔZi, для обеспечения заданной погрешности измерения дальности. Относительная погрешность в определении ΔZi, равна

С учетом (11) запишем, что

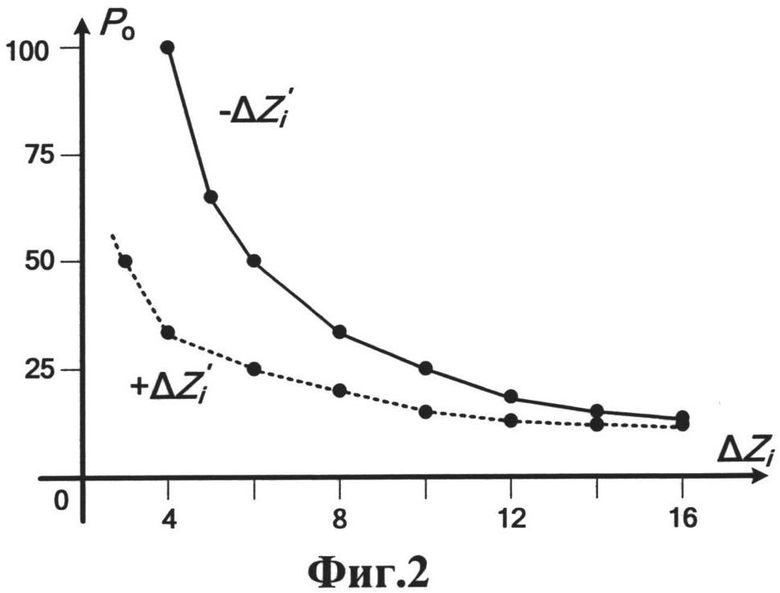
В соответствии с (13) на фиг.2 показана относительная погрешность измерения дальности Po при значениях ошибки в определении истинного числа строк (элементов), равной величине ΔZ'=±2 и минимальной длительности сигналов изображений объекта, например, соответствующей от 4 до 16 элементов (пикселей). Соответственно, при таких условиях, определение относительной скорости приведет к еще большей погрешности измерений. Как видно из фиг.2, погрешность измерения будет максимальна на участке расстояний, когда изображение объекта занимает несколько элементов (пикселей) в ТВ изображении. Ошибка определения истинного значения величины при положительном приращении ΔZ' вносит меньшую погрешность в измерение расстояний до объекта. С другой стороны, когда изображение объекта занимает большое число элементов и их число максимально в ТВ растре, погрешность измерения будет минимальной. Таким образом, за счет особенностей ТВ метода измерений погрешность измерений будет не одинаковой для всего диапазона дальностей. Ввиду этого может быть недопустимо высокая погрешность измерений при больших и средних значениях дальности.
Устранение данного недостатка возможно путем введения переменной величины времени замера Δti, исходя из текущей дальности нахождения объекта ρi(t) (или размеров его изображения).
Технический результат - повышение точности телевизионных измерений относительной скорости движения объектов на больших и средних расстояниях.
Технический результат достигается тем, что в способе измерения скорости объектов по их ТВ изображениям, включающем формирование сигнала телевизионного изображения объекта с известным линейным размером L0 и находящегося на расстоянии ρ1(t)=(L0·F)/x1 от телевизионной камеры с объективом, имеющим фокусное расстояние F, при этом размер оптической проекции наблюдаемого объекта на поверхности преобразователя лучистого поток в телевизионный сигнал равен x1=X·Δt1/Δtp для первого телевизионного изображения объекта, где X - максимальный размер рабочей светочувствительной поверхности преобразователя лучистого поток в телевизионный сигнал, Δtp - временной интервал развертки для рабочей поверхности преобразователя лучистого поток в телевизионный сигнал, характеризующейся числом активных элементов или строк, равных величине Z, а длительность сигнала телевизионного изображения объекта Δt1, равна числу элементов или строк ΔZ1, приходящихся на изображение объекта, определение длительности сигнала изображения объекта Δt1 и его стробирование серией импульсов N1 с периодом следования T0, при этом Δt1=N1·T0, определение первого значения дальности ρ1(t1)=C/N1, где C - постоянная величина, значение которой априорно известно и может быть использовано при вычислении дальности, C=(Lo·F·Δtp)/(X·To), фиксацию полученных данных и определение второго значения дальности ρ2(t), в отличие от известного при определении второго значения дальности до объекта, задают дополнительное число импульсов ΔNзад, которое зависит от ρ1(t1) и заданной погрешности определения скорости, определяют количество стробирующих импульсов для определения второго значения дальности N2=N1±ΔNзад. и второе значение дальности ρ2 (t1+i)=С/N2, измеряют количество стробирующих импульсов текущего изображения объекта N∗2, определяют значение 
Введение фиксированной величины превышения или уменьшения числа импульсов для дальности ρ2(t), над числом импульсов для дальности ρ1(t), выраженной в постоянном числе используемых дополнительных импульсов ±ΔNзад., позволяет определить свое значение времени Δti для проведения измерений по определению относительной скорости. Использование автоматически формируемого значения Δti позволяет повысить точность измерений при больших и средних значениях дальности.
С другой стороны, исключение в данном способе, по сравнению с известным, операции непосредственного нахождения второй дальности ρ2(t), позволяет устранить погрешность, равную величине ±Δρ2(t), связанную с измерением второй дальности ρ2(t)= ρ2и(t)±Δρ2(t).
Технический результат достигается за счет формирования переменного времени измерения Δti в зависимости от текущей дальности нахождения объектов (текущих размеров изображения) на начальный момент времени измерения t1.
Суть изобретения поясняются следующими материалами:
на фиг.1 показан вид сигналов и их длительности по строке и кадру для двуградационного ТВ изображения произвольного объекта;
на фиг.2 показана относительная погрешность измерения дальности Po при значениях ошибки в определении истинного числа строк (элементов), равной величине ΔZ'=±2 и минимальной длительности сигналов изображений объекта, например, соответствующей от 4 до 16 элементов (пикселей);
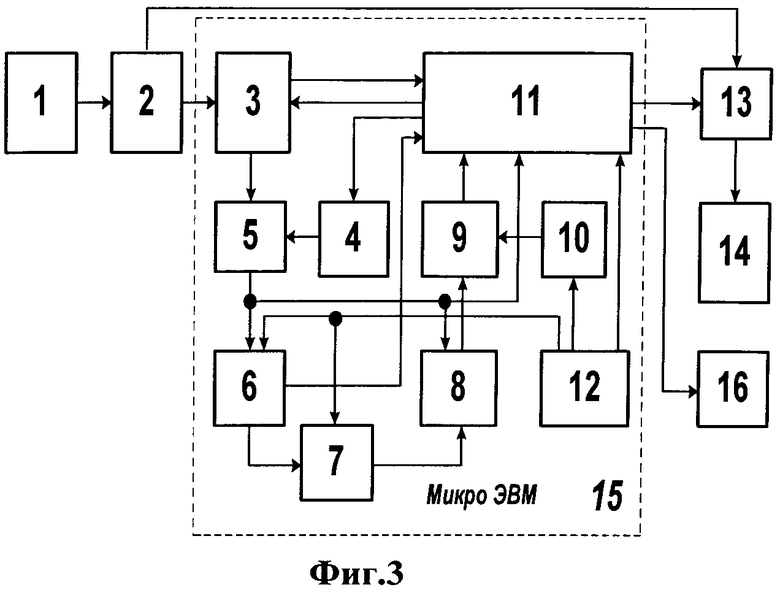
на фиг.3, в качестве примера, показана структурная схема ТВ устройства для измерения относительной скорости движения объектов;
В табл.1 показана зависимость между дальностью, числом элементов (пикселей), линейными размерами объектов в ТВ изображении при различных значениях фокусного расстояния объектива.
Представленные расчетные данные в табл.1 показывают следующее. При принятых значениях для линейного размера объекта, равного L0=1 м, фокусного расстояния объектива F=50 мм и максимальном размере рабочей поверхности фотомишени ТВ датчика X=10 мм дальность до объекта с размером ТВ изображения всего в два элемента ΔZ=2 будет максимальной и составит 1,47 км. При больших размерах ТВ изображения объекта, когда число элементов равно ΔZ=550, измеряемая дальность до объекта будет минимальной и равна 5,22 м.
Допустим, для примера, что максимальное число стробирующих импульсов Nmax равно числу элементов ТВ изображения, то есть Nmax=Z. Рассмотрим случай, когда изображение целевого объекта на момент времени t1 занимает ΔZ=3 элемента, то есть число импульсов N1=ΔZ=3, что в результате измерения первой дальности ρ1(t) может дать расстояние 950 метров [табл.1, F=50 мм, L0=1 м]. Далее примем, что дополнительно задаваемое фиксированное число импульсов ΔNзад.=7. Тогда число импульсов N2=N1+ΔNзад.=3+7=10, при этом N2=ΔZ=10.
Исходя из табл.1 для числа элементов, равного ΔZ=10, находим дальность, которая составляет величину ρ2(t)=287 метров, Δρ=[ρ1(t)- ρ2(t)]=663 метра и искомая относительная скорость будет равна величине
ρ'(t)=Δρ/Δti=663/Δti
В зависимости от скорости относительного движения объектов величина Δti будет большей или меньшей величиной в процессе проведения замеров от ρмах(t) до ρмин(t) - приближение объекта или ρмин(t) до ρмах(t) - удаление объекта.
Приведенная на фиг.3 структурная схема ТВ устройства для измерения относительной скорости движения объектов реализует предлагаемый способ измерения относительной скорости движения объектов по их телевизионным изображениям.
Она содержит в своем составе: ТВ камеру (источник ТВ сигнала) 1, видеоусилитель 2, блок селекции сигнала изображения и формирователь измерительного сигнала 3, генератор тактовых импульсов 4, логическую схему "И" 5, коммутатор 6, блок памяти 7, схему вычитания числа импульсов 8, схему сравнения (совпадения) числа импульсов 9, источник числа задаваемых импульсов 10, центральный процессор (вычислительное устройство) 11, блок управления 12, сумматор сигналов 13, видеоконтрольное устройство 14. Фактически блоки 3-12 могут рассматриваться как составляющие некоторой специализированной микро ЭВМ 15.
Важнейшим компонентом, входящим в состав блока измерения, является центральный процессор 11, который характеризуется определенными параметрами: быстродействием, разрядностью, числом программно доступных регистров и т.д. и выполняет арифметические, логические и другие операции, обработку сигналов от устройств ввода-вывода и др. Имеет определенный объем памяти ОЗУ и ПЗУ. Для вычисления относительной скорости движения объектов используется специальная программа. После окончания цикла измерений результаты измерений могут сохраняться в оперативной памяти или стираться. Обрабатываемые данные из центрального процессора выводятся для отображения на экране ВКУ в виде упорядоченной информации, содержащей результаты измерения, время, если необходимо - графики, характеризующие результаты измерения во времени и т.д. Использование режима синхронизации в блоке измерения параметров 11 с ТВ сигналом позволяет отобразить измерительную информацию с любым стандартным видеосигналом на экране одного ВКУ.
Рассмотрим процесс работы ТВ устройства для измерения относительной скорости движения объектов. Надо отметить, что ТВ камера в своем составе имеет типовые элементы и блоки для формирования сигналов ТВ изображений. Когда объект контроля находится в поле зрения ТВ камеры, он отражает или излучает лучистый поток. С помощью объектива ТВ камеры, имеющего фокусное расстояние F, лучистый поток проецируется на светочувствительную поверхность (фотомишень) ТВ датчика с рабочим размером X, через оптический фильтр с выбранной спектральной характеристикой, при этом размер оптической проекции наблюдаемого объекта на поверхности ТВ датчика характеризуется величиной x1, размер которой зависит от искомой дальности.
После преобразования входного потока с помощью преобразователя лучистого поток в телевизионный сигнал - в сигнал изображения, он поступает на усилитель 2. В этом усилителе осуществляется коррекция и усиление сигнала изображения до необходимого уровня и далее с первого выхода видеосигнал поступает на сумматор 13, а с второго выхода на первый вход блока селекции сигнала изображения и формирователя измерительного сигнала 3, который взаимодействует с процессором 11. С выхода блока 3 измерительный сигнал, в виде прямоугольного импульса по строке или кадру ТВ изображения объекта поступает на первый вход логической схемы "И" 5, где на второй ее вход поступают импульсы от генератора тактовых импульсов 4, для стробирования измерительного сигнала (ИС) длительностью Δti серией импульсов Ni с периодом следования T0, при этом Δti=Ni·T0. Блок 4 вырабатывает импульсы, которые имеют синхронизацию с блоком 11.
На выходе схемы 5 образуется некоторое число импульсов, равное величине Ni в соответствии с длительностью ИС и их число обратно пропорционально искомой дальности. С выхода схемы 5, образованное число импульсов Ni через коммутатор 6 поступает на блок памяти 7 и далее на первый вход схемы вычитания импульсов 8. Кроме того, со второго выхода коммутатора образованное число импульсов Ni поступает на первый вход процессора 11, для вычисления первого (предыдущего) значения дальности ρ1(t1)=C/N1, при этом Ni=N1, а C - постоянная величина, значение которой априорно известно и используется при вычислении дальности C=(L0·F·Δtp)/(X·T0). Момент времени t1 для измерения дальности ρ1(t) наступает после подачи управляющего сигнала с блока 12 на начало работы коммутатора 6, блока памяти 7 и процессора 11.
Далее наступает второй этап работы ТВ устройства, связанный с формированием времени второго замера t2i. Для этого некоторое число импульсов, равное величине Ni поступает также на второй вход схемы вычитания импульсов 8. С выхода блока памяти 7 на первый вход схемы 8 поступает запомненное, для момента времени t1, число импульсов, равное величине N1. При наступлении соотношения, когда |Ni-N1|≥1, 2, 3 и т.д., сигнал с выходы схемы вычитания 8 в виде некоторого числа импульсов, равных величине ΔN поступает на схему сравнения 9, на второй вход которой поступает сигнал задаваемого числа импульсов от источника 10, число которых может изменяться по команде с блока 12.
При достижении на выходе схемы 8 числа импульсов, равных величине |Ni-N1|=ΔNзад с выхода схемы 9 формируется управляющий сигнал для фиксации времени замера t1+i, который поступает на второй вход микропроцессора 11, в котором на основе табличных данных хранится информации о дальности объекта при числе импульсов, равных N2=N1±ΔNзад.
То есть, при достижении величины ΔN=ΔNзад фиксируется второе (последующее) время отсчета t1+i и в микропроцессоре 11 определяется интервал времени Δti=t1+i-ti, далее для ранее измеренного значения первой дальности ρ1(t) и выбранного числа дополнительных импульсов ΔNзад по заранее рассчитанным табличным данным, хранящимся в памяти измерителя для величины N2=N1±ΔNзад находится значение второй дальности ρ2(t), после чего определяется относительная скорость движения объектов согласно выражению
ρ'(t1+i)=[ρ1(ti)-ρ2(t1+i)]/(t1+i-ti)
Полученные результаты измерений с первого выхода блока 11 подаются на вход сумматора сигналов 13, с выхода которого поступают на вход ВКУ 14 и отображаются на экране в виде численных данных (графиков) для визуального анализа оператором. Со второго выхода блока 11 полученные данные могут поступать к внешним потребителям информации 16, для управления другими устройствами.
Литература
1. Полоник B.C. Телевизионные автоматические устройства. М.: Связь, 1974, 216 с.
2. Барсуков Ф.И., Величкин А.И. Сухарев А.Д. Телевизионные системы летательных аппаратов / Под ред. А.И. Величкина. М.: Сов. Радио. 1979, 256 с.
3. Горелик С.Л., Кац Б.М., Киврин В.Н. Телевизионные измерительные системы. - М.: Связь, 1980, - 168 с.
4. Зубарев Ю.Б., Сагдуллаев Ю.С. Спектральная селекция оптических изображений. Ташкент. Фан, 1987, 108 с.
5. Системы технического зрения: Справочник / В.И. Сырямкин, В.С. Титов, Ю.Г. Якушенков и др. Под общей редакцией В.И. Сырямкина, В.С. Титова. Томск: МГП "РАСКО", 1993, 367 с.
6. Распознавание оптических изображений /Под ред. Ю.С. Сагдуллаева, В.С. Титова. Ташкент: ТЭИС, 2000, 315 с.
7. Никитин В.В., Цыцулин А.К. Телевидение в системах физической защиты. Учеб. пособие. - СПб., Изд-во СПбГЭТУ "ЛЭТИ", 2001, 135 с.
8. Молебный В.В. Оптико-локационная система. Основы функционального построения. М.: Машиностроение, 1981, 181 с.
9. Шмаков П.В. Стереотелевидение. М.: Связь, 1968, 298 с.
10. Усовершенствованный дальномер. Пат. 1605013, Великобритания. Заявл. 14.03.75 №10842/75, опубл. 16.12.81. МКИ G01S 11/00.
11. Кравец В.Г., Любинский В.Е. Основы управления космическими полетами. М.: Машиностроение, 1983, - 224 с.
12. Патент РФ №2381521. 14.04.2008 г. опубл. 10.02.2010 г. Бюл.4.
13. Сагдуллаев Ю.С, Абдуллаев Д.А., Смирнов А.И. Основы телевизионного контроля процесса сближения космических аппаратов. Изд-во ФАН АН РУз. Ташкент, 1997, 127 с.
Изобретение относится к области прикладного телевидения с использованием регистрации излученного или отраженного лучистого потока от объектов в разных зонах оптического спектра для решения задач контроля и анализа состояния объектов по их телевизионным (ТВ) изображениям. Изобретение может найти применение в системах автоматики, технического зрения, распознавания образов, робототехнике, при решении задач дистанционного контроля и управления движением объектов. Достигаемый технический результат - повышение точности телевизионных измерений относительной скорости движения объектов на больших и средних расстояниях. Указанный результат достигается за счет того, что измерение относительной скорости движения объектов осуществляют на основе двумерных изображений, формируемых с помощью монокулярных черно-белых, цветных, спектрозональных или иных ТВ камер. 3 ил.
Способ измерения относительной скорости движения объектов по их телевизионным изображениям, включающий формирование сигнала телевизионного изображения объекта с известным линейным размером L0 и находящегося на расстоянии ρ1(t)=(L0·F)/x1 от телевизионной камеры с объективом, имеющим фокусное расстояние F, при этом размер оптической проекции наблюдаемого объекта на поверхности преобразователя лучистого потока в телевизионный сигнал равен x1=X·Δt1/Δtp для первого телевизионного изображения объекта, где X - максимальный размер рабочей светочувствительной поверхности преобразователя лучистого потока в телевизионный сигнал, Δtp - временной интервал развертки для рабочей поверхности преобразователя лучистого потока в телевизионный сигнал, характеризующейся числом активных элементов или строк, равных величине Z, а длительность сигнала телевизионного изображения объекта Δt1 равна числу элементов или строк ΔZ1, приходящихся на изображение объекта, определение длительности сигнала изображения объекта Δt1 и его стробирование серией импульсов N1 с периодом следования T0, при этом Δt1=N1·T0, определение первого значения дальности ρ1(t1)=C/N1, где C - постоянная величина, значение которой априорно известно и может быть использовано при вычислении дальности, C=(Lo·F·Δtp)/(X·To), фиксацию полученных данных и определение второго значения дальности ρ2(t), отличающийся тем, что при определении второго значения дальности до объекта задают дополнительное число импульсов ΔNзад., которое зависит от ρ1(t1) и заданной погрешности определения скорости, определяют количество стробирующих импульсов для определения второго значения дальности N2=N1±ΔNзад. и второе значение дальности ρ2 (t1+i)=C/N2, измеряют количество стробирующих импульсов текущего изображения объекта N∗ 2, определяют значение
| САГДУЛЛАЕВ Ю.С | |||
| и др | |||
| Основы телевизионного конгтроля процесса сближения космических аппаратов | |||
| Ташкент, изд-во ФАН АН РУз, 1997, 127 с | |||
| Телевизионное устройство для измерения скорости движения объектов | 1987 |
|
SU1499529A1 |
| ТЕЛЕВИЗИОННАЯ КАМЕРА ДЛЯ НАБЛЮДЕНИЯ В УСЛОВИЯХ ИЗМЕНЯЮЩЕЙСЯ ВО ВСЕМ ПОЛЕ ЗРЕНИЯ ОСВЕЩЕННОСТИ И/ИЛИ ЯРКОСТИ ОБЪЕКТОВ | 2011 |
|
RU2472300C1 |
| СИСТЕМА АНАЛИЗА ТЕЛЕВИЗИОННОГО ИЗОБРАЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1984 |
|
SU1840694A1 |
| US 20060197866 A1, 07.09.2006 | |||
| WO 2001069932 A1, 20.09.2001 | |||
| JP 3117281 A, 20.05.1991 | |||

