Cпособ относится к области управления беспилотными ЛА и может быть применен в системах управления ЛА при преодолении сопротивления с целью совершения оптимального противоперехватного маневра.
Известны способы определения дальностей до подвижных и неподвижных объектов и поверхностей с борта ЛА при помощи импульсных радиолокационных станций (РЛС) и высотомеров.
Проблема преодоления сопротивления ведется по нескольким направлениям [1] . Одно из перспективных - применение активного противоперехватного маневра. Для этого в систему управления ЛА вводят специальную систему преодоления сопротивления, которая работает с зоне сопротивления на основе априорной информации, получаемой от системы обнаружения и сопровождения средств перехвата, установленной непосредственно на борту ЛА. С этой целью на борту ЛА смоделирована инерциальная прямоугольная система координат, в которой размещена антенна бортовой РЛС, работающей в импульсном режиме по определению параметров взаимного движения перехватчика и ЛА.
При совершении управляемого полета по траектории к цели бортовая РЛС в зоне сопротивления работает в режиме приема по обнаружению излучения станции разведки (визирования) цели. При наличии последнего бортовая РЛС переходит на активный поиск перехватчиков. После захвата перехватчика бортовой РЛС бортовое вычислительное устройство ЛА решает уравнения взаимного движения ЛА и перехватчика с целью определения координат возможной точки перехвата. По мере взаимного сближения координаты этой точки постоянно уточняется. При подходе к этой точке ЛА совершает маневр оптимальным образом с целью срыва перехвата. Таким образом, одной из важных задач, решаемых системой преодоления сопротивления, является прогнозирование координат возможной точки перехвата ЛА.
Цель изобретения - осуществление непрерывно уточняемого прогноза координат возможной точки перехвата ЛА доступным методом, легко и просто реализуемым в бортовом вычислительном устройстве ЛА.
Сущность изобретения состоит в получении координат возможной точки перехвата на основе нахождения и непрерывного уточнения аналитической зависимости изменения расстояния между ЛА и перехватчиком от времени и ее решения относительно момента перехвата.
Таким образом, способ определения координат возможной точки перехвата основан на прогнозе и дальнейшем уточнении при взаимном сближении возможного момента времени перехвата и решения уравнений пространственного движения ЛА относительно этого момента времени с целью определения (уточнения) координат искомой точки. Определение (уточнение) момента времени перехвата основано на отыскании аналитической зависимости изменения расстояния при взаимном сближении от времени в виде степенной функции методом аппроксимации и решении полученного уравнения относительно момента встречи. Текущие координаты ЛА при наведении его автономной инерциальной системой управления в любой момент времени можно определить путем решения дифференциальных уравнений его пространственного движения в проекциях на оси земной системы координат [2]:
X3=  VЛАcosθ cosσ dt (1)
VЛАcosθ cosσ dt (1)
Y3=  VЛАsinθ dt (2)
VЛАsinθ dt (2)
Z3=  VЛАcosθ sinσ dt (3) где Х3, Y3, Z3 - координаты ЛА в момент времени t;
VЛАcosθ sinσ dt (3) где Х3, Y3, Z3 - координаты ЛА в момент времени t;
VЛА - скорость ЛА;
θ - угол наклона траектории;
σ - угол пути.
Пусть to - момент начала визирования перехватчика. Тогда уравнения (1), (2), (3) можно представить в виде, позволяющем получить координаты точки встречи:
X VЛАcosθ cosσ dt = X
VЛАcosθ cosσ dt = X VЛА cosθ cosσ dt (4)
VЛА cosθ cosσ dt (4)
Y VЛАsinθ dt = Y
VЛАsinθ dt = Y VЛА sinθ dt (5)
VЛА sinθ dt (5)
Z VЛАcosθ sinσ dt = Z
VЛАcosθ sinσ dt = Z VЛА cosθ sinσ dt (6) где ХВ3, YВ3, ZВ3 - координаты точки встречи;
VЛА cosθ sinσ dt (6) где ХВ3, YВ3, ZВ3 - координаты точки встречи;
Хo3, Yo3, Zo3 - координаты ЛА в момент to, определяемые методом численного интегрирования;
ТВ = tВ - to - промежуток времени от начала визирования до момента встречи.
Представляется первоочередным нахождение значения ТВ, т.е. прогнозирование момента времени встречи и последующее периодическое его уточнение по мере взаимного сближения.
Бортовая РЛС снимает параметры взаимного сближения в сферических координатах:
ρ - радиус-вектор до перехватчика;
εиν - угол места и азимут относительно прямоугольной инерциальной системы координат (фиг.1).
Прямоугольные координаты перехватчика в инерциальной системе координат, выраженные через параметры сферических координат, имеют вид
Xип = ρcosε cosν (7)
Yип = ρsinε (8)
Zип = ρcosε sinν (9)
Смысл перехвата состоит в одновременном выполнении условий











Данные условия одновременно выполняются только при ρ = 0. Значения параметров εиν в этом случае безразличны, так как синус и косинус одного параметра жестко взаимосвязаны. Производят оценку степени влияния учета или неучета изменения параметров εиν на точность прогноза момента времени встречи.
Рассматривают и сравнивают два случая взаимного движения: когда вектор скорости относительного сближения ЛА и перехватчика строго совпадает с линией визирования (ЛВ) и когда вектор скорости относительного сближения ЛА и перехватчика составляет некоторый угол с ЛВ. В первом случае параметры  и
и  равны нулю, следовательно, при прогнозировании необходимо исходить только из анализа изменения параметра ρ . Во втором случае параметры
равны нулю, следовательно, при прогнозировании необходимо исходить только из анализа изменения параметра ρ . Во втором случае параметры  и
и  не равным нулю. Здесь необходимо определить степень их влияния на точность прогноза.
не равным нулю. Здесь необходимо определить степень их влияния на точность прогноза.
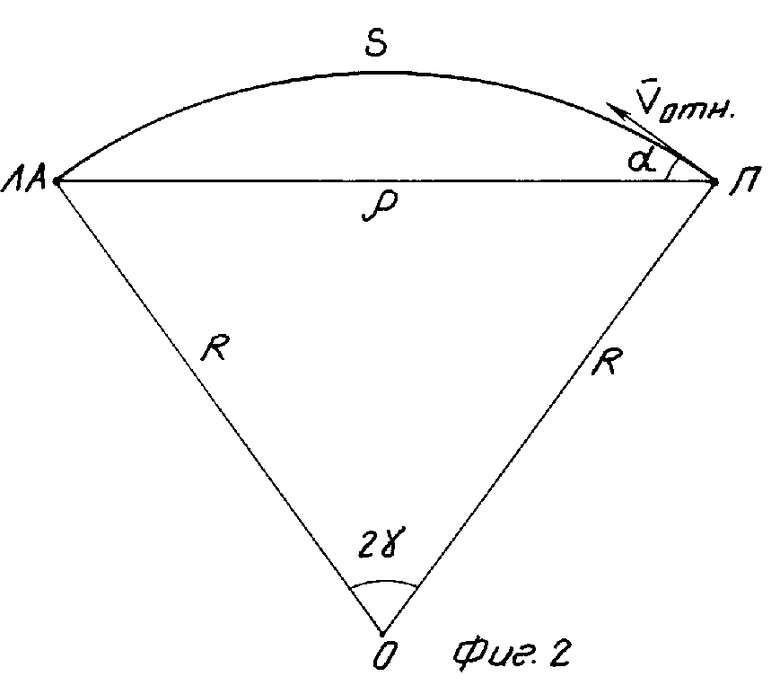
Пусть вектор скорости относительного сближения составляет с ЛВ угол α (фиг.2). При этом для малых значений величин параметр α связан с параметрами εиν соотношением ≃
≃  (13)
(13)
Допускают, что скорость относительного сближения по траектории постоянна. Тогда при постоянном значении поперечной перегрузки траектория относительного сближения близка к дуге окружности радиуса R в пространстве. Длину дуги можно определить из выражения
S = 2R α (14)
Поскольку  = const , то из выражения (14) следует, что
= const , то из выражения (14) следует, что  = const.
= const.
Продифференцировав выражение (14) по α, получают = 2R (15)
= 2R (15)
Параметр ρ представляет собой не что иное, как ЛВ или хорду, и его можно определить как
ρ = 2R sin α (16)
Продифференцировав формулу (16) по α получают = 2Rcosα (17)
= 2Rcosα (17)
В соответствии с выражениями (15) и (17) можно записать = cosα (18)
= cosα (18)
Из выражения (18) следует, что при анализе взаимного движения только по одному параметру ρ возникает погрешность, равная косинусу угла между направлением вектора скорости относительного сближения и линией визирования.
Исходя из тактико-технических характеристик и конструктивных особенностей современных координаторов перехватчиков, имеющих угол захвата не более 14o, можно сделать вывод о том, что неучет параметров  и
и  незначительно сказывается на точности расчетов при определении возможного момента времени перехвата и ими можно пренебречь. Следовательно, для упрощения процесса вычисления Тв предпочтительно воспользоваться одним параметром - изменением ρ во времени.
незначительно сказывается на точности расчетов при определении возможного момента времени перехвата и ими можно пренебречь. Следовательно, для упрощения процесса вычисления Тв предпочтительно воспользоваться одним параметром - изменением ρ во времени.
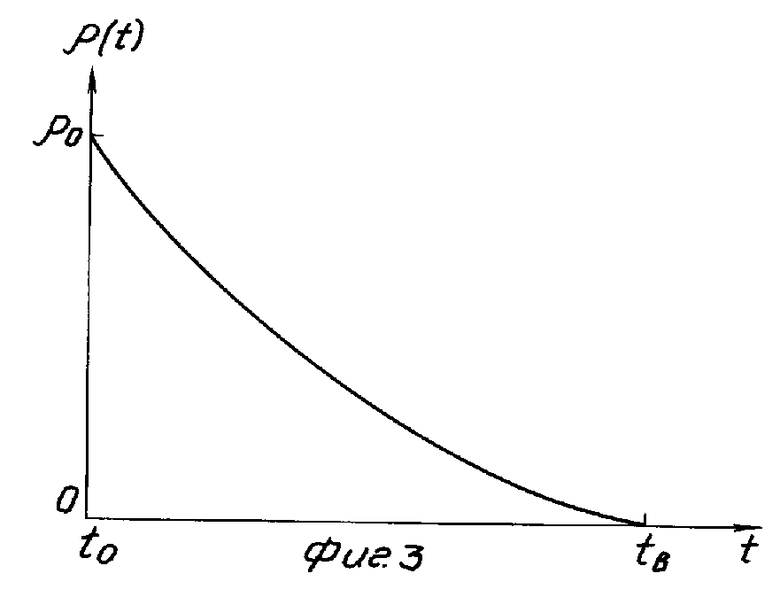
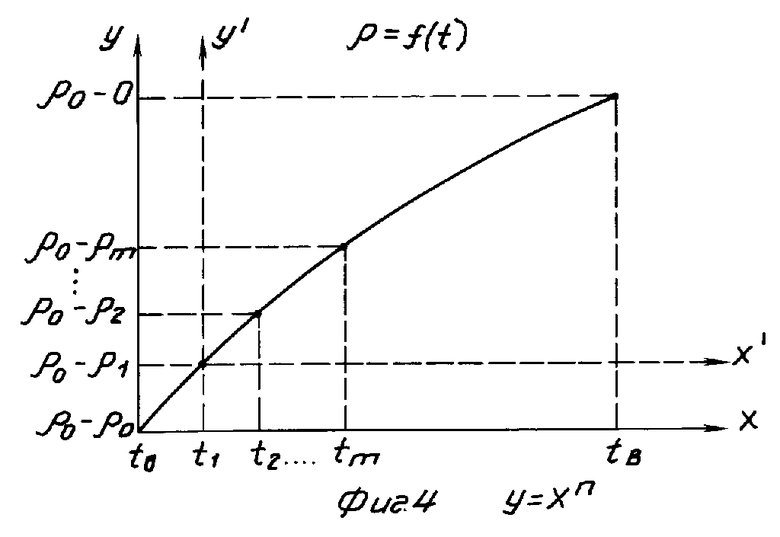
Данная задача решается расчетным путем на основе нахождения аналитической зависимости ρ = f(t) путем аппроксимации по известным мгновенным значениям ρ и решением ее относительно t при значении ρ= 0. Возможный график зависимости ρ = f(t) представлен фиг.3.
Целесообразно данную зависимость искать в относительных единицах в виде
Y = Хn, (19) где Y = ρ oотн - ρ отн (tотн); (20)
Х = tотн - tooтн. (21)
Пусть в дискретные моменты времени
t0, t1, t2,...,tm (22) cнимаются отсчеты
ρo, ρ1, ρ2,...,ρm . (23) Необходимо определить показатель степени n по снятым значениям ρ. Для нахождения n необходимо провести операцию логарифмирования и перейти к относительным единицам.
Пусть интервалы (t1-to) и (ρo-ρ1) - масштабные, тогда
ρотн=  (24)
(24)
tотн=  (25)
(25)
Возможный график зависимости (19) представлен фиг.4. Показатель степени n находится из выражения (19):
n =  (26)
(26)
С учетом выражений (20), (21), (22), (23), (24), (25) формула (26) приобретает вид
 (27)
(27)
Таким образом, получают m-1 значений показателя степени n для последовательного ряда снятых отсчетов параметра ρ.
Дальнейшая задача состоит в том, чтобы получить наиболее достоверное обобщенное значение n. Исходя из того, что чем позднее снят отсчет, тем новее информация о взаимном сближении, отдают приоритет полученной ранжированной последовательности полученных значений n более поздним измерениям. Кроме того, поскольку любая измерительная техническая система имеет свои погрешности снятия отсчетов и с увеличением интервала снятия отсчетов относительные погрешности уменьшаются, более поздние измерения имеют и большую точность. Таким образом, необходим выбор оптимального количества отсчетов и соотношения весов.
Исходя из относительной линейности тенденции возрастания достоверности получаемой информации при последовательном ряде снятия отсчетов, а также близком к линейному увеличению относительной точности измерений, для определения весов полученной последовательности значений n целесообразно воспользоваться формулой Фишборна, дающей линейное соотношение весов:
αi=  (28) где i =
(28) где i =  .
.
Поскольку K = m - 1 и большие веса должны иметь более поздние полученные значения n, то выражение (28) приобретает вид
αi=  (29) где i = (
(29) где i = ( .
.
Необходимости в большом числе проведения измерений в одном цикле нет, так как информация об измерении параметра ρ должна постоянно уточняться.
Наиболее оптимальный можно считать вариант для n = 4 и соответственно K = 3. В этом случае получается оптимальное линейное соотношение весов
α1 = 0,167; α2= 0,333; α3= 0,5.
Тогда усредненное значение n определяется из выражения
n = 0,167 n1 + 0,333 n2 + 0,5 n3 (30)
Из формулы (19) можно записать
x = y (31)
(31)
Подставляя в зависимость (31) выражения (20) и (21), получают
tотн-t (32)
(32)
При ρ = 0 tотн = tвотн. С учетом этого формулa (32) приобретает вид
t (33)
(33)
Подставляя значения относительных величин из формул (24) (25) в (33), получают =
=  (34)
(34)
Поскольку tВ - to = ТВ, то выражение (34) можно записать в окончательном виде
TB=  t1-t
t1-t (35)
(35)
Таким образом, полученные выражения (27), (30), (35) представляют собой расчетные формулы для прогноза значения промежутка времени от начала визирования до момента перехвата.
Подставляя полученное значение ТВ в уравнении (4), (5), (6) и решая их, получают координаты возможной точки перехвата в земной системе координат.
При снятии следующего отсчета ρm+1 в момент tm+1 происходит перераспределение исходных данных в соответствии с выражениями
t'o = t1, t'1 = t2,...,t'm = tm+1;
ρo`=ρ1, ρ1`=ρ2, ...,ρm`=ρm+1
После этого цикл вычисления повторяется, т.е. определяется значение Т'В. Графически происходит как бы перенос начала координат аппроксимирующей функции в точку, соответствующую значению ρo-ρ1(фиг.4). Затем по уточненным данным прогнозного момента встречи уточняются координаты возможной точки перехвата по выражениям
X VЛАcosθ cosσ dt
VЛАcosθ cosσ dt
Y VЛАsinθ dt
VЛАsinθ dt
Z VЛАcosθ sinσ dt где значения X
VЛАcosθ sinσ dt где значения X
Таким образом, с каждым тактом работы бортовой РЛС и получением новой информации о параметрах взаимного сближения ЛА и перехватчика происходит уточнение момента времени встречи и координат возможной точки перехвата, при этом информация постоянно накапливается и обновляется.
Данный способ прост, доступен, динамичен, относительно точен, его легко реализовать программно в бортовом вычислительном устройстве. При утере части информации, что имеет место в реальных условиях работы при воздействии помех, данный способ полностью работоспособен, так как в нем используется ранее накопленная информация, и, кроме того, является независимым от моментов поступления этой информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ГИПЕРЗВУКОВЫЕ ЦЕЛИ | 2009 |
|
RU2408847C1 |
| СПОСОБ ПЕРЕХВАТА ПРИОРИТЕТНОЙ ЦЕЛИ, ОБЕСПЕЧИВАЮЩИЙ СРЫВ НАВЕДЕНИЯ ИСТРЕБИТЕЛЕЙ СОПРОВОЖДЕНИЯ | 2020 |
|
RU2742737C1 |
| Способ управления группой беспилотных летательных аппаратов с учетом степени опасности окружающих объектов | 2019 |
|
RU2728197C1 |
| СПОСОБ НАВЕДЕНИЯ НА ВЫСОКОСКОРОСТНЫЕ ВЫСОКОМАНЕВРЕННЫЕ ВОЗДУШНЫЕ ОБЪЕКТЫ | 2020 |
|
RU2751378C1 |
| СПОСОБ ПРЕДСТАРТОВОЙ ВЫСТАВКИ ВЫСОКОТОЧНЫХ РАКЕТ | 1995 |
|
RU2150124C1 |
| Способ наведения летательного аппарата на наземные цели с помощью радиолокатора с синтезированием апертуры антенны | 2023 |
|
RU2824690C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ НАИБОЛЕЕ БЛАГОПРИЯТНЫХ ДЛЯ АТАКИ ВОЗДУШНЫХ ЦЕЛЕЙ В РЕЖИМЕ МНОГОЦЕЛЕВОГО СОПРОВОЖДЕНИЯ | 2020 |
|
RU2743479C1 |
| Способ оптимальной адаптации маршрута перехвата воздушной цели при нахождении в районе полетов группировки зенитных ракетных комплексов | 2020 |
|
RU2734171C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2586399C2 |

Использование: при управлении беспилотными летательными аппаратами (ЛА), в системах управления ЛА при преодолении сопротивления с целью совершения оптимального противоперехватного маневра. Сущность изобретения заключается в нахождении и непрерывном уточнении аналитической зависимости изменения расстояния между ЛА и перехватчиком при их взаимном сближении от времени, определении из нее возможного момента перехвата и решении уравнений пространственного движения ЛА относительно этого момента времени с целью определения координат возможной точки перехвата. 4 ил.
СПОСОБ ПРОГНОЗИРОВАНИЯ КООРДИНАТ ВОЗМОЖНОЙ ТОЧКИ ПЕРЕХВАТА ЛЕТАТЕЛЬНОГО АППАРАТА, заключающийся в определении изменения расстояния между летательным аппаратом и перехватчиком в виде временной зависимости с последующим вычислением момента времени и координат возможной точки перехвата летательного аппарата, отличающийся тем, что на летательном аппарате в моменты времени t0, t1, ... , ti, ..., tm с помощью импульсной радиолокационной станции определяют мгновенные значения радиус-вектора расстояния между летательным аппаратом и перехватчиком ρ0,ρ1,...,ρi,...,ρm, вычисляют возможный момент времени перехвата Tп по формуле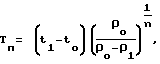
где n - обобщенное на основе оценок Фишборна значение показателей ni, определяемых по формуле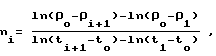
i = 1,..., m-1,
где n1 < n2 < ... < ni < ... < nm-1,
вычисляют координаты x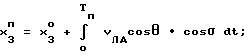
где vЛА - скорость летательного аппарата;
θ - угол наклона траектории;
s - угол пути;
x
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кузнецов А.А | |||
| Оптимизация параметров баллистических ракет по эффективности | |||
| М.: Машиностроение, 1986, 42-47 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дмитриевский А.А., Лысенко Л.Н., Богодистов С.С | |||
| Внешняя баллистика | |||
| М | |||
| Машиностроение, 1991, с 117 | |||
