Система анализа телевизионного изображения подвижных объектов относится к телевизионной технике и может быть использована для анализа изображений подвижных объектов, в частности для определения расстояния между объектами и скорости их относительного продольного движения.
Известно устройство [1], в котором оптическое изображение объекта преобразуется в телекамере в полный телевизионный сигнал и через линию связи поступает в блок селекции, в котором выделяется информация о наблюдаемом объекте и формируется импульс, длительность которого соответствует угловому размеру объекта. Сформированный импульс поступает на блок стробирования, на второй вход которого поступают импульсы с измерительного генератора, импульсы которого "заполняют" импульс, выделенный в блоке селекции. Таким образом, осуществляется преобразование временного интервала в цифровую форму. В вычислительном блоке подсчитывается количество импульсов и определяется размер объекта. В блок управления из вычислительного блока поступает информация о размере объекта и вырабатывается сигнал, поступающий в блок поиска. При помощи рамки, формируемой блоком поиска, осуществляется поиск и "захват" другого объекта наблюдения. Видеоконтрольное устройство служит для контроля процесса "захвата" объекта и его селекции на сложном фоне.
При воздействии помех на линии связи и при срывах изображения, например при передаче телевизионного изображения из космоса в моменты перехода с одного наземного измерительного комплекса на другой, может происходить потеря объекта или превышение размеров объекта размера рамки, формируемой блоком поиска. После окончания действия помехи необходим последующий "захват" объекта. На этот процесс тратится значительное время.
На фиг.1 представлена блок-схема системы анализа телевизионного изображения подвижных объектов.
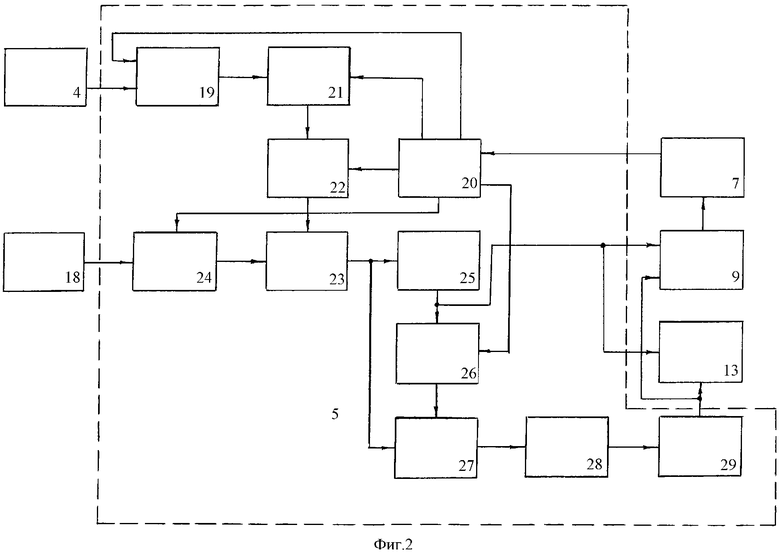
На фиг.2 представлена структурная схема блока определения параметров относительного движения.
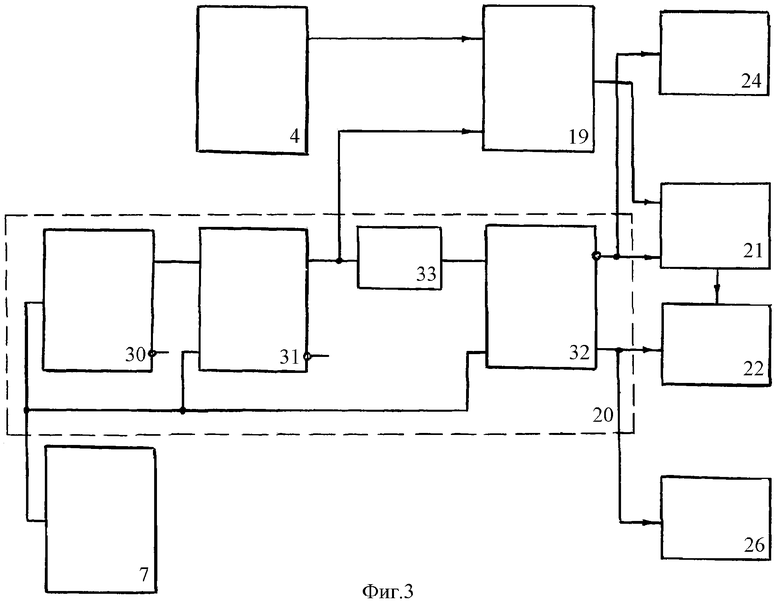
На фиг.3 представлена структурная схема блока управления.
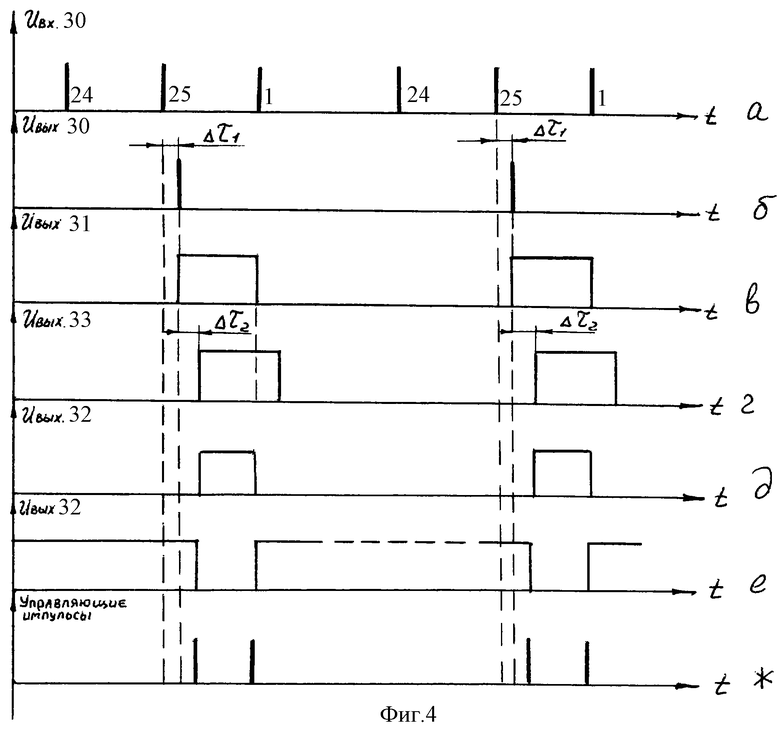
На фиг.4 представлены временные диаграммы напряжений работы блока управления.
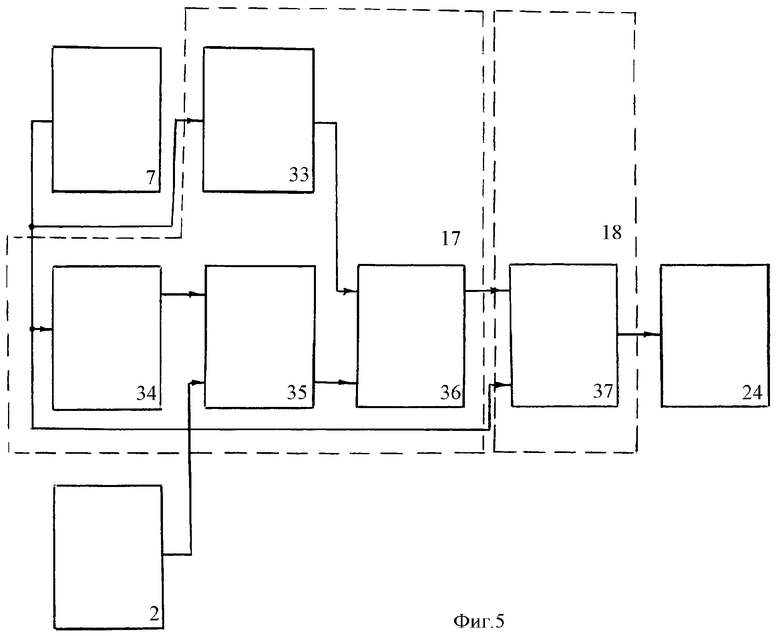
На фиг.5 представлены структурные схемы блока определения режимов работы телекамеры и блока формирования переключающего импульса.
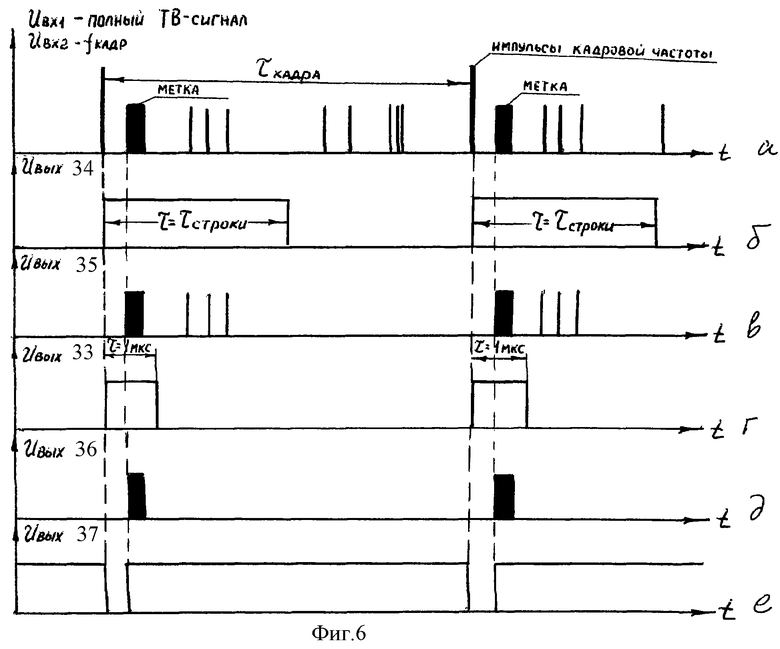
На фиг.6 представлены временные диаграммы напряжений работы блоков определения режимов работы телекамеры и блока формирования переключающего импульса.
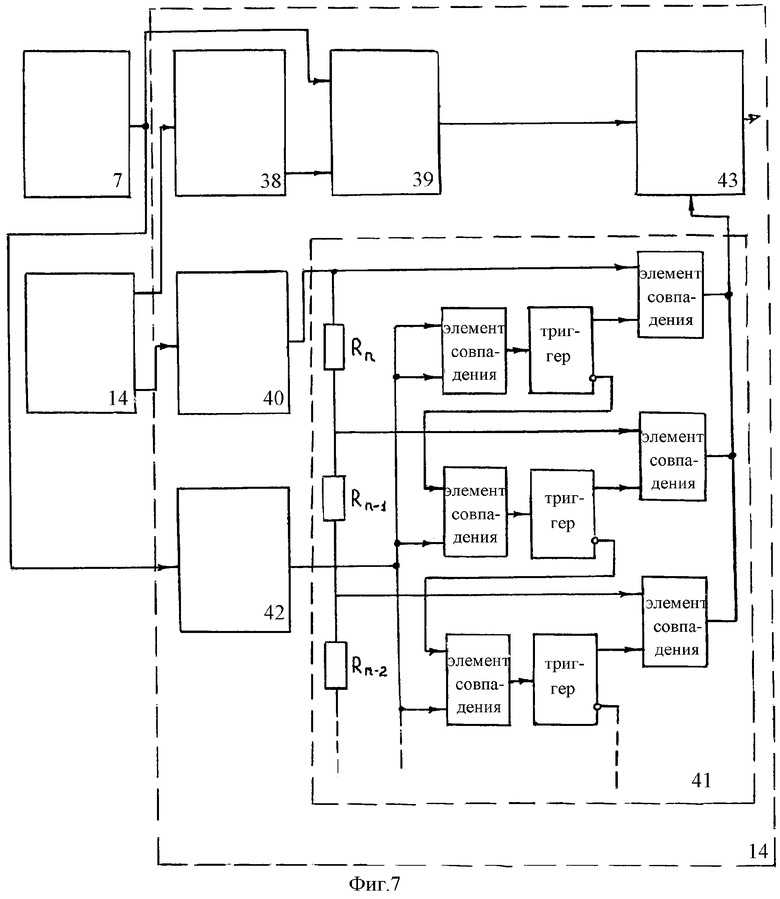
На фиг.7 представлена структурная схема блока автоматического управления.
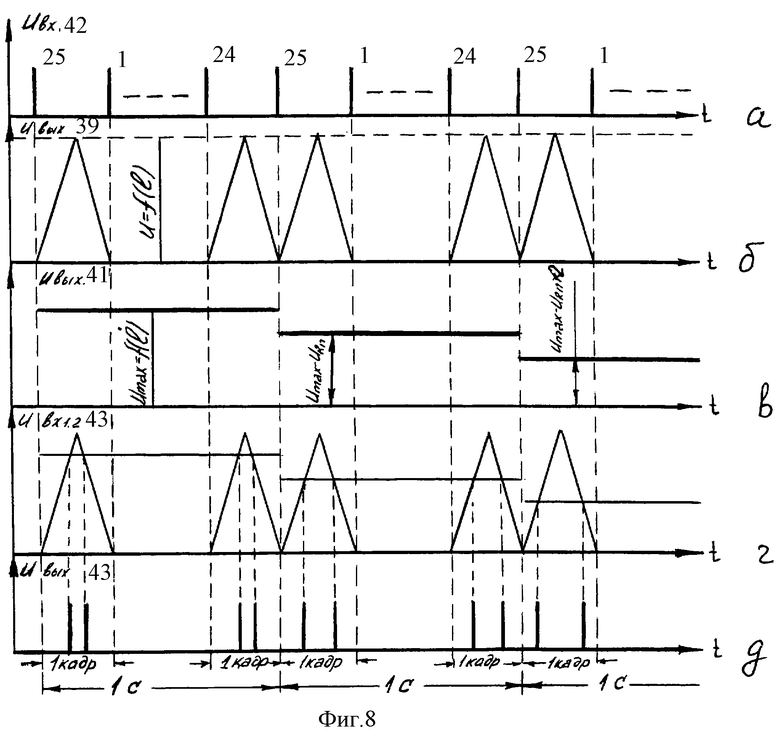
На фиг.8 представлены временные диаграммы напряжений работы блока автоматического управления.
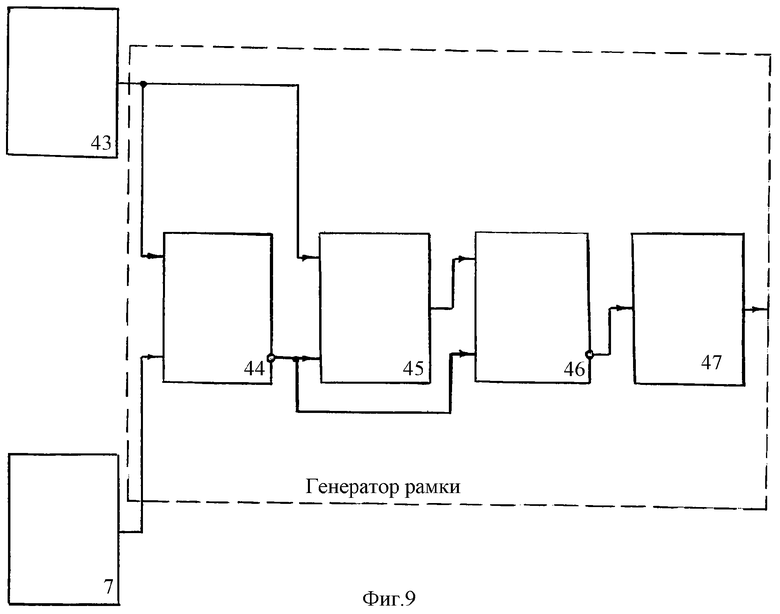
На фиг.9 представлена часть схемы генератора рамки.
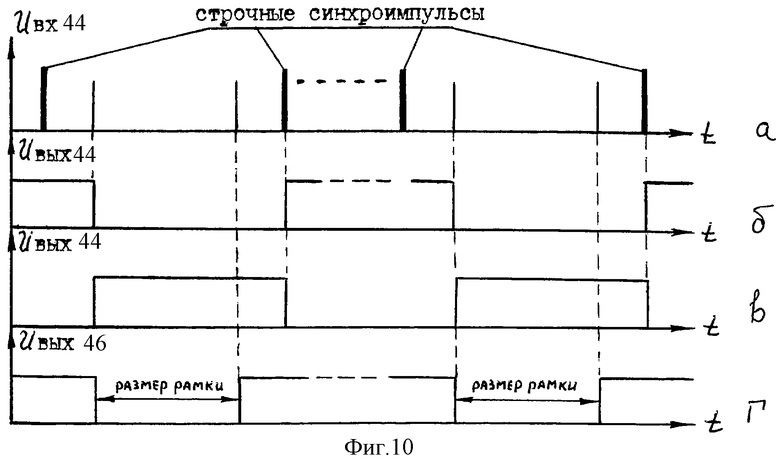
На фиг.10 представлены временные диаграммы напряжений работы генератора рамки.
В качестве примера конкретного выполнения рассматривается система анализа телевизионного изображения подвижных объектов, которая позволяет определить расстояние между объектами и скорость их относительного движения. Телевизионный метод измерения расстояния между объектами основан на зависимости между размером объекта на мишени телевизионной трубки передающей камеры и временными интервалами развертки.
На мишень передающей трубки размером ам1×ам2 телевизионной камеры через объектив с фокусным расстоянием F проецируется объект размером ао, который находится на расстоянии l от плоскости объектива телекамеры. С помощью специального блока выделяется видеосигнал объекта и формируется прямоугольный импульс длительностью tн, соответствующий размеру объекта ао. Затем этот сигнал стробируется импульсной последовательностью с периодом следования τ. Количество импульсов N на выходе схемы стробирования пропорционально длительности tн. Расстояние l до объекта определяется соотношением

где tр - время развертки электронного луча передающей камеры на мишени размером ам.
Величины ао, tр, F, ам, τ - известны и постоянны, поэтому алгоритм измерения l сводится к проведению операции деления постоянного числа  на число N.
на число N.
Относительная погрешность измерения зависит от периода следования стробирующих импульсов и определяется соотношением:
Для измерения относительной скорости сближения или удаления объекта производится операция
где li и li+1 - расстояние между объектами, измеренное через интервал времени Δt=1/к (c).
На фиг.1 представлена блок-схема системы анализа телевизионного изображения подвижных объектов.
Система анализа телевизионного изображения подвижных объектов содержит телекамеру 1, линию связи 2, блок селекции 3, блок стробирования 4, блок определения параметров относительного движения 5, блок поиска 6, видеоконтрольный блок 7, измерительный генератор 8, блок формирования телевизионного сигнала 9, элемент задержки 10, блок распознавания помех 11, блок формирования сигнала о помехе 12, блок памяти 13, блок автоматического управления блоком 14, коммутатор 15, блок формирования порогового напряжения 16, блок определения режимов работы телекамеры 17, блок формирования переключающего импульса 18.
Система анализа телевизионного изображения подвижных объектов работает следующим образом.
Оптическое изображение объекта, посредством телекамеры 1, преобразуется в телевизионный сигнал, который через линию связи 2 поступает в блок селекции 3. На второй вход блока селекции 3 поступает сигнал с блока поиска 6. При помощи этих блоков решается задача селекции объекта на сложном фоне. В решении этой задачи могут быть выделены два процесса: процесс "захвата" объекта и процесс обрамления и стробирования. Процесс "захвата" объекта осуществляется оператором, который вручную регулирует размер рамки и добивается полного обрамления изображения объекта. В блоке селекции 3 выделяются импульсы об объекте. Размером рамки управляет оператор. С выхода блока селекции 3 смешанный сигнал, состоящий из сигнала о рамке и сигнала об объекте, поступает на информационный вход видеоконтрольного блока 7, где и контролируется процесс "захвата" и обрамления объекта. Таким образом выделяется объект на сложном фоне и формируется импульс длительностью tн, соответствующий угловому размеру объекта. После ручного "захвата" и обрамления начинается процесс автоматического слежения за объектом. Выделенный в блоке селекции 3 видеоимпульс об объекте через коммутатор 15 поступает на второй вход блока поиска 6, в котором передний и задний фронты импульса формируют рамку, изменяя ее размер автоматически, в соответствии с изменением размера объекта. Импульс, несущий информацию об объекте и поступающий из блока селекции 3, стробируется импульсами измерительного генератора 8 в блоке стробирования 4, и временной интервал tн преобразуется в цифровую форму. Серия N импульсов, заполнивших интервал tн, с выхода блока стробирования поступает в блок определения параметров относительного движения 5.
Структурная схема блока определения параметров относительного движения 5 представлена на фиг.2. В состав блока определения параметров относительного движения 5 входят элемент совпадения 19, блок управления 20, первый счетчик 21, первый блок переноса 22, счетчик с переменным коэффициентом деления 23, генератор числа А 24, второй счетчик 26, второй блок переноса 26, счетчик вычитания 27, переключатель 28, блок умножения 29. Поступившие в блок 5 определения параметров относительного движения N импульсов через элемент совпадения 19 подаются по командам из блока управления 20 в первый счетчик 21.
Блок-схема блока управления 20 представлена на фиг.4. Работа блока будет рассмотрена ниже. После ввода в первый счетчик 21 N импульсов блок управления 20 дает команду на перенос числа N из первого счетчика 21 в счетчик с переменным коэффициентом деления 23. Так устанавливается его коэффициент деления, равный N. Перенос числа N в счетчик 23 осуществляется через первый блок переноса 22. После установки коэффициента деления счетчика 23 с переменным коэффициентом деления блок 20 управления формирует команду, поступающую в генератор 24 числа А. Генератор 24 числа А формирует А импульсов, которые подаются на вход счетчика с переменным коэффициентом деления 23, где производится операция деления числа А на N. Импульсы с выхода счетчика с переменным коэффициентом деления 23, количество которых равно расстоянию l, подаются на второй счетчик 25.
В блоке формирования телевизионного сигнала 9 осуществляется преобразование цифровой информации, поступающей со второго счетчика 25, в телевизионный сигнал, который поступает на видеоконтрольный блок 7, где и происходит отображение текущей информации о расстоянии между объектами.
Измерение относительной скорости сближения или удаления производится в счетчике вычитания 27. После i-го измерения расстояния, по команде из блока управления 20, информация о расстоянии li со второго счетчика 25 переносится в счетчик вычитания 27. Перенос числа li осуществляется через второй блок переноса 26. Во время i+1-го измерения на вход счетчика вычитания 27 поступает число li+1 в виде количества импульсов, и в счетчике вычитания 27 происходит операция вычитания li-li+1=Δl. При сближении объектов li>li+1 и после операции вычитания с прямых выходов триггеров счетчика вычитания 27 (выход 1) снимается число Δl, при удалении объектов li<li+1 и после операции вычитания на прямых выходах триггеров счетчика вычитания 27 будет записано число lобщ-Δl (lобщ - емкость счетчика вычитания 27), а на инверсных выходах триггеров (выход 2) будет записано число Δl. В блоке умножения 29 производится операция умножения числа Δl на число К. При сближении объектов переключатель 28 устанавливается в положение 1, при удалении объектов - в положение 2. Цифровая информация о скорости с блока умножения 29 поступает в блок формирования телевизионного сигнала 9, где преобразуется в полный телевизионный сигнал и подается на видеоконтрольный блок 7, где наряду с текущим значением расстояния между объектами отображается и скорость их относительного движения.
Блок управления 20, блок-схема которого приведена на фиг.3, а временные диаграммы напряжений представлены на фиг.4, функционирует следующим образом. На вход блока управления 20 поступают с видеоконтрольного блока 7 импульсы с частотой f кадровая. На выходе делителя 30 по приходу на его вход каждого 24 импульса кадровой частоты формируется импульс. Делитель 30 собран как схема с последовательным переносом. Поэтому задержка на формирование импульса на выходе делителя 30 Δτ1 будет достаточной для затухания переходных процессов в первом триггере 31, который каждым кадровым импульсом устанавливается в нулевое состояние по прямому выходу. Импульс с выхода делителя 30 устанавливает первый триггер 31 в состояние "1" по прямому выходу. Таким образом, на выходе первого триггера 31 получается импульс длительностью в один кадр, передний фронт которого формируется импульсом с делителя 30, а задний фронт - кадровым импульсом, см. диаграммы а, б на фиг.4. С прямого выхода первого триггера 31 импульс поступает на элемент совпадения 19, на второй вход которого поступает сигнал с блока стробирования 4. На выход элемента совпадения 19 проходит сигнал с блока стробирования в течение одного кадра и поступает на счетчик 21. Импульсы кадровой частоты fкадр поступают также на вход "Установка 0" второго триггера 32 и устанавливают его в нулевое состояние по прямому выходу. На вход "Установка 1" второго триггера 32 через элемент задержки 33 (см. диаграмму 4г) поступает импульс с прямого выхода первого триггера 31, и своим положительным фронтом устанавливает второй триггер 32 в состояние 1 по прямому выходу (см. диаграмму 4д). Следующий кадровый импульс (см. диаграмму 4д и 4е фиг.4) "переворачивает" второй триггер в состояние "0" по прямому выходу и в состояние "1" по инверсному. Импульс с прямого выхода второго триггера 32 поступает на первый 22 и второй 26 блоки переноса. По приходу этого импульса осуществляется перенос информации со счетчиков 21 и 25 в блоки 22 и 26 переноса. Импульс с инверсного выхода второго триггера 32 поступает в первый счетчик 21 и в генератор 24 числа А, запуская своим положительным фронтом генератор 24 числа А и обнуляя первый счетчик 21. Задержка Δτ2 элемента задержки 33 должна быть достаточной для завершения процесса счета в первом счетчике 21.
Генератор 24 числа А может быть реализован с использованием пересчетной схемы, в которой по приходу каждого импульса из блока управления 20 формируется заданное число А и поступает в счетчик с переменным коэффициентом деления. Устройство блока селекции, блока поиска, схемы стробирования, измерительного генератора аналогично блокам устройства (1). Устройство блока формирования телевизионной информации аналогично устройству блока формирования информации.
Режим работы генератора 24 числа А зависит от режима работы телекамеры. При смене объективов телекамеры соответственно меняется и фокусное расстояние F. Поэтому смена объективов должна менять режим работы генератора числа А. Смена объективов контролируется по появлению белой метки в верхнем левом углу растра. Импульс переключения генератора числа А на другой режим работы формируется в блоке формирования переключающего импульса 18 по сигналам из блока определения режимов работа телекамеры 17. Блок-схемы этих двух блоков представлены на фиг.5.
В состав блока определения режимов работы телекамеры 17 входят; блок 33 формирования импульса τ=1 мкс, блок 34 формирования импульса τ=τстроки, элемент совпадения 35, блок выделения метки 36. Блок формирования переключающего импульса 18 представляет собой триггер 37.
Импульсы кадровой частоты поступают из видеоконтрольного блока 7 на вход блока 33 формирования импульса длительностью τ1=1 мкс, на вход 34 блока формирования импульса длительностью τ2=τстроки и на вход "Установка 0" триггера 37. Работа перечисленных блоков поясняется временными диаграммами напряжений, приведенных на фиг.6. Сформированный в блоке 34 формирования импульса длительностью τ=τстроки импульс поступает на элемент совпадения 35, на второй вход которого подается полный телевизионный сигнал из линии связи 2. На вход элемента совпадения 35 проходит только первая строка. Этот сигнал поступает на вход блока выделения метки 36. На второй вход блока выделения метки 36 приходит импульс длительностью 1 мкс, сформированный в блоке 33 формирования импульса длительностью τ1=1 мкс. На выход блока 36 выделения метки проходит только импульс, соответствующий метке. Если метки нет, то на входе "Установка 1" и на прямом выходе триггера 37 нулевой потенциал. Если метка появилась, то положительный перепад импульса о метке переключает триггер 37 в состояние "1" на прямом выходе. Следующий кадровый импульс устанавливает триггер 37 в нулевое состояние на прямом выходе. Сформированный таким образом импульс проходит в блок 5 определения параметров относительного движения на генератор 24 числа А. При отсутствии метки на входе генератор 24 числа А работает в одном режиме, формируя на выходе число А. При появлении метки на входе генератора 24 числа А устанавливается единичный потенциал и генератор переходит в другой режим, формируя на выходе число А1.
Кроме генератора 24 числа А, импульсы из блока 18 формирования переключающего импульса поступают в блок поиска 6. По приходу этого импульса в блоке 6 поиска происходит изменение размеров рамки в соответствующее число раз.
Блоки формирования импульса τ1=1 мкс и τ2=τстроки представляют собой ждущие мультивибраторы, блок выделения метки реализован аналогично схеме совпадения.
При воздействии помех на линии связи 2 наблюдается искажение телевизионного изображения, а при переходе с одного наземного измерительного комплекса на другой (которые используются в качестве ретрансляционных станций при передаче телевизионного изображения из космоса) возможны срывы изображения. В этом случае, после восстановления телевизионного изображения, необходимо вновь производить ручной "захват" объекта и его обрамления. Это резко снижает оперативность определения расстояния между объектами и относительной скорости. Но если во время действия помехи изменять размер рамки в соответствии с последним значением скорости, которое было получено до появления помехи, то после восстановления изображения время перехода в автоматическое слежение при медленно изменяющейся скорости (что является реальным для многих классов движущихся объектов) сводится к минимальной величине.
Для повышения оперативности определения расстояния между объектами и скорости их относительного движения введен блок распознавания помех 11, на вход которого поступает текущий телевизионный сигнал с линии связи 2 и сигнал, прошедший через элемент задержки 10 и задержанный на время Δt. Блок распознавания помех 11 представляет собой коррелятор. В этом блоке производится вычисление корреляционной функции между текущим и задержанным телевизионными сигналами. Напряжение, соответствующее корреляционной функции, поступает в блок формирования сигнала о помехе 12, который представляет собой пороговое устройство, на второй вход которого поступает сигнал от блока формирования порогового напряжения 16. При появлении помехи значение корреляционной функции изменяется, так как по спектральным характеристикам сигнал о помехе резко отличается от телевизионного сигнала. В случае, когда напряжение, соответствующее корреляционной функции, превысит значение порогового напряжения, на выходе блока формирования сигнала о помехе 12 появляется импульс, длительность которого равна времени действия помехи. Импульс из блока формирования сигнала о помехе 12 поступает на первый информационный вход блока памяти 13 и на второй информационный вход коммутатора 15, который подключает к блоку поиска 6 блок автоматического управления 14. Во время действия импульса на блок памяти 13 запомненные в нем последние значения расстояния и скорости, вычисленные до появления помех, поступают в блок автоматического управления 14, где в зависимости от напряжения, соответствующего значениям расстояния и скорости, вырабатывается серия импульсов, которые управляют блоком поиска 6 и увеличивают размер рамки пропорционально скорости в течение всего времени действия помехи. По окончании действия помех величина напряжения, соответствующая корреляционной функции, становится меньше порогового напряжения, и на выходе блока формирования сигнала о помехе формируется задний фронт импульса. Действие импульса на блок памяти 13 и на схему переключения заканчивается, и система переходит в обычный режим работы. Если во время действия помехи происходит переключение объективов и блок определения режимов работы телекамеры может распознать белую метку на фоне помех, то формируется переключающий импульс, поступающий в блок поиска и блок определения параметров относительного движения, изменяющий режим работы генератора числа А и изменяющий размер рамки. В противном случае, когда метку распознать не удается, схема сработает сразу по прекращению действия помех.
Блок-схема блока 14 автоматического управления приведена на фиг.7. Временные диаграммы напряжений, поясняющие работу схемы, представлены на фиг.8. На блок-схеме показан участок схемы автоматического управления блоком поиска. Схема работает следующим образом. На второй и третий информационные входы блока памяти 13 поступает информация из блока определения параметров относительного движения 5. При появлении помехи из блока формирования сигнала о помехе 12 в блок памяти 13 поступает сигнал, по которому информация о расстоянии между объектами и скорости их относительного движения переносится в блок автоматического управления 14. Цифровой сигнал о расстоянии через первый цифроаналоговый преобразователь 38 поступает в блок 39 формирования напряжения треугольной формы, в котором устанавливает амплитуду треугольного напряжения, пропорциональную расстоянию. Блок 39 формирования напряжения треугольной формы запускается импульсами кадровой частоты, поступающими с видеоконтрольного блока 7. Цифровой сигнал, пропорциональный скорости относительного движения, через второй цифроаналоговый преобразователь 40 поступает в блок формирования напряжения ступенчатой формы 41, на второй вход которого с делителя 42 поступают импульсы с частотой fкадр/25, обеспечивающие изменение напряжения на выходе схемы на один дискрет один раз в секунду. Первый, с момента начала действия помехи, импульс fкадр/25 коммутирует схему блока формирования напряжения ступенчатой формы таким образом, что на блок формирования импульсов запуска 43 поступает все напряжение Umax, соответствующее скорости относительного движения (см. фиг.8а,б). На второй вход блока формирования импульсов запуска 43 поступает напряжение треугольной формы, изменяющееся в промежутке между двумя кадровыми импульсами fкадр от 0 вначале до Umax в середине и до 0 в конце временного интервала между двумя кадровыми импульсами fкадр (см. фиг.8в). В момент равенства напряжений на первом и втором входах блока формирования импульса запуска 43 на его выходе формируется импульс, поступающий на второй вход блока поиска 6 и запускающий генератор рамки (см. фиг.8г). Блок формирования напряжения ступенчатой формы 41 включает сопротивления элемента совпадения и триггеры. По приходу в блок формирования напряжения ступенчатой формы 41 второго импульса fкадр/25 из всей цепочки исключается одно сопротивление и напряжение, поступающее в блок формирования импульсов запуска 43 поступает напряжение
где n - количество сопротивлений в линейке делителя. Количество сопротивлений n выбирается в зависимости от времени действия помехи, которое необходимо оценить заранее на основании статистических исследований. Если каждое следующее сопротивление подключать через 1 с (т.к. переключение осуществляется импульсом fкадр/25), тогда  , т.е. количество сопротивления прямо пропорционально длительности помехи.
, т.е. количество сопротивления прямо пропорционально длительности помехи.
Работа блока автоматического управления 14 в последующие моменты времени аналогична. По прекращению действия помех коммутатор 15 подключает к управлению блоком поиска 6 блок селекции 3, но теперь ручной "захват" не требуется, так как объект после восстановления изображения оказывается полностью обрамленным.
Описание коррелятора приведено в [1].
Блок формирования импульсов запуска 43 может быть реализован на базе триггера, напряжением запирания которого является напряжение, поступающее из блока формирования напряжения ступенчатой формы 41. Срабатывание триггера происходит при равенстве напряжения запирания и напряжения треугольной формы.
Генератор рамки, входящий в состав блока поиска 6, может быть реализован аналогично прототипу, но может быть использована и другая схема реализации, представленная на фиг.9. На фиг.9 представлена часть схемы генератора рамки, которая формирует рамку по строке. Устройство генератора рамки, формирующего рамку по кадру, аналогично. Временные диаграммы напряжений, поясняющие работу генератора рамки, представлены на фиг.10. Схема работает следующим образом. Строчные синхроимпульсы поступают на вход "Установка 1" первого триггера 44. По приходу первого импульса на выходе первого триггера 44 устанавливается положительный потенциал. На второй вход первого триггера 44 поступают импульсы из блока формирования импульсов запуска 43 или из блока селекции 3, устанавливающие этот триггер в состояние "0" по прямому выходу. Сигнал с выхода первого триггера 44 поступает на вход схемы И 45 и на вход "Установка 1" второго триггера 46 и своим положительным перепадом  устанавливает второй триггер 46 в состояние 1. При этом на входе схемы И 45 устанавливается положительный потенциал. Поэтому, когда на второй вход схемы И поступает импульс из блока формирования импульса запуска 43 или из блока селекции 3, то он проходит через схему И и устанавливает триггер в состояние "0" по прямому выходу. На выходе второго триггера 46 формируется импульс, длительность которого определяет размер рамки. Сформированный импульс поступает на усилитель 47, где его амплитуда увеличивается до амплитуды стандартного телевизионного сигнала, т.е. уровня "белого" и "черного".
устанавливает второй триггер 46 в состояние 1. При этом на входе схемы И 45 устанавливается положительный потенциал. Поэтому, когда на второй вход схемы И поступает импульс из блока формирования импульса запуска 43 или из блока селекции 3, то он проходит через схему И и устанавливает триггер в состояние "0" по прямому выходу. На выходе второго триггера 46 формируется импульс, длительность которого определяет размер рамки. Сформированный импульс поступает на усилитель 47, где его амплитуда увеличивается до амплитуды стандартного телевизионного сигнала, т.е. уровня "белого" и "черного".
Таким образом, на выходе усилителя 47 формируется сигнал рамки. Работа канала формирования размера рамки по кадру аналогична.
Введение новых блоков позволяет использовать предлагаемую систему анализа телевизионного изображения подвижных объектов при воздействии помех на канал связи.
При передаче телевизионного изображения из космоса наземные измерительные пункты (НИПы) используются в качестве ретрансляторов телевизионного сигнала. В процессе одного телевизионного сеанса связи, длительность которого 10-15 минут, задействуются обычно 3-4 НИПа, следовательно, за один телевизионный сеанс связи происходит 2-3 переключения с НИПа на НИП. В момент переключения полностью пропадает изображение на экране. Кроме этого на канал связи воздействуют атмосферные и другие виды помех, которые приводят к искажению и далее срывам изображения.
При использовании системы анализа телевизионного изображения подвижных объектов повторный "захват" объекта и его обрамление не требуются, так как во время действия помехи система прогнозирует движение объекта и его угловой размер. При этом размер рамки изменяется пропорционально прогнозируемому угловому размеру объекта. При восстановлении изображения после воздействия помех объект оказывается полностью обрамленным, т.е. оператору не приходится осуществлять процесс "захвата" и обрамления объекта. Это резко снижает нагрузку на оператора и уменьшает время, необходимое на "захват" и обрамление объекта при восстановлении изображения после действия помех, до минимальной величины.
Источники информации
1. Павлов Б.В. Кибернетические методы технического диапазона. М., Машиностроение, 1966.
2. М.Н. Либенсон и др. Автоматизация распознавания телевизионных изображений. М., Энергия, 1975, с.50-74 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионное устройство для контроля объектов | 1980 |
|
SU919164A1 |
| СИСТЕМА ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006942C1 |
| Система ввода телевизионных изображений в ЭВМ | 1989 |
|
SU1665391A1 |
| Телевизионный площадемер | 1979 |
|
SU873463A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Устройство для определения размеров изображения объекта | 1986 |
|
SU1381732A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 1990 |
|
RU2006941C1 |
| УСТРОЙСТВО ОДНОКРАТНОГО ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ | 1999 |
|
RU2205521C2 |
| ТЕЛЕВИЗИОННАЯ СИСТЕМА ДЛЯ КОМПЬЮТЕРНОЙ РЕГИСТРАЦИИ СИГНАЛА ИЗОБРАЖЕНИЯ ИНТЕРФЕРОГРАММ | 2012 |
|
RU2489806C1 |
| Устройство для дистанционного управления работой горной машины непрерывного действия | 1988 |
|
SU1613605A1 |
Изобретение относится к области электротехники и предназначено для использования в телевизионной технике. Техническим результатом является повышение оперативности анализа телевизионного изображения подвижных объектов. Система анализа содержит телекамеру, линию связи, блок селекции, блок стробирования, блок определения параметров относительного движения, блок поиска, видеоконтрольный блок, измерительный генератор, блок формирования телевизионного сигнала, элемент задержки, блок распознавания помех, блок формирования сигнала о помехе, блок памяти, блок автоматического управления, коммутатор, блок формирования порогового напряжения, блок определения режимов работы телекамеры, блок формирования переключающего импульса. В состав блока определения параметров относительного движения входят элемент совпадения, блок управления, первый и второй счетчики, счетчик с переменным коэффициентом деления, генератор числа А, два блока переноса, счетчик вычитания, переключатель и блок умножения. 11 ил.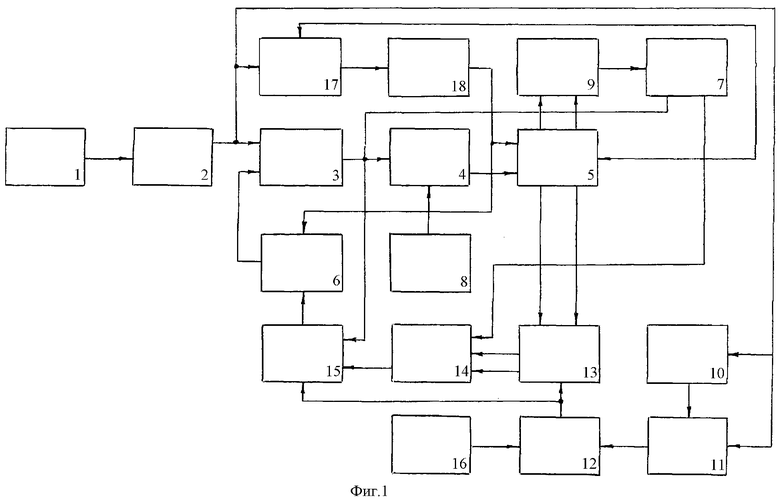
Система анализа телевизионного изображения подвижных объектов, содержащая последовательно соединенные телевизионную камеру, линию связи, блок селекции, блок стробирования и блок определения параметров относительного движения, выход блока селекции соединен с информационным входом видеоконтрольного блока, второй вход блока селекции соединен с выходом блока поиска, а второй вход блока стробирования соединен с выходом измерительного генератора, отличающаяся тем, что, с целью повышения оперативности анализа телевизионного изображения подвижных объектов, введены последовательно соединенные элемент задержки, блок распознавания помех, блок формирования сигнала о помехе, блок памяти, первый и второй выходы которого соединены соответственно с первым и вторым информационными входами блока автоматического управления и коммутатор, выход которого соединен с входом блока поиска, а первый и второй информационные входы - соответственно, с выходом блока селекции и с выходом блока формирования сигнала о помехе, второй вход которого соединен с выходом блока формирования порогового напряжения, выход линии связи соединен с входом элемента задержки, вторым входом блока распознавания и с входом блока определения режимов работы телекамеры, выход которого соединен с входом блока формирования переключающего импульса, выход которого соединен со вторыми входами блока поиска и блока определения параметров относительного движения, первый выход которого соединен с третьим информационным входом блока памяти и первым информационным входом блока формирования телевизионного сигнала выход - со вторыми информационными входами блока памяти и блока формирования телевизионного сигнала, выход которого соединен со вторым информационным входом видеоконтрольного блока, выход которого соединен с управляющими входами блока определения режимов работы телекамеры, блока определения параметров относительного движения и блока автоматического управления, при этом блок определения параметров относительного движения содержит последовательно соединенные элемент совпадения, первый счетчик, первый блок переноса, счетчик с переменным коэффициентом деления, второй счетчик, второй блок переноса, счетчик вычитания, переключатель, блок умножения, выход которого является первым выходом блока определения параметров относительного движения, вторым выходом которого является выход второго счетчика, а управляющим входом является вход блока управления, первый выход которого соединен с первым входом блока совпадения, второй выход - с управляющим входом первого счетчика, третий выход - со вторым входом первого блока переноса, четвертый выход - со вторым входом второго блока переноса, пятый выход - с первым входом генератора числа, второй вход которого соединен с выходом блока формирования импульса переключения, выход генератора числа соединен со вторым входом счетчика с переменным коэффициентом деления, выход которого соединен со вторым входом счетчика вычитания, второй вход блока совпадения соединен с выходом блока стробирования.
| Павлов Б.В | |||
| Кибернетические методы технического диапазона | |||
| М., Машиностроение, 1966 г | |||
| М.Н | |||
| Либенсон и др | |||
| Автоматизация распознавания телевизионных изображений | |||
| М., Энергия, 1975 г., с.50-74. |

