Область техники
Настоящее изобретение относится, главным образом, к области техники устройства электродвигателей, и, в частности, касается привода, оснащенного изогнутым линейным асинхронным двигателем.
Предшествующий уровень техники
Он имеет общее применение, когда двигатель используют для приводимых в движение элементов по криволинейной траектории, такой как круг или его участок. Такой двигатель применим, например, в области техники получения отображения и, в частности, в способе и аппарате для компьютерной томографии (КТ), основанной на получении отображения. Он имеет применение по меньшей мере в таком получении отображения, в котором двигатель осуществляет вращение источника излучения, детектора излучения или как источника, так и детектора по круговой траектории, для того чтобы получить изображение пациента или объекта. Аналогичные системы получения отображения, в которых может применяться изогнутый линейный асинхронный приводной двигатель, включают в себя другие системы получения отображения, основанные на рентгеновском излучении, и нуклеарные медицинские системы получения отображения, такие как ПЭТ и ОФЭКТ. Таким образом, двигатель будет описан в настоящем описании с конкретной ссылкой к системе КТ получения отображения, с пониманием, что он обладает более общей применимостью.
В конкретном случае сканера для получения отображения с помощью КТ источник рентгеновского излучения и один или несколько детекторов рентгеновского излучения прикрепляются на или к вращающейся раме внутри корпуса или гентри сканера. Отображаемый человек или объект располагается внутри гентри между источником рентгеновского излучения и одним или несколькими детекторами рентгеновского излучения, причем они вращаются по криволинейной траектории вокруг человека или объекта. Человека или объект, как правило, помещается на поддерживающий стол, который может двигаться прямолинейно внутрь и наружу апертуры гентри, так что источник рентгеновского излучения и один или несколько детекторов рентгеновского излучения могут быть расположены аксиально в требуемом местоположении при осуществлении сканирования для получения отображения.
Вращающуюся раму, которая несет на себе источник рентгеновского излучения и детекторы, обычно приводят в движение с помощью электродвигателя. В сканерах КТ для получения изображений с массивом детекторов с шестьюдесятью четырьмя или менее пластинами, инерция вращения и диаметр рамы и связанных с ней закрепленных компонентов относительно малы, так что скорость вращения низкая (как правило, приблизительно 180 или менее оборотов в минуту). Поэтому приводом для таких сканеров может служить асинхронный двигатель вращения переменного тока с непрямым ременным приводным соединением с вращающейся рамой или двигатель переменного тока с прямым приводом с кольцевым постоянным магнитом с первичной обмоткой, закрепленной на статоре гентри, и вторичным кольцом постоянного магнита, прикрепленным к вращающейся раме для компактности.
В более современных сканерах КТ для получения изображений с массивом детекторов с двести пятьдесят шестью пластинами массива детекторов для улучшения качества отображения, однако, такие приводы часто могут оказаться не отвечающими требованиям по нескольким причинам. Конструкция массива детекторов в соизмеримо больше и поэтому тяжелее, и этот дополнительный вес и инерцию должна выдерживать вращающаяся рама, и ими должен управлять электрический привод. Кроме того, указанные более современные сканеры КТ для получения отображения, как правило, используют источник рентгеновского излучения с более высоким уровнем мощности, чем более старые сканеры, что повышает вес источника рентгеновского излучения, который также должна выдерживать вращающаяся рама, и которым должен управлять привод. Дополнительно, желательно, чтобы центральное отверстие гентри сканера у указанных более современных сканеров КТ для получения отображения было больше, чем у более старых сканеров, для того чтобы сделать их пригодными для бариатрических пациентов, а также чтобы облегчить проведение интервенционных исследований и процедур. Также желательны более высокие скорости вращения и величины ускорения, для того чтобы улучшить отображение всего пациента. Указанные факторы налагают жесткие ограничения на конструкцию в отношении геометрии, производительности и стоимости и которые трудно удовлетворить с помощью асинхронного двигателя вращения переменного тока с непрямым ременным приводным соединением с вращающейся рамой или двигателя переменного тока прямого привода с кольцевым постоянным магнитом.
Краткое изложение существа изобретения
В соответствии с одним аспектом настоящего изобретения предлагается прямой привод изогнутого линейного асинхронного двигателя. Такой привод изогнутого линейного асинхронного двигателя лучше удовлетворяет требованиям современных сканеров для получения отображения, чем асинхронные двигатели вращения переменного тока с непрямым ременным приводом, или двигатели переменного тока прямого привода с кольцевым постоянным магнитом, применяемые в более старых сканерах. Изогнутый линейный асинхронный приводной двигатель также имеет более общее применение для приведения в движение элементов вдоль криволинейной траектории в любом типе аппаратов.
В соответствии с другим аспектом настоящего изобретения ротор изогнутого линейного асинхронного приводного двигателя содержит кольцо, механически соединенное с вращающейся рамой и имеющее два слоя: алюминиевый слой и стальной слой. В одном варианте данного аспекта настоящего изобретения алюминиевый слой является внутренним слоем роторного кольца, а стальной слой является внешним слоем роторного кольца. В еще одном предпочтительном варианте алюминиевый слой вставлен внутрь и, по меньшей мере, частично удерживается внутри стального слоя посредством посадки с натягом. Алюминиевый слой обеспечивает роторное кольцо вращательной движущей силой. Оно передает данную движущую силу стальному слою, который механически соединен с вращающейся рамой. Одним преимуществом данного аспекта настоящего изобретения, является то, что стальной слой может действовать как теплоотвод от алюминиевого слоя и таким образом способствовать рассеянию тепла от алюминиевого слоя. Дополнительное потенциальное преимущество заключается в том, что стальной слой может замыкать магнитную цепь и содействовать генерации магнитных сил, которые создают крутящий момент.
В соответствии с еще одним аспектом настоящего изобретения предлагается способ изготовления роторного кольца для применения в приводе изогнутого линейного асинхронного двигателя, содержащий этапы процесса посадки с натягом.
Многочисленные дополнительные преимущества и выгоды станут понятны специалисту в данной области техники после прочтения нижеследующего подробного описания предпочтительных вариантов осуществления. Настоящее изобретение может принимать форму с различными компонентами и расположениями компонентов и различными технологическими процессами и порядками технологических процессов.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
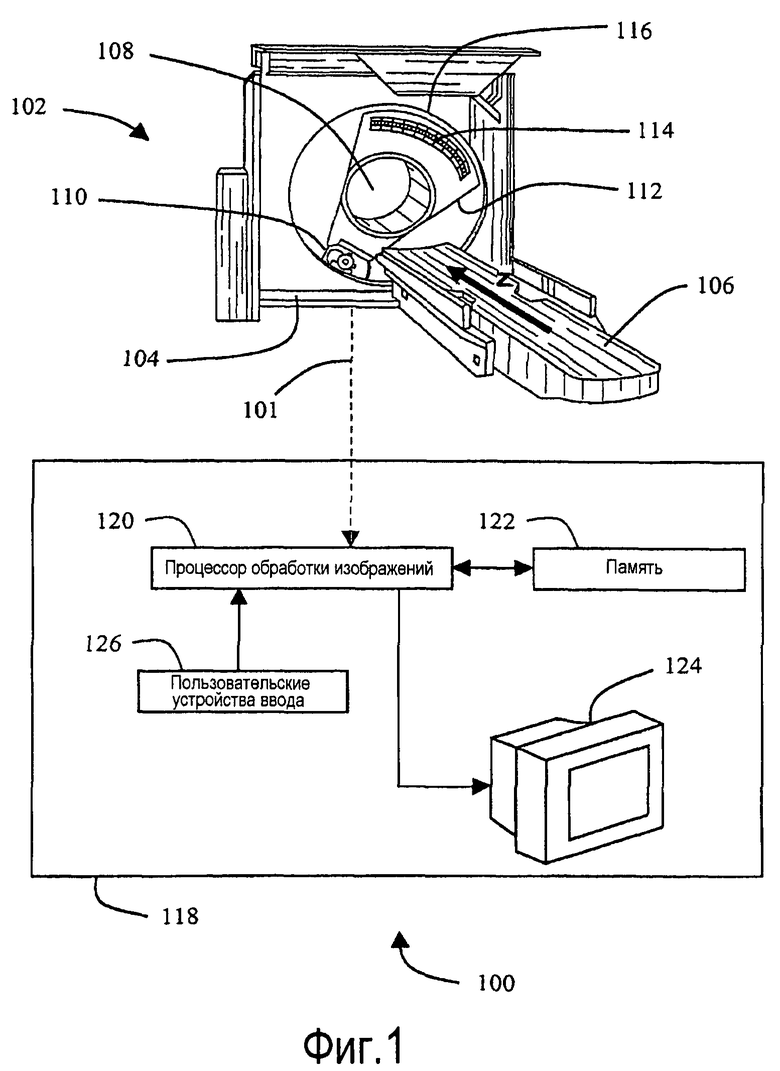
фиг. 1 изображает сканер КТ для получения отображений;
фиг. 2 изображает прямой привод изогнутого линейного асинхронного двигателя;
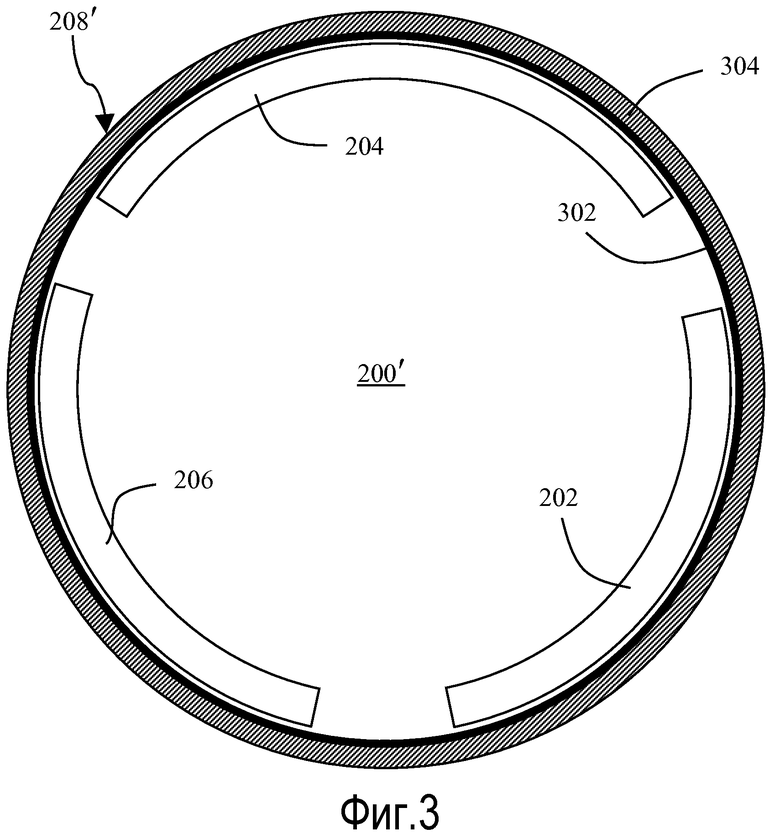
фиг. 3 изображает прямой привод изогнутого линейного асинхронного двигателя, включающий в себя двухслойное роторное кольцо;
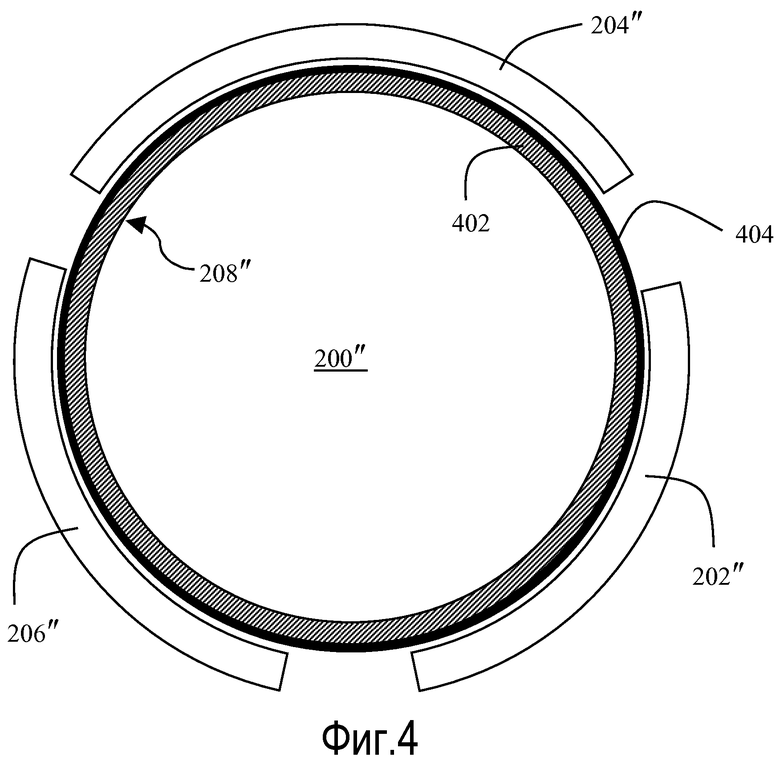
фиг. 4 изображает другой прямой привод изогнутого линейного асинхронного двигателя, включающий в себя двухслойное роторное кольцо;
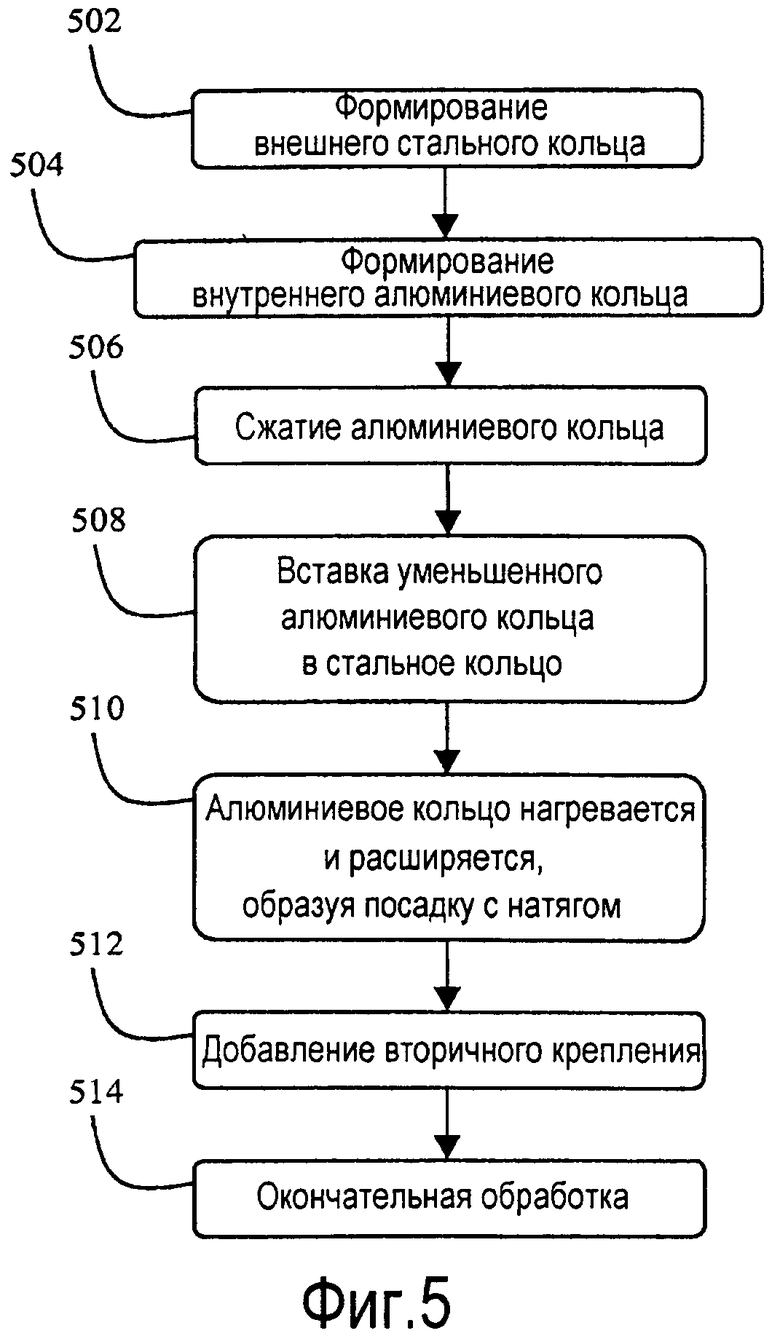
фиг. 5 изображает способ изготовления роторного кольца с посадкой с натягом между двумя слоями; и
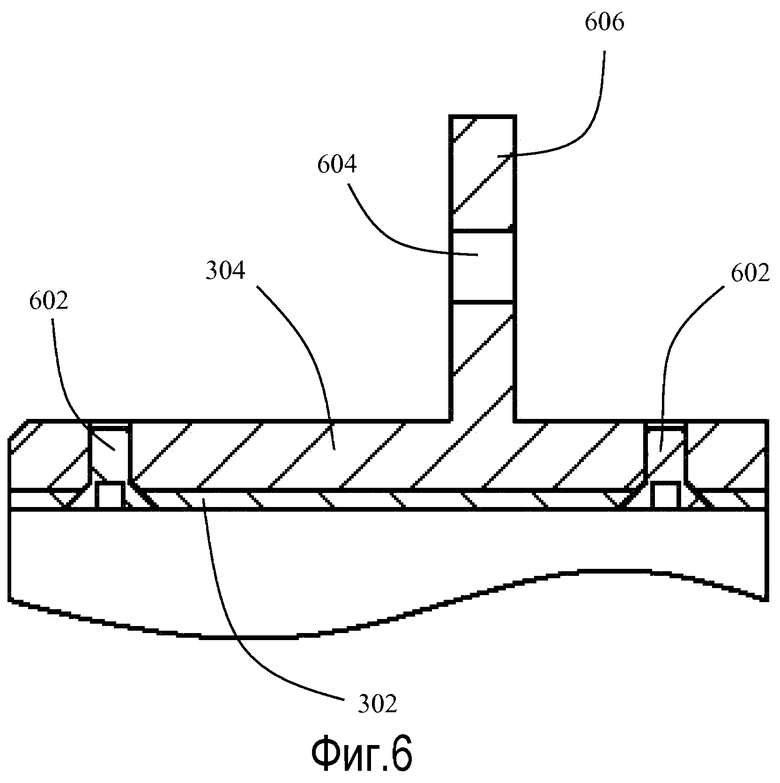
фиг. 6 изображает вторичное крепление для роторного кольца с двумя слоями, соединенными с помощью посадки с натягом; и
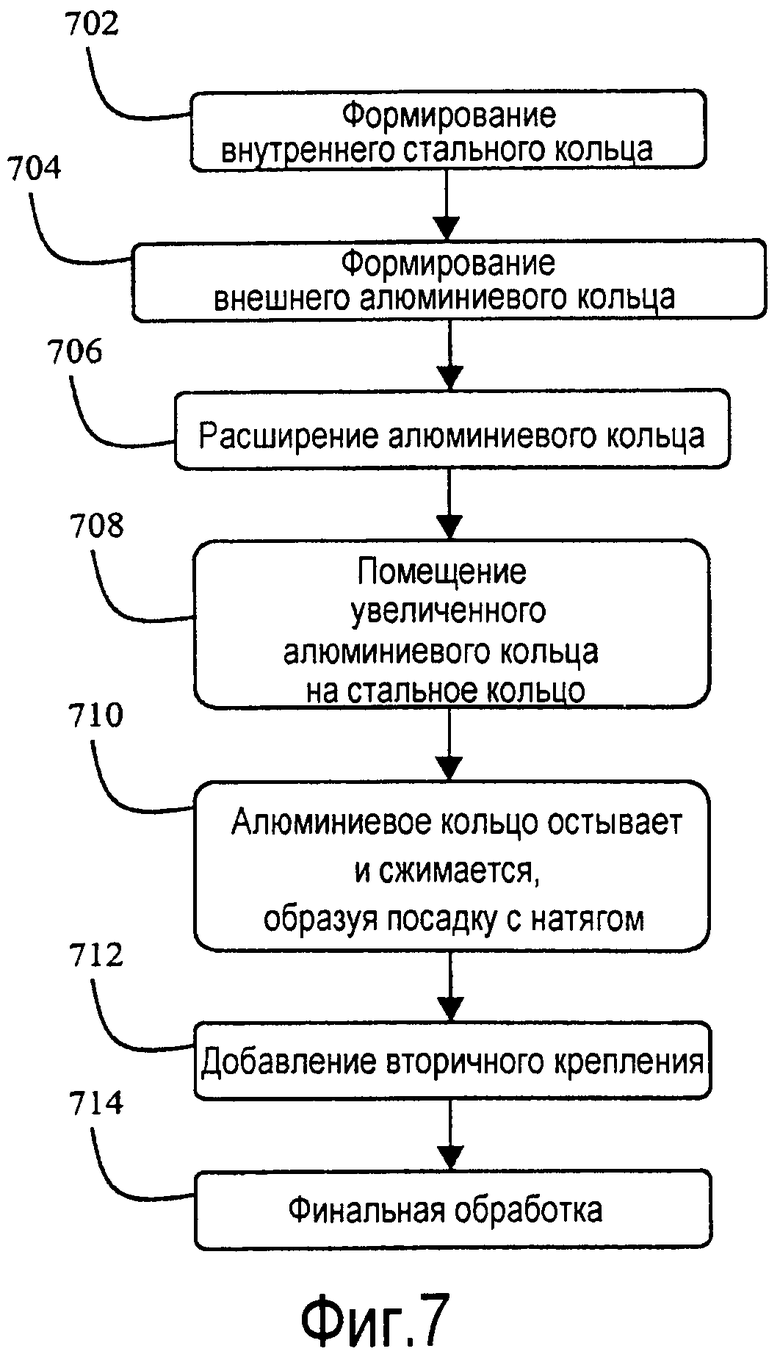
фиг. 7 изображает способ изготовления роторного кольца с посадкой с натягом между двумя слоями.
Описание предпочтительных вариантов воплощения изобретения
Привод изогнутого линейного асинхронного двигателя, описанный в настоящем описании, предназначен, в общем случае, для того, чтобы перемещать приводимые элементы вдоль криволинейной траектории, такой как круг или его часть, хотя он описан в конкретном контексте аппарата КТ для получения отображений.
На фиг. 1 показан один пример сканера 100 КТ для получения отображений для осуществления сканирования для получения отображений. Система 102 КТ для получения отображений включает в себя гентри 104 и стол 106, который перемещается вдоль оси z. Пациента или другой отображаемый объект (не показан) кладут на стол 106 и перемещают так, чтобы он оказался расположен внутри отверстия 108 в гентри 104. Когда пациент или объект оказывается в заданном положении, источник 110 рентгеновского излучения излучает проекцию рентгеновских лучей 112, собираемых массивом 114 детекторов рентгеновского излучения внутри гентри 104 (Часть 116 гентри 104 обрезана на фиг. 1, для того чтобы показать источник 110 рентгеновского излучения и массив 114 детекторов рентгеновского излучения, которые расположены внутри гентри 104). Источник 110 рентгеновского излучения и массив 114 детекторов рентгеновского излучения вращаются вместе вокруг отверстия 108, для того чтобы зарегистрировать данные отображений КТ из различных положений, часто в сочетании с линейным перемещением стола 106. Данное вращение становится возможным благодаря тому, что как источник 110 рентгеновского излучения, так и массив 114 детекторов прикреплены каждый к вращающейся раме (не показана) внутри гентри 104. Рама может быть установлена с возможностью вращения в гентри 104 любым способом, таким как, например, с помощью воздушных подшипников или стальных роликовых подшипников.
Система 102 КТ получения отображений затем передает данные отображений КТ в систему 118 обработки и демонстрации отображений КТ через линию 101 связи. Хотя системы 102 и 118 показаны и описаны в настоящем описании как отдельные системы с целью иллюстрации, в других вариантах осуществления они могут быть частью одной системы. Данные отображений КТ передаются на процессор 120 обработки изображений, который сохраняет данные в памяти 122. Процессор 120 обработки изображений обрабатывает в электронном виде указанные данные отображений КТ, для того чтобы генерировать изображения отображаемого пациента или другого объекта. Процессор обработки изображений 120 может выводить полученные в результате изображения на присоединенный дисплей 124. Пользователю могут предоставляться пользовательские устройства 126 ввода, такие как клавиатура и/или мышь, для управления процессором 120.
Как уже упоминалось, как источник 110 рентгеновского излучения, так и массив 114 детекторов прикреплены к вращающейся раме, помещенной внутри гентри 104. Вращение рамы осуществляется прямым приводом изогнутого линейного асинхронного двигателя. Пример такого привода 200 двигателя показан на фиг. 2. Двигатель 200 преобразует электрическую энергию в механическую энергию, для того чтобы обеспечить вращательное позиционирование вращающейся рамы и, следовательно, источника 110 рентгеновского излучения и массива 114 детекторов, закрепленных на раме, для осуществления КТ сканирования управляемым образом. Изображенный в качестве примера прямой привод 200 сегментированного линейного асинхронного двигателя включает в себя три сегмента 202, 204 и 206 статора, причем каждый из них включает в себя пакет первичной обмотки изогнутого линейного асинхронного двигателя. Изогнутые сегменты статора закреплены внутри гентри 104 и не двигаются. При том, что на фиг. 2 показано три таких изогнутых сегмента статора, может применяться любое количество таких сегментов статора, включая единый статор. Предпочтительно применяются два, три или четыре изогнутых сегмента и размещаются симметрично вокруг изогнутых сегментов статора. Таким образом, радиальные силы притяжения между изогнутыми сегментами статора и ротором или сегментами ротора (описаны ниже) уравновешиваются так, что взаимно уничтожаются.
Сегменты 202, 204, 206 статора размещаются симметрично внутри окружности вторичного роторного реактивного кольца 208. Роторное кольцо 208, в свою очередь, механически соединено с вращающейся рамой, хотя это не показано на фиг. 2. Таким образом, электрически получаемое вращение роторного кольца 208 внутри гентри 104 заставляет также вращаться и раму. Каждый изогнутый сегмент 202, 204, 206 статора двигателя 200 создает одну треть силы тяги, необходимой для того, чтобы начать или остановить вращательное движение ротора 208 вокруг неподвижных сегментов статора.
Роторное кольцо 208 показано на фиг. 2 как "целое" кольцо, то есть оно представляет собой единый сегмент, который образует законченый и неразорванный круг. В других, альтернативных вариантах осуществления кольцо 208 может состоять из более чем одного сегмента. Количество сегментов, как и величина промежутков между сегментами, образующих, соответственно, статор и ротор двигателя предпочтительно выбирают так, чтобы избежать каких-либо "мертвых" положений ротора вокруг статора.
Обычный электронный сервопривод или другой привод 210 работает с возможностью изменения тока, напряжения или частоты электропитания каждого из сегментов 202, 204 и 206 статора, для того чтобы перемещать ротор 208, как правило, без необходимости в коммутировании. Хотя для приведения во вращение применяют переменный ток, для торможения вращения можно применять как переменный, так и постоянный ток. Обычное устройство 212 обратной связи обеспечивает обратную связь от ротора 208 к приводу 210, указывая текущее вращательное положение ротора 208 (и, следовательно, источника 110 рентгеновского излучения и массива 114 детектора рентгеновского излучения, прикрепленных к ротору 208 посредством рамы). Двигатель 200, привод 210 и устройство 212 обратной связи вместе образуют всю систему 214 вращательного прямого привода.
В одном варианте осуществления, показанном на фиг. 3, двигатель 200' содержит те же самые изогнутые сегменты 202, 204 и 206 статора с фиг. 2. В двигателе 200' вторичное роторное реактивное кольцо 208' представляет собой целое кольцо, составленное из двух слоев, внутреннего слоя 302 и внешнего слоя 304. Внутренний слой 302 выполнен из проводника с хорошей электропроводностью, такого как, например, алюминий, медь или серебро. Внутренний слой 302 предпочтительно выполнен из алюминия и относительно тонок, порядка приблизительно 2 миллиметров в радиальной толщине. Внешний слой 304 обеспечивает механическую опору и жесткость реактивному кольцу 208' и предпочтительно также состоит из магнитного материала, для того чтобы замкнуть магнитную цепь и содействовать генерации магнитных сил, которые производят крутящий момент. Поэтому подходящие материалы для внешнего слоя 304 включают в себя железо или железный сплав, такой как сталь, и, в частности, низкоуглеродистую сталь. Внешний стальной слой 304 является относительно толстым, порядка приблизительно 6 миллиметров в радиальной толщине. Внутренний слой 302, внешний слой 304 или они оба могут состоять из множества сегментов, в отличие от форм с одним сегментом, показанных на фиг. 3.
Что касается варианта осуществления на фиг. 3, где внутренний слой 302 является алюминиевым, а внешний слой 304 является стальным, изогнутые сегменты 202, 204, 206 статора состоят из трех идентичных сегментов пластины из кремнистой стали с медными обмотками вокруг пазов пластины. Уложенные в пазы обмотки статора смотрят наружу, по направлению к внутреннему алюминиевому слою 302 ротора 208', для того чтобы индуцировать электрический ток и вращать ротор 208'. Таким образом, внутренний алюминиевый слой 302 обеспечивает основную вращательный движущую силу для ротора 208' в ответ на магнитное взаимодействие между изогнутыми сегментами 202, 204 и 206 статора и алюминием.
Внешний стальной слой 304, в свою очередь, механически соединен с вращающейся рамой (как показано, например, на фиг. 6). Данное механическое соединение может представлять собой прямое соединение, при котором не существует промежуточных структурных элементов между кольцом 208' и рамой, или оно может быть непрямым, когда есть промежуточные элементы. Одним примером непрямого механического соединения является случай, когда кольцо 304 прикреплено болтами к обойме воздушного подшипника или роликового подшипника, а обойма в свою очередь прочно прикреплена к раме.
В альтернативном изогнутом линейном асинхронном двигателе 200" системы прямого привода, показанном на фиг. 4, изогнутые сегменты 202", 204" и 206" статора могут располагаться на внешней стороне ротора 208". В двигателе 200" вторичное роторное реактивное кольцо 208" представляет собой целое кольцо, составленное из двух слоев, внутреннего слоя 402 и внешнего слоя 404. Внутренний слой 402 обеспечивает механическую опору и жесткость реактивному кольцу 208" и предпочтительно также выполнен из магнитного материала, для того чтобы замкнуть магнитную цепь и содействовать генерации магнитных сил, которые производят крутящий момент. Поэтому подходящие материалы для внутреннего слоя 402 включают в себя железо или железный сплав, такой как сталь, и, в частности, низкоуглеродистую сталь. Внутренний стальной слой 402 является относительно толстым, порядка приблизительно 6 миллиметров в радиальной толщине. Внешний слой 404 выполнен из проводника с хорошей электропроводностью, такого как, например, алюминий, медь или серебро. Внешний слой 404 предпочтительно выполнен из алюминия и относительно тонок, порядка приблизительно 2 миллиметров в радиальной толщине. Внутренний слой 402, внешний слой 404 или они оба могут состоять из множества сегментов, в отличие от форм с одним сегментом, показанных на фиг. 3.
Что касается варианта осуществления на фиг. 4, где внутренний слой 402 является стальным, а внешний слой 404 является алюминиевым, изогнутые сегменты 202", 204", 206" статора состоят из трех идентичных сегментов пластины из кремнистой стали с медными обмотками вокруг пазов пластины. Уложенные в пазы обмотки статора смотрят внутрь, по направлению к внешнему алюминиевому слою 404 ротора 208", для того чтобы индуцировать электрический ток и вращать ротор 208". Таким образом, внешний алюминиевый слой 404 обеспечивает основную вращательный движущую силу ротору 208" в ответ на магнитное взаимодействие между изогнутыми пластинами 202", 204" и 206" статора и алюминием. Внутренний стальной слой 402, в свою очередь, механически соединен с вращающейся рамой, например, с помощью болтов (не показаны). Внутренний слой 402, внешний слой 404 или они оба могут состоять из множества сегментов, в отличие от форм с одним сегментом, показанных на фиг. 4.
Одним преимуществом вариантов осуществления, показанных на фиг. 3 и 4, является то, что стальной слой отводит тепло от алюминиевого слоя, а также содействует замыканию магнитной цепи и генерации магнитных сил, которые производят крутящий момент. Поскольку стальной слой гораздо больше, чем алюминиевый слой, такой перенос тепла минимизирует температурные деформации каждого слоя.
Ротор 208' с фиг. 3 может быть изготовлен с помощью посадки с натягом между внутренним алюминиевым кольцом 302 и внешним стальным кольцом 304. Важнейшим преимуществом применения такой посадки с натягом является по существу равномерное распределение напряжений по всей окружности ротора 208', что приводит к оптимальной производительности двигателя 200'. Предварительный натяг или полученные в результате остаточные напряжения алюминиевого кольца 302, впрессованного в стальное кольцо 304, обеспечивает равномерную силу трения, которая препятствует относительному движению двух частей 302 и 304. Благодаря посадке с натягом магнитодвижущая сила, которую создает изогнутый линейный асинхронный двигатель 200' в алюминиевом кольце 302, передается на стальное кольцо 304. Кроме того, постоянное сжатие по окружности ротора 208' способствует предупреждению нарастания нагрузки в отдельной точке внутреннего алюминиевого кольца 302. Такие нарастания нагрузки способны вызвать повреждение алюминиевого кольца 302, которое является относительно тонким по сравнению с внешним стальным кольцом 304. Другой характерной чертой посадки с натягом является то, что сжимающие силы поддерживают контакт внутреннего алюминиевого кольца 302 с внешним стальным кольцом 304 по существу по всей окружности границы соприкосновения. Это способствует выполнению стальным кольцом 304 роли теплоотвода по отношению к алюминиевому кольцу 302.
Такая посадка с натягом может быть достигнута, например, посредством тепловой посадки алюминиевого кольца 302 в стальное кольцо 304. На фиг. 5 показан пример способа обеспечения посадки с натягом внутреннего алюминиевого кольца 302 во внешнее стальное кольцо 304. На этапе 502 стальное кольцо 304 формируют, например, посредством механической обработки, так чтобы оно имело приблизительно подходящую геометрию для данного применения. На этапе 504 по существу прямоугольную алюминиевую пластину раскатывают, и ее концы сваривают вместе, для того чтобы сформировать внутреннее алюминиевое кольцо 302. Внешний диаметр внутреннего алюминиевого кольца 302 немного больше, чем внутренний диаметр внешнего стального кольца 304. Два первых этапа 502 и 504 данного способа могут осуществляться в любом порядке. Внутреннее алюминиевое кольцо 302 помещают в холодную среду, для того чтобы заставить его сжаться 506 в размере. Например, кольцо 302 можно поместить в ванну с жидким азотом или другим веществом, достаточно холодным, для того чтобы заставить алюминий сжиматься. Внутреннее алюминиевое кольцо 302 остается в холодной среде до тех пор, пока внешний диаметр внутреннего алюминиевого кольца 302 не станет меньше, чем внутренний диаметр внешнего стального кольца 304. Уменьшенное внутреннее алюминиевое кольцо 302 затем вставляют 508 во внешнее стальное кольцо 304 и обеспечивают его нагрев и таким образом расширение. Поскольку внутреннее алюминиевое кольцо 302 расширяется 510, между двумя кольцами 302 и 304 образуются остаточные сдавливающие напряжения, что приводит к силам трения, которые удерживают кольца вместе. Вторичное крепление, такое как крепежные средства или клеящее средство, можно добавить 512, для того чтобы усилить связь между двумя кольцами 302, 304. Конструкцию в сборе подвергают механической или какой-либо еще обработке 514, для того чтобы обеспечить спецификацию по размеру для конкретного применения. Такая окончательная обработка может включать в себя, например, механическую обработку внутреннего диаметра алюминиевого кольца, для того чтобы подогнать его под определенные размеры.
Как упоминалось, вторичное крепление может быть применено 512 в дополнение к посадке с натягом, для того чтобы удержать внутреннее алюминиевое кольцо 302 внутри внешнего стального кольца 304. Одно из таких дополнительных креплений может включать в себя зенкование винтов 602 во внутреннее алюминиевое кольцо 302 и внешнее стальное кольцо 304, как показано на фиг. 6. Применение таких винтов 602 добавляет дополнительные силы сжатия между внутренним алюминиевым кольцом 302 и внешним стальным кольцом 304, для того чтобы увеличить силу трения и сделать соединение более крепким. Как также показано на фиг. 6, внешнее стальное кольцо 304 может включать в себя ряд петель 604 с отверстиями 606 в них для помещения болта, для того чтобы образовать механическое соединение кольца 304 с вращающейся рамой, как описано выше.
Другой тип вторичного крепления предполагает применение клеящего средства между внутренним алюминиевым кольцом 302 и внешним стальным кольцом 304, которое затвердеет, как только указанные два кольца удерживаются вместе с помощью посадки с натягом. Клеящее средство может как затвердевать в течение промежутка времени в естественной атмосфере, так и затвердевать анаэробно (в отсутствие воздуха). Клеящее средство предпочтительно представляет собой жидкость при температуре, до которой охлаждают алюминиевое кольцо 302, до того как его вставляют в стальное кольцо 304, так что клеящее средство не испытывает негативного влияния, до того как алюминий полностью нагреется. Кроме того, клеящее средство предпочтительно существенно не влияет на перенос тепла между алюминием и сталью, таким образом, обеспечивая, по существу, свободную передачу тепла от алюминия к стали.
Вариант осуществления с фиг. 4 можно также выполнить с помощью посадки с натягом между внутренним стальным кольцом 402 и внешним алюминиевым кольцом 404. Такая посадка с натягом может быть достигнута, например, посредством тепловой посадки внешнего алюминиевого кольца 404 на внутреннее стальное кольцо 402. На фиг. 7 показан такой способ. При этом формируют 702 внутреннее стальное кольцо 402 и формируют 704 внешнее алюминиевое кольцо 404. Внешний диаметр внутреннего стального кольца 402 немного больше, чем внутренний диаметр внешнего алюминиевого кольца 404. Внешнее алюминиевое кольцо 404 затем помещают в печь или другую нагретую среду, для того чтобы вызвать его увеличение 706 в размере, до тех пор пока его внутренний диаметр не станет больше, чем внешний диаметр внутреннего стального кольца 402. Увеличенное внешнее алюминиевое кольцо 404 затем помещают 708 вокруг внутреннего стального кольца 402 и позволяют ему остыть и таким образом сжаться 710. Поскольку внешнее алюминиевое кольцо 404 сжимается, между двумя кольцами 402 и 404 образуются остаточные сдавливающие напряжения, что приводит к силам трения, которые удерживают кольца вместе. Вторичное крепление, такое как крепежные средства или клеящее средство, можно добавить 712, для того чтобы усилить связь между двумя кольцами 402, 404. Финальную конструкцию подвергают механической или какой-либо еще обработке, для того чтобы обеспечить спецификацию по размеру для конкретного применения. Такая финальная обработка может включать в себя, например, механическую обработку внешнего диаметра алюминиевого кольца, для того чтобы подогнать его под определенные размеры.
На основании определенных параметров конструкции данного сканера КТ получения отображений, таких как требования по силе тяги и скорости вращения, конструкцию двигателя 200 и выбор привода 210 рассматривают вместе, для того чтобы минимизировать необходимый номинальный уровень мощности в вольт-амперах и уменьшить объем, занимаемый системой 214 привода в гентри 104, а также ее стоимость. Ориентацию и местоположение ротора 208 и изогнутых пакетов 202, 204 и 206 статора можно определить с учетом доступного пространства в гентри. В предпочтительном варианте осуществления двигатель 200 может представлять собой трехфазный асинхронный двигатель с тремя сегментированными статорами, соединенными последовательно или параллельно или по схеме «звезда», или по схеме «треугольник».
Конструкцию системы 214 прямого привода сегментированного линейного асинхронного двигателя для конкретного аппарата КТ получения отображений можно оптимизировать следующим образом. Во-первых, определяют величину W системы 214 привода электродвигателя в соответствии с необходимой пиковой величиной силы тяги F, пиковой линейной скоростью ν, коэффициентом полезного действия двигателя η и коэффициентом мощности двигателя cosθ. Линейные напряжение и ток на выходе системы 214 привода двигателя определяют на основании величины W. Из этого напряжения и тока можно рассчитать ограничение фазного тока и напряжения каждого сегмента статора. Наконец, выбирают конструкцию пакетных статоров линейного асинхронного двигателя, так чтобы обеспечить требуемую выходную силу тяги при требуемой линейной скорости, или эквивалентную частоту возбуждения с подходящей частотой скольжения.
В предпочтительном варианте осуществления величину W выбирают в соответствии со следующей формулой:
Как только определено требуемое пиковое линейное напряжение VL, можно рассчитать линейный ток IL привода для трехфазного привода в соответствии с формулой

Три фазы двигателя могут быть соединены по схеме «треугольник» или по схеме «звезда». В качестве типичного примера для демонстрации процесса разработки далее предполагается, что три фазы двигателя соединены по схеме «треугольник». Для трех статорных пакетов двигателя, таких как 202, 204, 206, соединенных параллельно, фазное напряжение каждого пакета двигателя является таким же, как линейное напряжение VL привода, а фазный ток пакета двигателя определяется из

Таким образом, предположим, например, что пиковая сила тяги F составляет 900 ньютонов, пиковая линейная скорость v составляет 18,4 метров в секунду, коэффициент полезного действия η линейного двигателя составляет 48% или 0,48 и коэффициент мощности cosθ линейного двигателя составляет 0,55 при пиковой скорости. При применении уравнения 1 к данным техническим характеристикам системы величина W привода составляет 62727 вольт-ампер для пиковой мощности. Если пиковое линейное напряжение VL на выходе привода составляет 460 вольт, то, в соответствии с уравнением 2, пиковый линейный ток IL привода составит 78,7 ампер. Для трех пакетов 202, 204, 206 двигателя, соединенных параллельно по схеме «треугольник», при применении уравнения 3 фазный ток каждого элемента двигателя составляет 15,2 ампера, а фазное напряжение на каждом пакете двигателя составляет 460 вольт.
Если фазный ток и фазное напряжение пакетов линейного асинхронного двигателя определены, следующим этапом является разработка пластины и схем обмотки пакетов двигателя, для того чтобы достичь требуемого уровня силы тяги при требуемой скорости. В типичном примере, описанном выше, каждый пакет двигателя должен достигать силы тяги 300 ньютонов при пиковой скорости 18,4 метров в секунду. С помощью данного итерационного процесса разработки двигателя пытаются максимизировать генерирование силы тяги при пиковой скорости посредством согласования полного сопротивления двигателя и полностью используют вычисленные фазные ток и напряжение. Детали проектирования пластины и разработки схемы обмотки для сегментов статора в случае, когда требования и ограничения разработки определены, хорошо известны среднему специалисту в данной области техники.
Для предупреждения перегрева линейного асинхронного двигателя тепловые датчики, такие как датчики отрицательного температурного коэффициента (NTC), можно встроить во все фазы статоров. Такие датчики можно поместить в наиболее вероятных горячих точках двигателя, в том числе вблизи от центра сегментов статора, таких как 202, 204 и 206. Тепловые датчики применяют для измерения температуры двигателей в реальном времени, так что сегменты статора могут быть отключены при достижении заранее установленной критической температуры, что защищает, таким образом, сегменты двигателя от перегрева. Для достижения данной цели тепловые выключатели можно расположить в непосредственной близости от каждого теплового датчика, для того чтобы отключить питание от потенциально перегревающегося сегмента двигателя. Тепловые выключатели могут, например, при нормальных условиях эксплуатации выключаться при температуре выключения равной 150 градусам Цельсия. Тепловой выключатель будет задействован, для того чтобы отключить питание привода, когда тепловой датчик достигнет 150 градусов Цельсия.
Настоящее изобретение описано со ссылкой на предпочтительные варианты осуществления. Очевидно, кому-то на ум придут модификации и изменения после прочтения и усвоения предшествующего подробного описания. Следует понимать, что настоящее изобретение следует интерпретировать как включающее в себя все такие модификации и изменения в той мере, в которой они попадают под объем формулы изобретения или ее эквивалентов. Настоящее изобретение может принимать форму различных компонентов и расположений компонентов и различных этапов и расположений этапов. Чертежи даны только с целью иллюстрирования предпочтительных вариантов осуществления и не должны рассматриваться как ограничивающие настоящее изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕНТРИ ДЛЯ СИСТЕМЫ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2009 |
|
RU2543494C2 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ С ПЕЧАТНОЙ МАТРИЦЕЙ ОРГАНИЧЕСКИХ ФОТОДИОДОВ | 2010 |
|
RU2538030C2 |
| ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ С ПЕЧАТНОЙ МАТРИЦЕЙ ФОТОДЕТЕКТОРОВ | 2010 |
|
RU2542588C2 |
| ИНТЕГРИРУЮЩИЙ ДЕТЕКТОР С РЕГИСТРАЦИЕЙ СЧЕТА | 2008 |
|
RU2489733C2 |
| ВЫРАВНИВАНИЕ СИСТЕМ КООРДИНАТ ВНЕШНЕЙ ЛУЧЕВОЙ РАДИОТЕРАПИИ И СИСТЕМ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2014 |
|
RU2677049C2 |
| СПЕКТРАЛЬНЫЙ ДЕТЕКТОР ИЗОБРАЖЕНИЯ | 2012 |
|
RU2595795C2 |
| ПОЛУЧЕНИЕ КОМПЬЮТЕРНО-ТОМОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2007 |
|
RU2452385C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ КОМПЬЮТЕРНЫХ ТОМОГРАФИЧЕСКИХ ИЗОБРАЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ ГЕОМЕТРИЙ СО СМЕЩЕННЫМ ДЕТЕКТОРОМ | 2010 |
|
RU2550542C2 |
| ОПОРА ДЛЯ ОБЪЕКТА СИСТЕМЫ ВИЗУАЛИЗАЦИИ | 2013 |
|
RU2637822C2 |
| СПОСОБ ФОРМОВАНИЯ РОТОРА ЭЛЕКТРОВИНТОВОЙ УСТАНОВКИ И РОТОР ЭЛЕКТРОВИНТОВОЙ УСТАНОВКИ (ВАРИАНТЫ) | 2008 |
|
RU2493369C2 |
Изобретение относится к приводу, оснащённому изогнутым линейным асинхронным электродвигателем. Технический результат заключается в повышении надёжности конструкции системы привода для работы при повышенном весе и инерции вращающейся рамы, а также в возможности увеличения центрального отверстия гентри. Предлагается прямой привод с изогнутым линейным асинхронным двигателем. Ротор двигателя механически прикреплен к вращающейся раме и может содержать два слоя: алюминиевое кольцо и стальное кольцо. Статор двигателя содержит один или несколько сегментов, выполненных изогнутыми и управляемых приводным блоком. Изогнутые сегменты статора расположены внутри окружности кольца ротора, причём внешняя кривая изогнутых сегментов статора близко совпадает с внутренней кривой кольца ротора. 14 з.п. ф-лы, 7 ил.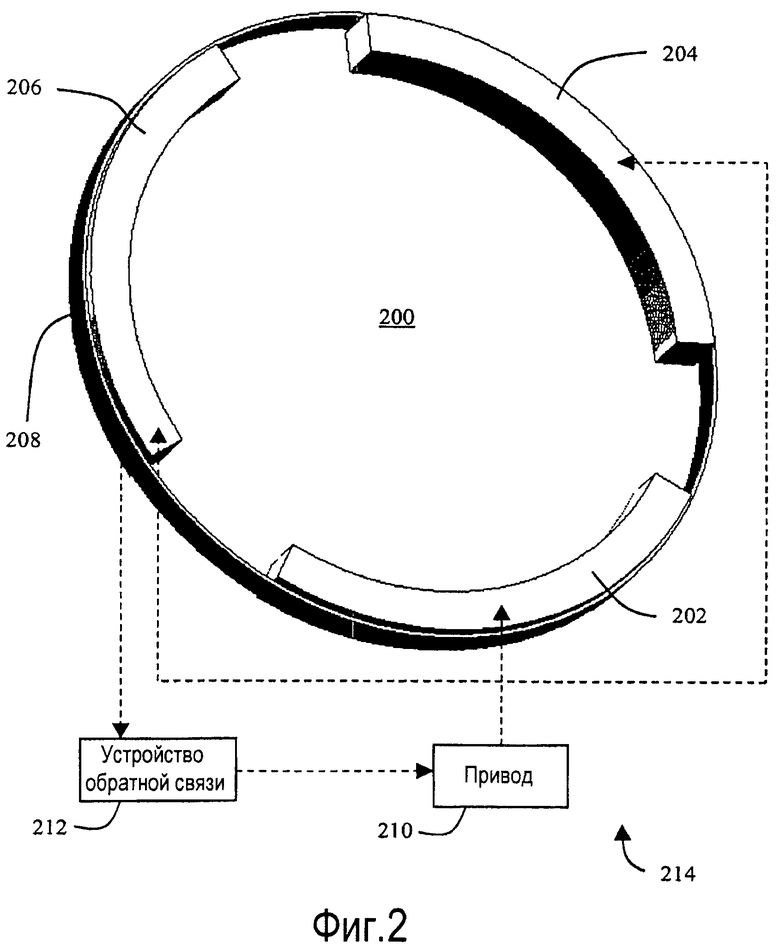
1. Система привода с изогнутым линейным асинхронным двигателем, содержащая двигатель (200), управляемый приводным блоком (210), причем двигатель (200) содержит статор и ротор, статор содержит один или несколько сегментов (202, 204, 206) статора, которые изогнуты и управляются приводным блоком (210), а ротор содержит кольцо (208, 208'), механически соединенное с рамой, выполненной с возможностью вращения, причем ротор приводится в движение магнитным полем посредством одного или более изогнутых сегментов (202, 204, 206) статора таким образом, что он вращается по криволинейной траектории, отличающаяся тем, что изогнутые сегменты (202, 204, 206) статора расположены внутри окружности кольца (208, 208'), и внешняя кривая изогнутых сегментов (202, 204, 206) статора близко совпадает с внутренней кривой кольца (208, 208').
2. Система по п.1, в которой кольцо выполнено по меньшей мере из двух кольцевых сегментов, разделенных промежутками между кольцевыми сегментами.
3. Система по п.1 или 2, в которой по меньшей мере один источник (110) излучения и детектор (114) излучения прикреплен к раме, выполненной с возможностью вращения.
4. Система по п.1 или 2, в которой кольцо (208') содержит внутренний слой (302) и внешний слой (304), причем один из внутреннего слоя (302) и внешнего слоя (304) содержит электрический проводник, приводимый в движение с помощью магнитного поля посредством изогнутых сегментов статора, а другой слой из внутреннего и внешнего слоев (302, 304) замыкает магнитную цепь и обеспечивает механическую опору электрическому проводнику.
5. Система по п.4, в которой электрический проводник содержит алюминий, а другой слой из внутреннего и внешнего слоев (302, 304) содержит сталь.
6. Система по п.4, в которой внутренний слой (302) кольца (208') представляет собой электрический проводник, а внешний слой (304) кольца (208') замыкает магнитную цепь и обеспечивает механическую опору внутреннему слою (302).
7. Система по п.4, в которой внутренний слой (302) кольца (208') удерживается внутри внешнего слоя (304) посредством посадки с натягом между внутренним и внешним слоями (302, 304).
8. Система по п.7, дополнительно содержащая вторичное крепление (602) между внутренним и внешним слоями (302, 304) кольца (208').
9. Система по п.1 или 2, в которой присутствуют три, четыре или пять изогнутых сегментов (202, 204, 206) статора.
10. Система по п.1 или 2, в которой двигатель (200) представляет собой трехфазный асинхронный двигатель с тремя изогнутыми сегментами (202, 204, 206) статора, и величина W, соответствующая мощности в вольт-амперах, определена по уровню пиковой силы тяги F, пиковой линейной скорости ν, коэффициенту полезного действия двигателя η и коэффициенту мощности двигателя cos θ в соответствии с
11. Система по п.10, в которой линейный ток IL привода определен по величине W, соответствующей мощности в вольт-амперах, и пиковому линейному напряжению VL в соответствии с
12. Система по п.1 или 2, расположенная внутри аппарата (100) получения отображения.
13. Система по п.1, в которой ротор содержит алюминиевый слой (302), приводимый в движение с помощью магнитного поля посредством одного или более изогнутых сегментов (202, 204, 206) статора таким образом, что он вращается по криволинейной траектории.
14. Система по п.13, в которой алюминиевый слой (302) расположен в кольце (208'), которое механически соединено с рамой, выполненной с возможностью вращения.
15. Система по п.13 или 14, в которой по меньшей мере один источник (110) излучения или детектор (114) излучения соединен с ротором.
| US 2002031201 A1, 14.03.2002 | |||
| WO 03105320 A1, 18.12.2003 | |||
| US 7477721 B2, 13.01.2009 | |||
| US 6380646 B1, 30.04.2002 | |||
| РАЗМЕТОЧНЫЙ ШТАНГЕНЦИРКУЛЬ | 1967 |
|
SU215523A1 |
| Асинхронный электродвигатель | 1959 |
|
SU132318A1 |
| Асинхронный электродвигатель с разомкнутым магнитопроводом для электропроигрывающего устройства | 1981 |
|
SU964889A1 |

