Нижеследующее в целом относится к опоре для объекта системы визуализации, выполненной с возможностью обеспечивать поддержку субъекта или объекта в исследуемой области системы визуализации до, во время и/или после сканирования указанного субъекта или объекта, и описывается с конкретным применением к компьютерной томографии (КТ). Однако нижеследующее также соответствует другим способам медицинской визуализации, таким как позитронно-эмиссионная томография (ПЭТ), однофотонная эмиссионная компьютерная томография (ОФЭКТ), магнитно-резонансная томография (МРТ), ультразвуковой (УЗ), рентгеновский и/или другие способы медицинской визуализации, и/или их сочетаниям.
Компьютерный томограф (КТ-сканнер) включает в себя вращающийся участок, поддерживаемый с возможностью вращения стационарным участком. Указанный вращающийся участок поддерживает рентгеновскую трубку, испускающую излучение, которое пересекает исследуемую область и субъект или предмет, находящийся в ней, а также детекторную решетку, которая регистрирует излучения, пересекающее исследуемую область, и генерирует сигнал, указывающий обнаруженное излучение. Опора для объекта обеспечивает поддержку субъекта или объекта в исследуемой области до, во время и/или после сканирования, например, для загрузки субъекта или объекта, подачи указанного субъекта или объекта внутрь исследуемой области и удаления указанного субъекта или объекта из исследуемой области, а также выгрузки данного субъекта или объекта. Устройство восстановления восстанавливает сигнал и генерирует данные объемного изображения, указывающие на участок субъекта или объекта внутри исследуемой области.
Упомянутая опора для объекта включала в себя основание, прикрепленное к полу кабинета для исследований и выполненное с возможностью двигаться вертикально, под электронным управлением, относительно пола, а также столешницу, которая присоединена к указанному основанию и выполнена с возможностью перемещаться горизонтально, под электронным управлением либо ручным управлением пользователя, относительно основания, внутрь и из исследуемой области до, во время и/или после сканирования. Указанная столешница прикреплялась с возможностью перемещения к указанному основанию посредством опор линейного скольжения и механического привода линейного перемещения, такого как ходовой винт, который содержит резьбовой вал, зафиксированный к основанию, и комплементарную гайку с резьбой, прикрепленную к столешнице. Данный резьбовой вал вращается, что обеспечивает винтообразный путь для указанной гайки, которая перемещается вдоль указанного резьбового вала. Вращение резьбового вала заставляет гайку линейно продвигаться вдоль оси данного резьбового вала и, следовательно, столешницу линейно перемещаться вдоль направляющих.
Обычно резьбовой вал требует жестких допусков на механическую обработку и/или на совмещение, поскольку неточности при механической обработке и/или смещение могут вызвать нежелательную горизонтальную передачу усилия, которая препятствует перемещению гайки вдоль винта с резьбой. Нежелательная горизонтальная передача усилия может привести к перерыву в работе системы визуализации (например, с целью замены либо повторного выравнивания указанного винта) и необходимости перенести время визита для пациентов на другой день и/или с использованием другой системы визуализации. Жесткие допуски на механическую обработку и/или на совмещение могут увеличить время изготовления и/или итоговую стоимость системы. В случае одной системы указанная гайка крепится к соединению, обеспечивающему две степени свободы, что было достаточно для компенсации неточностей при механической обработке и/или смещения, а также нежелательной горизонтальной передачи усилия, и дополнительная стоимость более усовершенствованных систем не была обоснована.
Аспекты, описываемые в данном документе, затрагивают вышеупомянутые и другие проблемы.
В одном аспекте опора для объекта системы визуализации включает в себя столешницу, которая обеспечивает поддержку субъекта или объекта в исследуемой области системы визуализации, основание, содержащее механический привод линейного перемещения, и соединение, которое механически соединяет указанные столешницу и механический привод линейного перемещения, так чтобы данный механический привод линейного перемещения перемещал столешницу относительно исследуемой области. Указанное соединение вращается в двух направлениях и перемещается в двух направлениях, тем самым обеспечивая четыре степени свободы, компенсирующие, по меньшей мере, либо неточности при механической обработке, либо смещение указанного механического привода линейного перемещения.
В другом аспекте способ включает в себя перемещение столешницы опоры для объекта системы визуализации относительно основания указанной опоры для объекта посредством соединения и механического привода линейного перемещения, причем указанное соединение прикреплено к указанной столешнице и механическому приводу линейного перемещения, который зафиксирован к указанному основанию и в котором указанное соединение обеспечивает четыре степени свободы для указанного механического привода линейного перемещения.
В другом аспекте система визуализации включает в себя источник излучения, испускающий излучение, которое пересекает исследуемую область, чувствительную к излучению детекторную решетку, которая регистрирует излучение, пересекающее исследуемую область, и опору для объекта, которая обеспечивает поддержку субъекта или объекта в исследуемой области. Указанная опора для объекта включает в себя столешницу, которая обеспечивает поддержку субъекта или объекта в исследуемой области системы визуализации, основание, содержащее механический привод линейного перемещения, и соединение, которое механически соединяет указанные столешницу и механический привод линейного перемещения, который перемещает столешницу относительно исследуемой области. Указанное соединение вращается в двух противоположных направлениях и перемещается в двух противоположных направлениях, тем самым компенсируя, по меньшей мере, либо неточности при механической обработке, либо смещение указанного механического привода линейного перемещения.
Данное изобретение может выражаться в различных компонентах и сочетаниях компонентов, а также в разнообразных этапах и сочетаниях этапов. Чертежи предназначены только для иллюстрации предпочтительных вариантов осуществления и не должны толковаться как ограничивающие данное изобретение.
Фиг. 1 схематически иллюстрирует систему визуализации, включающую опору для объекта.
Фиг. 2 иллюстрирует пример опоры для объекта.
Фиг. 3, 4, 5 и 6 иллюстрируют пример соединения опоры для объекта.
Фиг. 7 иллюстрирует способ.
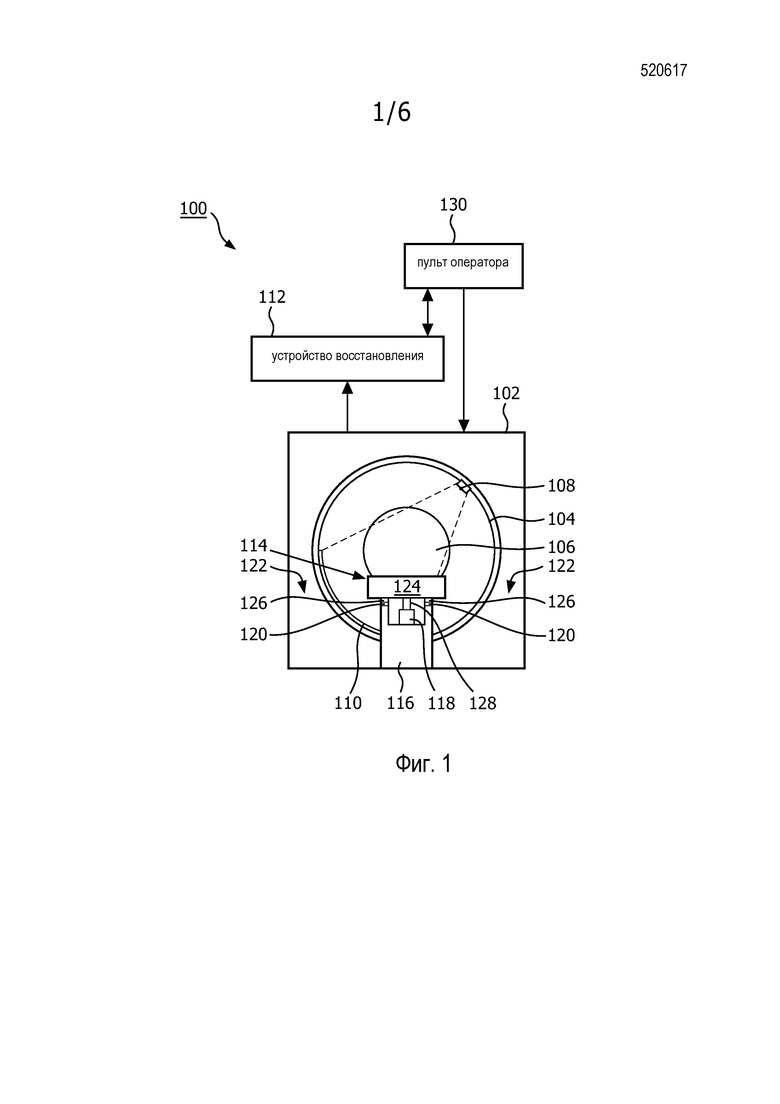
Фиг. 1 схематически иллюстрирует систему 100 визуализации. Система 100 визуализации может представлять собой КТ, ПЭТ, ОФЭКТ, МРТ, УЗ, рентгеновскую систему визуализации, их сочетание (например, КТ/ПЭТ-систему визуализации, и т.д.) и/или систему на основе другого способа медицинской визуализации. Однако ради краткости и ясности нижеследующее будет описываться в отношении компьютерного томографа.
Иллюстрируемая система 100 визуализации включает в себя в целом стационарный гентри 102 и вращающийся гентри 104, который поддерживается с возможностью вращения указанным стационарным гентри 102 и вращается по исследуемой области 106 вокруг оси z. Источник 108 излучения, такой как рентгеновская трубка, поддерживается с возможностью вращения вращающимся гентри 104, вращается вместе с указанным вращающимся гентри 104 и испускает излучение, которое проходит через исследуемую область 106. Чувствительная к излучению детекторная решетка 110 образует дугообразный изгиб, располагаясь напротив источника 108 излучения на противоположной стороне исследуемой области 106. Чувствительная к излучению детекторная решетка 110 обнаруживает излучение, пересекающее исследуемую область 106, и генерирует сигнал, указывающий излучение.
Опора 114 для объекта, такая как кушетка для пациента, обеспечивает поддержку субъекта или объекта в исследуемой области 106 до, во время и/или после сканирования. Иллюстрируемая опора 114 для объекта содержит основание 116, механический привод 118 линейного перемещения, прикрепленный к основанию 116, первые участки 120 одной или нескольких опор 122 (в данном примере изображены две), прикрепленные к основанию 116, столешницу 124, вторые участки 126 одного или нескольких опорных элементов 122, прикрепленные к столешнице 124, и соединение 128, которое соединяет указанные столешницу 124 и механический привод 118 линейного перемещения. Основание 116 крепится к или устанавливается на полу в кабинете для исследований. Механический привод 118 линейного перемещения перемещает соединение 128 и, следовательно, столешницу 124 в продольном или z-направлении внутрь и из исследуемой области.
Как описывается более подробно ниже, соединение 128 минимизирует неточности при механической обработке и/или смещение, по меньшей мере, механического привода 118 линейного перемещения посредством предоставления возможности участку соединения 128 двигаться (например, перемещаться или вращаться) с, по меньшей мере, тремя степенями свободы для компенсации неточностей при механической обработке и/или смещения, тем самым сводя к минимуму нежелательную горизонтальную передачу усилия и позволяя столешнице свободно перемещаться без лишнего усилия. В одном случае это может сократить перерывы в работе системы визуализации с целью замены либо повторного выравнивания механического привода 118 линейного перемещения. Это может также сократить время изготовления, дать возможность общих измерений усилий на всех опорах для объектов исследования и/или серий ложементов, предусматривать увеличенные допуски на механическую обработку и т.д. По меньшей мере, вышеперечисленное может быть достигнуто при обеспечении жесткой компоновки с люфтом в диапазоне 0,50 мм или меньше, например 0,25 мм или меньше, и/или, по меньшей мере, при соответствии требуемым характеристикам конфигурации опоры 114 для объекта, при которой соединение 128 не используется.
Устройство 112 восстановления восстанавливает сигнал, генерируя данные объемного изображения, указывающие на сканируемый участок субъекта или объекта, находящийся внутри исследуемой области 106. Многофункциональная вычислительная система или компьютер служит в качестве пульта 130 оператора. Пульт 130 оператора содержит удобочитаемое для человека устройство вывода, такое как монитор, и устройство ввода, такое как клавиатура, компьютерная мышь и т.д. Внутреннее программное обеспечение на пульте 130 оператора позволяет оператору взаимодействовать с и/или управлять сканирующим устройством 100 посредством графического интерфейса пользователя (ГИП) или каким-либо иным образом. В дополнение программное обеспечение дает команду опоре 114 для объекта перемещать столешницу 124 для расположения объекта и/или субъекта для загрузки и/или выгрузки и/или расположения объекта и/или субъекта до, во время и/или после сканирования, и т.д.
На Фиг. 2 изображен вид сбоку опоры 114 для объекта, включая пример механического привода 118 линейного перемещения. В данном примере, механический привод 118 линейного перемещения содержит удлиненный резьбовой вал 202 и комплементарную гайку (болт или тому подобное) 204 с резьбой. (Следует отметить, что шариковинтовая пара может быть использована в качестве альтернативы.) Указанный вал 202 фиксируется к основанию 116 концами 205 вала 202 и проходит по направлению z-оси.
Двигатель 206 функционально связан с валом 202 и вращает вал 202. Блок регулирования (не виден на чертеже) приводит двигатель 206 в действие. Соединитель 128 фиксируется к столешнице 124 и к резьбовому валу 202 и, следовательно, соединяет столешницу 124 и механический привод 118 линейного перемещения. Вращение резьбового вала 202 перемещает гайку 204 вдоль z-направления, что перемещает столешницу 124 вдоль z-направления.
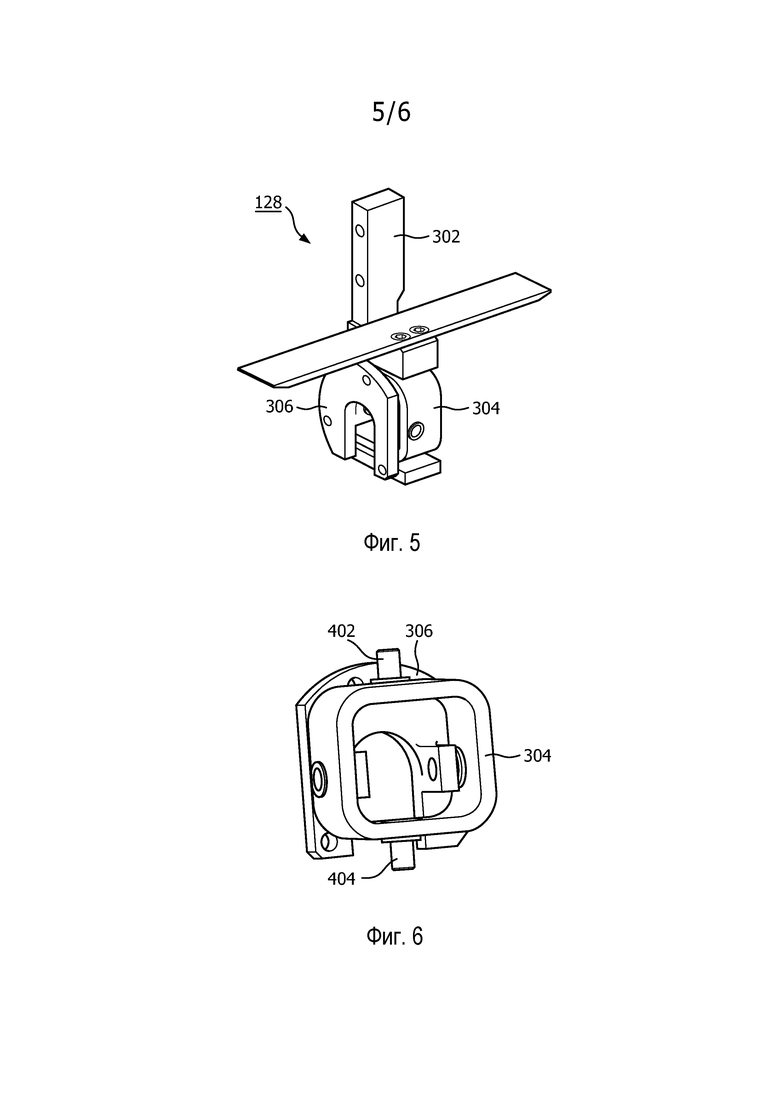
На Фиг. 3, 4, 5 и 6 изображен неограничивающий пример соединителя 128. Иллюстрируемый соединитель 128 включает в себя неподвижный каркас 302, первый подвижный элемент 304 и второй подвижный элемент 306. На Фиг. 3 изображены виды в перспективном изображении, Фиг. 5 иллюстрирует вид в перспективе сзади вида, изображенного на Фиг. 3, на Фиг. 4 изображен вид спереди, а на Фиг. 6 изображен частичный вид.
Неподвижный каркас 302 содержит элемент 308 соединения со столешницей, который прикрепляется к столешнице 124 (Фиг. 1 и 2). Неподвижный каркас 302 также содержит основную часть 310, которая обеспечивает поддержку первого подвижного элемента 304. В иллюстрируемом варианте осуществления основная часть 310 имеет «С»-образную форму по той причине, что она включает в себя по меньшей мере две противоположные стороны 312 и 314, которые обращены друг к другу. В других вариантах осуществления основная часть 310 может быть круглой, прямоугольной, восьмиугольной и/или иной формы. По меньшей мере, одна из сторон 312 и 314 содержит углубление 316 и 317 без материала.
Первый подвижный элемент 304 имеет «О»-образную форму по той причине, что он включает в себя первую пару противоположных сторон 318 и 320 и вторую пару противоположных сторон 322 и 324, которые в целом перпендикулярны первой паре. Аналогично неподвижному каркасу 302 другие формы также рассматриваются в данном документе. По меньшей мере, одна из сторон 318 и 320 содержит углубление 326 и 328 без материала, и, по меньшей мере, одна из сторон 322 и 324 содержит углубление 330 и 332 без материала.
Второй подвижный элемент 306 состоит из скобы 334 с двумя выступами 336 и 338, отходящими от основной поверхности 340 скобы 334. Аналогично неподвижному каркасу 302 и первому подвижному элементу 304 другие формы также рассматриваются в данном документе. По меньшей мере, один из выступов 336 и 338 содержит углубление 342 и 344 без материала. На Фиг. 4, второй подвижный элемент 306 установлен на гайке 204 механического привода 118 линейного перемещения.
Первый подвижный элемент 304 опирается с возможностью смещения на основную часть 310. Как изображено на Фиг. 4, в одном случае это может быть достигнуто с помощью опорных элементов 402 и 404, которые соответственно проходят внутрь углублений 316 и 326 и углублений 328 и 317. Как изображено на Фиг. 4, первый подвижный элемент 304 вращается вокруг оси 406, которая проходит между опорными элементами 402 и 404, и перемещается вдоль оси 406. Хотя первый подвижный элемент 304 изображен вращающимся в одном направлении, следует понимать, что он вращается или поворачивается возвратно-поступательно вокруг оси 406.
В одном случае опорные элементы 402 и 404 зафиксированы к первому подвижному элементу 304 и перемещаются и вращаются в пределах углублений 316 и 317 основной части 310. В другом случае опорные элементы 402 и 404 зафиксированы к основной части 310 и перемещаются и вращаются в пределах углублений 326 и 328 первого подвижного элемента 304. В третьем случае опорные элементы 402 и 404 являются незакрепленными в пределах всех углублений 316, 317, 326 и 328.
Фиг. 6 иллюстрирует опорные элементы 402 и 404, установленные в первом подвижном элементе 304, при этом неподвижный каркас 302 не показан в пояснительных целях.
Второй подвижный элемент 306 опирается с возможностью смещения на первый подвижный элемент 304. Как изображено на Фиг. 4, в одном случае это может быть достигнуто с помощью опорных элементов 408 и 410, которые соответственно проходят внутрь углублений 330 и 342 и углублений 332 и 344. Как изображено на Фиг. 4, второй подвижный элемент 306 вращается вокруг оси 412, которая проходит между опорными элементами 408 и 410, и перемещается вдоль оси 412. Следует отметить, что вращение и перемещение второго подвижного элемента являются перпендикулярными вращению и перемещению первого подвижного элемента 304.
В одном случае опорные элементы 408 и 410 зафиксированы ко второму подвижному элементу 306 и перемещаются и вращаются в пределах углублений 342 и 344 второго подвижного элемента 306. В другом случае опорные элементы 408 и 410 зафиксированы ко второму подвижному элементу 306 и перемещаются и вращаются в пределах углублений 330 и 332 первого подвижного элемента 304. В третьем случае опорные элементы 408 и 410 являются незакрепленными в пределах всех углублений 330, 332, 342 и 344.
Сочетание движений перемещения и вращения первого и второго подвижных элементов 304 и 306 относительно основной части 310, как описывается в данном документе, обеспечивает четыре степени свободы и дает возможность посредством соединения 128 смещать гайку вверх, вниз, влево, вправо и/или по диагонали, одновременно перемещая ее вдоль удлиненного резьбового вала 202, при любых неточностях при механической обработке и/или смещении указанного удлиненного резьбового вала 202.
В то же время соединение 128 устраняет связь между неточностями при механической обработке и/или смещением удлиненного резьбового вала 202 и столешницей 124. В одном случае вышеуказанное уменьшает нежелательную горизонтальную передачу усилия столешницы 124, вызванную тем, что комплементарный элемент 204 с резьбой не имеет возможности двигаться сам по себе и/или допускается передача столешнице 124 неточностей при механической обработке и/или смещения удлиненного резьбового вала 202.
Соединение 128 также уменьшает неблагоприятные воздействия, оказываемые нежелательной горизонтальной передачей усилия столешницы 124. Например, соединение 128 сокращает перерыв в работе системы визуализации из-за нежелательной горизонтальной передачи усилия и необходимость перенести время визита для пациентов по причине указанного перерыва в работе. В дополнение, соединение 128 позволяет увеличить допуски на механическую обработку (например, поскольку неточности при механической обработке могут быть скомпенсированы), что может снизить время изготовления и/или итоговую стоимость системы. Кроме того, общая горизонтальная передача усилия может поддерживаться для всех опор для объектов исследования и/или серий ложементов в отличие от конфигураций, в которых соединение 128 отсутствует.
Далее рассматриваются различные варианты.
Фиг. 4 иллюстрирует конфигурацию четырех опорных элемента (402, 404, 408 и 410). В одном варианте может использоваться единственный опорный элемент для каждого из движений перемещения и/или вращения. В другом варианте могут использоваться более четырех опорных элемента. В третьем варианте пары опорных элемента не являются перпендикулярными друг другу. В еще одном варианте, по меньшей мере, одна из пар опорных элементов расположена под углом относительно осей 406 и 412. В дальнейшем варианте соединение 128 может включать в себя один или несколько других подвижных элементов. Еще в одном варианте одно или несколько углублений могут представлять собой паз, который дает возможность опорному элементу скользить вдоль продольной оси данного паза.
Хотя варианты осуществления, описанные выше, изображают один механический привод линейного перемещения, специалист в данной области техники примет во внимание вариант, в котором используются два или несколько механических приводов линейного перемещения. Например, на Фиг. 2 изображен один механический привод линейного перемещения, находящийся с одной стороны опоры 114 для объекта. В одном из вариантов второй механический привод линейного перемещения может располагаться с другой стороны опоры 114. Фиг. 1 иллюстрирует один механический привод линейного перемещения, расположенный вдоль центральной части опоры 114 для объекта. В одном из вариантов второй механический привод линейного перемещения может находиться на одной из двух сторон, дополнительный механический привод линейного перемещения может быть расположен с каждой стороны опоры 114 для объекта, два механических привода линейного перемещения могут находиться вблизи центральной части и т.д.
В другом варианте предусматриваются только три степени свободы. Например, в одном случае соединение 128 допускает два вращательных движения, но только одно из движений перемещения. В другом варианте соединение 128 допускает два движения перемещения, но только одно из вращательных движений. В еще одном варианте соединение 128 обеспечивает более четырех степеней свободы.
Фиг. 7 иллюстрирует примерный способ.
Необходимо принять во внимание, что порядок действий не ограничивается. В связи с этим другой порядок также рассматривается в данном документе. В дополнение одно или несколько действий могут быть исключены и/или одно или несколько дополнительных действий могут быть добавлены.
На этапе 702 субъект или предмет для исследования загружается на столешницу опоры для объекта системы визуализации.
На этапе 704 столешница приводится в действие для перемещения вдоль основания опоры для объекта с целью размещения субъекта или объекта для исследования в исследуемой области системы визуализации.
На этапе 706 столешница перемещается, соединение, которое соединяет столешницу с механическим приводом линейного перемещения, зафиксированным к основанию опоры для объекта, компенсирует неточности при механической обработке и/или смещение механического привода линейного перемещения.
Как описывается в данном документе, это может быть достигнуто с помощью конфигурации соединения, которое допускает три или более степени свободы для гайки механического привода линейного перемещения, так что указанная гайка может перемещаться и/или вращаться при наличии неточностей при механической обработке и/или смещения.
Данное изобретение было описано со ссылкой на предпочтительные варианты осуществления. Модификации и изменения могут быть внесены другими при прочтении и изучении предшествующего подробного описания. Предполагается, что данное изобретение будет выполнено как включающее в себя все указанные модификации и изменения постольку, поскольку они подпадают под объем прилагаемых пунктов формулы изобретения либо их эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПРЕДЕЛЕНИЕ ПРОФИЛЯ СУБЪЕКТА С ПОМОЩЬЮ КАМЕРЫ | 2018 |
|
RU2777943C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ С МНОЖЕСТВОМ СРЕДСТВ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ | 2013 |
|
RU2629801C2 |
| МЕХАНИЗМ ПОЗИЦИОНИРОВАНИЯ ВЫСОКОИНТЕНСИВНОГО ФОКУСИРОВАННОГО УЛЬТРАЗВУКА | 2010 |
|
RU2549996C2 |
| ИДЕНТИФИКАТОР ПОЛОЖЕНИЯ НАЧАЛА И/ИЛИ КОНЦА СКАНИРОВАНИЯ | 2011 |
|
RU2570958C2 |
| МОДУЛЬНАЯ ASIC ДЕТЕКТОРА ВИЗУАЛИЗАЦИИ | 2015 |
|
RU2686867C2 |
| КАЧАТЕЛЬНАЯ ОПОРА ГАНТРИ ДЛЯ СИСТЕМ ВИЗУАЛИЗАЦИИ | 2012 |
|
RU2597132C2 |
| СКАНИРОВАНИЕ В СКВОЗНОМ РЕЖИМЕ | 2007 |
|
RU2452384C2 |
| ОТСЛЕЖИВАНИЕ ДВИЖЕНИЯ В МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ С ИСПОЛЬЗОВАНИЕМ РАДАРА И СИСТЕМЫ ДЕТЕКТИРОВАНИЯ ДВИЖЕНИЯ | 2019 |
|
RU2784922C2 |
| СОКРАТИТЕЛЬ РЕНТГЕНОВСКОГО ПОТОКА ДЛЯ ДЕТЕКТОРА ПОДСЧЕТА ФОТОНОВ | 2015 |
|
RU2699280C2 |
| ВЫДАЧНОЕ УСТРОЙСТВО ДЛЯ ПРОДУКТОВ И ПОКРЫВАЮЩИЙ ЭЛЕМЕНТ ДЛЯ ВЫДАЧНОГО УСТРОЙСТВА | 2012 |
|
RU2577730C2 |




Изобретение относится к медицинской технике, а именно к средствам для визуализации. Опора для объекта системы визуализации включает в себя столешницу, обеспечивающую поддержку субъекта или объекта исследуемой области системы визуализации, основание, содержащее механический привод линейного перемещения и соединение, механически соединяющее указанные столешницу и механический привод линейного перемещения так, что данный механический привод линейного перемещения перемещает столешницу в направлении оси z внутрь и из исследуемой области, причем указанное соединение вращается в двух направлениях и перемещается в одном направлении, причем указанные два вращательные направления и одно направление перемещения являются поперечными к направлению оси z, или вращается в одном направлении и перемещается в двух направлениях, причем указанные одно вращательное направление и два направления перемещения являются поперечными к направлению оси z, тем самым обеспечивая, по меньшей мере, три степени свободы, давая возможность указанному соединению перемещаться и/или вращаться при наличии неточностей при механической обработке и/или смещении, компенсируя, по меньшей мере, либо указанные неточности при механической обработке, либо указанное смещение механического привода линейного перемещения. Способ перемещения столешницы опоры для объекта системы визуализации включает в себя перемещение столешницы опоры для объекта системы визуализации относительно основания указанной опоры для объекта посредством соединения и механического привода линейного перемещения. Использование группы изобретений позволяет компенсировать неточности при смещении механического привода линейного перемещения. 2 н. и 13 з.п. ф-лы, 7 ил. 
1. Опора (114) для объекта системы (100) визуализации, включающая в себя:
столешницу (124), которая обеспечивает поддержку субъекта или объекта в исследуемой области системы визуализации;
основание (116), содержащее механический привод (118) линейного перемещения; и
соединение (128), которое механически соединяет указанные столешницу и механический привод линейного перемещения, так что данный механический привод линейного перемещения перемещает столешницу в направлении оси z внутрь и из исследуемой области,
причем указанное соединение вращается в двух направлениях и перемещается в одном направлении, причем указанные два вращательные направления и одно направление перемещения являются поперечными к направлению оси z, или вращается в одном направлении и перемещается в двух направлениях, причем указанные одно вращательное направление и два направления перемещения являются поперечными к направлению оси z, тем самым обеспечивая, по меньшей мере, три степени свободы, давая возможность указанному соединению перемещаться и/или вращаться при наличии неточностей при механической обработке и/или смещения, компенсируя, по меньшей мере, либо указанные неточности при механической обработке, либо указанное смещение механического привода линейного перемещения.
2. Опора для объекта по п. 1, в которой указанное соединение вращается в двух направлениях и перемещается в двух направлениях, тем самым обеспечивая, по меньшей мере, три степени свободы.
3. Опора для объекта по п. 1 или 2, в которой механический привод линейного перемещения содержит винт с резьбой и комплементарную гайку с резьбой, причем указанный винт зафиксирован к основанию, гайка зафиксирована к соединению, которое прикреплено к столешнице, и указанная гайка перемещается вдоль указанного винта в ответ на управляемое вращательное движение данного винта, тем самым перемещая столешницу.
4. Опора для объекта по п. 3, в которой соединение содержит:
первый подвижный элемент (304),
второй подвижный элемент (306), который прикрепляется к гайке с резьбой, в котором первый подвижный элемент поддерживает второй подвижный элемент с возможностью вращения и смещения; и
неподвижный каркас (302), включающий в себя:
элемент (308) соединения со столешницей, который прикрепляется к указанной столешнице; и
основную часть (310), в которой указанная основная часть обеспечивает поддержку первого подвижного элемента с возможностью вращения и смещения.
5. Опора для объекта по п. 4, в которой первый подвижный элемент перемещается в первом линейном направлении и второй подвижный элемент перемещается во втором линейном направлении и первое и второе линейные направления перпендикулярны друг другу.
6. Опора для объекта по п. 5, дополнительно включающая в себя:
по меньшей мере, один опорный элемент (402, 404), в котором первый подвижный элемент соединен с основной частью посредством указанного, по меньшей мере, одного опорного элемента и первый подвижный элемент перемещается посредством указанного, по меньшей мере, одного опорного элемента.
7. Опора для объекта по п. 6, в которой основная часть включает в себя, по меньшей мере, две противоположные стороны (312, 314) с соответствующими углублениями (316, 317), первый подвижный элемент включает в себя, по меньшей мере, две противоположные стороны (318, 320) с соответствующими углублениями (330, 332), по меньшей мере, один опорный элемент предусматривает два опорных элемента и один из указанных опорных элементов проходит внутрь одного из углублений сторон основной части и одного из углублений сторон первого подвижного элемента, а другой из указанных опорных элементов проходит внутрь другого из углублений сторон основной части и другого из углублений сторон первого подвижного элемента.
8. Опора для объекта по любому из пп. 4-7, в которой первый подвижный элемент вращается в первом направлении вращения, и
второй подвижный элемент вращается во втором направлении вращения, и первое и второе направления вращения перпендикулярны друг другу.
9. Опора для объекта по п. 8, дополнительно включающая в себя:
по меньшей мере, один второй опорный элемент (408, 410), в котором второй подвижный элемент соединен с первым подвижным элементом посредством указанного, по меньшей мере, одного второго опорного элемента и второй подвижный элемент вращается посредством указанного, по меньшей мере, одного второго опорного элемента.
10. Опора для объекта по п. 9, в которой основная часть включает в себя вторую пару из, по меньшей мере, двух противоположных сторон (322, 324) с соответствующими углублениями (330, 332), второй подвижный элемент включает в себя, по меньшей мере, два выступа (336, 338) с соответствующими углублениями (342, 344), по меньшей мере, один опорный элемент предусматривает два опорных элемента и один из указанных опорных элементов проходит внутрь одного из углублений сторон основной части и одного из углублений сторон указанных выступов, а другой из указанных опорных элементов проходит внутрь другого из углублений сторон основной части и другого из углублений сторон указанных выступов.
11. Опора для объекта по любому из пп. 1, 2, 4-7, в которой опора для объекта содержит только один механический привод линейного перемещения, находящийся с одной стороны или в центральной части опоры для объекта.
12. Опора для объекта по любому из пп. 1, 2, 4-7, в которой опора для объекта содержит два или несколько механических приводов линейного перемещения и соответствующие соединения.
13. Опора для объекта по любому из пп. 1, 2, 4-7, в которой соединение устраняет связь между неточностями при механической обработке и/или смещением механического привода линейного перемещения и столешницей.
14. Опора для объекта по любому из пп. 1, 2, 4-7, дополнительно включающая в себя:
опорный элемент (122) линейного скольжения, в котором столешница перемещается относительно основания посредством указанного опорного элемента линейного скольжения.
15. Способ перемещения столешницы опоры для объекта системы визуализации, включающий в себя:
перемещение столешницы (124) опоры для объекта системы визуализации относительно основания (116) указанной опоры для объекта посредством соединения (128) и механического привода (118) линейного перемещения, причем указанное соединение прикреплено к указанной столешнице и гайке (204) с резьбой механического привода (118) линейного перемещения, выполненной с возможностью перемещения вдоль удлиненного резьбового вала (202) механического привода (118) линейного перемещения, который зафиксирован к указанному основанию и указанное соединение обеспечивает возможность трех или более степеней свободы для указанного механического привода линейного перемещения в отношении указанной гайки с резьбой, так что гайка с резьбой может перемещаться и/или вращаться при наличии неточностей при механической обработке и/или смещения, что компенсирует, по меньшей мере, либо указанные неточности при механической обработке, либо указанное смещение механического привода линейного перемещения.
| US 6095685 A, 01.08.2000 | |||
| JP H10222228 A, 21.08.1998 | |||
| JP 2010131199 A, 17.06.2010 | |||
| US 5689994 A, 25.11.1997 | |||
| US 2012045038 A1, 23.02.2012 | |||
| RU 94006636 A1, 20.03.1997. |

