Изобретение относится к морской технике и предназначено для вертикального перемещения измерительных подводных аппаратов, предназначенных для измерения параметров подводной среды.
Автономные подводные аппараты (станции), ориентированные для работы на глубинах, как правило, представляют собой прочный корпус-носитель аппаратуры, рассчитанный на определенное гидростатическое давление и соответственно предельную рабочую глубину. Внутри корпуса располагается [1] электронная аппаратура, источники электропитания и измерительные преобразователи. Полностью укомплектованная автономная станция должна иметь положительную плавучесть, а погружение осуществляется за счет теряемого балластного груза, закрепляемого к управляемому размыкателю балласта. Однако автономные гидрофизические станции имеют один существенный недостаток: их измерительная аппаратура позволяет контролировать только параметры придонных вод и отсутствие возможности оперативной передачи данных. Устранить этот недостаток можно, снабжая автономную станцию [2] «гирляндой» измерительных модулей (ИМ). В состав ИМ могут входить датчики давления, температур, акустические приемники и т.д.
Недостатком таких классов станции являются измерение параметров только на фиксированных глубинах водной среды.
Автономные подводные аппараты могут производить измерения параметров с использованием механизмов типа подводных лебедок. Эти подводные аппараты затрачивают значительные энергетические ресурсы на преодоление лебедкой положительной плавучести аппаратов при погружении и сдерживания положительной плавучести при всплытии с заданной скоростью.
В работах [3, 4] устранены вышерассмотренные недостатки автономных аппаратов, предназначенных для проведения гидрофизического и экологического мониторинга с возможностью оперативной передачи данных в шельфовой зоне в районе работ нефтегазовых добычных и буровых вышек. Автономная гидрофизическая станция вертикального профилирования (АГС ВП) состоит из четырех основных частей: измерительного модуля, донной лебедки, донного блока и поплавка, соединенных между собой тросом.
Измерительный модуль предназначен для управления работой станции в соответствии с заложенной программой, проведения измерений в вертикальном слое водной среды и оперативной передачи данных по радиоканалу (спутниковому каналу). Для этого в его составе имеются управляющий процессор, измерительные датчики, УКВ или спутниковый радиомодем, гидроакустическая система связи с лебедкой и система жизнеобеспечения.
Измерительный аппаратурный модуль перемешается по вертикали с помощью лебедки, которая получает от него соответствующие команды. В состав донной лебедки входят двигатель с обводным барабаном, блок питания и гидроакустическая система связи с измерительным модулем. Блок питания играет также роль балласта. Через обводной барабан лебедки и через донный блок проходит трос, соединяющий измерительный модуль с поплавком. Поплавок служит для уравновешивания положительной плавучести измерительного модуля и имеет такую же положительную плавучесть. При такой схеме отсутствует необходимость преодолевать положительную плавучесть измерительного модуля в моменты его погружения. Энергия при перемещении модуля по вертикали тратится практически только на преодоление лобового гидродинамического сопротивления воды, поэтому поплавку и измерительному модулю придана обтекаемая форма. Такой способ перемещения в вертикальной плоскости станции имеет определенные преимущества по сравнения с классическим применением лебедок. Основное преимущество связано с нейтрализацией положительной плавучести станции поплавком. Однако такая система имеет недостаток, связанный с большой длиной троса, что может привести к захлестыванию троса.
Предлагаемая подводная лебедка использует положительную плавучесть станции, при всплытии с заданной скоростью используя механизм свободного хода лебедки. Подводная лебедка предназначена для аппаратов (станции) при выполнении измерительных работ в вертикальной плоскости водной среды. Подводная лебедка закрепляется за нижнее основание подводного аппарата (станции), свободный конец троса крепится к балласту. Подводный аппарат при каждом всплытии на поверхность моря после завершения цикла измерений вертикальной плоскости производит передачу полученной информации по радиоканалу, затем по программе или по радиокоманде выполняет следующий цикл работ, например измерения в вертикальной плоскости при погружении и всплытии станции. После завершения работ производится выборка станции с лебедкой и балластом.
Конструктивно устройство вертикального перемещения подводных аппаратов представляет собой лебедку, состоящую из мотор-редуктора с механизмом свободного хода, заключенную в герметичный корпус и включающую барабан, каркас и тросоукладчик. Крутящий момент к барабану лебедки через герметичный корпус передается с помощью магнитной муфты. Основными отличиями данной лебедки являются механизм свободного хода, предназначенный для свободного всплытия с целью предотвращения запутывания троса, и конструкция тросоукладчика.
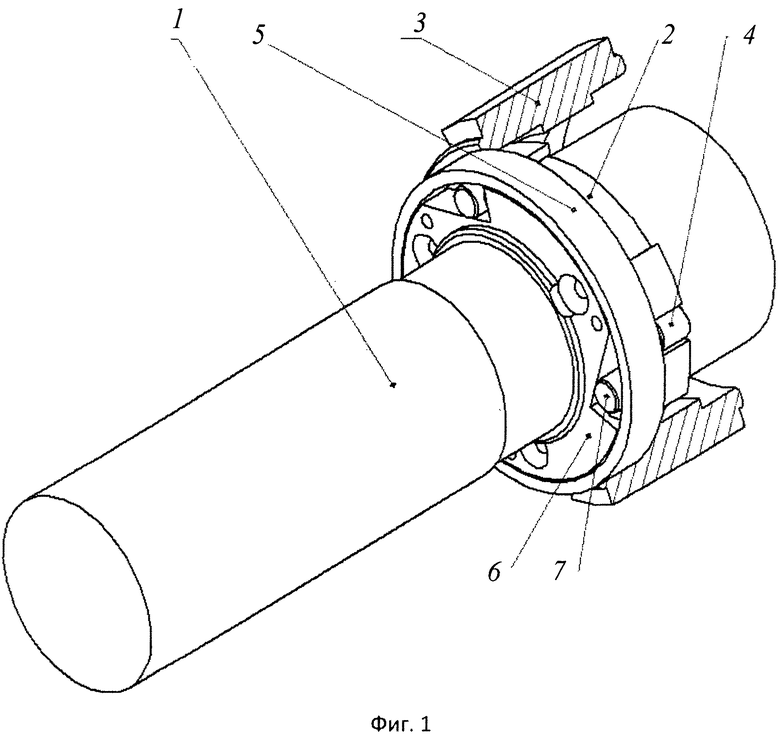
Механизм свободного хода представлен на фиг.1 и представляет собой систему, состоящую из двух связанных между собой муфт (основной и вспомогательной). Выходной вал мотор-редуктора 1 соединен с внутренней полумуфтой 2 основной обгонной муфты, а на внешней полумуфте 3 закреплены магниты для передачи крутящего момента через герметичный экран на барабан лебедки. Блокирующими элементами основной обгонной муфты служат ролики 4, расположенные в пазах полумуфты 5 вспомогательной муфты, ответная часть 6 которой жестко связана с корпусом мотор-редуктора. Работа механизма свободного хода происходит следующим образом. При вращении мотор-редуктора в направлении намотки троса на барабан, ролики основной обгонной муфты перемещаются в узкую часть паза, заклиниваются и передают вращение на барабан лебедки для намотки троса. При этом полумуфта вспомогательной обгонной муфты свободно вращается вместе с роликами основной муфты. При остановке вращения ролики основной обгонной муфты продолжают оставаться в заклиненном состоянии, и барабан лебедки останавливается. Для свободной размотки троса выходной вал мотор-редуктора в течение короткого времени вращается в противоположную сторону. При этом ролики 7 вспомогательной обгонной муфты, перемещаясь в узкую часть паза, блокируется, останавливая ролики основной обгонной муфты, и они, перемещаясь в широкую часть паза, блокируются, останавливая ролики основной обгонной муфты, и они, перемещаясь в широкую часть паза, разблокируют муфту, и барабан лебедки свободно вращается. Отличие данной конструкции от существующих заключается в управлении механизма свободного хода без вспомогательных механизмов, только путем кратковременной смены направления вращения выходного вала мотор-редуктора. Тросоукладчик, представленный на фиг.2, служит для равномерной намотки троса на барабан и состоит из направляющей каретки 8, вала с замкнутой двухсторонней винтовой канавкой 9, зубчатого колеса 10 с радиальными пазами и зубьями для фиксатора 11, шатуна 12 и кривошипа 13. Известно множество конструкций механизма, сообщающего возвратно-поступательное движение направляющей каретки тросоукладчика. Все они представляют собой многоступенчатые зубчатые редукторы, передающие вращение валу, с которого перемещается каретка тросоукладчика. Основной идеей механизма тросоукладчика является замена непрерывного возвратно-поступательного движения направляющей каретки дискретным перемещением на шаг, равный диаметру троса на один оборот барабана, с целью упрощения конструкции и повышения надежности при работе в агрессивной водной среде. Принцип работы данного устройства следующий: при работе лебедки, кривошип, связанный с барабаном, вращает один конец шатуна, а прорезь второго конца перемещается по валу с винтовым пазом. При этом параметры кривошипно-ползунного механизма подобраны таким образом, что зуб, закрепленный на шатуне, входит в радиальный паз зубчатого колеса, вращает зубчатое колесо на один шаг и выходит из паза. Подпружиненный стопор фиксирует зубчатое колесо в новом положении. Таким образом, при вращении барабана лебедки происходит дискретное вращение зубчатого колеса и связанного с ним вала с винтовым пазом. При смене направления вращения все происходит также, только в противоположную сторону. Вращающийся ролик, входящий в винтовой паз, и закрепленный на каретке тросоукладчика, перемещает ее по направляющим. При дискретном перемещении каретки тросоукладчика равномерность намотки троса на барабан удовлетворительная, что подтверждено испытаниями опытного образца. Дополнительным преимуществом данной конструкции является возможность изменения шага укладки троса при изменении его диаметра только путем замены зубчатого колеса с другим количеством пазов и зубьев, изменением радиуса кривошипа и расположением зуба на шатуне.
ЛИТЕРАТУРА
1. Малашенко А.Е., Филимонов В.И., Перунов В.В., Рожков B.C. Многофункциональная гидрофизическая автономная станция. Патент на ПМ №50299, 24.06.2005 г.
2. Малашенко А.Е., Перунов В.В., Филимонов В.И., Рожков B.C. Автономная гидрофизическая станция для зондирования параметров водной среды на нескольких фиксированных глубинах. Патент на ПМ №56593, 25.10.2005 г.
3. Перунов В.В., Малашенко А.Е. Циклическая автономная гидрофизическая станция вертикального профилирования. Патент №2406640, 16.04.2009 г.
4. Малашенко А.Е., Перунов В.В., Ким Мен себ., Белов Владимир Ильич. Автономная гидрофизическая станция вертикального профилирования. Патент №2406639, 16.04.2009 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИКЛИЧЕСКАЯ АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406640C1 |
| Подводный лебедочный зонд | 2017 |
|
RU2642677C1 |
| АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406639C1 |
| ПРОФИЛОГРАФ ДЛЯ ВЕРТИКАЛЬНОГО ЗОНДИРОВАНИЯ МОРСКОЙ СРЕДЫ | 2012 |
|
RU2499280C2 |
| БУЙКОВАЯ СТАНЦИЯ ДЛЯ ГИДРОФИЗИЧЕСКИХ ИЗМЕРЕНИЙ | 1995 |
|
RU2090431C1 |
| Автономная гидрофизическая станция | 2021 |
|
RU2783188C1 |
| УСТРОЙСТВО ДЛЯ ЦИКЛИЧЕСКОГО ПОГРУЖЕНИЯ И ВСПЛЫТИЯ МОРСКОГО БУЯ | 2019 |
|
RU2733550C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2013 |
|
RU2546784C2 |
| УСТРОЙСТВО ДЛЯ ЦИКЛИЧЕСКОГО ПОГРУЖЕНИЯ И ВСПЛЫТИЯ МОРСКОГО БУЯ | 2018 |
|
RU2701293C1 |
| ЗОНДИРУЮЩИЙ КОМПЛЕКС | 2023 |
|
RU2828192C1 |
Изобретение относится к устройству вертикального перемещения подводных аппаратов. Устройство вертикального перемещения состоит из лебедки с мотор-редуктором, заключенной в герметичный корпус. Крутящий момент передается к барабану лебедки через герметичный корпус с помощью магнитной муфты. Лебедка дополнена механизмом свободного хода с целью предотвращения запутывания троса при свободном всплытии подводного аппарата и перемещения с заданной скоростью. Достигается повышение надежности устройства. 2 ил.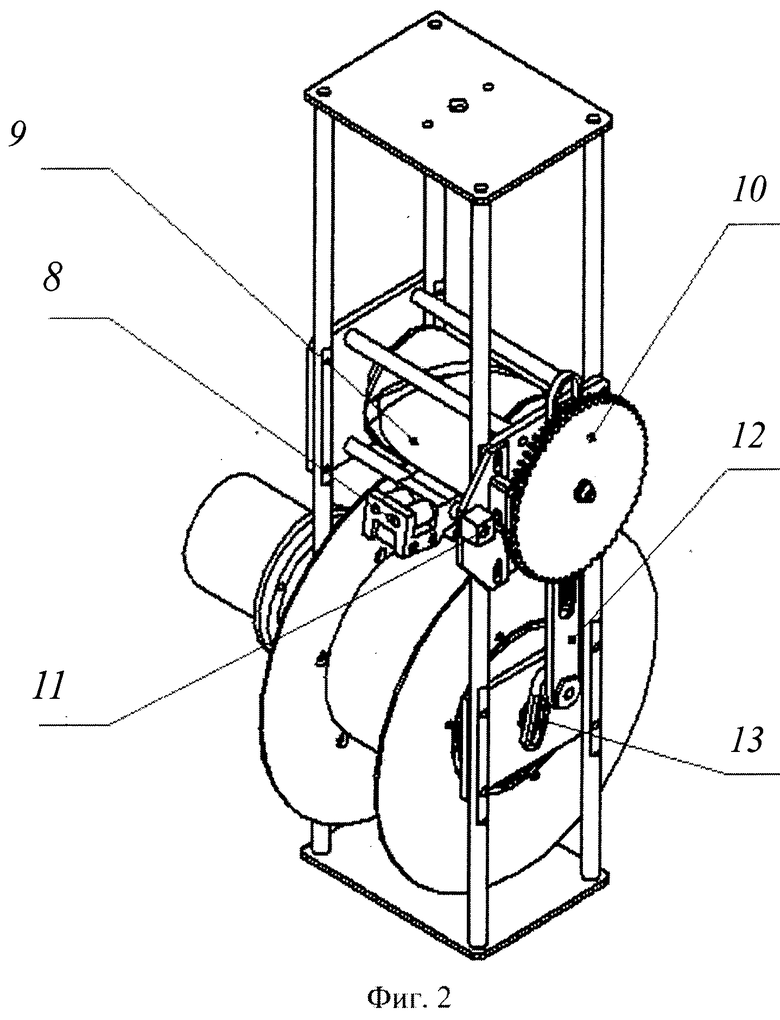
Устройство вертикального перемещения подводных аппаратов, состоящее из лебедки с мотор-редуктором, заключенной в герметичный корпус, крутящий момент которой передается к барабану лебедки через герметичный корпус с помощью магнитной муфты, отличающееся тем, что лебедка дополнена механизмом свободного хода с целью предотвращения запутывания троса при свободном всплытии подводного аппарата и перемещения с заданной скоростью.
| АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406639C1 |
| ЦИКЛИЧЕСКАЯ АВТОНОМНАЯ ГИДРОФИЗИЧЕСКАЯ СТАНЦИЯ ВЕРТИКАЛЬНОГО ПРОФИЛИРОВАНИЯ | 2009 |
|
RU2406640C1 |
| Судовое подъемно-опускное устройство для подводной исследовательской аппаратуры | 1981 |
|
SU988650A1 |
| US 3968954 A, 13.07.1976 | |||

