Изобретение относится к области лазерной техники и может быть использовано для проведения эффективной процедуры автоматизированной юстировки (автоюстировки) сложных оптических систем, в том числе при наличии существенных аберраций.
Необходимость автоюстировки оптических систем возникает, в частности, при эксплуатации современных мощных многоканальных лазерных установок для изучения проблемы лазерного термоядерного синтеза. На данный момент в мире существуют две такие установки мегаджоульного уровня выходной энергии излучения - это установка NIF (США) [R.A. Zacharias, N.R. Beer, E.S. Bliss et al., "Alignment and wavefront control systems of the National Ignition Facility", Optical Engineering 43, 12 (2004), 2873-2884. 1] и установка LMJ (Франция) [L. Hilsz, S. Challois, F. Nicaise, M. Luttmann, A. Adolf, "Redesign of the image processing techniques used for the alignment of the LMJ Amplifier Section" Proc. of SPIE 7797, (2010), 77970A-1-77970A-14. 2]. Российским аналогом этих лазеров является находящаяся в настоящее время на стадии проектирования установка УФЛ-2М [S.A. Bel′kov, S.G. Garanin, "Concept of megajoule laser driver for ICF": Technical program // 15-th International Conference on Laser Optics «LO-2012». St. Petersburg, Russia, June 25-29, 2012. P.48. 3]. Решение задачи автоюстировки на этих установках особенно проблематично в силу их сложности, многоканальности, большого количества оптических элементов, протяженности оптического тракта. Кроме того, лазерное излучение, проходящее через оптические схемы данных установок, заметно искажается (приобретает аберрации), что вносит дополнительные трудности в задачу автоюстировки.
Актуальность технического решения проблемы автоюстировки оптических систем, в частности, может быть продемонстрирована при осуществлении автоюстировки усилительного канала установки УФЛ-2М [3]. Это лазер на неодимовом стекле, включающий 192 канала. Усилительный канал представляет собой зеркально-линзовую систему с активной средой и двумя пространственными фильтрами, на вход которой подается пучок излучения от задающего генератора. В усилительном канале реализуется 4-проходная схема усиления. С течением времени под воздействием целого ряда факторов оптические и механические элементы усилительного канала могут разъюстироваться, что приводит к изменению направления распространения и центрирования пучка в канале и на выходе системы. Опыт показывает, что практически перед каждым выстрелом лазера для его эффективной работы требуется юстировка усилительного канала. Задача, решаемая юстировкой, заключается в принудительном повороте и/или сдвиге ряда оптических и механических элементов канала с целью обеспечить необходимое направление распространения лазерного пучка в системе пространственных фильтров и активной среде и его заданное положение и направление распространения на выходе. Очевидно, что юстировка лазера должна быть автоматизирована как в связи с достаточно сложной оптической схемой канала, так и в связи с большим количеством каналов.
Схема усилительного канала установки УФЛ-2М близка к схеме усилительного канала установки LMJ, поэтому в качестве прообраза, реализующего заявляемый способ системы автоюстировки усилительного канала установки УФЛ-2М, была выбрана система автоюстировки усилительного канала установки LMJ [2], основанная на подходе, который можно условно назвать «маркерным». Способ автоюстировки (способ-прототип), реализуемый в схеме установки LMJ, состоит в контроле взаимного положения лазерного пучка и элементов оптической системы путем получения изображений юстировочного лазерного пучка и маркеров элементов оптической системы в ближней и дальней зонах, определении положения оптической оси системы, последующей обработке полученных изображений с целью вычисления управляющих сигналов и обеспечении управления контрольными оптическими элементами посредством подачи на приводы исполнительных механизмов этих сигналов.
К недостаткам способа автоюстировки оптической системы усилительного канала установки LMJ можно отнести детерминированность алгоритма управления контрольными оптическими элементами и высокую чувствительность результата автоюстировки к точности измерения и стабильности функций отклика исполнительных элементов, что при большом количестве каналов установки трудно обеспечить. Кроме того, идентификация пар маркеров требует проведения сложной предварительной обработки изображений маркеров и юстировочного пучка (адаптивной морфологической фильтрации для выделения малых или неинтенсивных пятен из фонового шума, классификации пятен). То есть в процессе юстировки требуется предварительный анализ и сложная обработка изображений. Указанная проблема усугубляется при наличии существенных оптических аберраций, которые всегда присутствуют при прохождении излучением тракта мощных лазерных установок.
Для того чтобы охарактеризовать технический уровень заявляемого решения, следует отметить, что задача автоюстировки оптических систем на основе «маркерного» метода решалась и в России. В ходе разработки системы автоюстировки усилительного канала установки «Искра-6» были предложены метод и алгоритм работы юстировочного модуля [И.А. Бубнов, С.Г. Гаранин, С.В. Григорович и др., «Методы и алгоритм работы юстировочного модуля многопучковой лазерной установки «Искра-6», Оптический журнал, том 73, №1, (2006), 22-28, 4]. Оптическая схема исследованного модуля являлась уменьшенной частью схемы усилительного канала, и в ней моделировалось распространение пучка на третьем и четвертом проходах. Одним из недостатков примененного алгоритма является то, что он так же, как и алгоритм в [2], построен на детерминированном подходе. Кроме того, отработка данного метода проводилась на стенде без моделирования оптических аберраций, характерных для активных элементов усилителей на мощных лазерных установках. С точки зрения соответствия оптических систем усилительных каналов в качестве прототипа заявляемого способа целесообразно использовать [2].
Технический результат изобретения по сравнению с прототипом [2] заключается в упрощении и повышении надежности процедуры автоматизированной юстировки оптической системы.
Технический результат достижим за счет того, что в отличие от известного способа автоматизированной юстировки оптической системы, заключающегося в контроле взаимного положения лазерного пучка и элементов оптической системы путем получения изображений юстировочного лазерного пучка и маркеров элементов оптической системы в ближней и дальней зонах, определении положения оптической оси системы, последующей обработке полученных изображений с целью вычисления управляющих сигналов и обеспечении управления контрольными оптическими элементами посредством подачи на приводы исполнительных механизмов этих сигналов, в предложенном способе осуществляют случайный наклон контрольных оптических элементов, контролируют изменение положения изображений маркеров и юстировочного лазерного пучка путем вычисления отклонения центра масс этих изображений от положения оптической оси системы, вычисляют поправки для управляющих сигналов, корректируют положение контрольных элементов посредством подачи этих управляющих сигналов на приводы исполнительных механизмов, причем осуществляют итерационный режим управления контрольными оптическими элементами, основанный на том, что для вычисления управляющих сигналов используют стохастический параллельный градиентный (СПГ) алгоритм, при этом целевая функция, применяемая в СПГ алгоритме, зависит от отклонения центров масс изображений от предварительно определенного положения оптической оси системы; параметр, контролирующий темп сходимости СПГ алгоритма, определяется текущим значением отклонения центра масс изображения от положения оптической оси; результатом работы СПГ алгоритма является минимизация отклонения от положения оптической оси центров масс изображений. При необходимости увеличения точности юстировки поводят идентификацию пар маркеров, причем эта процедура существенно упрощается по сравнению с процедурой идентификации пар маркеров, применяемой в прототипе, за счет проведенной в процессе юстировки симметризации изображений маркеров в результате работы СПГ алгоритма.
В основу предложенного технического решения заложен «маркерный» метод юстировки оптической системы (силового канала), в частности, 4-проходной лазерной установки LMJ. «Маркерный» метод, лежащий в основе автоюстировки усилительного канала LMJ, основан на видеоконтроле с помощью CCD-камер взаимного положения центра юстировочного пучка, центров оптических элементов (торцевых зеркал) в ближней зоне и центров диафрагм пространственных фильтров в дальней зоне. Центр оптического элемента при этом определяется по двум световым маркерам (волоконные лазерные источники): они располагаются в плоскости элемента, по обе стороны от центра и на одинаковом от него расстоянии. Центры диафрагм пространственных фильтров определяются аналогично: два световых маркера устанавливаются на одинаковом расстоянии от центра соответствующей диафрагмы в поперечном направлении. Юстировка каждого канала производится с помощью датчика, на который поступает излучение маркеров и юстировочного пучка путем его ответвления после четвертого прохода из транспортного пространственного фильтра. Датчик позволяет получать изображения пучка и маркеров в ближней и дальней зонах. Таким образом, в части, касающейся контроля взаимного положения лазерного пучка и элементов оптической системы, в заявляемом способе подход аналогичен.
Особенность и преимущества заявляемого решения по сравнению с решением, принятым в прототипе, заключаются в том, что:
- осуществляют случайный наклон контрольных оптических элементов, контролируют изменение положения изображений маркеров и юстировочного лазерного пучка путем вычисления отклонения центра масс этих изображений от положения оптической оси системы, вычисляют поправки для управляющих сигналов, корректируют положение контрольных элементов посредством подачи этих управляющих сигналов на приводы исполнительных механизмов;
- исключена сложная процедура обработки полученных при юстировке изображений маркеров и юстировочного лазерного пучка, характерная для прототипа - при проведении юстировки определяют положение центров масс регистрируемых изображений маркеров и юстировочного лазерного пучка без предварительной классификации пятен;
- управление оптическими элементами посредством управляющих сигналов организовано с помощью двухэтапного СПГ алгоритма [Гаранин С.Г., Маначинский А.Н., Стариков Ф.А., Хохлов С.В. Фазовая коррекция лазерного излучения с помощью адаптивных оптических систем в РФЯЦ-ВНИИЭФ // Автометрия. 2012. Том 48. №2.
С.30-37], который построен на основе трехэтапного метода стохастического градиентного спуска [М.А. Vorontsov, V.P. Sivokon, "Stochastic parallel-gradient-descent technique for hight-resolution wave-front phase-distortion correction", J. Opt. Soc. Amer., V.15, №10, (1998), 2745-2758] и который находит применение и в других задачах, например, для управления адаптивными оптическими элементами с целью компенсации фазовых искажений пучка;
- отсутствие необходимости в точном определении функций отклика контрольных элементов;
- нечувствительность к неизбежной деградации и/или изменению характеристик шаговых двигателей в процессе длительной эксплуатации;
- отсутствие или (при наличии необходимости) упрощение процедуры идентификации пар световых маркеров, что является существенной проблемой при наличии оптических неоднородностей в тракте и значительной исходной разъюстировке;
- отсутствие необходимости дополнительной коррекции алгоритма управления при небольших изменениях параметров оптической схемы.
Таким образом, использующий вышеназванные преимущества способ автоматизированной юстировки оптической системы на основе СПГ алгоритма позволит по сравнению с прототипом обеспечить более простую и надежную процедуру юстировки в автоматизированном режиме за несколько итераций.
Техническое решение реализовано в численной модели оптической системы усилительного канала установки УФЛ-2М. Функциональная схема системы автоюстировки силового канала приведена на рис.1, где 1 - зеркало, 2 - маркеры ближней зоны, 3 - усилитель, 4 - кюветный пространственный фильтр (КПФ), 5 - диафрагменный узел КПФ и маркеры дальней зоны, 6 - транспортный пространственный фильтр (ТПФ), 7 - диафрагменный узел ТПФ и маркеры дальней зоны, 8 - реверсер, 9 - зеркало, 10 - зеркало, 11 - зеркало, 12 - система формирования опорного излучения (СФОИ), 13 - юстировочный лазер, 14 - датчик СФОИ, 15 - датчик силового канала, 16 - изображение ближней зоны, 17 - изображение дальней зоны, 18 - зеркало.
Покажем, каким образом достигается указанный выше технический результат. При юстировке усилительного канала контролируют в дальней зоне положение юстировочного пучка на двух диафрагмах узла ТПФ 6 и двух диафрагмах узла КПФ 4, а в ближнем поле - на торцевом зеркале 1. Все перечисленные оптические элементы оснащены парами световых маркеров. Для контроля взаимного положения лазерного пучка и элементов оптической системы получают изображение юстировочного лазерного пучка и маркеров элементов оптической системы в ближней - 16 и дальней - 17 зонах. Причем, при контроле взаимного положения лазерного пучка и элементов оптической системы, образующих усилительный канал, в процессе юстировки определяют положение центров масс регистрируемых изображений маркеров и юстировочного лазерного пучка.
Юстировка проводится в три этапа: (I) определение положения диафрагменных узлов 5, 7 в обоих фильтрах 4, 6 и ориентации торцевых зеркал 1 и 9; (II) запуск юстировочного пучка 13 и обеспечение его требуемой ориентации в дальней зоне с помощью зеркала 10; (III) обеспечение требуемой ориентации юстировочного пучка 13 в ближней зоне с помощью пары зеркал 10 и 11.
Световые маркеры, расположенные последними по ходу лазерного излучения (ТПФ-4) в четырехпроходном оптическом тракте, задают центр системы координат (положение оптической оси). Относительно этого центра определяются разъюстировки (векторы ошибок) остальных маркеров и юстировочного пучка.
На этапе I приводятся к требуемому взаимному положению изображения маркеров дальней зоны КПФ-4, КПФ-3, ТПФ-2 в плоскости ТПФ на четвертом проходе посредством управления наклоном зеркал 1, 9 и поперечным смещением диафрагменного узла КПФ 5. Диафрагменный узел ТПФ 7 предполагается жестко фиксированным, центр маркеров ТПФ-4 можно определять как середину отрезка между маркерами или как центр масс изображения маркеров. Фиксируем положение этой точки в датчике усилительного канала 15 на пикселе CCD-камеры, расположенном в точности между горизонтальной парой маркеров. Юстировочный пучок 13 не учитывается (в эксперименте он выключен). Управление зеркалами 1, 9 и диафрагменным узлом КПФ 5 осуществляется одновременно модернизированным СПГ алгоритмом. После выполнения указанных действий диафрагменные узлы 5, 7 и зеркала 1, 9 оказываются съюстированными, и этап I юстировки закончен.
На этапе II юстировки осуществляется запуск юстировочного пучка 13 в усилительный тракт (канал) под правильным углом, т.е. обеспечивается его требуемое положение в дальней зоне. Это реализуется с помощью поворотов заводящего зеркала 10 по двум осям с помощью модернизированного СПГ алгоритма, добиваясь, чтобы центр масс изображения фокального пятна на экране CCD-камеры совпал с известным пикселем, где уже расположены совмещенные центры всех маркеров.
Этап III. После нахождения правильной ориентации юстировочного пучка 13 в дальней зоне производится его юстировка в ближней зоне, т.е. центр юстировочного пучка 13 совмещается с центром масс изображений маркеров большого зеркала 1. Это осуществляется поворотами зеркала 11. При этом уже найденный оптимальный угол ввода излучения в усилительный канал изменится, поэтому повороты зеркала 11 необходимо компенсировать поворотами зеркала 10, равными по величине, но обратными по направлению поворотам зеркала 11. Управление зеркалом 11 также осуществляется модернизированным СПГ алгоритмом. Компенсация наклона зеркалом 10 проводится за одну итерацию после вычисления итогового наклона зеркала 11.
Для вычисления управляющих сигналов используется СПГ алгоритм, причем целевая функция, применяемая в СПГ алгоритме, зависит от отклонения центров масс изображений от предварительно определенного положения оптической оси системы. Параметр, контролирующий темп сходимости СПГ алгоритма, определяется текущим значением отклонения центра масс изображения от положения оптической оси. Результатом работы СПГ алгоритма является минимизация отклонения от положения оптической оси центров масс изображений.
Общая схема управления приводами исполнительных механизмов на основе СПГ алгоритма заключается в следующем. На экранах CCD-камер датчика силового канала 15 формируется картина маркеров и/или пучка в ближней 16 и дальней 17 зонах, определяется центр масс всех маркеров и/или пучка, который фиксируется компьютером. Затем с помощью блока управления производится стохастический пробный шаг по небольшому изменению наклонов контрольных элементов. После пробного шага регистрируется новое положение центра масс картины на экране, и на основе сравнения его значения с исходным делается целенаправленный корректирующий шаг по наклонам, после которого, как показывают расчеты, положение центра масс приближается к заранее определенному пикселю - положению оптической оси. На этом текущая итерация заканчивается, затем совершается очередная итерация и т.д., пока ошибка положения центра масс картины на экране относительно центра системы координат не достигнет минимального значения согласно заданному критерию.
Таким образом, может быть реализовано техническое решение по автоматизированной юстировке оптической системы с достижением технического результата, состоящего в упрощении и повышении надежности процедуры автоматизированной юстировки оптической системы.
Изобретение найдет применение в реализации системы автоюстировки оптических систем, в том числе и в системе автоюстировки 4-проходных схем усилительных каналов современных мощных многоканальных лазерных установок, таких как установка УФЛ-2М.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ЮСТИРОВКИ ОПТИЧЕСКОЙ СИСТЕМЫ С ПОМОЩЬЮ МАРКЕРОВ | 2014 |
|
RU2566367C1 |
| СПОСОБ НАСТРОЙКИ СИСТЕМЫ ТРАНСПОРТНЫХ ЗЕРКАЛ ЛАЗЕРНОЙ УСТАНОВКИ | 2024 |
|
RU2839289C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ МНОГОКАНАЛЬНОГО ЛАЗЕРА В ЗАДАННЫЕ ТОЧКИ МИШЕНИ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601505C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЮСТИРОВОЧНОГО НАСТРОЕЧНОГО ИЗЛУЧЕНИЯ ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНЫХ ПУЧКОВ НА МИШЕНЬ | 2024 |
|
RU2828645C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА НАВЕДЕНИЯ И РЕГИСТРАЦИИ ЮСТИРОВОЧНОГО ИЗЛУЧЕНИЯ МНОГОКАНАЛЬНОГО ЛАЗЕРА | 2020 |
|
RU2748646C1 |
| СПОСОБ МОНТАЖНОЙ НАСТРОЙКИ ЭЛЕМЕНТОВ ОПТИЧЕСКОЙ СИСТЕМЫ | 2016 |
|
RU2623699C1 |
| СПОСОБ НАВЕДЕНИЯ ЧАСТОТНО ПРЕОБРАЗОВАННОГО ИЗЛУЧЕНИЯ КАНАЛА ЛАЗЕРНОЙ УСТАНОВКИ НА МИШЕНЬ | 2021 |
|
RU2758944C1 |
| СПОСОБ ЮСТИРОВКИ ПРИЕМО-ПЕРЕДАЮЩЕЙ ЛАЗЕРНОЙ ЛОКАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2120645C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| СПОСОБ И УСТРОЙСТВО АЗИМУТАЛЬНО-УГЛОМЕСТНОЙ ИНДИКАЦИИ В ОПТИКО-ЛОКАЦИОННЫХ СИСТЕМАХ | 2015 |
|
RU2628301C2 |
Изобретение может быть использовано для автоматизированной юстировки элементов усилительного канала лазерных установок. Способ включает получение изображений юстировочного лазерного пучка и маркеров контрольных элементов оптической системы, центр которых определяется по паре маркеров, расположенных по обе стороны от центра на одинаковом расстоянии от него. Осуществляют случайный наклон контрольных оптических элементов, контролируют изменение положения изображений маркеров и юстировочного лазерного пучка путем вычисления отклонения центра масс этих изображений от оптической оси системы, вычисляют управляющие сигналы, которые подают на приводы исполнительных механизмов контрольных оптических элементов. Для вычисления управляющих сигналов используют стохастический параллельный градиентный (СПГ) алгоритм, целевая функция в котором зависит от отклонения центров масс изображений от оптической оси системы. Параметр, контролирующий темп сходимости СПГ алгоритма, определяется текущим значением отклонения центра масс изображения от положения оптической оси. Технический результат - упрощение и повышение надежности автоматизированной юстировки оптической системы. 1 з.п. ф-лы, 1 ил.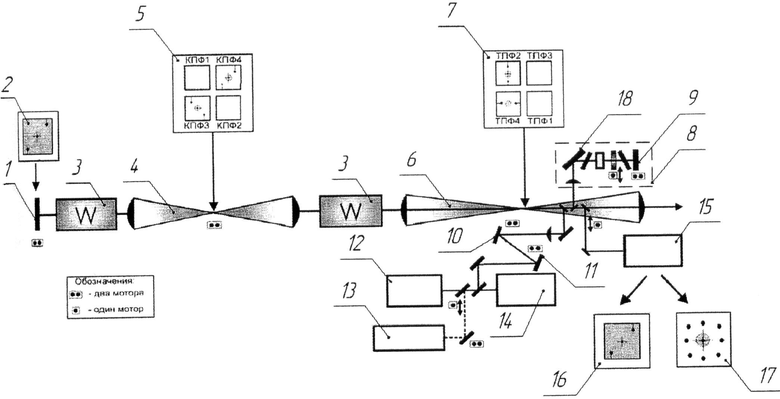
1. Способ автоматизированной юстировки оптической системы, заключающийся в контроле взаимного положения лазерного пучка и элементов оптической системы путем получения изображений юстировочного лазерного пучка и маркеров контрольных элементов оптической системы, при этом центр оптического элемента определяется по двум световым маркерам - паре маркеров, которые располагаются в плоскости элемента по обе стороны от центра и на одинаковом от него расстоянии; определении положения оптической оси системы; последующем вычислении управляющих сигналов и обеспечении управления контрольными оптическими элементами посредством подачи на приводы исполнительных механизмов этих сигналов, причем при контроле взаимного положения лазерного пучка и элементов оптической системы в процессе юстировки определяют положение центров масс регистрируемых изображений маркеров и юстировочного лазерного пучка; отличающийся тем, что осуществляют случайный наклон контрольных оптических элементов, контролируют изменение положения изображений маркеров и юстировочного лазерного пучка путем вычисления отклонения центра масс этих изображений от положения оптической оси системы, вычисляют поправки для управляющих сигналов, корректируют положение контрольных элементов посредством подачи этих управляющих сигналов на приводы исполнительных механизмов, причем осуществляют итерационный режим управления контрольными оптическими элементами, основанный на том, что для вычисления управляющих сигналов используют стохастический параллельный градиентный (СПГ) алгоритм, при этом целевая функция, применяемая в СПГ алгоритме, зависит от отклонения центров масс изображений от предварительно определенного положения оптической оси системы; параметр, контролирующий темп сходимости СПГ алгоритма, определяется текущим значением отклонения центра масс изображения от положения оптической оси; результатом работы СПГ алгоритма является минимизация отклонения от положения оптической оси центров масс изображений.
2. Способ автоматизированной юстировки оптической системы по п.1, отличающийся тем, что дополнительно осуществляют идентификацию пар маркеров за счет проведенной в процессе юстировки симметризации изображений маркеров в результате работы СПГ алгоритма.
| L | |||
| Hilsz, S | |||
| Challois, F | |||
| Nicaise, M | |||
| Luttmann, A | |||
| Adolf "Redesign of the image processing techniques used for the alignment of the LMJ | |||
| Amplifier Section" Proc | |||
| Опорное устройство, заменяющее подшипник | 1926 |
|
SU7797A1 |
| S.A | |||
| Belkov, S.G | |||
| Garanin "Concept of megajoule laser driver for | |||
| ICF", 15-th International Conference on Laser Optics, St | |||
| Petersburg | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| US 7064817 B1, 20.06.2006 | |||
| US 2011032968 A1, 10.02.2011. | |||

