Изобретение относится к области лазерной локации, в частности к системам с удаленными КО для высокоточного наведения излучения в процессе юстировки.
Известен способ юстировки приемо-передающей лазерной локационной системы (ППЛЛС) [1] , заключающийся в формировании тестового светового пучка через передающий канал, наблюдении отраженного пучка, измерении углового рассогласования тестового и отраженного пучков и его компенсации.
К недостаткам известного способа относится невысокая точность, обусловленная тем, что для компенсации используется точно определенная ориентация подвижных частей системы относительно топоцентрической системы координат [1], с. 176, 162. Это приводит к тому, что юстировка ППЛЛС не может быть осуществлена непосредственно для всей верхней полусферы, т.е. при произвольном направлении на лоцируемый ИСЗ предварительная юстировка будет сопровождаться ошибками.
Наиболее близок к изобретению и выбран авторами за прототип "Способ юстировки ППЛЛС" [2], заключающийся в формировании юстировочного лазерного пучка через передающий канал, визуализации направления в точку прицеливания, отражении юстировочного лазерного пучка в приемный канал и совмещении отраженного лазерного пучка с визуализированным направлением в точку прицеливания. Схема ППЛЛС, реализованной в [2], приведена на чертеже (фиг. 1).
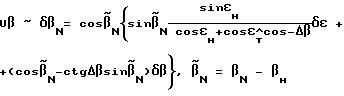
К недостаткам прототипа относится низкая точность. Это обусловлено тем, что при одновременном наведении излучения по двум угловым координатам (азимуту β и углу места ε ) с помощью одного опорно-поворотного устройства (ОПУ), как это наиболее часто реализуется в ППЛЛС, возникают эффекты взаимного влияния координат (ε,β), приводящие к взаимному развороту соответствующих координатных осей. Это может быть проиллюстрировано фиг. 2, где показан взаимный разворот приемного и передающего каналов, отъюстированных в отдельности, относительно топоцентрической системы координат Oεβ для εц = 50o, βц-βпер = 45o, где (εц,βц) - координаты точки прицеливания, βпер - азимут передающего канала ППЛЛС.
Из приведенного примера следует, что разворот осей координат может достигать значительных (до 21o) величин, что в общем случае приводит к разъюстировке ППЛЛС при  отличных от координат точки прицеливания εц,βц и, следовательно, к снижению точности известного способа.
отличных от координат точки прицеливания εц,βц и, следовательно, к снижению точности известного способа.
Вторым источником снижения точности и быстродействия является трудность вывода в точку прицеливания при ее задании абсолютными топоцентрическими координатами (ε
Совмещение осей приемного и передающего каналов осуществляют путем отражения юстировочного лазерного пучка в противоположном направлении (в приемный канал), например, с использованием уголкового отражателя. В этом случае возникают как систематические погрешности, вызванные неточным изготовлением уголкового отражателя, так и трудности, вызванные совмещением оси юстировочного лазерного пучка с осью приемного канала. Последние обусловлены тем, что направление отраженного юстировочного лазерного пучка зависит от углового положения ОПУ. При отражении юстировочного лазерного пучка возникают ошибки, связанные с конкретным исполнением ППЛЛС, а именно необходимостью учета конкретного месторасположения приемного канала, параллельно передающему, как в [2], либо совмещенных, что вызывает необходимость в смене алгоритма юстировки и снижении ее точности из-за требований учета углового положения подвижных элементов.
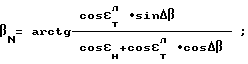
Технической задачей является повышение точности, что достигается тем, что в известном способе, заключающемся в формировании юстировочного лазерного пучка через передающий канал, визуализации направления в точку наведения (εн, βн) и совмещении юстировочного лазерного пучка с визуализированным направлением в точку прицеливания перед совмещением юстировочного лазерного пучка с визуализированным направлением определяют текущее положение юстировочного лазерного пучка (ε

выставляют зеркало наведения, после совмещения юстировочного лазерного пучка с визуализированным направлением в точку прицеливания визуализируют направление линии визирования, формируют в направлении, обратном точке прицеливания, марку, ориентированную относительно осей топоцентрической системы координат, формируют изображение марки через приемный канал и компенсируют линейное и угловое рассогласование марки и ее изображения.
На фиг. 1 приведена схема ППЛЛС, используемая в прототипе. На фиг. 2 приведены зависимости величины взаимного разворота отъюстированных приемного и передающего каналов при угловом рассогласовании оси ППЛЛС и линии прицеливания.
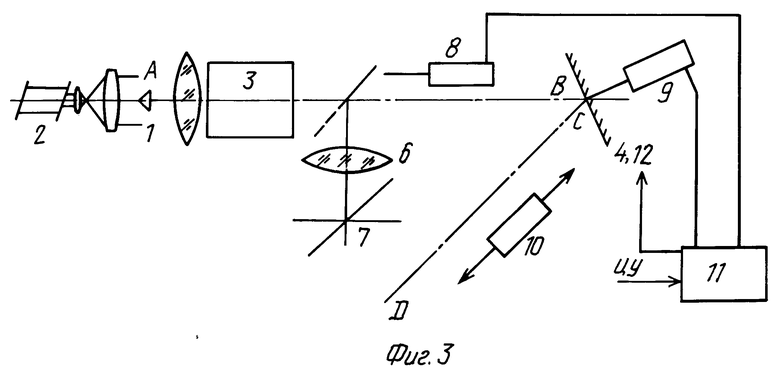
На фиг. 3 приведена оптическая схема юстировки ППЛЛС по предлагаемому способу.
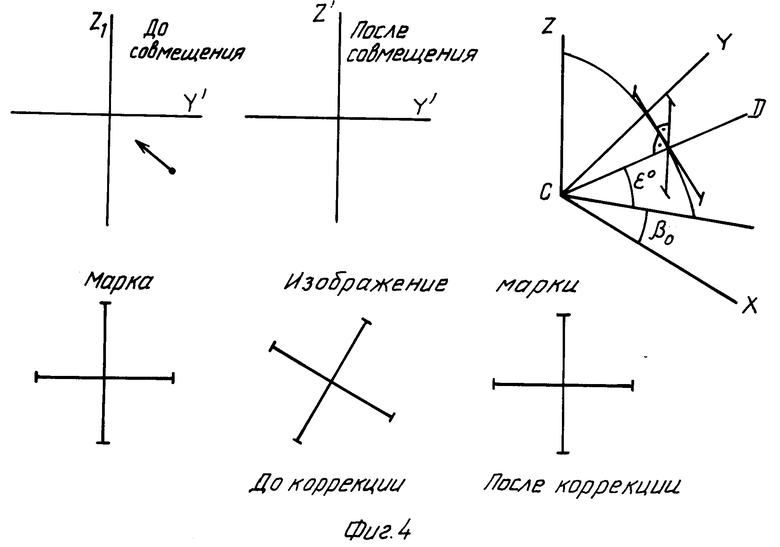
На фиг. 4 приведен вид поля зрения в процессе юстировки.
Введены следующие обозначения:
1 - селектор угловых мод
2 - юстировочный лазер
3 - активная среда ППЛЛС
4 - опорно-поворотное устройство (ОПУ)
5 - уголковый отражатель
6 - объектив приемного канала ППЛЛС
7 - фотоприемное устройство (ФПУ)
8 - 10 - размещение теодолита в процессе юстировки при определении текущего положения юстировочного лазерного пучка, выставке зеркала наведения (ОПУ) и формировании марки соответственно
11 - решающее устройство
12 - устройство управления.
Предложенный способ реализуется следующим образом.
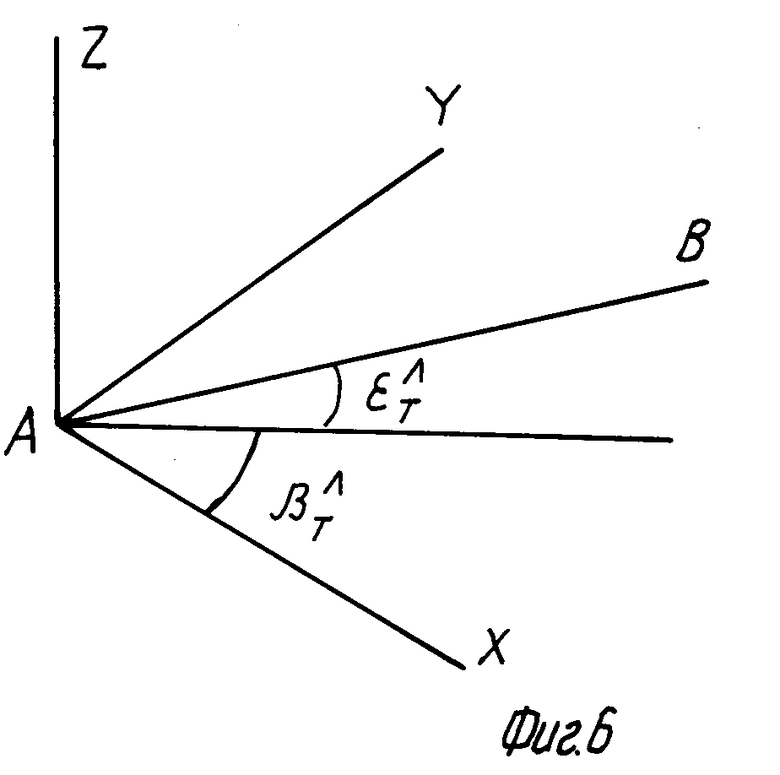
Рассмотрим оптическую схему ППЛЛС (см. фиг. 3). На первом этапе с помощью юстировочного лазера 2 через передающий канал (1, 3) формирует юстировочный лазерный пучок (AB). С помощью теодолита, установленного в поз. 8, осуществляют его привязку к местной топоцентрической системе координат OXYZ и определяют в этой системе координат азимут и угол места юстировочного лазерного пучка  (фиг. 6). Полученные значения вводят в решающее устройство 11, в котором по данным внешнего целеуказания (направление точки прицеливания (εн,βн) определяют требуемое положение нормали к поверхности зеркала наведения (ОПУ):
(фиг. 6). Полученные значения вводят в решающее устройство 11, в котором по данным внешнего целеуказания (направление точки прицеливания (εн,βн) определяют требуемое положение нормали к поверхности зеркала наведения (ОПУ):

(Вывод зависимостей 

Решающее устройство 11 представляет собой микропроцессор, состыкованный через устройства ввода на базе АЦП, реализующий решение зависимостей

Реализация блока 11 на стандартной элементарной базе не представляет затруднений, а для автоматизации процесса юстировки могут быть использованы фотоэлектрические автоколлимационные теодолиты типа 2T - 2A или им аналогичные.
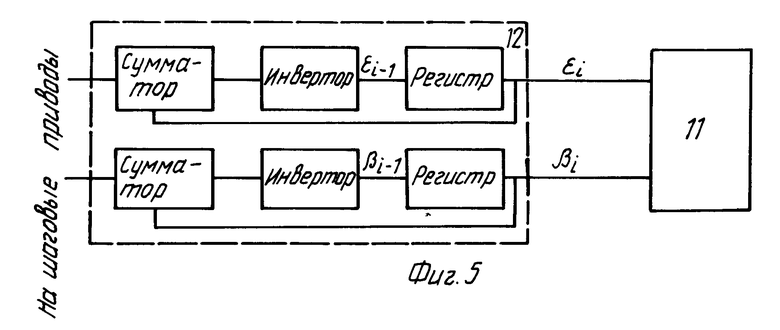
Выставка зеркала наведения (ОПУ 4) может быть осуществлена с помощью двухкоординатного шагового привода, управляемого от устройства управления 12, структурная схема которого (вариант) приведена на фиг. 5. Контроль положения ОПУ осуществляют с помощью теодолита 9, располагаемого за зеркалом наведения ОПУ (4).
По окончании выставки зеркала наведения юстировочный лазерный пучок (AB) и направление на точку прицеливания (CД) оказываются оптически сопряженными, что контролируют с помощью теодолита 10, установленного по направлению (ДC) (от точки прицеливания). В процессе контроля с помощью теодолита 10 может быть проконтролировано совпадение юстировочного лазерного пучка с направлением на точку прицеливания.
При азимутальном рассогласовании  не равном нулю, как уже было указано ранее, существует взаимное влияние обоих ортогональных компонентов β,ε. Если реальные координаты ИСЗ (βц, εн) отличаются от координат точки прицеливания (βн,εн), то при юстировке ППЛЛС по известному способу сигналы рассогласования δε = εц - εн, δβ = βц - βн непосредственно трансформируются в сигналы управления Uε ~ δε, Uβ ~ δβ,, что вследствие разворота системы координат при Δβ ≠ 0 приводит к неустранимым ошибкам.
не равном нулю, как уже было указано ранее, существует взаимное влияние обоих ортогональных компонентов β,ε. Если реальные координаты ИСЗ (βц, εн) отличаются от координат точки прицеливания (βн,εн), то при юстировке ППЛЛС по известному способу сигналы рассогласования δε = εц - εн, δβ = βц - βн непосредственно трансформируются в сигналы управления Uε ~ δε, Uβ ~ δβ,, что вследствие разворота системы координат при Δβ ≠ 0 приводит к неустранимым ошибкам.
Приведем без вывода выражения, связывающие сигналы управления ОПУ с сигналами рассогласования δε, δβ 
Для устранения перекрестного влияния рассогласований δε и δβ на управляющие сигналы Uε и Uβ с помощью теодолита 10 формируют марку, оси которой ориентированы соответственно в азимутальной и угломестной плоскостях по нормали к направлению линии визирования (см. фиг. 4). Изображение светящейся марки М проецируется в приемный канал и наблюдается на экране ВКУ, подключенного к фотоприемному устройству 7 (в случае телевизионного регистратора).
Путем подвижек ФПУ (аналогично известным способам) осуществляется совмещение центра ФПУ (нулевого отсчета) с центром изображения марки (фиг. 4).
Для компенсации взаимного влияния рассогласований δε,δβ осуществляют разворот ФПУ на угол α, величина которого может быть определена по взаимному угловому рассогласованию изображения марки М и самой марки М. В случае ТВ ФПУ это осуществляют поворотом отклоняющей системы передающей ТВ камеры либо разворотом ФПУ в целом.
В качестве критерия точности компенсации углового рассогласования может служить совпадение направления строчной развертки с ориентацией горизонтальной оси изображения марки М.
Преимуществами заявляемого способа по сравнению с прототипом является повышенная точность, обусловленная компенсацией следующих основных факторов:
- устранением взаимного влияния азимутальной и угломестной составляющей рассогласования точки прицеливания и реального положения лоцируемого ИСЗ;
- устранением влияния на точность юстировки погрешностей изготовления ретроотражателей, а также
- повышением точности и быстродействия при выводе в точку прицеливания за счет управления положением зеркала наведения по направлению нормали к его поверхности.
Количественная оценка повышения точности, например, для случая неточного отражения юстировочного пучка определяется удвоенной ошибкой изготовления ретроотражателя и достигает единиц угловых минут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1991 |
|
RU2042156C1 |
| СИСТЕМА НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2120106C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2125279C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124740C1 |
| СПОСОБ НАВЕДЕНИЯ ИЗЛУЧЕНИЯ МНОГОКАНАЛЬНОГО ЛАЗЕРА В ЗАДАННЫЕ ТОЧКИ МИШЕНИ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2601505C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1988 |
|
RU2050560C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭНЕРГЕТИЧЕСКОЙ РАСХОДИМОСТИ ЛАЗЕРНОГО ПУЧКА | 1993 |
|
RU2091729C1 |
Использование: в области лазерной локации. Сущность изобретения: в способе, основанном на формировании юстировочного лазерного пучка через передающий канал, визуализации направления в точку наведения с координатами εн, βн и совмещении юстировочного лазерного пучка с визуализированным направлением в точку прицеливания, перед совмещением юстировочного лазерного пучка с визуализированным направлением определяют текущее положение юстировочного лазерного пучка εт, βт, определяют требуемое положение зеркала наведения, выставляют его, после совмещения юстировочного лазерного пучка с визуализированным направлением в точку прицеливания визуализируют направление линии визирования, формируют марку, ориентированную относительно осей топоцентрической системы координат в направлении, противоположном точке прицеливания, формируют изображение марки через приемный канал и компенсируют линейное и угловое рассогласование марки и ее изображения. 6 ил.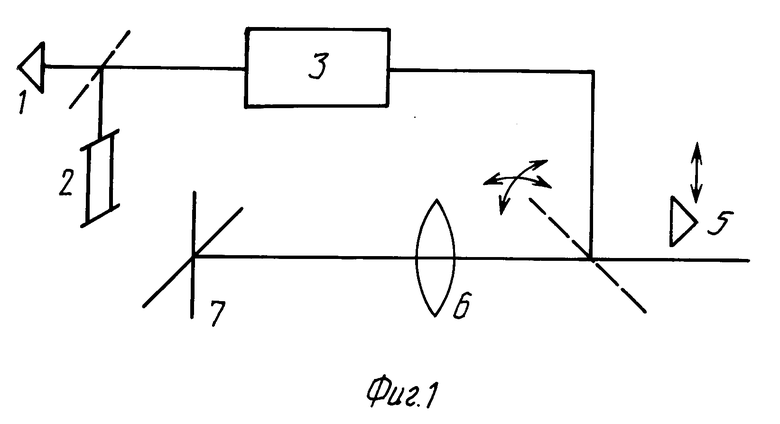
Способ юстировки приемо-передающей лазерной локационной системы, основанный на формировании юстировочного лазерного пучка через передающий канал, визуализации направления в точку наведения с координатами εн, βн и совмещении юстировочного лазерного пучка с визуализированным направлением в точку прицеливания, отличающийся тем, что перед совмещением юстировочного лазерного пучка с визуализированным направлением определяют текущее положение юстировочного лазерного пучка ε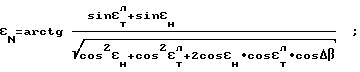
Δβ=β
выставляют зеркало наведения, после совмещения юстировочного лазерного пучка с визуализированным направлением в точку прицеливания визуализируют направление линии визирования, формируют марку, ориентированную относительно осей топоцентрической системы координат в направлении, противоположном точке прицеливания, формируют изображение марки через приемный канал и компенсируют линейное и угловое рассогласование марки и ее изображения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Труды ЦНИИГАиК "Исследование в области геодезического и гравиметрического приборостроения", вып.221, М., 1979, с.156-186 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
