Область техники, к которой относится изобретение
Изобретение относится к электромашиностроению, а именно к магнитным бесконтактным планетарным редукторам, предназначенным для привода исполнительных механизмов и устройств с одновременной редукцией частоты вращения.
Уровень техники
Известны бесконтактные магнитные планетарные редукторы для привода исполнительных механизмов с одновременной редукцией частоты вращения, содержащие корпус, неподвижные и подвижные зубчатые центральные колеса из магнитомягких материалов, водило, эксцентрично расположенный зубчатый сателлит из магнитомягкого материала, систему подмагничивания в виде постоянного магнита или обмотки возбуждения с осевым подмагничиванием, магнитопровод, противовесы, подшипники, опорные поверхности для сателлита [1, 2 и 3].
В таких редукторах магнитный поток подмагничивания замыкается не только через рабочий зазор между зубчатыми поверхностями сателлита и центральных колес, но и через дополнительный магнитопровод между корпусом и подвижным центральным колесом. Это обстоятельство приводит к уменьшению магнитной проводимости магнитной цепи редуктора, повышенному расходу активных материалов (постоянного магнита, обмоточной меди, магнитомягкого материала и др.), и, как следствие, увеличению массы и габаритных размеров, а также ухудшает удельные энергетические показатели редукторов, такие как крутящий момент, тормозной момент, максимальный момент и др.
Сущность изобретения
Наиболее близким, по существу, к предлагаемому изобретению является бесконтактный магнитный планетарный редуктор, описанный в [1]. Целью настоящего изобретения является улучшение удельных энергетических показателей и уменьшение массогабаритных показателей.
Цель по улучшению энергетических показателей достигается тем, что ответные опорные поверхности, на которые опирается водило, выполнены в корпусе, зубчатые центральные колеса и сателлит выполнены с одинаковым шагом, центральные колеса с равными количествами зубьев установлены неподвижно в корпусе (на статоре), сателлит выполнен с двумя зубчатыми венцами равными количествами зубьев с минимальной разницей числа зубьев от числа зубьев на центральных колесах, например 1, и связан с выходным валом через устройство, способное передавать несоосное вращательное движение, например, через шарнирное устройство, карданное устройство и др., геометрические параметры опорных поверхностей и параметры зубчатых колес выполнены с соблюдением соотношения
δмин=(Z1-Z2)tz/2π-(d1-d2)/2,
где δмин - минимальный зазор между центральными колесами и сателлитом, мм;
Z1 и Z2 - числа зубьев на центральных колесах и на сателлите;
tz - шаг зубчатых поверхностей на сателлите и центральных колесах, мм;
d1 и d2 - диаметры опорных устройств в корпусе и на сателлите, мм.
В предложенном магнитном редукторе в отличие от известных магнитный поток подмагничивания замыкается только через рабочий зазор между зубчатыми поверхностями сателлита и центральных колес, что приводит к увеличению магнитной проводимости магнитной цепи редуктора. Это приводит к увеличению энергетических показателей редуктора. Наряду с этим в предлагаемом устройстве по сравнению с известными при прочих равных условиях удваиваются значения крутящего момента, тормозного момента и максимального момента: если в известных редукторах названные параметры определяются магнитным потоком одной пары взаимодействующих зубчатых колес, например, между парой подвижного центрального колеса и одного зубчатого венца (половины) сателлита, в предложенном устройстве эти моменты определяются взаимодействием двух неподвижных колес и двух зубчатых венцов сателлита. Таким образом обеспечивается достижение цели изобретения - и улучшение удельных энергетических показателей и наряду с этим достигается уменьшение размеров и массы.
Перечень фигур, чертежей и иных материалов
На чертеже изображен продольный разрез активной части предлагаемого магнитного редуктора.
Сведения, подтверждающие возможность осуществления изобретения
Предлагаемый магнитный планетарный редуктор по фиг. 1 содержит цилиндрический немагнитный корпус 1, внутри которого размещено составное центральное колесо 2, состоящее из двух половинок из магнитомягкого материала с зубчатыми поверхностями на внутренней поверхности с числом зубьев Z1 и с одинаковым шагом tz, постоянного магнита 3 с осевым подмагничиванием между ними. Внутри корпуса размещен ротор (сателлит) 4 из магнитомягкого материала в виде полого цилиндра, на наружной поверхности которого выполнены Z2 зубьев также с одинаковым шагом tz. Наружная цилиндрическая поверхность ротора (сателлита) опирается на цилиндрический выступ (расточку), выполненный на крышках корпуса 5. Внутри ротора расположен вал - водило 6 с эксцентрической поверхностью и противовесами 7, опирающийся на через расточку (опоры) на крышки 5. На правой крышке через подшипники качения установлен выходной вал 8, который сопряжен через устройство передачи несоосного вращательного движения 9 с ротором. Это устройство может быть шарнирной муфтой, как показано на чертеже, муфтой Кардана, Альстома, Сешерона и др.
Редуктор работает следующим образом. Магнитный поток постоянных магнитов замыкается по магнитной цепи, образованной корпусом, сателлитом, воздушным зазором между зубчатыми поверхностями центральных колес и сателлита. При этом под действием сил притяжения зубчатых поверхностей центрального колеса и сателлита, обусловленных магнитным полем постоянного магнита, сателлит занимает эксцентричное относительно центрального колеса положение, определяемое размерами опорных поверхностей: внешнего диаметра d2 опорной поверхности на сателлите и цилиндрической расточки d1 на крышках корпуса. Последние выполнены таким образом, чтобы между поверхностями центрального колеса и сателлита сохранялся гарантированный воздушный зазор δмин. Ввиду того, что обращенные друг к другу зубчатые поверхности расположены эксцентрично, основная часть магнитного потока окажется сосредоточенным в зоне минимального воздушного зазора δмин. Размеры воздушного зазора δмин, эксцентриситета e, диаметров опорных поверхностей d1 и d2, числа зубьев и шаг зубчатых поверхностей на сателлите и центральных колесах должны удовлетворять соотношениям
e=(d1-d2)/2;
δмин=(Z1-Z2)tz/2π-e.
Значение δмин принимается в пределах 0,1…0,15 мм. Взаимодействие магнитного потока зубчатых поверхностей сателлита и центральных колес определяет силовое действие между ними. При неподвижном водиле и центральных колесах развивается тормозной момент. При вращении водила из-за разницы числа зубьев зубчатых поверхностей на центральном колесе и сателлите последний будет совершать вращательное движение относительно своей оси со скоростью, определяемой соотношением
nсат=nвод(Z1-Z2)/Z2,
где nсат - скорость вращения сателлита, об/мин;
nвод - скорость вращения водила, об/мин.
Таким образом, в предлагаемом устройстве происходит редукция скорости вращения водила в i=Z2/(Z1-Z2) раза.
Для обеспечения условия вращения сателлита без проскальзывания относительно опорных поверхностей на крышке числа зубьев на центральном колесе и сателлите должны быть связаны со значениями диаметров соотношением
e/d2=(Z1-Z2)/Z2;
d1=d2+2e.
Вращения сателлита без проскальзывания можно достичь размещением между опорными поверхностями подшипников качения, т.е. выполнения одной из опорных поверхностей в виде опоры качения. При этом нет необходимости в соблюдении вышеуказанных соотношений между числами зубьев зубчатых колес и геометрических параметров опорных поверхностей.
В предложенном магнитном редукторе в отличие от известных магнитный поток подмагничивания замыкается только через рабочий зазор между зубчатыми поверхностями сателлита и центральных колес, что приводит к увеличению магнитной проводимости магнитной цепи редуктора. Если в известных редукторах крутящий момент, тормозной момент и максимальный момент определялись магнитным потоком одной пары взаимодействующих зубчатых колес, например между парой подвижного центрального колеса и одного зубчатого венца (половины) сателлита, в предложенном устройстве эти моменты определяются взаимодействием двух неподвижных колес и двух зубчатых венцов сателлита. Т.е. кроме увеличения магнитного потока из-за увеличения проводимости магнитной цепи ожидается удвоение указанных моментов. Таким образом, обеспечивается достижение цели изобретения - и улучшение удельных энергетических показателей. Поэтому предлагаемое устройство по сравнению с известными при прочих равных условиях имеет меньшие габаритные размеры, массу, расход активных материалов, развивает большие крутящий момент, тормозной момент, максимальный момент и др.
Литература
1. Приводной механизм антенны. Описание авторского свидетельства на изобретение №301749 МПК H02Q 1/12, 1971.
2. Механизмы с магнитной связью. Л., «Машиностроение» (Ленинградское отделение), 1973. Авт.: Ганзбург Л.Б. и др., стр. 140.
3. Механизмы с магнитной связью. Л., «Машиностроение» (Ленинградское отделение), 1973. Авт.: Ганзбург Л.Б. и др., стр. 141.
| название | год | авторы | номер документа |
|---|---|---|---|
| Магнитный редуктор, встраиваемый в электродвигатель | 2017 |
|
RU2683587C1 |
| МЕХАТРОННОЕ УСТРОЙСТВО | 2013 |
|
RU2543522C2 |
| БЕЗВОДИЛЬНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2011 |
|
RU2463499C1 |
| ПЛАНЕТАРНЫЙ ЗУБЧАТЫЙ МЕХАНИЗМ С ДВОЙНЫМИ САТЕЛЛИТАМИ | 2008 |
|
RU2355923C1 |
| БЕЗВОДИЛЬНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2010 |
|
RU2442045C1 |
| ПЛАНЕТАРНАЯ ЗУБЧАТАЯ ПЕРЕДАЧА | 2008 |
|
RU2404382C2 |
| БЕЗВОДИЛЬНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2011 |
|
RU2466315C1 |
| Планетарная прецессионая передача | 1988 |
|
SU1753101A1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 2013 |
|
RU2539438C1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР С ДВУМЯ СООСНЫМИ ВЫХОДНЫМИ ВАЛАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ | 2016 |
|
RU2729324C2 |
Изобретение относится к электротехнике, к магнитным бесконтактным планетарным редукторам, предназначенным для привода исполнительных механизмов и устройств с одновременной редукцией частоты вращения. Технический результат состоит в улучшении энергетических показателей и уменьшении габаритов. Магнитный планетарный редуктор содержит корпус, неподвижные и подвижные зубчатые центральные колеса из магнитомягких материалов, водило, эксцентрично расположенный зубчатый сателлит из магнитомягкого материала, магнитопровод, противовесы, подшипники. Система подмагничивания выполнена в виде постоянного магнита или обмотки возбуждения с осевым подмагничиванием, опорные поверхности для сателлита имеют в корпусе ответные опорные поверхности, на которые опирается сателлит. Зубчатые центральные колеса и сателлит выполнены с одинаковым шагом. Центральные колеса с равными количествами зубьев установлены неподвижно в корпусе (на статоре). Сателлит выполнен с двумя зубчатыми венцами равными количествами зубьев с минимальной разницей числа зубьев от числа зубьев на центральных колесах и связан с выходным валом через устройство, способное передавать несоосное вращательное движение, например, через шарнирное устройство, карданное устройство и др. Геометрические параметры опорных поверхностей и параметры зубчатых колес выполнены с соблюдением соотношения между числами зубьев на центральных колесах и на сателлите и диаметрами опорных поверхностей в корпусе и сателлите. 1 з.п. ф-лы, 1 ил.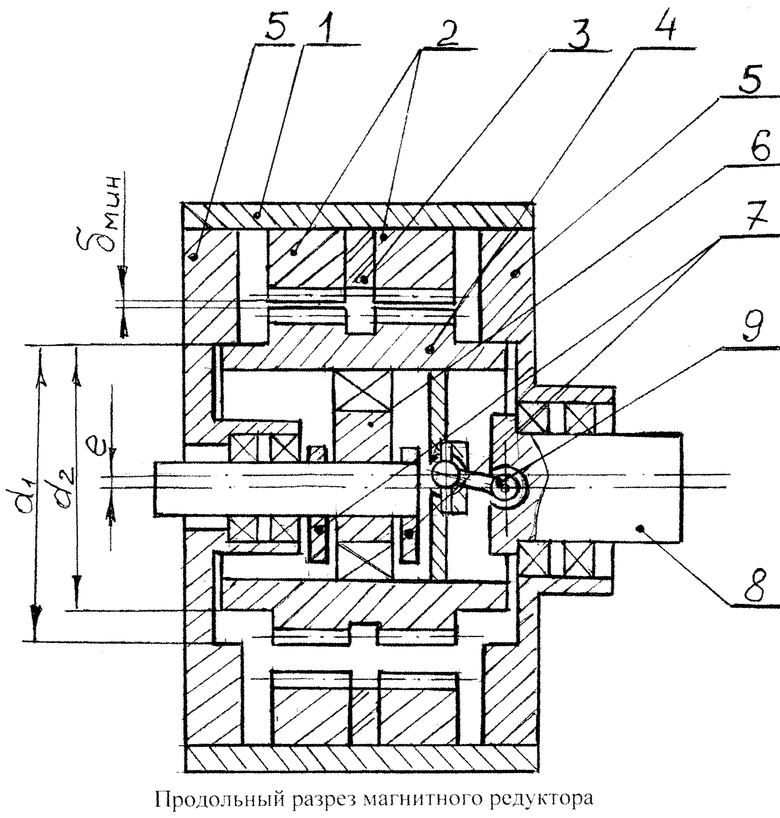
1. Магнитный планетарный редуктор, содержащий корпус, неподвижные и подвижные зубчатые центральные колеса из магнитомягких материалов, водило, эксцентрично расположенный зубчатый сателлит из магнитомягкого материала, систему подмагничивания в виде постоянного магнита или обмотки возбуждения с осевым подмагничиванием, магнитопровод, противовесы, подшипники, опорные поверхности для сателлита, отличающийся тем, что ответные опорные поверхности, на которые опирается сателлит, выполнены в корпусе, зубчатые поверхности центрального колеса и сателлита выполнены с одинаковым шагом, центральные колеса с равными количествами зубьев установлены неподвижно в корпусе (на статоре), сателлит выполнен с двумя зубчатыми венцами равными количествами зубьев с минимальной разницей числа зубьев от числа зубьев на центральных колесах и связан с выходным валом через устройство, способное передавать несоосное вращательное движение, например через шарнирное устройство, геометрические параметры опорных поверхностей и параметры зубчатых колес выполнены с соблюдением соотношения
δмин=(Z1-Z2)tz/2π-(d1-d2)/2,
где δмин - минимальный зазор между центральными колесами и сателлитом, мм;
Z1 и Z2 - числа зубьев на центральных колесах и на сателлите;
tz - шаг зубчатых поверхностей на сателлите и центральных колесах, мм;
d1 и d2 - диаметры опорных поверхностей в корпусе и на сателлите, мм.
2. Магнитный планетарный редуктор по п. 1, отличающийся тем, что ответные опорные поверхности в корпусе, на которые опирается сателлит, выполнены в виде подшипников качения.
| ПРИВОДНОЙ МЕХАНИЗМ АНТЕННЫ | 0 |
|
SU301749A1 |
| Планетарный редуктор с дистанционным переключением | 1961 |
|
SU144081A1 |
| Электромеханическая передача | 1981 |
|
SU989700A2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕКУПЕРАТИВНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2001 |
|
RU2210849C1 |
| Способ передачи сигналов по каналам связи с частотной или фазовой модуляцией | 1949 |
|
SU83308A1 |
| WO 9421916 A1, 29.09.1994 | |||

