Изобретение относится к морским летательным аппаратам, а именно к экранопланам, и может быть использовано при поисково-спасательных работах с помощью спасательного подводного аппарата (СПА), в том числе в морях арктического бассейна.
Известные экранопланы (Белавин Н.И. Экранопланы. Судостроение. Л., 1977, с.154-156 [1], патент US №178967688 A, 16.05.1972 [2], авторское свидетельство SU №1786768 A1, 27.07.1996 [3], авторское свидетельство SU №643382 A1, 28.01.1979 [4]) включают, например, экраноплан Х-114 - носитель патрульных катеров [1], недостатком которого является то, что он не приспособлен для обеспечения работы СПА, в том числе в сложных погодных условиях. При этом корпус экраноплана, выполненный с тремя сильно развитыми в высоту поплавками, не обеспечивает возможность выполнения спуско-подъемной операции при значительном волнении, так как спуск и подъем подводного аппарата (ПА) может производиться, когда экраноплан находится на плаву и подвержен качке, а качка ПА между поплавками становится больше, чем на свободной воде вследствие интерференции волн. Спуско-подъемное устройство (СПУ) не имеет ответной части для стыковки с подъемным штоком ПА, не обеспечивает автоматической отдачи штока ПА при спуске его на воду.
Другой спасательный экраноплан (патент RU №2019456 C1, 15.09.1994 [5]) имеет улучшенные эксплуатационные качества при обеспечении спасения людей из аварийного объекта на грунте с помощью СПА. Это достигается тем, что спасательный экраноплан, содержащий фюзеляж, крыло с элеронами и закрылками, горизонтальное и вертикальное оперения, шайбы, двигатели, спуско-подъемное устройство шахтного типа, снабжен системой образования воздушной подушки, включающей стартовые двигатели, приемные патрубки и сопла, расположенные на фюзеляже и крыле, которое снабжено поворотными щитками, образующими с шайбами и опущенными элеронами и закрылками ограждение воздушной подушки, фюзеляж снабжен поворотными в поперечной плоскости дефлекторами с приводными рычагами и выполнен с нишами под них. При этом каждый дефлектор в рабочем положении сопряжен со стартовым двигателем и приемным патрубком системы образования воздушной подушки, а шахта спуско-подъемного устройства снабжена нижними створками. Кроме того, створки шахты по внутренней стороне снабжены эластичными штырями переменной длины, соответствующей боковым обводам спасательного подводного аппарата, съемной комингс-площадкой и направляющими в виде угольников для нее.
Спасательный экраноплан [5] имеет однокорпусный фюзеляж, стартовые двигатели в носу, маршевые двигатели в корме, вертикальное оперение, горизонтальное оперение, шахту в средней части фюзеляжа, ограниченную переборками, с расположенными в ней спуско-подъемным устройством (СПУ) для спуска и подъема СПА с подъемными штоками. В носовой и кормовой частях днища фюзеляжа, а также на крыльях расположены сопла системы образования воздушной подушки, включающей также приемный патрубок, поворотный дефлектор с нишей для него и приводными рычагами. Шахтное СПУ включает силовые связи с автоматическими захватами, направляющие канат, проходящие через захваты и запасованные на автоматическую лебедку крепления, например, в виде талрепов, закрепляющие в исходном положении в шахте на съемной комингс-площадке, выполненной в виде цилиндрической обечайки, имеющей в верхней части гладкую опору, диаметр которой соответствует комингсу СПА. Комингс-площадка установлена на створках шахты, которые в закрытом положении зафиксированы гидрозахватами и обеспечивают герметичность шахты. Для фиксирования положения комингс-площадки предусмотрены направляющие в виде расположенных по окружности угольников. Створки с внутренней стороны снабжены вертикально установленными эластичными штырями, высота которых соответствует боковым обводам СПА. Открытие створок может производиться, например, гидроприводом. В носовой части фюзеляжа расположена гидроакустическая станция (ГАС) связи с опускным прибором. Крылья оборудованы концевыми шайбами, элеронами и закрылками. Сопла, расположенные на крыльях, закрыты поворотными щитками. В исходной позиции экраноплан занимает водоизмещающее положение. Створки шахты закрыты. СПА установлен на съемную комингс-площадку, соединен автоматическими захватами с СПУ и раскреплен талрепами.
При старте спасательного экраноплана дефлектор утоплен в нишу и воздушный поток от двигателей используется для создания тяги и экрана под крылом. Для обеспечения режима полета включаются маршевые двигатели, а при необходимости могут использоваться дополнительно и стартовые двигатели. Маневрирование обеспечивается оперением.
С прибытием в заданный район дефлектор приводными рычагами переводится в рабочее положение, сопрягая стартовый двигатель с приемным патрубком системы образования воздушной подушки. Включаются стартовые двигатели. Опускаются элероны, закрылки и щитки, образуя ограждение подушки. Экраноплан движется в режиме на воздушной подушке. При необходимости занятия водоизмещающего положения и нахождения в дрейфе двигатели выключаются. В этот период с помощью гидроакустической системы (ГАС) может быть установлен контакт с объектом на грунте. Для спуска на воду СПА стартовые двигатели включаются в режим работы "на воздушной подушке". Экраноплан, не имея хода, поднимается над поверхностью воды, что исключает его качку. При образовании воздушной подушки снижается высота волны под фюзеляжем. Отдаются крепления и СПА приподнимается грузовыми связями СПУ. Комингс-площадка убирается со створок на палубу шахты. Открываются створки шахты и СПА опускается на воду. Усилие натяжения в связях СПУ при посадке СПА на воду падает и автоматические захваты освобождают штоки СПА, который после дифферентовки погружается и следует к объекту на грунте. В период работы СПА створки шахты могут быть закрыты, а экраноплан может занять водоизмещающее положение и обеспечивать связь с СПА и объектом на грунте с помощью ГАС. После погружения садится на комингс-площадку аварийного объекта на грунте, принимает спасенных и всплывает с ними на поверхность. Для приема спасенных на борт экраноплан следует к всплывшему СПА. Включается режим "на воздушной подушке". Открываются створки шахты. СПА входит между створками, которые, смыкаясь, фиксируют его положение под шахтой упругими штырями, одновременно выполняющими роль кранцевой защиты. Для исключения относительных вертикальных колебаний СПА и экраноплана за штоки СПА заводятся направляющие канаты и автоматическая лебедка включается в режим слежения, прижимая СПА к верхним рядам защитных штырей. Спасенные выводятся из СПА в шахту. При необходимости рейс СПА может повториться. Для этого створки открываются, а лебедка включается в режим травления. При снижении усилия натяжения каната он автоматически отдается, освобождая СПА. После вывода последней группы спасенных по направляющим канатам опускаются грузовые захваты, автоматически срабатывающие при посадке на штоки. После стыковки СПА с СПУ створки раскрываются и СПА поднимается в шахту. Створки закрываются. Устанавливается комингс-площадка, на которую опускают СПА и закрепляют талрепами, после чего экраноплан следует на базу. При необходимости вывод спасенных из СПА может производиться после его подъема в шахту.
Конструкция спасательного экраноплана [5] обеспечивает использование спасательного ПА при спасении людей из аварийных объектов на грунте.
Известно, что важнейшей характеристикой летательного аппарата, наряду с аэродинамическими и гидродинамическими качествами, является весовая отдача, т.е. доля его полетного веса, которая может быть использована для перевозки полезного груза. Поскольку около 40% суммарного веса летательного аппарата составляет вес корпуса, то уменьшение последнего является одним из важнейших путей увеличения весовой отдачи (Экранопланы: проблемы и перспективы / Л.Д. Волков, А.А. Русецкий // Судостроение №1, 1995, с.4). В тоже время, известный экраноплан [5] перенасыщен многочисленными конструктивными элементами и его эксплуатация обусловлена наличием на борту высокой энерговооруженности как для обеспечения режима полета на экране, так и при создании режима воздушной подушки. Так, например, создание воздушной подушки под экранопланом [5] требует наличия на борту мощных воздушных нагнетателей.
Для создания воздушной подушки под днищем экраноплана используются элероны, закрылки и щитки, которые, опускаясь в воду, образуют жесткое ограждение подушки после посадки экраноплана. Наличие элементов жесткого ограждения, расположенных в поперечной плоскости по курсу движения экраноплана, создает дополнительную гидродинамическую нагрузку на корпус экраноплана, приводит к перерасходу топлива и требует обеспечения устойчивости движения экраноплана в данном режиме, ухудшающегося из-за наличия ограждения, которое заглублено в воду. При этом качка полностью не исключается, особенно при воздействии ветра и волнения. Кроме того, при нахождении экраноплана в режиме «воздушной подушки» при наличии ветра и волнения имеет место парусность судна и при этом обеспечение позиционирования экраноплана для спуска или принятия на борт СПА может быть существенно затруднено.
Существенным недостатком известного технического решения [5] является то, что для экранопланов старт с водной поверхности связан с преодолением значительного гидродинамического сопротивления, максимум которого у экраноплана наблюдается на скоростях около 0,8 от скорости отрыва от воды. При таких скоростях отрыва гидродинамические нагрузки, действующие на корпус или специальные стартовые элементы, оказываются значительными и ввиду этого экраноплан [5] подвержен высоким динамическим нагрузкам на фюзеляжи при взлете и посадке на водную поверхность.
Задача снижения этих скоростей является весьма актуальной для экранопланов. В качестве вариантов снижения скоростей отрыва предлагаются различные варианты таких технических решений (Экранопланы: проблемы и перспективы / Л.Д. Волков, А.А. Русецкий // Судостроение №1, 1995, с.5). Например, предлагается вариант бесконтактного взлета и посадки, когда аппарат отрывается от воды вертикально на малую высоту, а затем выполняет разбег. Однако эта идея, требующая большой энерговооруженности и мощных воздушных нагнетателей, не получила дальнейшего развития, а для условий взволнованного моря она вряд ли в принципе реализуема. Более реально применение гибких элементов в составе конструкций, ограждающих динамическую подушку, как средств уменьшения действующих на них нагрузок. При этом система поддува обеспечивает экраноплану также определенный уровень амфибийности, который может быть реализован в сочетании с применением колесного шасси.
Поэтому оптимальным решением явился бы старт с воздушной подушкой, ограниченной гибкими ограждениями (а не жесткими, как в известном техническом решении [5]), с нагнетателями вентиляционного типа. Подобная конструкция, наряду с уменьшением динамических нагрузок на фюзеляжи, обеспечила бы аппарату и полную амфибийность устройства без сложного колесного шасси. Однако на пути этого решения стоят проблемы уборки и выдвижения гибкого ограждения при взлетно-посадочных операциях и обеспечения устойчивости движения аппарата в переходном режиме, ухудшающегося из-за наличия ограждения. Поэтому практическое применение получили лишь надувные пневмобаллоны-поплавки, установленные снизу на корпусе малого экраноплана (Экранопланы: проблемы и перспективы / Л.Д. Волков, А.А. Русецкий // Судостроение №1, 1995, с.5, рис.6).
Наряду с аэродинамическими средствами снижения сопротивления и действующих на корпус экраноплана нагрузок применяются и гидродинамические устройства в виде гидролыж, расположенных под корпусом и имеющих амортизационную подвеску (Поисково-спасательный экраноплан «Спасатель» / А.И. Денисов // Судостроение №1, 1995, с.9-12 [6]), эффективность которых в переходном режиме движения экраноплана проявляется только при не большом волнении.
Поисково-спасательный экраноплан [6] предназначен для поиска и спасения потерпевших посредством морских надувных спасательных средств (самоходные надувные спасательные шлюпки).
Силовая установка экраноплана состоит из восьми двухконтурных турбореактивных двигателей с максимальной тягой 13 тонн каждый. Главные двигатели размещены на пилонах между крылом и кабиной пилота в верхней части фюзеляжа. Корпус экраноплана функционально разделен по длине на четыре отсека: носовой, средний, кормовой и киля со стабилизатором.
В носовом отсеке находятся помещения с оборудованием и конструкциями, обеспечивающими движение экраноплана, ходовая рубка, вспомогательные двигатели и агрегаты силовой установки, в среднем отсеке экраноплана оборудованы медицинские помещения, в кормовом отсеке расположены каюты для спасенных и помещения для спасательных средств (надувные шлюпки, полужесткие надувные спасательные плоты и подъемные устройства, включая лебедку), в отсеке киля со стабилизатором расположена электроэнергетическая установка, аппаратура для обеспечения навигации, связи и поисковых работ.
Развертывание плавучих спасательных средств осуществляется при нахождении экраноплана в водоизмещающем режиме с обоих бортов в корневой части крыла в сторону закрылков.
Поисковое оборудование состоит из оптической, телевизионной, инфракрасной аппаратуры, двух радиолокационных станций, радиолокационных и связных пеленгаторов, прожекторов.
Для обеспечения навигации экраноплан оборудован автоматизированным навигационным комплексом, включающим радиодоплеровский лаг, гирогоризонткомпас, магнитный компас, приемоиндикаторы радионавигационной и спутниковой навигационной системы, рулонный автопрокладчик, совмещенный индикатор радиолокационной информации и аппроксимированной навигационной карты, а также экраноплан оборудован курсовой системой авиационного типа КС-6, радиопеленгатором для непрерывной обсервации по данным радиомаяков, воздушным датчиком скорости и навигационной РЛС с индикатором предупреждения столкновений, высотомером.
В средней части экраноплан оборудован выдвижной гидролыжей для снижения нагрузок при контакте с водной поверхностью при взлете и посадке на воду.
Реализация спасательной операции заключается в следующем. При приближении к аварийному объекту в режиме движения на экране экраноплан выполняет подлет на высоту 100-300 м, посредством поискового оборудования уточняет местонахождение аварийного объекта и возможные границы нахождения потерпевших и сбрасывает радиолокационные буи-ответчики. После осуществления посадки на воду экраноплан со скоростью 10-70 уз и более подходит к месту скопления потерпевших, ложится в дрейф и разворачивает спасательные работы путем спуска на воду спасательных средств с последующим приемом их на борт с потерпевшими при помощи посадочных пневматических устройств.
Существенным недостатком при проведении спасательных операций является то, что используются надувные спасательные средства, использование которых ограничено погодными условиями (волнение, ветер, ледовые образования). Кроме того, состав поискового и навигационного оборудования, ввиду отсутствия таких средств, как гидроакустические средства обнаружения препятствий и подводных объектов и средств измерения параметров волнения в районе посадки, существенно ограничивает возможности проведения поисково-спасательных работ посредством известного экраноплана [6].
Известно также техническое решение, направленное на спасение людей, защиту жизни спасателей, создание наиболее благоприятных условий для работы и отдыха, оказание медицинской помощи и последующее лечение, профилактику, реабилитацию последствий полученных физических, душевных травм, обеспечение культурного досуга спасенных и обслуживающего персонала, скорейшее достижение места чрезвычайного происшествия и экстренное поднятие затонувшего судна с последующей буксировкой на базу. При этом спасательное средство выполнено в виде спасательного тримаранного экраноплана (патент RU №2250845 C2, 27.04.2005 [7]).
Спасательный тримаранный экраноплан [7] содержит два многоярусных фюзеляжа большой длины, расположенные от оси симметрии напротив друг друга на некотором расстоянии, третий фюзеляж расположен на оси симметрии и несколько выступает вперед, в результате чего из носовой части кабины штурманов увеличивается обзор более чем на полкруга. Все фюзеляжи соединены между собой на определенном расстоянии друг от друга прямоугольными крыльями, причем фюзеляж должен быть соединен с не менее чем двумя крыльями, при этом одно из прямоугольных крыльев выполнено проходным с расположенным внутри него коридором сообщения для прохода в боковые фюзеляжи-корпуса. Низ каждого фюзеляжа выполнен V-образным, на котором через определенные расстояния выполнены ниши, в которых размещены выдвижные подводные крылья с изменяемой дистанционно площадью, а снизу задней части фюзеляжей выполнены соосные выдвижные гребные винты и гидродинамические рули. На хвостовой части сверху выполнены традиционно известные кили, стабилизаторы.
С наружной (внешней) стороны фюзеляжей, напротив прямоугольных крыльев, выполнены консольные стреловидные крылья с отрицательным углом, а на их концах прикреплены швартовые рейки с противоударными снаружи амортизаторами из эластичного материала, например резины, полиуретана, или из дерева. На крыше каждого фюзеляжа через определенные расстояния выполнены эвакуационно-смотровые проемы (герметичные), заполненные оргстеклом. На штурманском фюзеляже сверху на крыше носовой части установлен аэродинамический руль поворота.
На последнем (хвостовом) прямоугольном крыле, на равномерно расположенных обтекаемых кронштейнах установлены прямоточные воздушно-реактивные двигатели ПВРД, а на следующем впереди или через одно крыло установлены турбореактивные двигатели 16-ТРД.
Технико-экономические преимущества предложенного технического решения спасательного тримаранного экраноплана заключаются в следующем:
- тримаранный экраноплан при неблагоприятных погодных условиях на море более приспособлен к спасательным работам, чем любой другой спасательный летательный аппарат;
- с технической точки зрения, экраноплан с прямоугольными на одном уровне крыльями между фюзеляжами обладает большей подъемной силой над водой на единицу площади крыла и в целом на все крыло, чем всякий другой экраноплан;
- весьма важным комбинационным техническим решением является сочетание работы турбореактивных двигателей с прямоточно-воздушно-реактивными двигателями, чего нет ни на одном летательном аппарате, и это устраняет тот недостаток, что прямоточный воздушно-реактивный двигатель на нулевой скорости любого летательного аппарата не работает, пока не будет достаточного скоростного напора;
- использование подводных крыльев в режиме старта и посадки.
Однако существенным недостатком данного технического решения [7] является то, что наличие шахты для спуска и подъема СПА в днище экраноплана требует обеспечения устойчивого позиционирования, что при наличии ветра, волнения и подводных течений является трудоемкой задачей.
Кроме того, состав средств наблюдения за окружающей надводной и подводной обстановками, а также состав технических средств навигации, установленных на экраноплане, не позволяет его рассматривать как надежное спасательное средство при неблагоприятных погодных условиях, а также в районах со слабоизученными физико-географическими условиями.
Задачей предлагаемого технического решения является повышение эксплуатационных характеристик и как следствие повышение безопасности и надежности выполнения поисково-спасательных работ на море с использованием экранопланов.
Поставленная задача решается за счет того, что спасательный экраноплан, являющийся тримаранным судном и содержащий три фюзеляжа-корпуса, соединенные между собой прямоугольными крыльями, причем фюзеляж-корпус, расположенный на оси симметрии экраноплана, выдвинут вперед, киль, стреловидный стабилизатор, турбореактивные двигатели, фюзеляжи-корпуса выполнены реданными, многоярусными (многоэтажными) и разделены на герметизируемые отсеки по длине, при этом боковые фюзеляжи-корпуса выполнены удлиненными не менее чем в два раза по отношению к длине третьего фюзеляжа-корпуса, расположенного на оси симметрии экраноплана, при этом одно из прямоугольных крыльев выполнено проходным с расположенным внутри него коридором сообщения для прохода в боковые фюзеляжи-корпуса, содержащий спуско-подъемное устройство для спасательного подводного аппарата, при этом внизу реданной части каждого фюзеляжа-корпуса выполнены ниши, в которые вмонтированы выдвижные подводные крылья с площадью, изменяемой с помощью дистанционного управления, на передней верхней части фюзеляжа-корпуса, находящегося на оси симметрии экраноплана, установлен аэродинамический руль поворота, а на хвостовой части внизу двух боковых фюзеляжей-корпусов выполнены выдвижные соосные гребные винты и гидродинамические рули, средства поиска, состоящие из оптической, телевизионной, инфракрасной аппаратуры, радиолокационных станций, радиолокационных и связных пеленгаторов, прожекторов, гидроакустической системы связи, автоматизированный навигационный комплекс, включающий измерители скорости и курса, инерциальную навигационную систему, приемоиндикатор радионавигационной и спутниковой навигационной системы, автопрокладчик, совмещенный индикатор радиолокационной информации и аппроксимированной навигационной карты, радиопеленгатор для непрерывной обсервации по данным радиомаяков и навигационную РЛС с индикатором предупреждения столкновений, высотомер, в котором крайние фюзеляжи-корпуса в хвостовых оконечностях снабжены аппарелями, а палуба снабжена ролинговой дорожкой, спуско-подъемные устройства для спуска и подъема спасательного подводного аппарата выполнены в виде гидравлического устройства, средства поиска дополнительно содержат параметрический гидролокатор, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием, приемопередающие антенны которого размещены в носовой части крайних фюзеляжей-корпусов, гидроакустический параметрический профилограф, размещенный в носовой части среднего фюзеляжа-корпуса, а автоматизированный навигационный комплекс дополнительно содержит модуль гидрометеорологической информации, эхолот, совмещенный индикатор выполнен в виде электронной картографической навигационной информационной системы, высотомер выполнен в виде радиовысотомера малых высот с функциями измерителя высоты движения экраноплана и параметров морского волнения.
Как и в прототипе [7], каждый фюзеляж разделен внутри отсеками с герметизируемыми при чрезвычайных происшествиях проемами, причем два фюзеляжа большей длины расположены на некотором расстоянии друг от друга и на равном от оси симметрии, а третий фюзеляж, примерно укороченный вдвое, установлен несколько выступающим вперед двух боковых фюзеляжей, на оси симметрии экраноплана является штурманской и для всего обслуживающего персонала. Фюзеляжи соединены между собой прямоугольными крыльями под соответствующим углом атаки, причем фюзеляж, расположенный на оси симметрии, удерживается двумя проходными крыльями, во втором из них выполнен сквозной коридор для прохода в боковые фюзеляжи.
Дно каждого фюзеляжа выполнено V-образным на всю длину, а в нишах через определенные расстояния установлены выдвижные крылья.
Внизу на хвосте (корме) боковых фюзеляжей выполнены выдвижные соосные гребные винты и гидродинамические рули. На крыше (потолке) всех фюзеляжей через определенные расстояния выполнены эвакуационные смотровые проемы, заполненные органическим стеклом, а сверху среднего штурманского фюзеляжа на носовой части выполнен аэродинамический руль поворота.
С наружной стороны боковых фюзеляжей выполнены стреловидные крылья с отрицательным углом. Концы каждого стреловидного крыла соединены прочной швартовой рейкой с закрепленным с внешней стороны противоударным эластичным обтекаемым листом. А нижняя выступающая часть рейки выполняет функцию аэродинамического гребня. С целью эффективности создания большой подъемной силы при разгоне экраноплана и его эффективного торможения каждое крыло снабжено выдвижным или поворотным закрылком.
Сверху на заднем прямоугольном крыле между боковыми фюзеляжами на обтекаемых кронштейнах установлены прямоточные воздушно-реактивные двигатели (ПВРД), а впереди на следующем крыле или через одно установлены на таких же кронштейнах турбореактивные двигатели (ТРД) на одном уровне с ПВРД, но смещенные в осях на половину размера между ними. При работе ТРД создает скоростной напор, при котором при нулевой скорости может работать ПВРД, что очень важно при взлете. ПВРД не высотный. Его характеристика с подъемом на высоту уменьшается. Лучшая его характеристика только на уровне моря, поэтому оснащение экранопланов ПВРД даст наилучший эффект. Кроме того, эффект параллельных на одном уровне установленных крыльев при полете обеспечивает наибольшую подъемную силу, создавая под крылом плотный воздушный экран, захватывая и отсылая вниз под крылья толстый воздушный слой.
В отличие от прототипа [7], фюзеляжи-корпуса заявляемого экраноплана в хвостовых оконечностях снабжены аппарелями, палуба снабжена ролинговой дорожкой, спуско-подъемные устройства для спуска и подъема спасательного подводного аппарата выполнены в виде гидравлического устройства, средства поиска дополнительно содержат параметрический гидролокатор, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием, приемопередающие антенны которого размещены в носовой части крайних фюзеляжей-корпусов, и гидроакустический параметрический профилограф, размещенный в носовой части среднего фюзеляжа-корпуса, а автоматизированный навигационный комплекс дополнительно содержит модуль гидрометеорологической информации, эхолот, совмещенный индикатор выполнен в виде электронной картографической навигационной информационной системы, высотомер выполнен в виде радиовысотомера малых высот с функциями измерителя высоты движения экраноплана и параметров морского волнения.
Снабжение крайних фюзеляжей-корпусов в хвостовых оконечностях аппарелями, а палубы ролинговой дорожкой и выполнение спуско-подъемных устройств для спуска и подъема спасательного подводного аппарата в виде гидравлического устройства позволяет сократить время спуска и подъема СПА и одновременно спускать на воду два СПА. Выполнение спуско-подъемного устройства для спасательного подводного аппарата в виде гидравлического устройства упрощает операцию спуска и подъема на борт СПА.
Включение в средства поиска параметрического гидролокатора, гидролокатора шагового поиска с горизонтальным и вертикальным сканированием, приемопередающие антенны которых размещены в носовой части крайних фюзеляжей-корпусов и гидроакустического параметрического профилографа, размещенного в носовой части среднего фюзеляжа-корпуса, позволяет расширить поиск потерпевших бедствие как в слое воды, так и на морском дне.
Ввод в автоматизированный навигационный комплекс дополнительно модуля гидрометеорологической информации позволяет определить значения скорости ветра поперек взлетно-посадочной водной полосы, атмосферного давления.
Выполнение совмещенного индикатора в виде электронной картографической навигационной информационной системы позволяет осуществить движение экраноплана по заданной программе с учетом гидрометеорологических условий по трассе.
Выполнение высотомера в виде радиовысотомера малых высот с функциями измерителя высоты движения экраноплана и параметров морского волнения позволяет выбрать наиболее безопасные условия посадки и последующий взлет в районе бедствия.
Техническая реализация заявленного изобретения поясняется чертежами (фиг.1-6):
фиг.1 - спасательный тримаранный экраноплан в плане, где пунктирными линиями показаны выдвинутые закрылки;
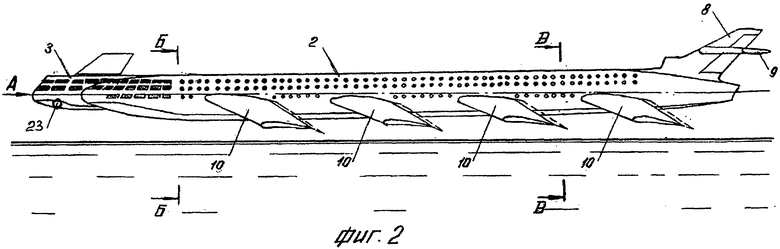
фиг.2 - вид экраноплана в полете сбоку, швартовая рейка с противоударным эластичным амортизатором, не показаны;
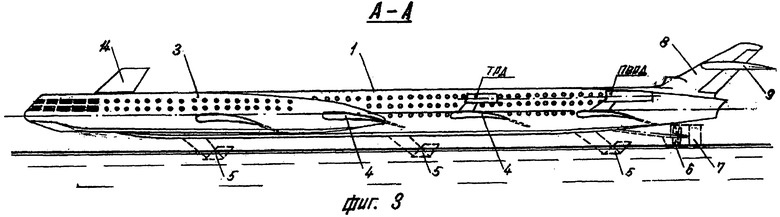
фиг.3 - продольный разрез экраноплана по А-А, пунктирными линиями показаны закрылки, выдвижные подводные крылья, выдвижные соосные гребные винты и гидродинамический руль;
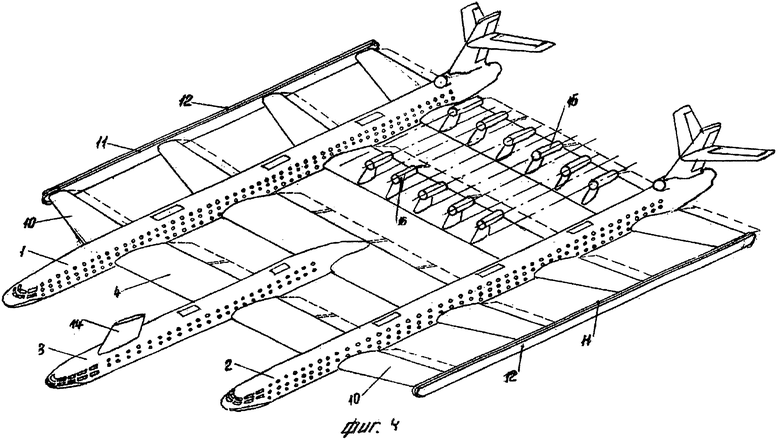
фиг.4 - аксонометрический вид экраноплана;
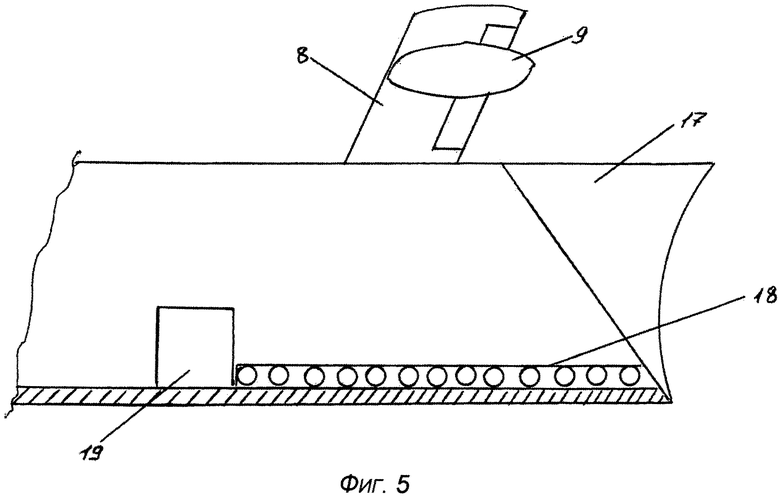
фиг.5 - хвостовая часть экраноплана;
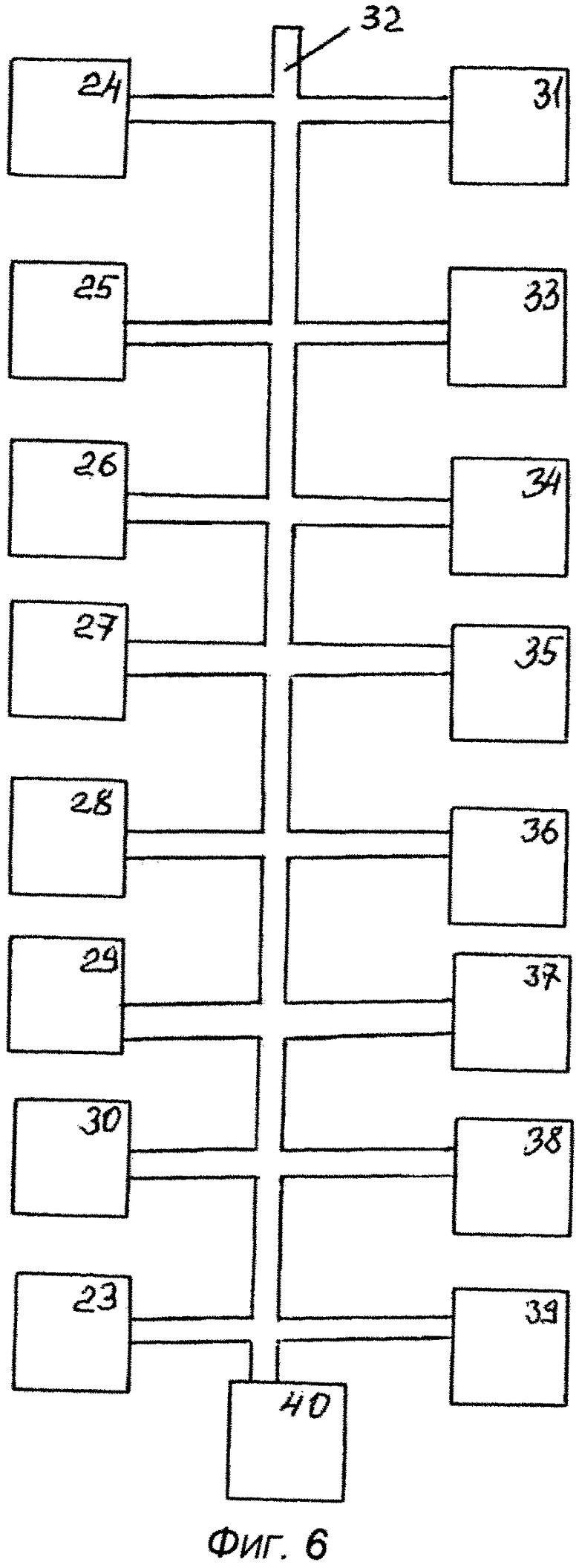
фиг.6 - блок-схема автоматизированного навигационного комплекса экраноплана.
Спасательный тримаранный экраноплан (фиг.1-4) содержит два многоярусных фюзеляжа 1, 2 большой длины, расположенные от оси симметрии напротив друг друга на некотором расстоянии, третий фюзеляж 3 расположен на оси симметрии и несколько выступает вперед, в результате чего из носовой части кабины штурманов увеличивается обзор более чем на полкруга. Все фюзеляжи соединены между собой на определенном расстоянии друг от друга прямоугольными крыльями 4, причем фюзеляж 3 должен быть соединен с не менее чем двумя крыльями. Низ каждого фюзеляжа выполнен V-образным, на котором через определенные расстояния выполнены ниши, в которых размещены выдвижные подводные крылья 5 с изменяемой дистанционно площадью, а снизу задней части фюзеляжей 1, 2 выполнены соосные выдвижные гребные винты 6 и гидродинамические рули 7. На хвостовой части сверху выполнены традиционно известные кили 8, стабилизаторы 9.
С наружной (внешней) стороны фюзеляжей 1, 2, напротив прямоугольных крыльев 4, выполнены консольные стреловидные крылья 10, а на их концах прикреплены швартовые рейки 11 с противоударными снаружи амортизаторами 12 из эластичного материала, например резины, полиуретана, или из дерева.
На крыше каждого фюзеляжа через определенные расстояния выполнены эвакуационно-смотровые проемы (герметичные) 13, заполненные оргстеклом. На штурманском фюзеляже 3 сверху на крыше носовой части установлен аэродинамический руль поворота 14.
На последнем (хвостовом) прямоугольном крыле 4, на равномерно расположенных обтекаемых кронштейнах установлены прямоточные воздушно-реактивные двигатели 15 ПВРД, а на следующем впереди или через одно крыло установлены турбореактивные двигатели 16 (ТРД).
В отличие от прототипа [7], фюзеляжи-корпуса 1, 2 в хвостовых оконечностях снабжены аппарелями 17, палуба снабжена ролинговой дорожкой 18, спуско-подъемные устройства 19 для спуска и подъема спасательного подводного аппарата выполнены в виде гидравлического устройства (фиг.5). Средства поиска дополнительно содержат параметрический гидролокатор 20, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием 21, приемопередающие антенны которых размещены в носовой части крайних фюзеляжей-корпусов 1, 2, и гидроакустический параметрический профилограф 22, размещенный в носовой части среднего фюзеляжа-корпуса 3, в которой также размещена приемопередающая антенна радиовысотомера малых высот 23 (фиг.1).
В состав средств поиска также входят известные средства из аналогов и прототипа, состоящие из оптической, телевизионной, инфракрасной аппаратуры, радиолокационных станций, радиолокационных и связных пеленгаторов, прожекторов, гидроакустической системы связи и которые на чертежах не показаны.
Параметрический гидролокатор 20 представляет собой параметрический гидролокатор, который работает в диапазоне разностных частот от 5 до 50 кГц. Причем разностная частота может изменяться в указанном диапазоне как вручную (плавно), так и автоматически от импульса к импульсу через 2, 4, 6, 8 и 10 посылок. Шаг перестройки в автоматическом режиме составляет 175 кГц. Перестройка разностной частоты может осуществляться и в течение одного импульса по линейному закону (излучение линейно-частотно-модулированных импульсов). Длительность зондирующих импульсов меняется от 0,1 до 300 мкс. Средняя частота накачки составляет 165 кГц. Ширина характеристики направленности во всем диапазоне частот постоянна и составляет 4 градуса. Гидролокатор 20 позволяет сочетать возможности бокового обзора, поиска под слоем донных осадков затонувших объектов, измерение глубины под килем экраноплана.
Параметрический профилограф 22 работает на трех фиксированных частотах 7, 10, 5 и 14 кГц. Излучение зондирующих сигналов длительностью 0,5-1 мкс обеспечивается нелинейным взаимодействием сигналов накачки с частотой 154 кГц и сигналов с частотами 147, 143,5 и 140 кГц соответственно. Ширина характеристики направленности излучающей параметрической антенны постоянна во всем диапазоне рабочих частот и составляет 2×4 градуса на уровне -3 дБ. Ширина характеристики направленности на уровне -3 дБ широкополосной приемной антенны в зависимости от рабочей частоты изменяется в пределах 10×26 градусов (на частоте 14 кГц) до 20×52 градусов (на частоте 7 кГц). Индикация эхо-сигналов в параметрическом профилографе 22 обеспечивается в цветовой гамме на экране электронного индикатора средства обработки, документирования и хранения измеренных параметров. Посредством параметрического профилографа 22 осуществляют поиск затонувших объектов.
Аналогами параметрического гидролокатора 20 и параметрического профилографа 22 являются устройства, описанные в кн. (Воронин В.А., Тарасов С.П., Тимошенко В.И. Гидроакустические параметрические системы. Ростов н/Д: Ростиздат, 2004, с.224-268).
Гидролокатор шагового поиска с горизонтальным и вертикальным сканированием 21 представляет собой двухчастотный гидролокатор, высокочастотный и низкочастотный каналы (60/153 или 85/215 кГц) встроены в один корпус и предназначены для горизонтального и вертикального сканирования, сканирования по кругу, а также комбинированного вертикального сканирования и сканирования по полному или половине круга. Аналогом является гидролокатор шагового поиска с горизонтальным и вертикальным сканированием типа СН-300.
Автоматизированный навигационный комплекс (фиг.6) содержит измеритель скорости 24, измеритель курса 25, приемоиндикатор 26 радионавигационной и спутниковой навигационных систем, автопрокладчик 27, совмещенный индикатор радиолокационной информации и аппроксимированной навигационной карты 28, выполненный в виде электронной картографической навигационной информационной системы, радиопеленгатор 29 для непрерывной обсервации по данным радиомаяков, навигационную РЛС 30, радиовысотомер малых высот 23 с функциями измерителя высоты движения экраноплана и параметров морского волнения, модуль гидрометеорологической информации 31, магистраль обмена информацией 32, навигационный пульт управления 33, вычислитель 34, блок сопряжения 35 с рулевым приводом, инерциальную навигационную систему 36, автоматическую идентификационную систему сопровождения целей 37, блок ситуационного анализа 38, эхолот 39, индикатор 40.
Высотомер 23 выполнен в виде радиовысотомера малых высот с функциями измерителя высоты движения экраноплана и параметров морского волнения, аналогами которого являются устройства, приведенные в следующих источниках (Ванаев А.П., Чернявец В.В. Определение параметров волнения совмещенной системой измерения скорости судна и высоты волн. - Судостроение, N 8-9, 1993, с.6-8. Загородников А.А. Радиолокационная съемка морского волнения. - Л.: Гидрометеоиздат, 1978, с.141-158. SU №662888 A1, 15.05.1979. SU №1788484 A1, 15.01.1993. FR №2275777 A1, 20.02.1976, RU №2137153 C1, 10.09.1999).
Посредством радиовысотомера 23 измеряется высота полета экраноплана, высота волн, курсовой угол встречи с волной, длина и период волн, в открытом море при посадке и перед взлетом.
Измеритель скорости 24 представляет собой серийный радиодоплеровский лаг РДЛ-4, предназначенный для измерения полного вектора скорости, продольной и поперечной составляющей скорости, угла дрейфа, путевого угла и пройденного расстояния относительно подстилающей поверхности во всех режимах движения экраноплана.
Измеритель курса 25 состоит из гирокомпаса, блока поправок, измерителей угловых ускорений с взаимно ортогональными осями чувствительности, ньюмометров с взаимно ортогональными осями чувствительности, вычислителя углов качки и курса. Аналогом является устройство, описанное в патенте RU №2056037. В конкретном устройстве использовано изделие по ИДТЛ 461.529.006 ТУ, а также магнитный компас.
Приемоиндикатор 26 радионавигационных и спутниковых навигационных систем состоит из антенного блока, приемоиндикатора и сетевого адаптера и обеспечивает автоматический выбор оптимального созвездия навигационной аппаратуры ГЛОНАСС и GPS, а в зоне действия РНС прием сигналов от наземных станций; интегральную оценку ожидаемой точности определения текущих координат; ввод и обработку корректирующей информации в соответствии с RTCM SC-104; решение навигационной задачи при работе в дифференциальном режиме; ввод и хранение до 500 маршрутных точек и до 50 маршрутов движения; запоминание текущих координат в качестве маршрутной точки; расчет расстояния и направления между двумя маршрутными точками движения по маршруту с выработкой параметров отклонения от маршрута; вывод координат в системе координат WGS-84, П3-90, СК-42 или в системе координат, параметры которой задаются оператором посредством навигационного пульта управления 2; выбор береговых РНС различного радиуса действия (ближнего, дальнего) и определение координат по их сигналам с оценкой точности. В конкретном устройстве применен приемоиндикатор типа NT-300. Прием и обработка сигналов системы GPS производится по пяти каналам, а системы ГЛОНАСС по трем каналам.
Автопрокладчик 27 представляет собой прокладчик курса типа GD-1920C с использованием карт типа NT МАХ стандарта С-МАР, которые поддерживают отображение навигационных знаков, приливных течений, фарватеров.
Совмещенный индикатор 28 выполнен в виде электронной картографической навигационной информационной системы.
Электронная картографическая навигационная информационная система 28 включает блок оцифровки видеосигнала, преобразователь видеосигналов, блок совмещения радиолокационной и картографической информации, модуль программного обеспечения и информационно-вычислительное устройство.
В блоке оцифровки видеосигнала производится оцифровка видеосигнала. В преобразователе видеосигналов осуществляется перевод оцифрованного видеосигнала в соответствующий масштаб и систему координат. В блоке совмещения радиолокационной и картографической информации производится наложение радиолокационного сигнала на изображение карты. В модуле программного обеспечения находится программный продукт, обеспечивающий функционирование блока совмещения радиолокационной и картографической информации, при использовании официальных картографических данных, соответствующих стандарту INO S-57, навигационных карт издания Главного управления Навигации и Океанографии МО РФ и мировых коллекций электронных навигационных карт типа C-MAP в формате СМ-93. В информационно-вычислительном устройстве осуществляется индикация электронной карты, прием, обработка и передача сообщений по стандарту NMEА-0183.
В информационно-вычислительном устройстве также выполняются вычислительные операции по формированию зоны безопасности плавания по допустимому расстоянию до навигационной опасности или по допустимому времени движения до опасности с текущей скоростью; расчету уровня приливов; трехмерному моделированию рельефа дна на основе батиметрических данных, содержащихся на текущей карте, а также по данным, измеренным эхолотом, с отображением рельефа дна; автоматизированной корректуре карт, сконвертированных из формата S-57; формированию электронного судового журнала; прогнозу положения судна; обсервованному счислению по данным, вырабатываемым НРЛС 30; расчету текущего траверзного расстояния до ориентира, определению места судна по пеленгам и дистанциям с вычислением поправок к счислимым координатам, величин и направления невязок, с вычислением радиальных среднеквадратических погрешностей обсерваций; контролю целей РЛС (дистанция кратчайшего сближения, время до кратчайшего сближения, скорость и курс цели), расчету времени прибытия в заданную точку; счислению пути судна, составлению навигационного формуляра; предварительной прокладке; расчету поправок системы координат. Информационно-вычислительное устройство построено на основе процессора Intel Core2Duo.
Радиопеленгатор 29 предназначен для непрерывной обсервации по данным радиомаяков. Навигационная РЛС 30 представляет собой двухдиапазонную радиолокационную станцию (3/10 см).
Модуль гидрометеорологической информации 31 представляет собой судовой гидрометеорологический комплекс типа «КОСМЕТЕО-К» и обеспечивает получение, обработку, регистрацию, отображение и выдачу потребителям следующей информации:
- гидрометеорологических параметров окружающей среды;
- метеорологической информации от метеорологических искусственных спутников (МИСЗ) типа «Метеор», «NOAA» в виде снимков подстилающей поверхности и облачного покрова Земли;
- факсимильной и телеграфной информации от радиометеорологических центров.
В качестве измерителя ветра в модуле гидрометеорологической информации 31 использован ультразвуковой датчик ветра ИПВ-У-АД, предназначенный для оперативного дистанционного измерения, отображения и архивации параметров ветра: скорости и направления горизонтальной и вертикальной составляющих ветра в районе посадки и взлета в открытом море. Аналогом является устройство, приведенное в описании к патенту RU №2344448.
Магистраль обмена информацией 32. Обмен информацией организован в соответствии с ГОСТ 26765.52-87. Аналогом является устройство, описанное в патенте RU №2068579. При этом реализованы протоколы обмена SRI, RS232, NMEA0183 и CAN. Магистраль обмена информацией 32 состоит из шины данных, приемника, передатчика, кодера-декодера, сетевого контроллера, блока связи с потребителями навигационной информации, формирователя сигналов, схемы ИЛИ, блока динамического приоритета.
Навигационный пульт управления 33 выполнен на основе микропроцессора со специальным программным обеспечением, позволяющим осуществлять ввод/вывод информации, преобразование сигналов от всех навигационных датчиков (приборов), например микропроцессоров семейства AVR фирмы АТМЕС. Навигационный пульт управления 33 может содержать центральный процессор, ОЗУ, ПЗУ, модульный параллельный интерфейс, устройство параллельного обмена, блок для отображения информации на электронно-лучевой трубке, блок отображения информации на газоразрядной индикаторной панели, устройство для цифровой индикации, электронно-лучевую трубку, газоразрядную индикаторную панель, цифровые индикаторы, блок управления.
Вычислитель 34 выполнен на основе DSP-процессора и предназначен для обработки сигналов по определению комплексных навигационных параметров и включает процессор, сопроцессоры, блок памяти, таймер, контроллер прерываний, порты связи.
Блок сопряжения с рулевым приводом 35 содержит приемное устройство, множитель, блок формирования восстановленного сигнала перекладки руля, блок формирования сигнала скорости перекладки руля, блок формирования модели рулевого привода, сумматоры, интеграторы, вычислитель, который собран на основе микропроцессора DSP-процессора, работающего под управлением встраиваемой операционной системы «UCLinux». Аналогом является устройство, описанное в патенте RU №2072547. Обработка сигналов осуществляется в соответствии с алгоритмами, приведенными в кн. (Управление подвижными морскими объектами / Лернер Д.М., Лукомский Ю.А., Михайлов В.А. и др. - Л.: Судостроение, 1979). Блок сопряжения 35 с рулевым приводом предназначен для формирования сигналов управления авторулевому, позволяющих осуществлять выход и стабилизацию экраноплана на маршруте с минимальным перерегулированием. Блок сопряжения с рулевым приводом 35 может функционировать с любым авторулевым, принимающим управляющие сообщения по стандарту NMEA-183 с реализацией режима стабилизации экраноплана на модифицированном маршруте. В этом режиме производится модификация исходного кусочно-прямолинейного маршрута (алгоритмы Rout Modification и Rout Preparation) путем гладкого сопряжения галсов непрерывной криволинейной траекторией, реализуемой экранопланом при назначенных ограничениях на угол перекладки руля в процессе поворота. При этом на электронной картографической навигационной информационной системе 28 отображается исходный и модифицированный маршруты с целью предоставления судоводителю предполагаемого движения экраноплана.
При прохождении маршрута вблизи зон с навигационными опасностями обеспечивается возможность корректировки как положения поворотных точек, так и изменения радиуса поворота судна путем редактирования величины предельного угла перекладки руля в каждой поворотной точке. Управление экранопланом на модифицированном маршруте осуществляется специальными алгоритмами, формирующими для авторулевого сигналы: типа ХТЕ, равный тождественному нулю, и непрерывный изменяющийся сигнал bearin to origin. Для отслеживания этих сигналов авторулевой переключается в режим Remout Control, в котором не требуется подтверждения оператором нового заданного курса. Алгоритмы управления экранопланом на траектории и модификации маршрута используют для своей работы математическую модель экраноплана, учитывающую управляющее воздействие руля, действующие на экраноплан возмущения, а также факторы, изменяющие динамику экраноплана - загрузку, изменение мощности, скорость движения. Основными алгоритмами являются алгоритмы управления рулевым приводом, стабилизации курса, маневрирования курсом, управления движением по заданному маршруту, восстановления параметров движения, адаптации законов управления движением. При этом алгоритмы обеспечивают решение таких задач, как стабилизация экраноплана на заданном курсе; управление маневрированием курсом; восстановление и фильтрация угловой скорости; адаптация параметров регуляторов авторулевого; управление движением по заданному маршруту.
Для решения данных задач на блок сопряжения 35 с рулевым приводом поступает информация о курсе и угловом ускорении с измерителя курса 25, о скорости с измерителя скорости 24, о положении руля от датчика угла перекладки руля, о положении золотника рулевой машины, принимаемом от датчика исполнительного механизма, о заданном маршруте (заданный курс, координаты места, боковое перемещение) с навигационного пульта управления 33. При этом адаптация регуляторов авторулевого производится к скорости хода, глубине моря, погодным условиям, загрузке, конкретным характеристикам экраноплана, соответствующим приведенным в лоцманской карте и таблице маневренных элементов данного экраноплана. Программное обеспечение реализовано на языке ALGOL-68.
Аппаратные средства обеспечивают независимое управление приводов каналов крена и курса, осуществляют измерение углов курса, крена и дифферента, измерение компонент векторов угловой скорости, линейного ускорения, формируют управляющие сигналы для решения целевых задач управления и стабилизации. Независимый привод каждого из каналов управления построен на основе системы привода производства компании «Faulhaber». Высокоточная цифровая система управления приводом обеспечивает высокое быстродействие, позволяет регулировать параметры привода в широком диапазоне, обеспечивает точное позиционирование по углу поворота оси привода колеса.
Микропроцессор на основе DSP-процессора является устройством, обеспечивающим программную и аппаратную интеграцию отдельных блоков, входящих в состав аппаратных средств авторулевого. Микропроцессор позволяет выполнять операции над 32-разрядными числами в формате с плавающей запятой, что обеспечивает точность вычислений, достаточную для решения большинства задач управления и навигации. Тактовая частота процессора составляет 400 МГц. Помимо процессора в состав платы вычислительно-управляющего модуля входят микросхемы памяти SDRAM, микросхемы памяти flash, микросхемы интерфейсов ввода-вывода.
Инерциальная навигационная система 36 состоит из бесплатформенного инерциального измерительного модуля на волоконно-оптических гироскопах, микроакселерометров и микровычислителя и соединена своим входом через магистраль обмена 32 с выходом приемоиндикатора 26 радионавигационных и спутниковых навигационных систем для выработки поправок к углам курса. Инерциальная навигационная система 36 определяет углы курса, крена и дифферента, обеспечивает систему управления инерциальной и навигационной информацией.
Автоматическая идентификационная система сопровождения целей 37 включает приемник типа FA-30 и транспондер типа FA-150 и предназначена для одновременного сопровождения до 100 целей. Исходные данные включают в себя координаты, курс и скорость относительно грунта, что дает возможность заранее рассчитать изменения курса интересующих целей, в том числе крупных ледовых полей и айсбергов.
Блок ситуационного анализа 38 построен на основе процессора Intel Core2Duo.
При плавании в стесненных навигационных обстоятельствах, при подходе к таким районам получают спутниковые данные высокого разрешения типа ASTER или SRTM данного района плавания, по которым посредством программ моделирования водной поверхности типа Hydrax, атмосферных и астрономических явлений типа Skyx производится рендеринг окружающей обстановки, посредством программы PhysX восстанавливают топологию корпуса судна путем построения цифровой модели корпуса судна по сечениям корпуса судна по шпангоутам, моделируют динамику судна при прохождении района со стесненными обстоятельствами плавания, включая ледовые поля и айсберги, с учетом волнового и ветрового воздействия.
Эхолот 39 представляет собой многолучевой эхолот со сложным линейно-частотным модулированным сигналом и предназначен для измерения глубин от 20 до 6000 м. Развертка мощности принятых сигналов осуществляется по дальности и углу. Характер изменения мощности в луче с дальностью зависит от формы рельефа дна. Из 32 приемных каналов формируют 256 лучей, что позволяет получить квазинепрерывный профиль рельефа. Приемная антенна многолучевого эхолота 3 диапазона частот 30 кГц состоит из 32 элементов. Эхолот 39 выполнен с двухчастотным излучением 50/200 кГц с функцией различения эхосигналов.
Индикатор 40 представляет собой многофункциональный дисплей морского исполнения с диапазонами входов RGB, цифровые видеоинтерфейсы DVI-D, 3NTSC/PAL и т.п. Возможно также подключение выносных функциональных индикаторов.
Автоматизированный навигационный комплекс работает следующим образом.
Датчики автономной навигационной информации вырабатывают сигналы, несущие информацию о скорости судна, угле дрейфа, составляющих вектора скорости, пройденном расстоянии, путевом угле, курсе, углах качки, линейных и угловых скоростей и ускорений, координатах, дистанции и пеленге до навигационных ориентиров и опасностей, глубине под килем, траекторию движения судна. Эти сигналы поступают через магистраль обмена информацией 32 на вычислитель 34, где выполняется решение основной навигационной задачи по определению места экраноплана в зависимости от условий плавания и степени достоверности, выработанной этими датчиками, а также выполняются вычисления для обеспечения стабилизации движения экраноплана на заданном курсе и линии заданного пути. С вычислителя 34 сигналы поступают на навигационный пульт управления 33 через магистраль обмена информацией 32 и на электронную картографическую навигационную систему 28, где отображается исходный и модифицированный маршруты. На электронную картографическую навигационную систему 28 поступает также информация с эхолота 39 и НРЛС 30.
Посредством приемоиндикатора 26, принимающего сигналы, излучаемые береговыми и космическими навигационными системами, определяют обсервованные координаты, вектор путевой скорости и курс путем приема и обработки сигналов в диапазоне частот 10-14 кГц, 70-130 кГц, 399,968 МГц, 1227,6-1575,42 МГц, 149,988 МГц, 1,6-5 МГц, а также восстанавливают траекторию движения экраноплана. В зоне действия береговых дифференциальных станций прием сигналов осуществляется от этих станций, что позволяет определять обсервованные координаты с точностью до 10 м при благоприятных геометрических параметрах нахождения высокоскоростного судна, каким является экраноплан, относительно береговых станций.
В качестве СПА могут быть использованы как обитаемые, так телеуправляемые серийные подводные аппараты, оснащенные соответствующей аппаратурой для ориентации и позиционирования, а также необходимым оборудованием для выполнения подводных спасательных работ. Например, при проведении спасательной операции с объекта, находящегося на грунте, с прибытием в заданный район экраноплан движется в режиме на подводных крыльях. Поиск объектов потерпевших бедствие осуществляется в водоизмещающем положении и при нахождении в дрейфе посредством средств поиска, включающих параметрический гидролокатор 20, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием 21, гидроакустический параметрический профилограф 22. В этот период с помощью гидроакустической системы может быть установлен контакт с подводным объектом на грунте. После спуска с экраноплана и погружения СПА садится на комингс-площадку аварийного объекта на грунте, принимает спасенных и всплывает с ними на поверхность.
Технико-экономические преимущества предложенного технического решения спасательного тримаранного экраноплана заключаются в следующем:
- наличие аппарели и палубы с ролинговой дорожкой в крайних фюзеляжах-корпусах в хвостовых оконечностях существенно снижает трудозатраты при спуске и подъеме на борт СПА, а также позволяет одновременно спускать на воду два СПА;
- спуско-подъемные устройства для спуска и подъема спасательного подводного аппарата, выполненные в виде гидравлического устройства, в сочетании с ролинговой дорожкой существенно снижают энергопотребление;
- средства поиска, дополнительно содержащие параметрический гидролокатор, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием, приемопередающие антенны которого размещены в носовой части крайних фюзеляжей-корпусов, гидроакустический параметрический профилограф, размещенный в носовой части среднего фюзеляжа-корпуса, позволяют существенно расширить район поиска объектов, потерпевших бедствие;
- автоматизированный навигационный комплекс, благодаря вводу новых элементов с образованием новых информационных связей, использованию алгоритмов управления экранопланом на маршруте и алгоритмов обработки навигационной информации, имеющей малопересекающиеся области энергетических спектров, обеспечивает оптимальное управление экранопланом и позволяет повысить точность определения основных навигационных параметров, степень автоматизации управления экранопланом с одновременным повышением информативности и надежности при следовании в район бедствия;
- тримаранный экраноплан при неблагоприятных погодных условиях на море более приспособлен для проведения поисково-спасательных работ, чем любой другой спасательный летательный аппарат.
Источники информации
1. Белавин Н.И. Экранопланы. Судостроение. Л.: 1977, с.154-156.
2. Патент US №178967688 A, 16.05.1972.
3. Авторское свидетельство SU №1786768 A1, 27.07.1996.
4. Авторское свидетельство SU №643382 A1, 28.01.1979.
5. Патент RU №2019456 C1, 15.09.1994.
6. Поисково-спасательный экраноплан «Спасатель» / А.И. Денисов // Судостроение, №1, 1995, с.9-12.
7. Патент RU №2250845 C2, 27.04.2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПАСАТЕЛЬНЫЙ ТРИМАРАННЫЙ ЭКРАНОПЛАН Н.Р.ЯНСУФИНА | 2001 |
|
RU2250845C2 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 1990 |
|
RU2019456C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Воздушная транспортная система | 2021 |
|
RU2764036C1 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
Изобретение относится к морским летательным аппаратам и касается экранопланов, использующихся при поисково-спасательных работах. Спасательный экраноплан является тримаранным судном и содержит три фюзеляжа-корпуса, соединенные между собой прямоугольными крыльями. Центральный фюзеляж-корпус выдвинут вперед. Крайние фюзеляжи-корпуса в хвостовых оконечностях снабжены аппарелями, а палуба снабжена ролинговой дорожкой. Спуско-подъемные устройства для спуска и подъема спасательного подводного аппарата выполнены в виде гидравлического устройства. На экраноплане установлен автоматизированный навигационный комплекс, в состав которого входит модуль гидрометеорологической информации, эхолот, совмещенный индикатор, выполненный в виде электронной картографической навигационной информационной системы, высотомер, выполненный в виде радиовысотомера малых высот с функциями измерителя высоты движения экраноплана и параметров морского волнения. В состав средств поиска входит параметрический гидролокатор, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием, приемопередающие антенны которого размещены в носовой части крайних фюзеляжей-корпусов, гидроакустический параметрический профилограф, размещенный в носовой части среднего фюзеляжа-корпуса. Достигается повышение эксплуатационных характеристик, безопасности и надежности выполнения поисково-спасательных работ на море. 6 ил.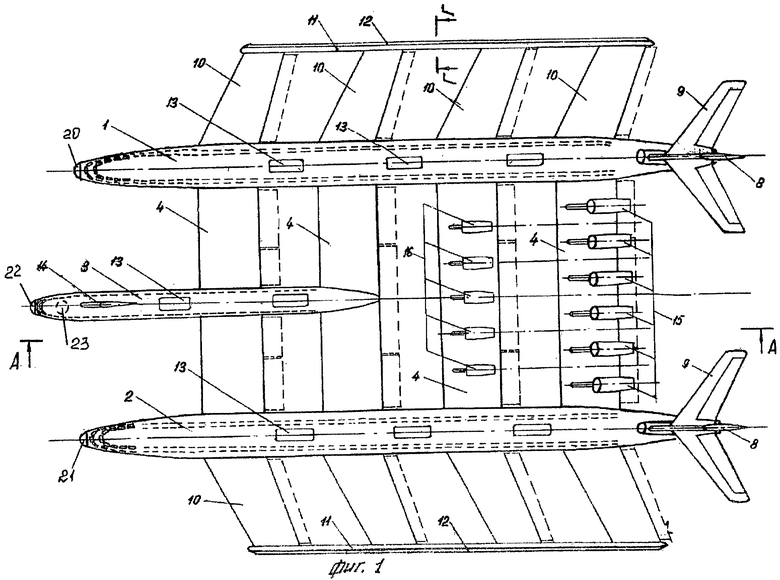
Спасательный экраноплан, являющийся тримаранным судном и содержащий три фюзеляжа-корпуса, соединенные между собой прямоугольными крыльями, причем фюзеляж-корпус, расположенный на оси симметрии экраноплана, выдвинут вперед, киль, стреловидный стабилизатор, турбореактивные двигатели, фюзеляжи-корпуса выполнены реданными, многоярусными (многоэтажными) и разделены на герметизируемые отсеки по длине, при этом боковые фюзеляжи-корпуса выполнены удлиненными не менее чем в два раза по отношению к длине третьего фюзеляжа-корпуса, расположенного на оси симметрии экраноплана, при этом одно из прямоугольных крыльев выполнено проходным с расположенным внутри него коридором сообщения для прохода в боковые фюзеляжи-корпуса, содержащий спуско-подъемное устройство для спасательного подводного аппарата, при этом внизу реданной части каждого фюзеляжа-корпуса выполнены ниши, в которые вмонтированы выдвижные подводные крылья с площадью, изменяемой с помощью дистанционного управления, на передней верхней части фюзеляжа-корпуса, находящегося на оси симметрии экраноплана, установлен аэродинамический руль поворота, а на хвостовой части внизу двух боковых фюзеляжей-корпусов выполнены выдвижные соосные гребные винты и гидродинамические рули, средства поиска, состоящие из оптической, телевизионной, инфракрасной аппаратуры, радиолокационных станций, радиолокационных и связных пеленгаторов, прожекторов, гидроакустической системы связи, автоматизированный навигационный комплекс, включающий измерители скорости и курса, инерциальную навигационную систему, приемоиндикатор радионавигационной и спутниковой навигационной системы, автопрокладчик, совмещенный индикатор радиолокационной информации и аппроксимированной навигационной карты, радиопеленгатор для непрерывной обсервации по данным радиомаяков и навигационную РЛС с индикатором предупреждения столкновений, высотомер, отличающийся тем, что крайние фюзеляжи-корпуса в хвостовых оконечностях снабжены аппарелями, а палуба снабжена ролинговой дорожкой, спуско-подъемные устройства для спуска и подъема спасательного подводного аппарата выполнены в виде гидравлического устройства, средства поиска дополнительно содержат параметрический гидролокатор, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием, приемопередающие антенны которого размещены в носовой части крайних фюзеляжей-корпусов, гидроакустический параметрический профилограф, размещенный в носовой части среднего фюзеляжа-корпуса, а автоматизированный навигационный комплекс дополнительно содержит модуль гидрометеорологической информации, эхолот, совмещенный индикатор, выполненный в виде электронной картографической навигационной информационной системы, высотомер, выполненный в виде радиовысотомера малых высот с функциями измерителя высоты движения экраноплана и параметров морского волнения.
| СПАСАТЕЛЬНЫЙ ТРИМАРАННЫЙ ЭКРАНОПЛАН Н.Р.ЯНСУФИНА | 2001 |
|
RU2250845C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ЭКРАНОПЛАН-АМФИБИЯ НА ВОЗДУШНОЙ ПОДУШКЕ | 2003 |
|
RU2211773C1 |
| US 3216673 A, 09.11.1965 | |||

