Изобретение относится к области технических средств судовождения, предназначенных для автоматической проводки судна по заданному курсу, оси фарватера (судового хода) или по заданной траектории движения.
Известны авторулевые (патенты: RU 2224279 C1, 20.02.2004 [1], RU 2207585 C2, 27.06.2003 [2], RU 2260191 C1, 10.09.2005 [3], US 5523951 A, 04.06.1996 [4], US 5179385 A, 12.01.1993 [5], US 4513378 A, 23.04.1985 [6]), которые содержат блок управления с панелями управления, датчик обратной связи, переключатель режимов управления, при этом к входу блока управления подключены выходы электронной картографической навигационно-информационной системы, приемоиндикатора спутниковой навигационной системы GPS, лага, рулевого колеса и гидравлического устройства управления рулем, а выход блока управления соединен с входом рулевой машины, выход которой через датчик обратной связи соединен с входом блока управления.
В существующих образцах авторулевых отсутствуют подходы по формальному определению параметров управления движением судна удоп и автоматическому вводу этого значения в блок формирования закона управления рулем. Величина удоп рассчитывается и вводится в блок формирования закона управления рулем вручную.
Таким образом, недостатками известных авторулевых судна является то, что не обеспечивается автоматизированное определение и учет допустимого бокового отклонения судна от заданной траектории движения (оси судового хода, фарватера, рекомендованного курса и т.п.), зависящего от ширины судового хода, габаритов судна и суммарного сноса последнего под воздействием ветра и течения.
Это вызывает необходимость с изменением условий плавания периодического отвлечения вахтенного помощника капитана на производство соответствующих расчетов и ручного ввода искомой величины (допустимого бокового отклонения судна) в авторулевой, что, в конечном счете, снижает навигационную безопасность плавания судна, а также делает невозможной автоматизацию процесса судовождения.
Известен также авторулевой судна (патент RU №2410282), в котором к известному авторулевому судна, содержащему блок управления с панелями управления, датчик обратной связи, переключатель режимов управления, при этом на вход блока управления подключены выходы электронной картографической навигационно-информационной системы, приемоиндикатора спутниковой навигационной системы GPS, лага, рулевого колеса и гидравлического устройства управления рулем, а выход блока управления соединен с входом рулевой машины, выход которой через датчик обратной связи соединен с входом блока управления, дополнительно подсоединен блок определения допустимого бокового отклонения судна от заданной траектории его движения, при этом вход данного блока подключен к выходам приемоиндикатора спутниковой навигационной системы GPS и электронной картографической навигационно-информационной системы, и выход которого подключен к входу блока управления, что позволяет расширить функциональные возможности существующего авторулевого за счет автоматизированного определения и учета допустимого бокового отклонения судна от заданной траектории движения, увеличения степени автоматизации процесса судовождения, исключения до минимума негативного влияния так называемого «человеческого фактора» в экстремальных условиях и повышения навигационной безопасности плавания судна. Однако для оценки навигационной безопасности плавания крупных судов, перевозящих опасные грузы (танкеры, суда для перевозки газа и продуктов химического производства) на подходах к портам и при плавании в узкостях, необходимо определить обобщенный показатель навигационной безопасности плавания (НБП).
Под опасностью для судна понимается любой фактор, который приводит к потере судном его функционального предназначения - находиться на плаву или осуществлять движение в водной среде.
Важнейшими из этих факторов с точки зрения морской навигации могут считаться глубины моря и стесненные условия, ограничивающие свободу маневра или движения судна. Очевидно, что в любом случае глубина моря под килем или по пути движения судна не может быть (для надводных кораблей и судов) меньше осадки судна. Однако условие Нм>Тс, где Нм - гарантированная глубина моря под килем судна в точке измерения или по линии его пути; Тс - максимальная осадка судна, не является гарантией безопасного в навигационном отношении плавания судна.
Судно является динамическим объектом, имеющим габаритные размеры и находящимся в состоянии динамического равновесия относительно поверхности водной среды. Поэтому касание грунта может произойти вследствие наличия статического или динамического крена или дифферента судна, отстояния точки измерения глубины места от точки касания, влияния волнения, изменения плотности воды и др.
Кроме того, поскольку траектория движения и курс судна могут не совпадать ввиду наличия течения и дрейфа, на циркуляции и т.п., а длина и ширина судна могут быть значительными, необходимо оценивать глубины не только по линии траектории движения судна, а в определенной полосе движения.
Таким образом, одним из основных условий обеспечения НБП является отсутствие опасных глубин в полосе движения судна.
При этом в качестве безопасной должна рассматриваться глубина, превышающая осадку судна на необходимую величину запаса, учитывающего ранее перечисленные динамические характеристики и габариты судна, а в качестве безопасной ширины - ширина, превышающая ширину судна на величину запаса, учитывающего линейные размеры и возможное несовпадение линии курса с диаметральной плоскостью, рысканием на курсе и т.д., то есть:

где U, V, W, Θ, … - совокупность внешних условий, определяющих величины запасов ΔH (глубины), ΔB (ширины), которые являются условиями навигационной безопасности плавания по заданной траектории.
Для оценки навигационной безопасности плавания судов на путях движения, подходах и непосредственно на акватории портов нормативы, приведенные в руководящих документах по проектированию подходных каналов, фарватеров и элементов акватории портов не в полной мере соответствуют понятиям навигационной безопасности, заложенной в Резолюциях ИМО.
Как правило, приведенные нормативы не учитывают (или не в полной мере учитывают) погрешности определения места центра тяжести судна, полученные по данным навигационного оборудования, а также погрешности нанесения «навигационных опасностей» на морские навигационные карты при их составлении, графические погрешности нанесения места судна на морские навигационные карты, погрешности «нуля глубин», принятых для морских навигационных карт и т.д.
Минимально допустимая безопасная навигационная глубина на морской навигационной карте на подходных каналах может быть определена в соответствии с выражением (РД 31.31.47-88):
 ,
,
где T - осадка расчетного судна в грузу;
ΔT - поправка на изменение осадки расчетного судна при плотности ρ (солености, ‰) воды в районе плавания, отличающейся от стандартной ρ=1025 кг/м3;
ΔH - максимальное отклонение уровня моря от указанного на морской навигационной карте, м;
Z1 - минимальный навигационный запас глубины, необходимый для обеспечения управляемости судна, м. Определяется в зависимости от вида грунта;
Z2 - волновой запас глубины на погружение оконечности судна при волнении, м.
Рассчитывается исходя из расчетной высоты волны hb 3% обеспеченности, курсового угла волнения qb, длины судна L и числа Фруда  .
.
В случае перевозки опасного груза величина hbоп=1.4 hb. Расчет производится с использованием специальных номограмм;
Z3 - скоростной запас глубины на изменение осадки судна на ходу на тихой воде по сравнению с осадкой без хода, м. Определяется по специальным номограммам в зависимости от осадки судна Тпр, числа Фруда и суммарного навигационного запаса  ;
;
Z4 - запас на крен судна, возникающий от воздействия расчетного ветра и гидродинамических сил на повороте, м; определяется в зависимости от типа судна и его измерений;
Z5 - запас глубины на заносимость.
Подходной канал или фарватер можно считать безопасным в навигационном отношении, если на его акватории отсутствуют глубины, равные или менее Hmin.
Ось подходного канала или фарватера должна находиться в области навигационной безопасности плавания (ОНБП).
Область навигационной безопасности плавания (ОНБП) определяется по следующему алгоритму. Рассчитываются значение глубины, являющееся для судов заданных размерений навигационной опасностью. Вокруг точек с рассчитанной глубиной и других навигационных опасностей, обозначенных на карте, проводятся окружности с радиусами безопасной дистанции до опасностей. Площадь акватории, ограниченная этими окружностями, определяет зону, опасную в навигационном отношении, за границей которой судно гарантированно (P=0.95) не совершит навигационное происшествие, связанное с касанием грунта или навалом на гидротехническое сооружение.
Безопасной дистанцией до навигационных опасностей принимается значение проектной ширины канала, определенное в соответствии с РД 31.31.47-88 для подходного канала или полосы безопасного движения конкретного судна, определяемое в соответствии с РД 31.63.01-83 г, для фарватера с учетом точности знания места центра тяжести судна, которое определяется по техническим средствам судовой или береговой системы навигационного оборудования и точности нанесения на морские навигационные карты глубин, являющихся для судов заданных размерений навигационными опасностями.
Если ось канала или фарватера находится в ОНБП, то такой канал или фарватер может считаться безопасным в навигационном отношении для судов заданных размерений. В соответствии с требованиями нормативных документов по проектированию портов (РД 31.3.05-97) минимально допустимую расчетную глубину на морской навигационной карте в месте нахождения кораблей можно определить выражением:

где T - осадка. В наших расчетах соответствует осадке судна в соответствии с исходными данными;
ΔH - максимальное отклонение уровня моря от указанного на морской навигационной карте, м;
Z1 - минимальный навигационный запас глубины, м. Определяется в зависимости от вида грунта в интервале от H до H+0,5 м;
Z2 - волновой запас глубины, м. Рассчитывается исходя из расчетной высоты волны hb 3% обеспеченности, курсового угла волнения qb, длины судна L и числа Фруда  ;
;
Z3 - скоростной запас глубины, м. Определяется по специальным номограммам в зависимости от осадки судна Тпр, числа Фруда и суммарного навигационного запаса  . Ширина полосы безопасного движения Вбд при одностороннем движении определяется выражением:
. Ширина полосы безопасного движения Вбд при одностороннем движении определяется выражением:
 ,
,
где Вм - ширина маневровой полосы, м; В - ширина корабля, м;
 ,
,
где L - длина судна, м; α1 - угол сноса, град;
α2 - угол дрейфа, град;
tsinβ - принимается равным 3 с;
V - скорость корабля, м/с.
Таким образом, расчет условий отсутствия навигационного происшествия осуществляется применительно к рассматриваемым условиям для данного судна. При этом для расчета должны использоваться максимальные значения статистических параметров с наиболее неблагоприятных направлений относительно выбранных курсов движения корабля (ΔH, hb, α1, α2, qb и др.).
Входной рейд должен иметь размеры и очертание в плане, которые дают возможность при сильном ветре осуществлять любые маневры, требующиеся при входе или выходе судна из порта, в частности:
- возможность гашения инерции входящего судна;
- возможность разворота судна собственными средствами на требуемый угол по дуге циркуляции;
- возможность отдачи якоря и временной аварийной стоянки.
Указанные требования должны соблюдаться при условии: если на площади входного рейда может быть вписана окружность диаметром, равным не менее D=3,5Lc, где Lc - длина расчетного судна.
Минимальное расстояние прямолинейного участка по оси входа в конкретных случаях может быть увеличено до 4,5 Lc с учетом маневренных характеристик расчетных судов, а также гидрометеорологических условий (ледовый режим, течения, ветер) проектируемого порта.
Задачей предлагаемого технического решения является расширение функциональных возможностей судового авторулевого.
Поставленная задача решается за счет того, что в авторулевом судна, содержащем блок управления с панелями управления, датчик обратной связи, переключатель режимов управления, при этом выходы рулевого колеса, гидравлического устройства управления рулем и электронной картографической навигационно-информационной системы подключены к входу блока управления через переключатель режимов управления, приемоиндикатор спутниковой навигационно-информационной системы подключен на вход электронной картографической навигационно-информационной системы, а выход блока управления соединен с входом рулевой машины, выход которой через датчик обратной связи соединен с входом блока управления, в котором дополнительно подсоединен блок определения допустимого бокового отклонения судна от заданной траектории его движения, при этом вход данного блока подключен к выходам приемоиндикатора спутниковой навигационной системы GPS и электронной картографической навигационно-информационной системы, и выход которого подключен к входу блока управления, в который дополнительно введены инерциальная навигационная система, панорамная гидроакустическая система, содержащая эхолот с двумя характеристиками направленности, два гидролокатора бокового обзора с переключаемой характеристикой направленности, параметрический профилограф, выход которой соединен с еще одним входом блока управления с панелями управления, инерциальная система своими входами соединена с выходом приемоиндикатора спутниковой навигационной системы и выходом лага соответственно, а своим входом-выходом соединена с еще одним входом блока управления.
В состав панорамной гидроакустической системы входят эхолот с двумя характеристиками направленности, два гидролокатора бокового обзора с переключаемой характеристикой направленности, параметрический профилограф, цифровой блок обработки сигналов и цветной дисплей. Цифровой блок обработки своими входами соединен с выходами эхолота, гидролокаторов бокового обзора, профилографом, приемоиндикатора спутниковой навигационной системы GPS, электронной картографической навигационно-информационной системы и цветным дисплеем, а своим выходом соединен с блоком управления с панелями управления.
Пример реализации заявляемого технического решения.
Фиг.1. Блок-схема авторулевого судна. Блок-схема включает блок управления 1, в котором находятся устройство формирования закона управления рулем 2 и усилительно-преобразующее устройство 3, рулевая машина (исполнительный механизм ИМ) 4, датчик обратной связи 5, инерциальная навигационная система 6, блок определения допустимого бокового отклонения судна от заданной траектории движения (адаптивный вычислитель АВ) 9. Усилитель и рулевая машина через датчик обратной связи 5 охвачены внутренней отрицательной обратной связью и образуют следящую систему управления рулем. Ее назначение - обеспечить перекладку руля в соответствии с заданным значением угла перекладки руля, выработанным в устройстве формирования закона управления.
При этом к входу блока управления подключены через переключатель режимов управления 14 выходы рулевого колеса 12 и гидравлического устройства управления рулем 13, электронной картографической навигационно-информационной системы 7, на входы которой подключены приемоиндикатор спутниковой навигационной системы GPS 8, лага 11, а выход блока управления 1 соединен с входом рулевой машины 4, выход которой через датчик обратной связи 5 соединен с входом блока управления 1, вход блока определения допустимого бокового отклонения судна от заданной траектории движения 9 подключен к выходам приемоиндикатора спутниковой навигационной системы GPS 8 и электронной картографической навигационно-информационной системы 7, и выход которого подключен к входу блока формирования закона управления 2. Панорамная гидроакустическая система 15 включает эхолот 16 с двумя характеристиками направленности, два гидролокатора 17 бокового обзора с переключаемой характеристикой направленности, параметрический профилограф 18, цифровой блок обработки сигналов 19 и цветной дисплей 20. Цифровой блок обработки сигналов 19 своими входами соединен с выходами эхолота 16, гидролокаторов 17 бокового обзора, профилографа 18, приемоиндикатора спутниковой навигационной системы GPS 8, электронной картографической навигационно-информационной системы 7 и цветным дисплеем 20, а своим выходом соединен с блоком управления 1 с панелями управления. Магнитный компас 10, инерциальная навигационная система 6.
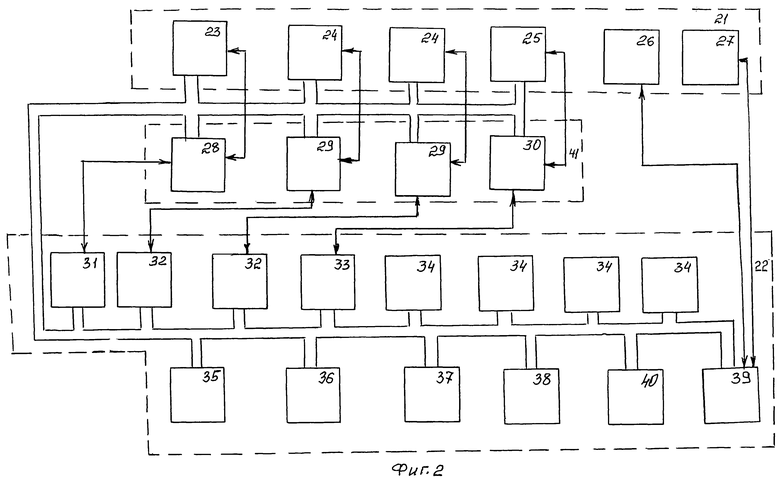
Фиг.2. Структурная схема панорамной гидроакустической системы. Панорамная гидроакустическая система 15 состоит из забортной части 21, генератора зондирующих импульсов 41, приемника эхосигналов 22.
Забортная часть 21 включает в себя антенну 23 эхолота 16, антенны 24 гидролокаторов 17 бокового обзора правого борта и левого бортов, антенну накачки 25 параметрического профилографа 18. Кроме того, в забортной части размещаются датчики температуры 26 и солености 27, по измеренным значениям которых определяют скорость звука в водной среде на горизонте излучающих и принимающих антенн гидроакустических средств для ввода соответствующих поправок.
Генератор зондирующих импульсов 41 содержит излучающие тракты 28 эхолота 16, излучающие тракты 29 гидролокаторов 17 бокового обзора правого и левого бортов, генераторы накачки 30 параметрического профилографа 18.
Приемник эхосигналов 21 содержит приемные тракты 31 эхолота 16, приемные тракты 32 гидролокаторов 17 бокового обзора правого и левого бортов, приемный тракт 33 высокочастотного профилографа 18, четыре сигнальных процессора 34, предназначенных для преобразования аналоговых сигналов в цифровую форму и первичной обработки этих сигналов, интерфейс связи 35 между различными частями системы, схему управления 36, формирователь сигналов 37, схему временной автоматической регулировки усиления 38 и преобразователь сигналов датчиков 39. Кроме того, в приемник эхосигналов входит схема проверки параметров системы 40. Тракты и схемы связаны между собой линями связи двух типов: сигнальными, представляющими собой витые экранированные пары, и управления по внутренней локальной сети и через соответствующие разъемы.
Максимальная дальность до целей, которая в условиях мелкого моря определяется не столько энергетикой, сколько условиями распространения с учетом границ, составила 30-40 м, хотя исходя из геометрии (высота антенной системы над поверхностью дна 2,5 м, угол наклона антенны 25 градусов, ширина характеристики направленности антенны в вертикальной плоскости 50 градусов, ожидаемая дальность в 2-3 раза меньше).
Технические характеристики эхолота 16, гидролокатора бокового обзора 17 и параметрического профилографа 18 приведены в табл.1.
Эхолот 16 представляет собой многолучевой эхолот типа «R2Sonic 2022» с центральным лучом 1 градус.
Высокочастотный профилограф 18 представляет собой профилограф с линейно-частотной модуляцией типа «Chirp».
Гидролокаторы бокового обзора 17 представляют собой батиметрический гидролокатор типа «Benthos C3D» с шириной полосы обзора 1,2 км.
Блок управления 1 выполнен на основе микропроцессора со специальным программным обеспечением, позволяющим осуществлять ввод/вывод информации и преобразование сигналов от нескольких навигационных датчиков (приборов), например микропроцессоров семейства AVR фирмы АТМЕС.
Блок определения допустимого бокового отклонения 2 судна от заданной траектории выполнен на основе микропроцессора DSP - процессора, работающего под управлением встраиваемой операционной системы «UCLinux».
Аппаратные средства блока управления 1 обеспечивают независимое управление приводов каналов крена и курса, осуществляют измерение углов курса, крена и дифферента судна, измерение компонент векторов угловой скорости, линейного ускорения, формируют управляющие сигналы для решения целевых задач управления и стабилизации.
Независимый привод каждого из каналов управления построен на основе системы привода производства компании «Faulhaber». Высокоточная цифровая система управления приводом обеспечивает высокое быстродействие, позволяет регулировать параметры привода в широком диапазоне, обеспечивает точное позиционирование по углу поворота оси привода колеса.
Инерциальная навигационная система 6 определяет углы курса, крена и дифферента, обеспечивает систему управления инерциальной и навигационной информацией.
Микропроцессор на основе DSP-процессора является устройством, обеспечивающим программную и аппаратную интеграцию отдельных блоков, входящих в состав аппаратных средств авторулевого. Микропроцессор позволяет выполнять операции над 32-разрядными числами в формате с плавающей запятой, что обеспечивает точность вычислений, достаточную для решения большинства задач управления и навигации. Тактовая частота процессора составляет 400МГц. Помимо процессора в состав платы вычислительно-управляющего модуля входят микросхемы памяти SDRAM, микросхемы памяти flash, микросхемы интерфейсов ввода-вывода. Такое построение системы авторулевого позволяет решать в реальном времени сложные вычислительные задачи, большой объем оперативной памяти системы позволяет осуществлять реализацию ресурсоемких алгоритмов.
Различные компоненты системы управления и навигации подключены к блоку определения допустимого бокового отклонения 2 судна от заданной траектории с помощью последовательных синхронных и асинхронных портов ввода-вывода. Контроллеры привода каналов управления подключены к модулю с помощью асинхронных портов ввода-вывода UART0 и UART1. С помощью данных интерфейсов контроллерам передаются команды, задающие режимы движения валов, а контроллеры, в свою очередь, обеспечивают информацией об угловом положении валов, токах в двигателях, скорости вращения.
Инерциальная навигационная система 6 подключена к вычислительному устройству блока управления с помощью синхронного последовательного порта SPORT. Вывод данных, а также управление оператором осуществляется с помощью блока, реализующего двунаправленный канал передачи данных, подключенного к вычислительно-управляющему модулю с помощью асинхронного интерфейса UART2. Все операции обмена между модулем и периферийными устройствами осуществляются с помощью использования механизмов DMA (прямого доступа к памяти), что позволяет несмотря на интенсивность операций обмена данными разгрузить ядро цифрового сигнального процессора.
Ввод в состав измерительной аппаратуры инерциальной навигационной системы 6 позволяет выполнять инерциальное счисление судна с вводом начальных и последующих определений места судна по спутниковой навигационной системе и исключить из состава измерительной аппаратуры гирокомпас, а вместо него использовать магнитный компас 10.
Для управления ориентацией судна вокруг одной оси используется система привода, состоящая из двигателя постоянного тока с редуктором и магнитным энкодером и системы управления. Двигатель постоянного тока типа «Faulhaber» имеет конструкцию с полым ротором, что дает ряд преимуществ, таких как: низкое энергопотребление, отсутствие потерь в сердечнике ротора, низкое напряжение трогания, малый момент инерции ротора, позволяющие быстрые разгон и торможение, низкие массогабаритные показатели. В составе привода использован редуктор типа «Faulhaber» в исполнении со стальными шестернями для обеспечения повышенной износоустойчивости. Магнитный энкодер IE-512 обеспечивает высокое разрешение в 512 линий на оборот, что позволяет осуществлять плавное и высокоточное управление приводом.
В цифровом контроллере MCDC3003 в качестве вычислителя используется цифровой сигнальный процессор, что позволяет осуществлять высокоточное и высокоскоростное управление (0.18° - ошибка по углу, частота работы следящего контура - 100 Гц). Цифровой контроллер привода принимает по интерфейсу UART поступающие от блока управления команды. Режимы работы привода задаются соответствующими форматами команд, при этом используются режимы управления по угловому положению (задается и поддерживается по достижении целевого углового положения) и управления по скорости (задается величина угловой скорости вращения вала). Для настройки параметров следящего контура контроллера пользователю предлагается ряд параметров, таких как: максимальное угловое ускорение, максимальная угловая скорость, максимальный ток в двигателе, пропорциональный и интегральный коэффициенты цепи обратной связи по угловой скорости, пропорциональный и дифференциальный коэффициенты цепи обратной связи по угловому положению вала. Все вышеперечисленные коэффициенты могут быть подобраны исходя из заданного критерия оптимальности и изменены в процессе работы для адаптации к изменившемуся режиму движения.
Блок определения допустимого бокового отклонения 2 судна от заданной траектории может быть выполнен также на основе стандартного микропроцессора, в том числе и зарубежных фирм.
При движении по заданной траектории основной регулируемой величиной является боковое отклонение центра масс судна от заданной траектории движения. Боковое отклонение вычисляется по данным счисления (лаг + магнитный компас) или инерциальной навигационной системы и спутниковым навигационным системам второго поколения (GPS, ГЛОНАСС, GPS+ГЛОНАСС), работающим в непрерывном дифференциальном режиме.
Заданный маршрут вводится в электронно-картографическую навигационно-информационную систему, а из нее - в авторулевой, в виде координат начальной и конечной точек прямолинейных отрезков желаемой траектории, снятых с морской навигационной или лоцманской карт. На основе непрерывных данных о текущем месте судна автопилот вырабатывает значения маршрутных координат: бокового отклонение судна у от заданной траектории, а также расстояние х до следующей точки поворота. Второй регулируемой величиной в автопилоте судна является угловое отклонение судна от заданного курса, который при этом совпадает с направлением заданной траектории. Автоматическое управление судном по заданной траектории движения осуществляется по командам в авторулевой, которые вырабатывает электронная картографическая навигационная информационная система (ЭКНИС) 7. Задача управления движением решается на основании информации, включающей:
- допустимое боковое отклонение удоп судна от заданной траектории движения. Когда фактическое отклонение у, вызванное суммарным сносом судна течением и ветром и определяемое по обсервациям, становится равным допустимому, т.е. у=удоп, ЭКНИС вырабатывает команду в АР на изменение удерживаемого курса на угол К в сторону возвращения судна на заданную траекторию движения;
- угол К изменения курса судна в сторону заданной траектории движения. По умолчанию К=5° или курс направляется в очередную поворотную (маршрутную) точку заданной траектории движения.
Алгоритмы решения данной задачи и необходимый математический аппарат соответствует алгоритмам и математическому аппарату прототипа.
Панорамная гидроакустическая система 15 включает эхолот 16 с двумя характеристиками направленности, два гидролокатора 17 бокового обзора с переключаемой характеристикой направленности, параметрический профилограф 18, цифровой блок обработки сигналов 19 и цветной дисплей 20. Цифровой блок обработки сигналов 19 своими входами соединен с выходами эхолота 16, гидролокаторов 17 бокового обзора, профилографа 18, приемоиндикатора спутниковой навигационной системы GPS 8, электронной картографической навигационно-информационной системы 7 и цветным дисплеем 20, а своим выходом соединен с блоком управления 1 с панелями управления и предназначен для повышения безопасности движения преимущественно крупнотоннажных судов, предназначенных для транспортировки опасных грузов.
Так как обозначенные на навигационных картах глубины и навигационные опасности (подводные рифы, отмели и т.д.) могут отличаться от реальных условий плавания, например неучтенные наносы, появление крупногабаритных предметов, после штормов и т.д., то для повышения безопасности плавания в стесненных условиях плавания целесообразно на этих судах использовать панорамную гидроакустическую систему 15, обеспечивающую измерение глубин, обнаружение подводных препятствий и их классификацию и размерность.
При этом при обнаружении неучтенных препятствий на навигационной карте или существенном отличии реальных (измеренных) глубин, представляющих опасность для дальнейшего следования судна по намеченному курсу, по измеренным параметрам посредством ЭКНИС 7 устанавливается область навигационной безопасности плавания, она определяется по следующему алгоритму. На электронную навигационную карту выводят значение глубины, являющееся для судна заданных габаритов и маневренных характеристик исходя из конкретных условий плавания (скорость, курс, крен и т.д.) навигационной опасностью. Вокруг точек с опасной глубиной и других навигационных опасностей, обозначенных на карте, проводятся окружности с радиусами безопасной дистанции до опасностей. Площадь акватории, ограниченная этими окружностями, определяет зону, опасную в навигационном отношении (выражения 1-6), за границей которой судно гарантированно (Р=0.95) не совершит навигационное происшествие, связанное с касанием грунта или навалом на гидротехническое сооружение. В экстренных случаях, по измеренным параметрам, в блоке управления 1 формируется сигнал тревоги и на рулевое устройство подаются соответствующие корректирующие сигналы.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и элементы вычислительной техники, а также существующие технические средства навигации.
Технико-экономическая эффективность заявленного авторулевого судна заключается:
- в исключении риска влияния человеческого фактора на безопасность плавания судна;
- в повышении производительности труда вахтенного помощника капитана на 15-20%;
- в экономии расхода топлива и моторного масла за счет минимальных отклонений судна от заданной траектории движения до 5% и сокращении времени перехода;
- в повышении навигационной безопасности плавания за счет исключения отвлечений вахтенного помощника капитана от несения ходовой вахты для производства штурманских расчетов и введения вручную необходимых поправок в авторулевой на 10%,
- повышении безопасности плавания крупнотоннажных судов транспортировки опасных грузов в стесненных в навигационном отношении условий плавания.
Источники информации
1. Патент RU №2224279 C1, 20.02.2004.
2. Патент RU №2207585 C2, 27.06.2003.
3. Патент RU №2260191 C1, 10.09.2005.
4. Патент US №5523951 A, 04.06.1996.
5. Патент US №5179385 A, 12.01.1993.
6. Патент US №4513378 A, 23.04.1985.
7. Патент RU №2410282, 17.01.2011.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
Изобретение относится к техническим средствам судовождения. Авторулевой судна содержит блок управления, датчик обратной связи, переключатель режимов управления. Выходы рулевого колеса, гидравлического устройства управления рулем и электронной картографической навигационно-информационной системы подключены к входу блока управления через переключатель режимов управления. Приемоиндикатор спутниковой навигационной системы GPS подключен на вход электронной картографической навигационно-информационной системы. Выход блока управления соединен с входом рулевой машины, выход которой через датчик обратной связи соединен с входом блока управления. К блоку управления дополнительно подсоединен блок определения допустимого бокового отклонения судна от заданной траектории его движения. Вход данного блока подключен к выходам упомянутого приемоиндикатора и электронной картографической навигационно-информационной системы. В авторулевой дополнительно введены инерциальная навигационная система, панорамная гидроакустическая система, содержащая эхолот с двумя характеристиками направленности, два гидролокатора бокового обзора с переключаемой характеристикой направленности, параметрический профилограф. Выход панорамной гидроакустической системы соединен с еще одним входом блока управления. Инерциальная система своими входами соединена с выходом приемоиндикатора и выходом лага, а своим входом-выходом - с еще одним входом блока управления. Изобретение позволяет расширить функциональные возможности авторулевого. При этом исключается риск влияния человеческого фактора на безопасность плавания судна, повышается производительность труда вахтенного помощника капитана, экономятся топливо и моторное масло, повышаются навигационная безопасность плавания и безопасность плавания крупнотоннажных судов транспортировки опасных грузов в стесненных в навигационном отношении условиях плавания. 2 ил., 1 табл.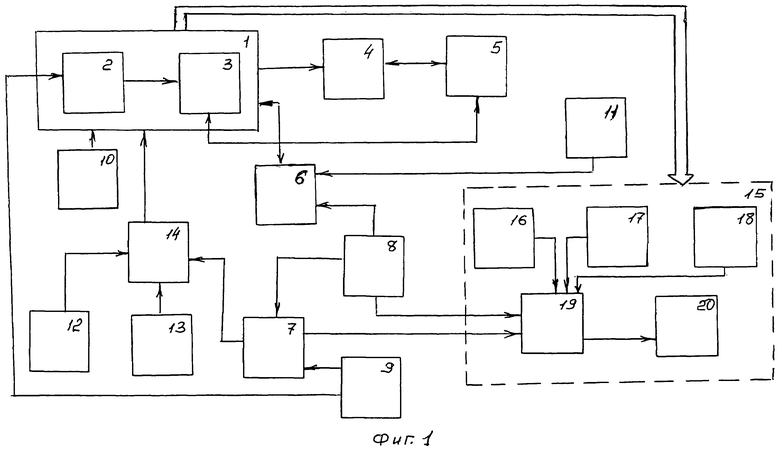
Авторулевой судна, содержащий блок управления с панелями управления, датчик обратной связи, переключатель режимов управления, при этом выходы рулевого колеса, гидравлического устройства управления рулем и электронной картографической навигационно-информационной системы подключены к входу блока управления через переключатель режимов управления, приемоиндикатор спутниковой навигационной системы GPS подключен на вход электронной картографической навигационно-информационной системы, а выход блока управления соединен с входом рулевой машины, выход которой через датчик обратной связи соединен с входом блока управления, к которому дополнительно подсоединен блок определения допустимого бокового отклонения судна от заданной траектории его движения, при этом вход данного блока подключен к выходам приемоиндикатора спутниковой навигационной системы GPS и электронной картографической навигационно-информационной системы, отличающийся тем, что дополнительно введены инерциальная навигационная система, панорамная гидроакустическая система, содержащая эхолот с двумя характеристиками направленности, два гидролокатора бокового обзора с переключаемой характеристикой направленности, параметрический профилограф, выход которой соединен с еще одним входом блока управления с панелями управления, инерциальная система своими входами соединена с выходом приемоиндикатора спутниковой навигационной системы GPS и выходом лага соответственно, а своим входом-выходом соединена с еще одним входом блока управления.
| АВТОРУЛЕВОЙ СУДНА | 2009 |
|
RU2410282C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2224279C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |

