Изобретение относится к устройству, содержащему раму, имеющую по меньшей мере три ножки, при этом каждая из этих трех ножек выполнена с возможностью индивидуального и выборочного выдвижения для регулировки длины каждой из этих по меньшей мере трех ножек.
Поддерживающий элемент, устройство и запирающий элемент указанного выше типа известны. Поддерживающий элемент, например, может быть элементом выдвижной ножки для стола или лестницы. Элемент выдвижной ножки может использоваться для стабилизации лестницы или стола на неровной поверхности. Выдвигая одну или более ножку, можно тщательно позиционировать объект в требуемой ориентации. Кроме того, элемент выдвижной ножки может использоваться для позиционирования поверхности объекта (например, столешницы стола или подставки для ведра) в горизонтальной ориентации.
В одном варианте ножка по прототипу содержит два элемента ножки, которые могут быть соединены друг с другом с возможностью скольжения. Для крепления этих двух частей ножки друг к другу может использоваться фиксирующий или запирающий механизм так, чтобы можно было зафиксировать необходимую длину элемента выдвижной ножки. Фиксация может осуществляться штифтом или винтом, который вставляется в отверстия, выполненные в одной части или в обеих частях ножки.
Кроме того, также известны стол или лестница, имеющие одну или более выдвижную ножку. Регулируя длину одной или более выдвижной ножки, такую лестницу можно установить в требуемой ориентации.
Недостатком ножек по предшествующему уровню техники является то, что регулировка их длины может быть трудоемкой и отнимать много времени.
Недостатком известных устройств со множеством выдвижных ножек является то, что позиционирование объекта может быть трудоемким. Например, при установке стола или лестницы на неровной поверхности может потребоваться регулировка множества ножек. Это может оказаться трудным, поскольку пользователю придется определять порядок регулировки ножек и степень, в которой следует выдвинуть каждую ножку, прежде чем объект окажется в нужном положении.
Целью настоящего изобретения является создание устройства, содержащего регулируемую ножку, в котором по меньшей мере один из известных недостатков устранен.
В варианте настоящего изобретения устройство содержит раму, имеющую по меньшей мере три ножки для установки устройства на поверхности. Каждая из этих по меньшей мере трех ножек может индивидуально и выборочно регулироваться в осевом направлении для регулировки длины каждой из ножек. Каждая ножка может содержать трансмиссионный элемент и запирающий элемент. Запирающий элемент имеет запирающее положение для фиксации осевой длины ножки и открытое положение, позволяющее изменять длину ножки.
В одном варианте трансмиссионный элемент соединяет запирающие механизмы в по меньшей мере трех ножках с центральным управляющим механизмом для активации и деактивации каждого запирающего элемента. Центральный управляющий механизм выполнен с возможностью активации или деактивации каждого запирающего элемента одновременно. Таким способом можно получить устройство, например лестницу, стол или штатив, в котором запирающий элемент каждой выдвижной ножки можно отпереть одновременно, используя только центральный управляющий механизм.
Центральный управляющий механизм позволяет запирать несколько ножек, выдвинутых на требуемую длину, одной операцией.
Дополнительно, каждая ножка может выдвигаться индивидуально, что означает, что пользователь может произвольно выбирать каждый из поддерживающих элементов. Длина одного из поддерживающих элементов не зависит от длины другого поддерживающего элемента. Эта возможность, в комбинации с центральным управляющим механизмом, позволяет пользователю относительно легко и быстро позиционировать устройство в требуемой ориентации. Например, можно позиционировать стол или штатив в горизонтальном положении или установить лестницу в стабильном положении на неровной поверхности.
Согласно одному варианту настоящего изобретения устройство содержит по меньшей мере две ножки, соединенные шарнирно относительно друг друга. Далее, каждая из этих по меньшей мере двух ножек содержит по меньшей мере один поддерживающий элемент, содержащий запирающую систему по настоящему изобретению. Поддерживающие элементы индивидуальных шарнирно установленных ножек соединены с центральным управляющим механизмом, позволяющим одновременно приводить в действие запирающие элементы в каждой из шарнирно установленных ножек.
Управляющий механизм может содержать управляющую рукоятку, соединенную с тягой. Тяга может быть прикреплена к раме с возможностью вращения. Тяга может быть прикреплена к раме с помощью подшипников. Тяга может содержать по меньшей мере два толкателя, расположенных на расстоянии друг от друга. Каждый толкатель выполнен с возможностью взаимодействия с одним из трансмиссионных элементов. Управляющий механизм выполнен так, что поворот тяги при повороте управляющей рукоятки приводит к линейному движению трансмиссионного элемента под действием толкателя. Трансмиссионный элемент расположен так, что линейное движение трансмиссионного элемента приводит к наклону собачки запирающего элемента. Таким образом, достигается жесткое срабатывание, а запирающий элемент является надежным и безопасным.
Устройство может содержать опорную платформу, от которой вниз отходят по меньшей мере три выдвижные ножки. Опорная платформа может использоваться для установки на ней объекта. При наличии регулируемых опорных элементов можно относительно легко выставить опорную платформу горизонтально.
В одном варианте настоящего изобретения устройством является лестница. Лестница может содержать два, три или четыре опорных элемента по настоящему изобретению. Такую лестницу можно легко установить на неровной поверхности. При использовании центрального управляющего элемента лестницу можно установить относительно быстро и легко.
В одном варианте ножка содержит поддерживающий элемент, содержащий первый элемент ножки и второй элемент ножки. Первый элемент ножки выполнен с возможностью осевого перемещения относительно второго элемента ножки для удлинения опорного элемента. Первый элемент ножки содержит корпус, в который можно вставить с возможностью скольжения второй элемент ножки. Корпус содержит запирающий элемент, имеющий запертое положение, для блокирования относительного осевого перемещения первого элемента ножки относительно второго элемента ножки, и открытое положение, допускающее относительное осевое перемещение этих двух элементов. Установка запирающего элемента в корпус позволяет уменьшить загрязнение запирающего элемента и сохранять его относительно чистым. В этом случае запирающий элемент меньше изнашивается и функционирует более надежно.
В одном варианте запирающий элемент может содержать собачку, установленную с возможностью наклона в корпусе для поочередного занятия запертого положения и открытого положения. Собачка может быть относительно плоской пластиной. Собачка может содержать полость для приема второй ножки. Собачка содержит стопорную поверхность, окружающую по меньшей мере часть периметра полости. Полость может быть отверстием в собачке или открытой полостью в собачке. Часть поверхности собачки, окружающая полость, может быть стопорной поверхностью. Стопорная поверхность может быть относительно небольшой и может содержать относительно небольшую часть поверхности полости, например кромку полости. Открытая полость может быть U-образной. В открытом положении запирающего элемента стопорная поверхность не контактирует со вторым элементом ножки, поэтому второй элемент ножки может свободно скользить в корпусе. Собачка может быть расположена так, что в запертом положении запирающего элемента стопорная поверхность будет находиться в зацеплении с по меньшей мере противоположными частями периметра второго элемента ножки. За счет зацепления с противоположными частями периметра второй элемент ножки фиксируется в полости. За счет наклона полости так, чтобы в запертом положении стопорная поверхность находилась в зацеплении с противоположными частями периметра второго элемента ножки, на второй элемент ножки действует момент. Этот момент плотно прижимает второй элемент ножки к корпусу и к стопорной поверхности (например, к кромке) собачки. Полученное статическое трение между вторым элементом ножки, с одной стороны, корпусом и стопорной поверхностью собачки, с другой стороны, обеспечивает плотную и безопасную фиксацию второго элемента ножки. Дополнительным преимуществом настоящего изобретения является то, что поддерживающий элемент имеет возможность бесступенчатой регулировки, т.е. поддерживающий элемент можно зафиксировать в любом требуемом положении без необходимости настраивать дискретные положения поддерживающего элемента.
В одном из вариантов стопорная поверхность относительно невелика и содержит кромку полости. Кромка может быть относительно острой так, чтобы в запертом положении кромка прижималась ко второму элементу ножки. Кромка может врезаться во второй элемент ножки. Это позволяет получить более высокое давление запирания, что создает хорошее сопротивление относительному перемещению двух элементов ножки.
В одном из вариантов настоящего изобретения ось полости в открытом положении проходит параллельно второму элементу ножки. Собачка в открытом положении может быть расположена перпендикулярно второму элементу ножки так, чтобы полость была параллельна второму элементу ножки. Таким способом создается необходимое пространство для свободного движения второго элемента ножки. Кроме того, при этом нужен лишь небольшой наклон, чтобы переместить собачку между запертым и открытым положениями. За счет этого поддерживающий элемент может быть относительно компактным.
В одном из вариантов запирающий элемент, в частности собачка, поджимается к запертому положению. Благодаря поджиманию запирающего элемента к запертому положению, на второй элемент ножки в запертом положении действует большее усилие. Поэтому также увеличивается статическое трение, позволяющее создать более плотную фиксацию второго элемента ножки. В корпусе можно установить пружину или любой другой поджимающий элемент. Разумеется, можно установить множество пружин или поджимающих элементов. Пружина расположена для выталкивания собачки в сторону запертого положения и для плотного прижимания стопорной поверхности собачки к внешней поверхности второго элемента ножки для увеличения статического трения. Это позволяет создать поддерживающий элемент с жестким запирающим элементом, обеспечивающим прочное крепление.
По меньшей мере часть собачки и/или по меньшей мере часть второго элемента ножки могут быть выполнены из закаленной стали. Предпочтительно, по меньшей мере часть собачки, взаимодействующая со вторым элементом ножки, и часть второго элемента ножки, взаимодействующая с собачкой, выполнены из закаленной стали. Коэффициент трения между двумя поверхностями, обе из которых выполнены из закаленной стали, относительно высок. Более конкретно, коэффициент трения для сухого статического трения в этом случае обеспечивает плотную и прочную фиксацию.
В одном из вариантов элемент ножки содержит поджимающий элемент, который поджимает поддерживающий элемент в сторону его выдвинутого в осевом направлении положения. Поджимающий элемент может выталкивать ножки поддерживающего элемента в сторону выдвинутого положения. Когда запирающий элемент не работает (т.е., находится в открытом положении), второй элемент ножки может выдвигаться наружу. Поддерживающий элемент может перемещаться в максимально выдвинутое положение в результате усилия, прилагаемогол поджимающим элементом.
Альтернативно, поджимающий элемент может быть расположен для балансировки определенного веса, который должен поддерживать поддерживающий элемент. Таким образом, когда запирающий элемент находится в открытом положении, поддерживающий элемент не выдвигается и не убирается. Это позволяет пользователю относительно легко устанавливать поддерживающую ножку в нужном положении. Пользователь может отпереть запирающий элемент и приложить лишь небольшое усилие, чтобы отрегулировать длину поддерживающего элемента.
В одном из вариантов поджимающее усилие имеет такое же численное значение, что и масса, поддерживаемая поддерживающим элементом. Если устройство содержит множество поддерживающих элементов или ножек, поджимающее усилие этого множества поддерживающих элементов соответствует поддерживаемой массе. Это позволяет получить "плавающую" конструкцию поддерживающего элемента/устройства, при которой, когда поддерживающий элемент/устройство установлен на поверхности, а запирающий элемент открыт, можно выдвинуть или убрать ножку, а массу поддерживать поджимающим усилием. Оператор может поднять или опустить устройство, не испытывая или почти не испытывая сопротивления.
В одном из вариантов запирающий элемент содержит дополнительную собачку, которая выполнена с возможностью наклона корпуса для поочередного занятия запертого положения и открытого положения. Эта дополнительная собачка содержит полость, в которую вставлен второй элемент ножки. Эта дополнительная собачка имеет стопорную поверхность, окружающую часть второго элемента ножки. Дополнительная собачка имеет стопорную поверхность, окружающую часть периметра полости. Стопорная поверхность может окружать дополнительную часть второго элемента ножки по сравнению с той частью, которую окружает первая собачка. Стопорная поверхность может быть расположена для взаимодействия в запертом положении запирающего элемента по меньшей мере с противоположными частями периметра второго элемента ножки. Дополнительная собачка дает еще более плотную фиксацию двух элементов ножки. Собачки могут окружать разные в продольном направлении части второго элемента ножки. Например второй элемент ножки может фиксироваться в двух разных осевых положениях, что дает жесткую и прочную фиксацию этого элемента ножки.
В одном из вариантов собачка и дополнительная собачка расположены для наклона к запертому положению в противоположных направлениях. Благодаря этому можно создать относительно компактную конструкцию. Дополнительно, собачки могут зацепляться со вторым элементом ножки под разными углами. За счет этого второй элемент ножки фиксируется еще более плотно и осевое перемещение второго элемента ножки предотвращается.
В одном из вариантов между собачкой и дополнительной собачкой установлен поджимающий элемент, например пружина. Поскольку поджимающий элемент взаимодействует с обеими собачками, возникает поджимающее усилие, разводящее собачки друг от друга. Предпочтительно, наклон собачек друг от друга соответствует наклону собачек в запертое положение. При такой конструкции поджимающий элемент поджимает запирающий элемент в запертое положение.
Такой поджимающий элемент предпочтительно является цилиндрической пружиной. Поджимающий элемент, поджимающий запирающий элемент в запертое положение, может быть цилиндрической пружиной, навитой вокруг элемента ножки. Это позволяет упростить конструкцию, облегчить сборку поддерживающего элемента, особенно, если используется цилиндрическая пружина.
Запирающий элемент может содержать кулачок, расположенный в корпусе. В одном из вариантов корпус содержит кулачок, взаимодействующий с собачкой для воздействия на собачку для перевода ее из запертого положения в открытое положение.
В одном из вариантов противоположные стороны кулачка могут воздействовать на две собачки. Кулачок может быть расположен для одновременного отклонения двух собачек из запертого положения в открытое положение. Кулачок позволяет одновременно приводить в действие две собачки. Благодаря этому можно относительно легко получить плотную фиксацию элементов ножки.
В одном из вариантов поддерживающий элемент содержит трансмиссионный элемент, соединенный с запирающим элементом и проходящий к внешней кромке элемента ножки. Трансмиссионный элемент может быть соединен с управляющим элементом, расположенным на элементе ножки для управления запирающим элементом. Таким образом, запирающий элемент можно приводить в действие дистанционно, на расстоянии от реального положения запирающего элемента. Управляющий элемент может быть установлен в положении, которое эргономически оптимально для пользователя, не ухудшая компактность поддерживающего элемента. Эргономическое положение управляющего элемента позволяет легко и безопасно регулировать поддерживающие элементы.
В предпочтительном варианте трансмиссионный элемент соединен с кулачком. Трансмиссионный элемент, например пруток, тяга, трос и т.п., может быть расположен так, чтобы срабатывание управляющего элемента приводило к требуемому движению кулачка и, кроме того, к наклону одной или более из собачек. Трансмиссионный элемент может быть соединен с корпусом с возможностью скольжения. Трансмиссионный элемент может быть расположен так, чтобы он перемещался параллельно первому элементу ножки для приведения в действие запирающего элемента. Осевое движение трансмиссионного элемента может преобразовываться кулачком в движение наклона одной или более из собачек. Таким образом, можно создать относительно компактный поддерживающий элемент.
Предпочтительно трансмиссионный элемент является жестким элементом, например прутком или стержнем. Жесткий элемент очень точно передает движения от управляющего механизма на запирающий элемент. Силы, действующие на жесткий элемент, не деформируют его, как это было бы при использовании, например, тросика. Многократное растяжение и деформация тросика в итоге приводят к его обрыву. Это ограничивает безопасность поддерживающего элемента, что нежелательно. Жесткий трансмиссионный элемент позволяет создать более безопасный и более точный поддерживающий элемент.
Согласно одному аспекту настоящего изобретения предлагается устройство, содержащее раму, имеющую по меньшей мере две ножки. По меньшей мере одна ножка может содержать поддерживающий элемент по настоящему изобретению. Устройство может быть лестницей или столом. Поддерживающий элемент можно легко и безопасно регулировать, как следует из вышеприведенного описания. Таким образом, устройство можно относительно легко установить в нужное положение. Кроме того, такая лестница может выдерживать достаточно большой вес. Такое устройство с поддерживающим элементом по настоящему изобретению может легко поддерживать вес более 150 кг.
Согласно другому аспекту настоящего изобретения предлагается устройство по п.20 формулы изобретения. Устройство по п.20 формулы может иметь любой из признаков пп.1-19 формулы. Это устройство имеет преимущество, заключающееся в том, что запирающий элемент в установленной на шарнире ножке приводится в действие дистанционно.
Хотя настоящее изобретение описано и будет описано со ссылками на предпочтительные варианты, понятно, что в пределах объема защиты изобретения в него могут быть внесены различные изменения. Целью настоящей заявки является защита описанных вариантов, вариантов, приведенных в формуле, а также их эквивалентов. Специалисты на основе уже известных преимуществ настоящего изобретения могут сконструировать другие варианты. Изобретатель настоящей заявкой намерен защитить и такие варианты.
Выше, как и в нижеследующем подробном описании, описаны различные аспекты настоящего изобретения. Изобретатель намерен защитить все упомянутые и неупомянутые преимущества настоящего изобретения по сравнению с прототипом, используя настоящую заявку и/или выделенные заявки.
Далее следует более подробное описание изобретения со ссылками на приложенные чертежи, где приведено:
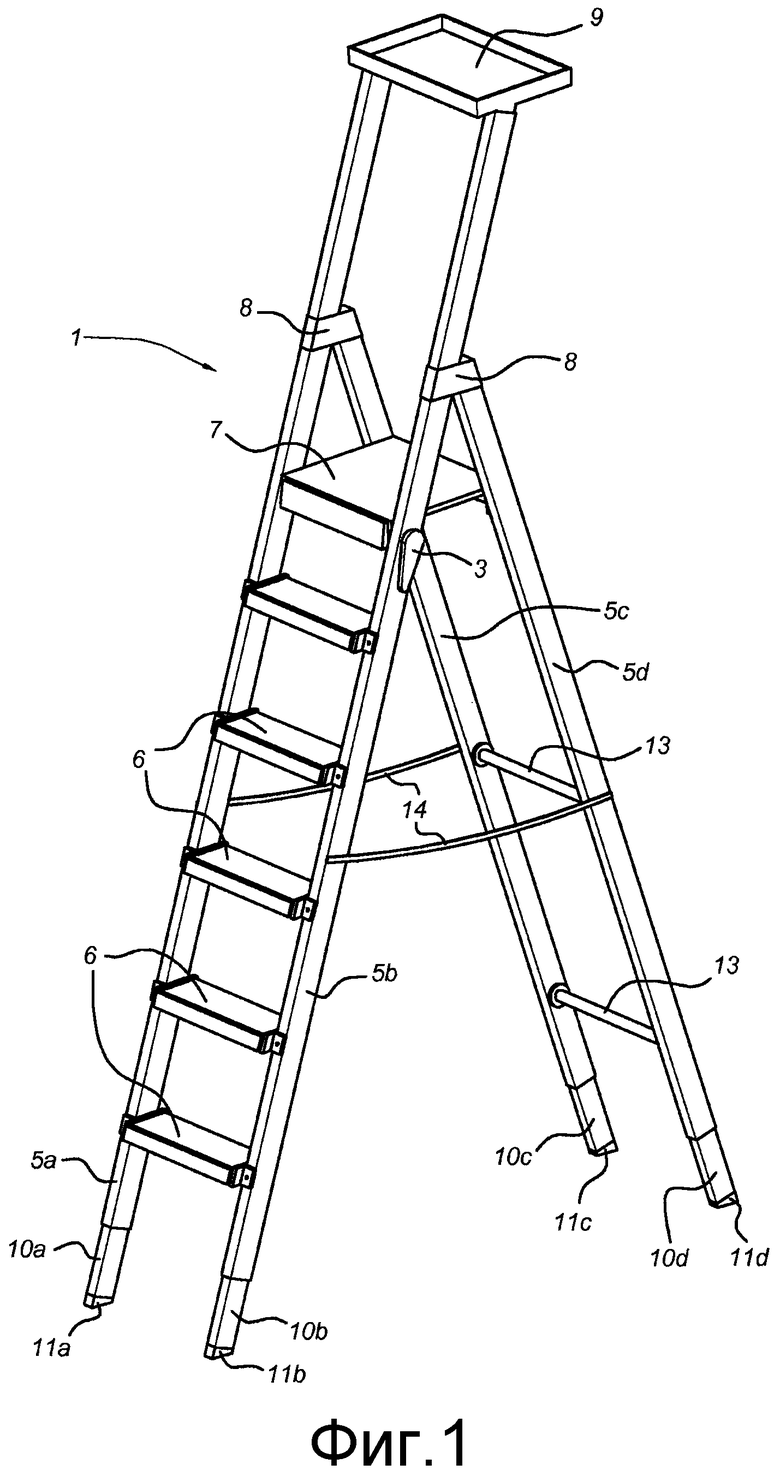
Фиг.1 - вид лестницы в перспективе.
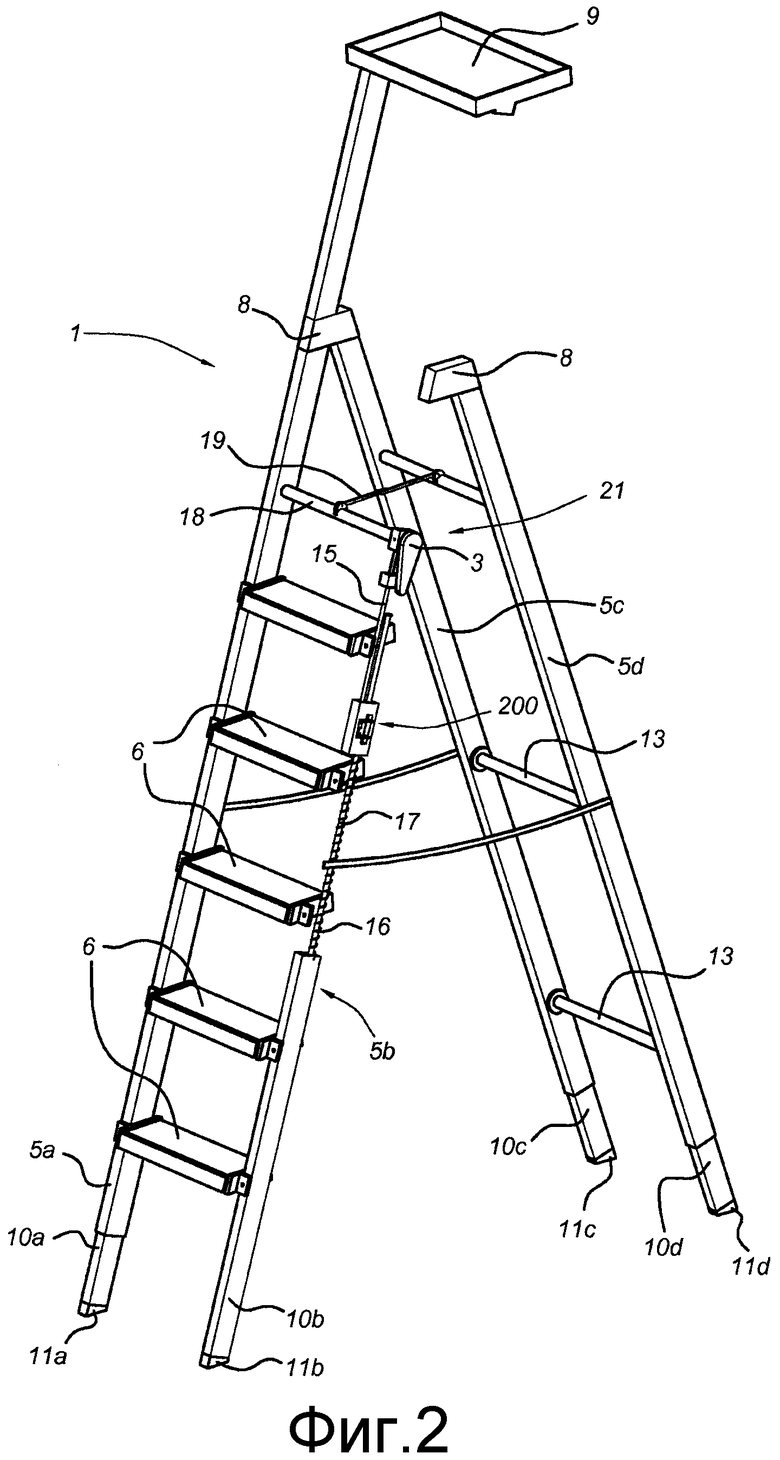
Фиг.2 - разнесенный вид лестницы в перспективе, более подробно иллюстрирующий вариант поддерживающего элемента с запирающим элементом и управляющим механизмом.
Фиг.3 - запирающий элемент по варианту настоящего изобретения, две проекции.
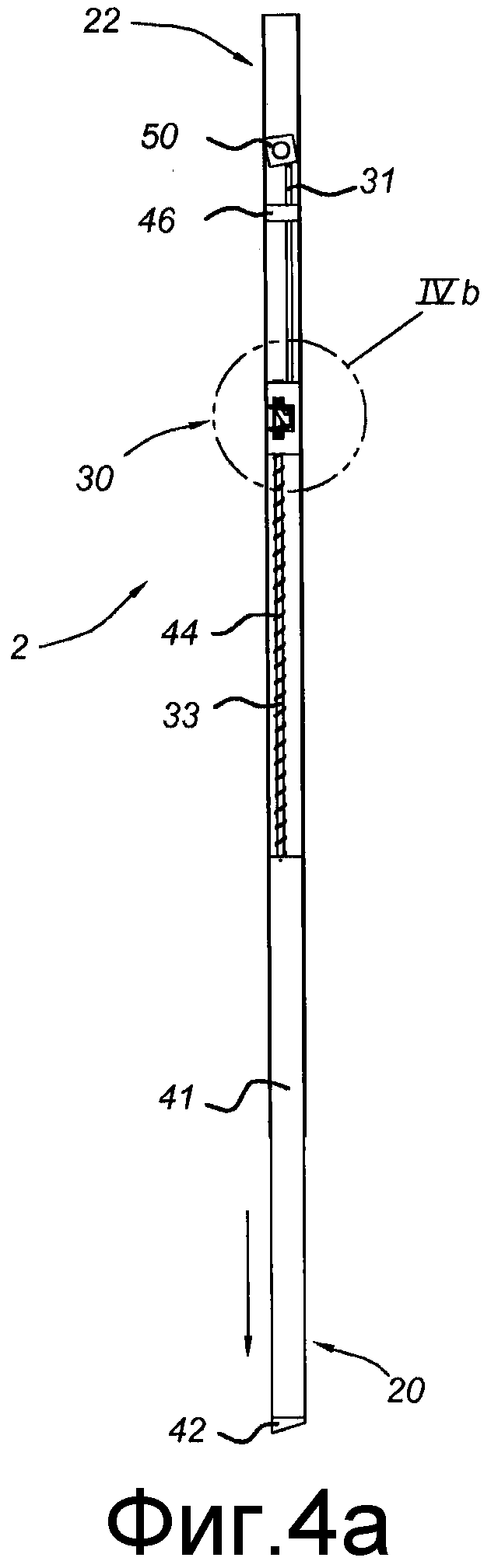
Фиг.4а - вид сбоку поддерживающего элемента по фиг.3 в запертом положении.
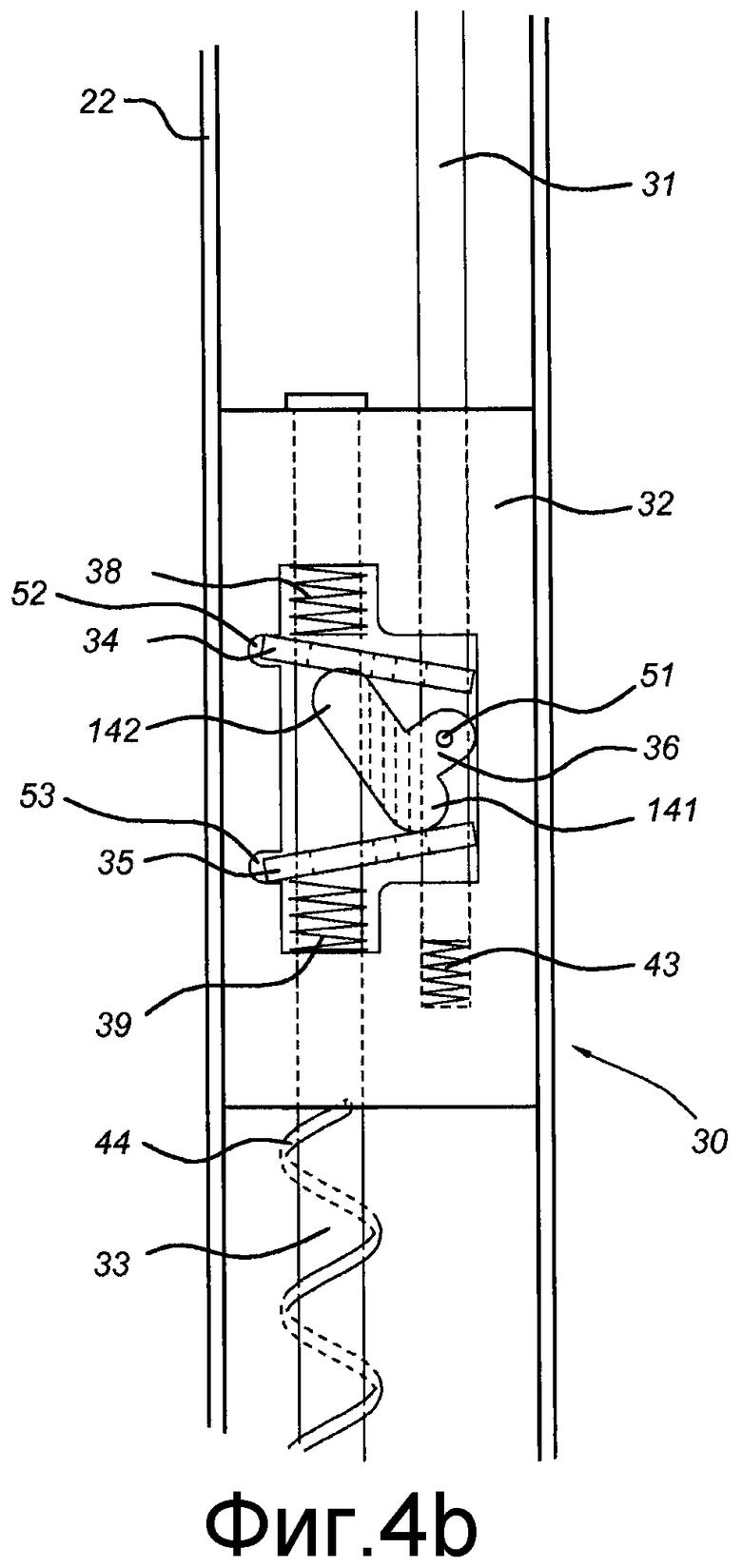
Фиг.4b - деталь запирающего механизма по фиг.4а.
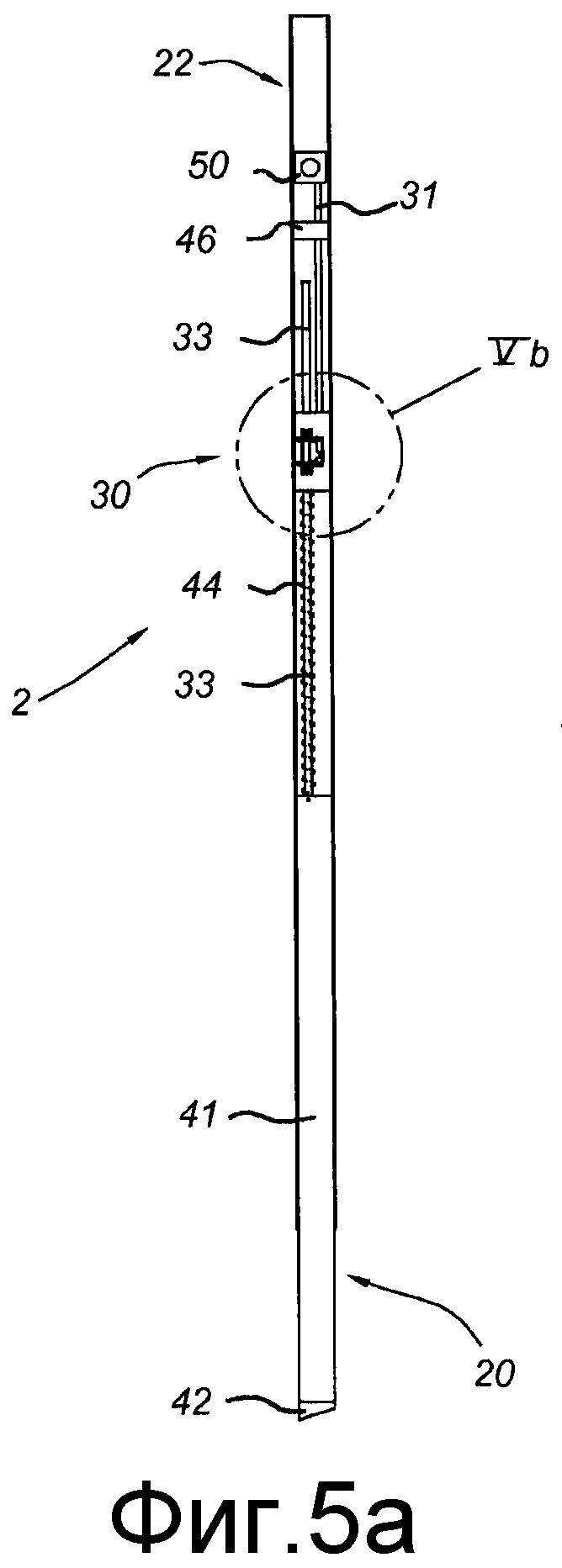
Фиг.5а - вид сбоку поддерживающего элемента по фиг.3 в запертом положении.
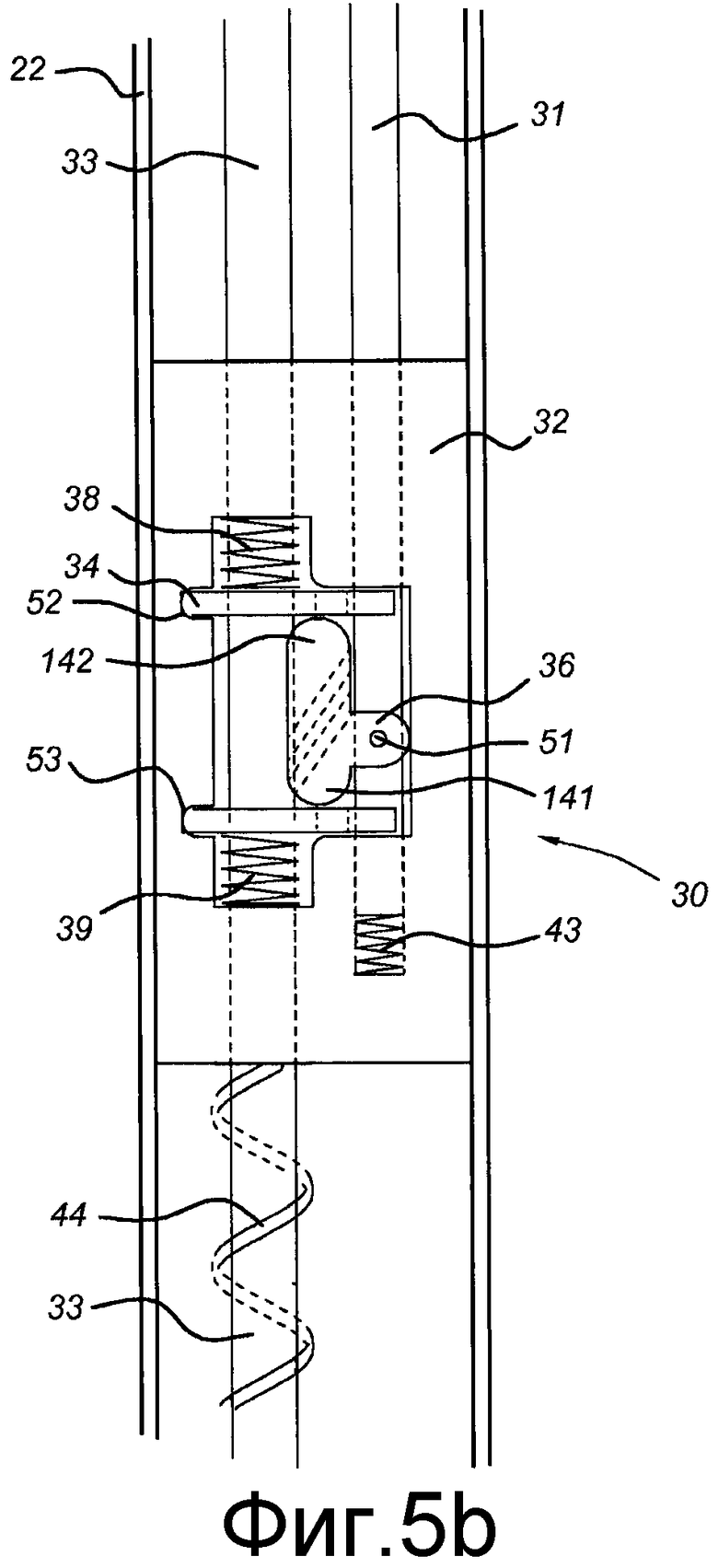
Фиг.5b - деталь запирающего механизма по фиг.5а.
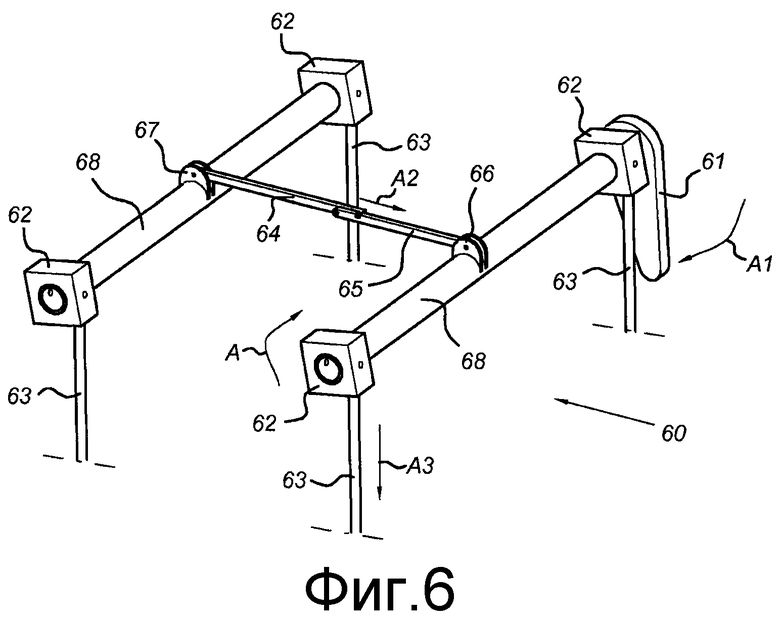
Фиг.6 - вид в перспективе управляющего механизма для управления запирающим элементом.
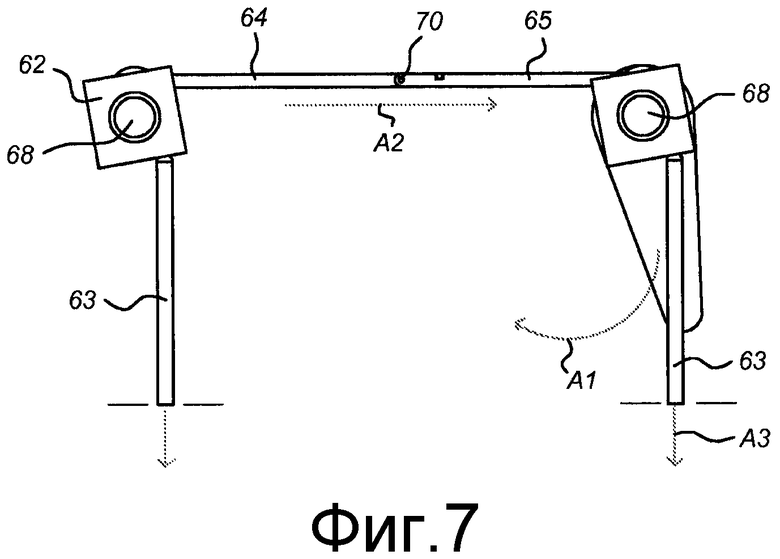
Фиг.7 - вид сбоку управляющего механизма по фиг.6.
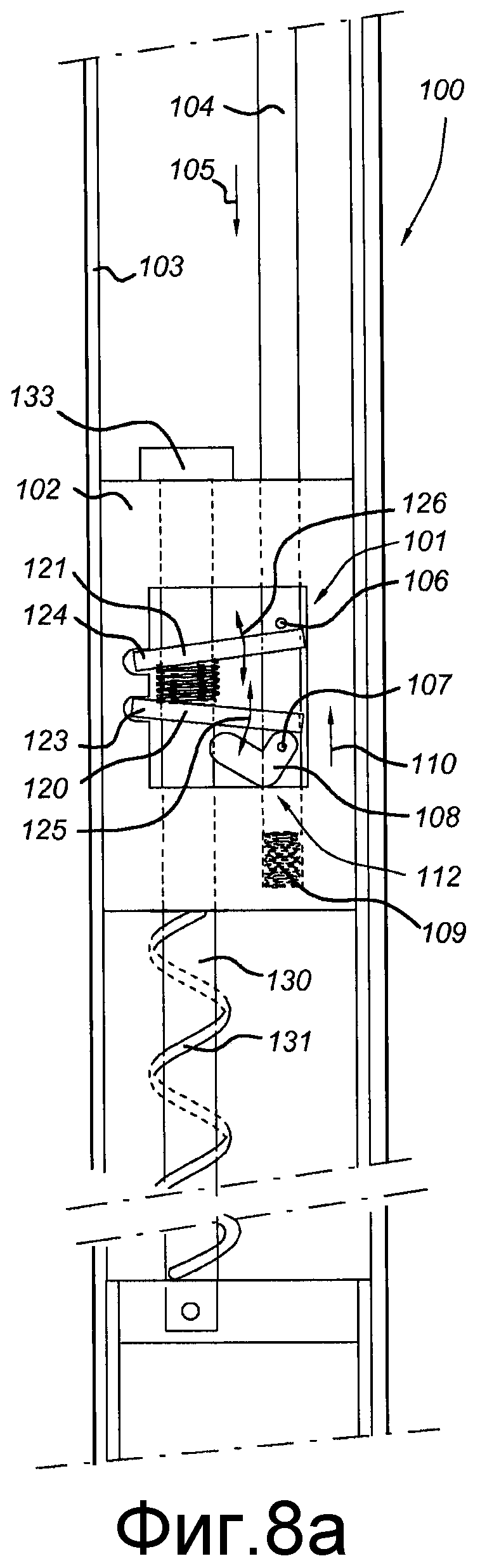
Фиг.8а - вид сбоку другого варианта запирающего механизма в запертом положении.
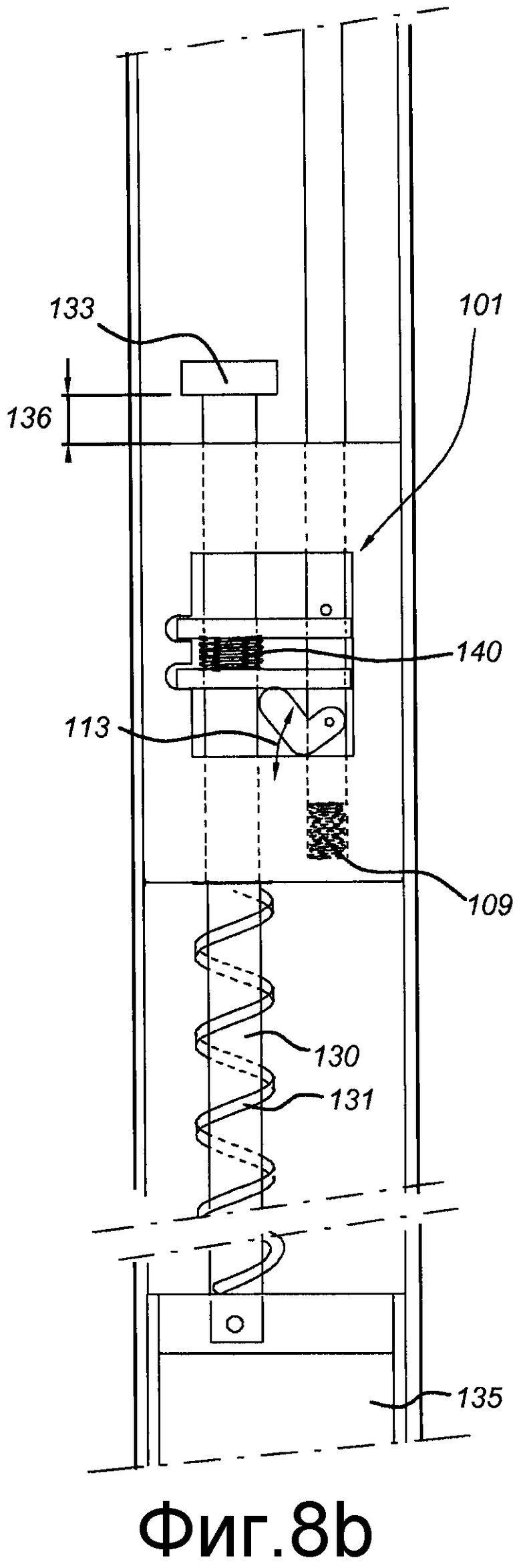
Фиг.8b - вид сбоку варианта по фиг.8а в незапертом положении.
На фиг.1 показана лестница 1 в перспективе. Лестница имеет раму. Лестница 1 содержит две передние ножки 5а, 5b и две задние ножки 5с, 5d. Передние ножки 5а, 5b, разнесены в горизонтальном направлении друг от друга множеством ступенек 6, которые могут быть установлены с регулярными продольными интервалами между ними. На верхнем конце двух передних ножек имеется подставка 9 для ведра. Передние ножки 5а, 5b, ступеньки 6 и подставка 9 для ведра являются частью передней рамы. Задние ножки 5с, 5d разнесены по горизонтали друг от друга двумя соединительными перекладинами 13. Задние ножки 5с, 5d и соединительные перекладины 13 являются частью задней рамы. Передняя рама и задняя рама шарнирно соединены друг с другом шарнирами 8. Верхняя ступенька 7 соединяет переднюю раму и заднюю раму и обеспечивает стабильный и фиксированный угол, под которым находятся передняя рама и задняя рама относительно друг друга. Для этого между передней и задней рамами также расположены два распорных элемента 14. Верхняя ступенька может быть соединена с возможностью поворота с задней рамой способом, хорошо известным специалистам. Верхняя ступенька может отсоединяться от передней рамы, что позволяет задней раме поворачиваться вокруг шарниров 8 к передней раме. Таким образом, лестница может складываться в положение, в котором задние ножки расположены относительно близко к передним ножкам и проходят параллельно им.
Как показано на фиг.1, каждая ножка 5а-d содержит выдвижную часть 10а-d. Каждая система ножки 5 и выдвижной части 10 образует поддерживающий элемент 2. Ножку можно считать первым элементом ножки, а выдвижную часть можно считать вторым элементом ножки. Эти два элемента ножки являются частью поддерживающего элемента 2. Каждая часть 10а-d ножки имеет опору 11а-d. Выдвижные части 11а-d ножек могут перемещаться в осевом направлении относительно ножек 5а-d. На одной стороне передней ножки 5b имеется управляющая рукоятка 3. Как будет описано ниже, имеется запирающий механизм 200 для блокирования относительного осевого перемещения выдвижных частей ножек и ножек. Запирающий механизм содержит запирающий элемент. Управляющая рукоятка 3 используется для запирания и отпирания запирающего механизма 200. В запертом положении выдвижные части ножек не могут перемещаться относительно ножек. В отпертом или открытом положении относительное перемещение ножек и выдвижных частей ножек возможно. Выдвижная часть может перемещаться на определенную длину относительно ножки. Длина, на которую может перемещаться выдвижная часть, может составлять, например, 20 см. Могут применяться и другие длины.
В другом варианте предлагается стол, имеющий одну или более ножку, в частности, одну или более установленную шарнирно ножку. С рамой или столешницей может быть соединен центральный управляющий механизм.
На фиг.2 приведен разнесенный вид лестницы по фиг.1. Одинаковые детали обозначены одинаковыми позициями. На этом чертеже верхняя ступенька 7 и передняя ножка 5b удалены, чтобы более подробно показать управляющий механизм 21 и запирающий механизм 200 лестницы 1. Каждая выдвижная часть 10а-d ножки содержит пруток 16, который вставлен с возможностью скольжения в запирающий элемент или запирающий механизм 200. Между корпусом запирающего механизма 200 и нижней частью выдвижной части 10а-d ножки установлена пружина 17. Другой пруток 15 установлен с возможностью скольжения в запирающем механизме 200 и проходит к верхней части лестницы 1. Там этот пруток 15 находится в зацеплении с управляющим механизмом 21. Управляющий механизм 21 содержит две штанги 18. Каждая штанга 18 соединена с возможностью вращения с двумя передними или с двумя задними ножками. Например штанги могут крепиться к рамам на подшипниках. Две эти штанги расположены параллельно друг другу и соединены тягой 19. На одном конце штанги 18 имеется рукоятка 3. Рукоятка предназначена для запирания и открывания запирающего механизма 200, как будет описано ниже.
На фиг.3 показан вид сбоку варианта части поддерживающего элемента, содержащего запирающий механизм 30, имеющий запирающий элемент 34, 35. На фиг.4а-b и на фиг.5а-b показаны другие детали поддерживающего элемента по фиг.3. На фиг.4 показан запирающий механизм 30 в запертом положении, на фиг.5 показан запирающий механизм 30 в открытом положении. Одинаковые детали обозначены одинаковыми позициями. Запирающий механизм 30 содержит корпус 32. Следует отметить, что запирающий механизм и другие детали на чертежах показаны схематически. Чертежи выполнены не в масштабе. В показанном варианте корпус 32 прикреплен к первому элементу 22 ножки, как показано на фиг.4 и 5. Первый элемент 22 ножки и второй элемент 20 ножки являются частью поддерживающего элемента 2. На одном конце корпуса 32 в него вставлен пруток 33. Пруток может скользить в осевом направлении. На верхнем конце прутка имеется упор для ограничения длины выдвижения (т.е., движения, направленного вниз) прутка. Пруток 33 соединен с нижней частью 41 ножки. Пруток 33 и нижняя часть 41 ножки являются частью второго элемента 20 ножки. Нижняя часть 41 ножки имеет опору 42 для стабильной установки лестницы или другого объекта, снабженного поддерживающим элементом 2, в рабочее положение. Вокруг прутка 33 расположена пружина 44. Пружина проходит между внешней стороной корпуса 32 и верхней частью нижней части 41 ножки. На другом конце корпуса 32 с возможностью скольжения вставлен трансмиссионный элемент 31, например трансмиссионная штанга 31. В корпусе имеется пружина 43, контактирующая с одним концом трансмиссионной штанги 31. Немного выше трансмиссионная штанга также вставлена с возможностью скольжения в направляющий блок 46. Верхний конец трансмиссионной штанги 31 находится во взаимодействии с толкателем 50, который соединен с поворотной штангой 48. Толкатель 50 и поворотная штанга 48 могут поворачиваться вокруг центральной оси поворотной штанги. Угол толкателя в запертом положении запирающего механизма 30 может лежать на поверхности. Например в запертом положении запирающего механизма 30 нижний правый угол толкателя 50 может лежать на направляющем блоке 46 и/или верхний правый угол может лежать на внутренней части первого элемента 22 ножки. Таким способом предотвращается поворот толкателя в одном направлении. Это обеспечивает возможность открытия запирающего механизма лишь небольшим поворотным движением толкателя и, следовательно, небольшим поворотным движением управляющей рукоятки 3.
В корпусе с трансмиссионной штангой 31 на шарнире 51 соединен кулачок 36. Кулачок 36 может взаимодействовать с двумя собачками 34, 35. Одна собачка 34 расположена на верхнем конце кулачка 36, и одна собачка 35 расположена на нижнем конце кулачка 36. Верхняя сторона 141 кулачка взаимодействует с собачкой 34, а нижняя сторона 142 кулачка взаимодействует с собачкой 35. Кулачок может иметь форму бабочки, т.е. иметь две ножки, проходящие вокруг прутка 33. Каждая собачка 34, 35 одной своей стороной расположена в канавке 52, 53 корпуса. Собачка 34, 35 может наклоняться или поворачиваться в корпусе вокруг оси вращения, образованной продольным направлением канавки 52, 53. Следует отметить, что в показанном варианте собачка 34, 35 не имеет фиксированной оси вращения в корпусе. Собачка не соединена с корпусом, но может свободно перемещаться в корпусе 32 и в полости 52. Внешний конец собачки может перемещаться в горизонтальной плоскости. Такая конструкция содержит меньшее количество деталей и, следовательно, запирающий механизм можно упростить, не жертвуя плотностью и безопасностью запирания двух элементов ножки.
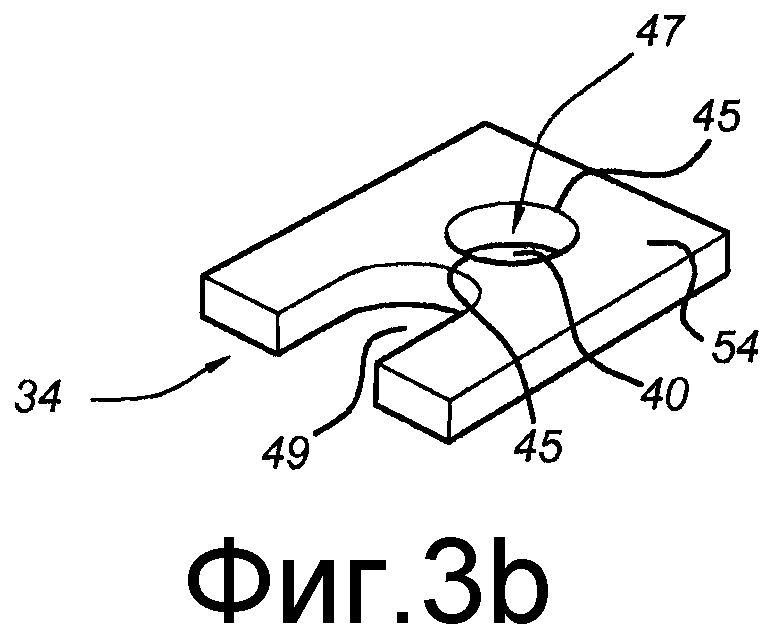
Вариант собачки 34 показан в перспективе на фиг.3b. Собачка имеет сформированную в ней полость 40. Пруток 33 второго элемента 41 ножки вставлен с возможностью скольжения в полость 40 защелки (см. фиг.3а). Полость 40 может иметь цилиндрическую форму, хотя возможны и другие формы полости. Собачка имеет стопорную поверхность 47. Стопорная поверхность может содержать внутреннюю оболочку полости 40. Предпочтительно стопорная поверхность содержит кромку 45 полости 40 на внешней поверхности 45 собачки 34. На нижней поверхности собачки 34 имеется такая же кромка. Дополнительно, в собачке 49 может быть выполнена другая полость 49 U-образной формы.
Далее следует пояснение работы запирающего механизма 30. В запертом положении, показанном на фиг.4а и 4b, трансмиссионная штанга 31 находится в верхнем положении, в котором шарнир 51 кулачка 36 также поднят вверх. Внешние поверхности кулачка выполнены так, что позволяют собачкам 34, 35 наклоняться или поворачиваться к центру корпуса 32. В наклонном положении различные части стопорной поверхности 47 полости 40 собачки 34, 35, входят в зацепление с прутком 33. Более конкретно, по меньшей мере две кромки 45 полости 40 входят в зацепление с прутком 33. В результате части двух кромок 45 на обеих сторонах полости 40 входят в контакт с прутком 33. Кромки могут вжиматься в пруток. Кромки могут также врезаться в пруток 33. Это создает высокое давление запирания и предотвращает относительное перемещение двух элементов ножек. Верхняя кромка 45 и нижняя кромка входят в зацепление с частями, которые обращены друг к другу. Поэтому зацепление осуществляется с противоположными частями периметра второго элемента 41 ножки, т.е., прутка 33. В результате на пруток 33 действует момент. В результате пруток 33 оказывается прижат и к корпусу 47, и к стопорным поверхностям 47. Пруток 33, таким образом, заклинен собачкой 34 и корпусом 32. Каждая точка контакта создает статическое трение, которое препятствует скольжению прутка 33 в корпусе 32. Таким образом, скольжение прутка 33, и, следовательно, выдвижение ножки невозможно.
Следует отметить, что для фиксации прутка 33 может быть достаточно одной собачки 34. Дополнительная собачка 35 расположена в продольном направлении от этой собачки. Такая дополнительная собачка в комбинации с первой собачкой 34 обеспечивает плотную фиксацию. На фиг.2 показано, что собачки 34, 35 могут наклоняться в разных направлениях. При этом предотвращается перемещение в обоих направлениях и обеспечивается плотная фиксация.
Пружины 38, 39, расположенные рядом с собачками 34, 35, также способствуют повороту или наклону собачек 34, 35 в направлении центра корпуса 32. Пружины 38, 39 также обеспечивают усиленное зацепление стопорных поверхностей 47 с прутком 33. При этом достигается плотная и безопасная фиксация прутка 33 в запирающем механизме. В показанном варианте пружины установлены параллельно прутку 33 второго элемента 20 ножки, и расположены вокруг него. Такое положение удобно тем, что позволяет создать компактную конструкцию и облегчает сборку поддерживающего элемента. Однако пружины можно ставить и в другие положения. Можно использовать и другие средства для поджимания собачки в запертое положение. Например, для стягивания двух собачек 34, 35 в направлении друг к другу можно использовать пружину, расположенную рядом с трансмиссионной штангой 31 и соединенную с обеими собачками 34, 35, в результате обе собачки будут поджиматься к запертому положению.
Отпирание запирающего механизма 30 может осуществляться следующим образом. При повороте толкателя 50 вокруг шарнира 48 трансмиссионная штанга 31 смещается вниз. В результате шарнир 51 кулачка 36 также смещается вниз. Кулачок и корпус расположены так, что такое направленное вниз движение приведет к повороту кулачка 36 вокруг шарнира 51. Кулачок 36 установлен так, что такое комбинированное движение приведет к одновременному отклонению обеих собачек 34, 35 из запертого положения в открытое положение. Движение кулачка 36 приводит к смещению верхней и нижней поверхностей кулачка 36, что приводит к отклонению собачек 34, 35 в сторону наружной части корпуса 32. В результате стопорная поверхность полости займет положение на некотором расстоянии от прутка 33, что позволит прутку 33 двигаться в корпусе 32. При этом ножку лестницы можно удлинить или укоротить.
Следует отметить, что в запертом положении запирающего механизма кулачок 36 может свободно поворачиваться вокруг шарнира 51. Внешние поверхности кулачка могут не находиться в непосредственном контакте с собачками 34, 35. В этом случае может потребоваться переместить трансмиссионную штангу, чтобы привести внешние поверхности кулачка в контакт с собачками, чтобы сдвинуть собачки в открытое положение. Таким образом, запирающий механизм можно перевести в открытое положение только фактическим движением трансмиссионной штанги. Это позволяет пользователю открывать запирающий механизм только намеренно и предотвратить случайное его открывание.
В открытом положении продольная ось полости 40 проходит параллельно прутку 33. Это позволяет увеличить до максимума площадь, сквозь которую проходит пруток 33, т.е. получить максимальное отверстие для прутка 33. Это позволяет предотвратить случайные закусывания.
В открытом положении пружина 44, расположенная вокруг прутка 33, поджимает выдвижную часть 41 ножки в выдвинутое положение. Предпочтительно, сила пружины подобрана так, чтобы она уравновешивала вес поддерживаемого объекта. Таким образом, освобождение запирающего механизма 30 приведет к тому, что выдвижная ножка лишь получит возможность выдвижения, не совершая фактического движения в корпусе 32. Освобождение запирающего механизма не приведет к активному укорачиванию выдвижной ножки под действием силы тяжести. Когда используется множество ножек, силу каждой пружины подбирают так, что совокупная сила пружин уравновешивает вес поддерживаемого объекта. Каждая из множества пружин может иметь разную силу, в зависимости от распределения веса поддерживаемого объекта. Объект, например лестница, снабженный множеством поддерживающих элементов по этому варианту, можно относительно легко позиционировать в любой требуемой ориентации. Усилие, необходимое для изменения ориентации объекта, относительно невелико, поскольку объект в большей или меньшей степени поддерживается поджимающими пружинами.
Когда усилие поворота с толкателя 50 снимается, действие пружин 38, 39, расположенных рядом с собачками 34, 35, а также действие пружины 43, расположенной рядом с трансмиссионной штангой 331, переместят трансмиссионную штангу 31 вверх, что приведет к запиранию запирающего механизма 30.
Желательно, чтобы объектом, имеющим множество выдвижных ножек, например лестницей, можно было управлять с помощью центрального управляющего механизма. На фиг.6 и 7 показан вариант управляющего механизма 60, подходящего для этой цели. Управляющий механизм 60 содержит две поворотных штанги 68, расположенные на расстоянии друг от друга. Параллельные штанги 68 могут быть расположены параллельно в одной плоскости, как показано на фиг.4. Поворотные штанги 68 соединены тягой 64, 65. Тяга 64, 65 соединена с каждой поворотной штангой 68 с помощью выступов 66, 67. На каждом наружном конце поворотных штанг 68 расположены толкатели 62. Толкатели 62 жестко соединены с поворотными штангами 68. На нижней поверхности каждого толкателя 62 имеется трансмиссионная штанга 63. В показанном варианте трансмиссионные штанги 63 взаимодействуют с нижней поверхностью толкателей 62 и между ними нет фиксированного соединения. Трансмиссионные штанги 63 могут быть соединены с запирающим механизмом, описанным выше. На одном конце одного толкателя 68 имеется рукоятка 61. Рукоятку можно использовать для одновременного приведения в действие запирающих механизмов множества раздвижных ножек. Следует отметить, что управляющий механизм, показанный на фиг.6, может использоваться в комбинации с любым поддерживающим элементом, независимо от типа запирающего механизма, используемого в поддерживающем элементе.
При повороте рукоятки 61 в направлении, показанном стрелкой А1, поворачивается поворотная штанга. Жесткое соединение между двумя поворотными штангами, созданное тягой 64, 65, также переместится в направлении, показанном стрелкой А2. Это приведет к такому же повороту второй поворотной штанги 68. Таким образом, обе штанги 68 повернутся на одинаковый угол. Толкатели 62 также повернутся одинаково, тем самым выталкивая трансмиссионные штанги 63 вниз. Как описано выше, направленное вниз движение трансмиссионных штанг 63 переведет запирающие механизмы в открытое положение, что позволит отрегулировать длину выдвижных ножек.
Следует отметить, что выдвижение ножки никоим образом не связано с трансмиссионной штангой 63. Как показано на фиг.2, трансмиссионная штанга 63 используется только для запирания и отпирания запирающего механизма выдвижной ножки. Таким образом, все элементы ножек могут выдвигаться независимо друг от друга. Другими словами, длина каждой ножки выбирается произвольно. Длина одной ножки не создает ограничений для установки длин других ножек. Таким образом, пользователь может отрегулировать длину каждой выдвижной ножки объекта в соответствии с необходимостью. Такая степень свободы позволяет пользователю устанавливать объект на требуемую высоту (в пределах ограничений, налагаемых длиной выдвижных ножек) и установить объект под нужным углом к основанию, на котором стоит объект. Дополнительным преимуществом является то, что запирающим механизмом каждой из выдвижных ножек можно управлять с помощью центрального управляющего механизма, что позволяет пользователю легко наладить свой объект. Объектом может быть стол, или лестница, или любой другой объект, в котором полезны выдвижные ножки, например штатив.
Поддерживающий элемент можно собирать относительно быстро и легко. Сборка будет описана со ссылками на фиг.4 и 5. Сначала можно подготовить второй элемент 20 ножки. Пруток 33 можно вставить в корпус 32, заведя нижний конец прутка 33 в верхнее отверстие корпуса 32. На этом этапе можно установить две собачки 34, 35 и две пружины 38, 39. Когда пруток окажется на месте, на пруток можно установить пружину 44. Далее, можно прикрепить нижнюю часть 41 второго элемента 40 ножки. Затем в корпус можно установить трансмиссионную штангу 31, вставив ее в предназначенное для этого отверстие в верхней части корпуса 32. Также устанавливается пружина 43. Когда штанга 31 и пружина 43 установлены на место, к шарниру 51 можно подсоединить кулачок 36. Кроме того, можно установить направляющий блок 46. Специалистам очевидно, что установка прутка 33 и трансмиссионной штанги 31 может производиться в ином порядке. Комбинацию запирающего механизма 30, второго элемента 20 ножки, и трансмиссионной штанги 31 с направляющим блоком 46 можно вставить в пустотелый первый элемент 22 ножки. Этот пустотелый первый элемент ножки может быть выполнен как экструдированный профиль. Корпус 32 и другие детали можно выровнять известным способом, а затем прикрепить ко второму элементу ножки крепежными средствами, например заклепками.
На фиг.8а показан еще один вариант ножки или поддерживающего элемента 100, имеющего запирающий элемент 101. Корпус 102 установлен в первом элементе 103 ножки. Трансмиссионный элемент 104 образован штангой. Она может быть соединена с центральным управляющим механизмом, находящимся на расстоянии от запирающего механизма. Благодаря жесткости штанги движение управляющего механизма можно передавать на запирающий механизм 101. Трансмиссионный элемент 104 может перемещаться в осевом направлении в ножке 100 по стрелке 105. Движение может направляться корпусом 102, имеющим соответствующее отверстие, в которое вставлен трансмиссионный элемент 104.
Поджимающий элемент 109 может поджимать трансмиссионный элемент 104 в направлении, показанном стрелкой 110.
Трансмиссионный элемент 104 имеет первый палец 106. Далее имеется шарнир 107, соединенный с кулачком 108. Кулачок 108 лежит на части 112 корпуса.
Из положения, показанного на фиг.8а, трансмиссионный элемент 104 может двигаться в направлении, показанном стрелкой 110, в положение, показанное на фиг.8b. На фиг.8а показано запертое положение запирающего механизма, а на фиг.8b - открытое положение.
Если трансмиссионный элемент 104 переместить, кулачок 108 повернется по стрелке 113 вокруг шарнира 107. Конец 114 кулачка 108 войдет во взаимодействие с собачкой 120. Одновременно палец 106 войдет во взаимодействие с собачкой 121. Собачки 120 и 121 могут иметь конструкцию, аналогичную показанной на фиг.3b.
Концы 123, 124 собачек 120, 121 вставлены в полость в корпусе 102 и собачки могут наклоняться в направлении, показанном стрелками 125, 126, соответственно.
Собачки 120, 121 имеют полости, в которые вставлен второй элемент 130 ножки. Поджимающий элемент 131, например пружина, взаимодействует с корпусом 102 и вторым элементом 130, стремясь раздвинуть ножку или опорный элемент 100 в осевом направлении. Второй элемент 130 ножки телескопически вставлен в первый элемент 103 ножки и имеет возможность скользить в осевом направлении 105.
В положении по фиг.8а полости в собачках 120, 121 наклонены и периметр полостей находится в зацеплении с внешней поверхностью второго элемента 130 ножки. При достаточном наклоне сила зацепления заблокирует второй элемент ножки в запертом положении и ножка или поддерживающий элемент 100 будет иметь фиксированную длину.
Еще один поджимающий элемент 140, также пружина в этом варианте, окружает второй элемент 130 ножки. Поджимающий элемент 140 взаимодействует с обеими собачками 120, 121 и создает направленную в осевом направлении силу, разводящую собачки друг от друга.
В открытом положении по фиг.8b второй элемент 130 ножки может свободно двигаться относительно первого элемента 103 ножки или корпуса 102, и длину ножки 100 можно соответственно регулировать. Поджимающий элемент 131 поджимает второй элемент ножки в направлении выдвижения.
Усилие поджимания в направлении выдвижения, например, может быть численно равно массе поддерживающего элемента 100. В одном из вариантов усилие поджимания численно равно массе рядом с положением равновесия/длины ножки 100. Это дает ощущение "плавания", когда устройство, оснащенное ножкой 100, устанавливается на поверхность.
Второй элемент 130 ножки имеет упор 133, который может взаимодействовать с корпусом 101 для ограничения длины выдвижения.
Из открытого положения по фиг.8b запирающий механизм можно перевести в запертое положение, сдвинув трансмиссионный элемент 104 в осевом направлении, в результате чего собачки наклоняются по стрелкам 125, 126 в сторону друг от друга, под действием поджимающего элемента 140.
В результате отпирания элемент 130 ножки смещаются вверх на расстояние, показанное стрелкой 136. Часть 135 элемента 130 ножки, непосредственно соединенная с этим элементом ножки, направляется рамкой первого элемента 103 ножки и, скользя в ней, поднимается на такое же расстояние 136.
При движении на расстояние 136 вверх поджимающее усилие цилиндрической пружины 131 преодолевается рабочей нагрузкой W. Эту работу может выполнять масса/вес лестницы/стола, оснащенного опорой 100. Вес лестницы/стола теперь поддерживается опорой 100 и, в частности, пружиной 131, что позволяет оператору, толкающему первый элемент 101 ножки, ощутить эффект "плавания".
В одном из вариантов на трансмиссионном элементе может быть установлен еще один палец, расположенный с другой стороны от собачки 121.
В другом варианте вокруг трансмиссионного элемента 104 между собачками 120 и 121 может проходить еще один поджимающий элемент, поджимающий собачки 120, 121 в наклонное положение по фиг.8а.
В показанные варианты могут быть внесены различные изменения, не выходящие за пределы изобретательской идеи. Понятно, что изобретение было описано со ссылками на предпочтительные варианты. Однако эти варианты не ограничивают настоящее изобретение.
Изобретение относится к поддерживающему элементу (2) объекта и направлено на облегчение установки лестницы. Лестница содержит раму, имеющую по меньшей мере три ножки для позиционирования лестницы на поверхности. Каждая из этих по меньшей мере трех ножек выполнена с возможностью индивидуального и выборочного выдвижения для регулировки по длине каждой их этих по меньшей мере трех ножек. Каждая из этих по меньшей мере трех ножек содержит трансмиссионный элемент и запирающий элемент. Запирающий элемент имеет запертое положение для блокирования осевого выдвижения ножки и открытое положение, допускающее осевое выдвижение ножки. Эти по меньшей мере три запирающих элемента соединены с центральным управляющим механизмом через трансмиссионные элементы, а центральный управляющий механизм выполнен с возможностью одновременной активации и деактивации этих по меньшей мере трех запирающих элементов. По меньшей мере две ножки шарнирно соединены друг с другом. 15 з.п. ф-лы, 12 ил.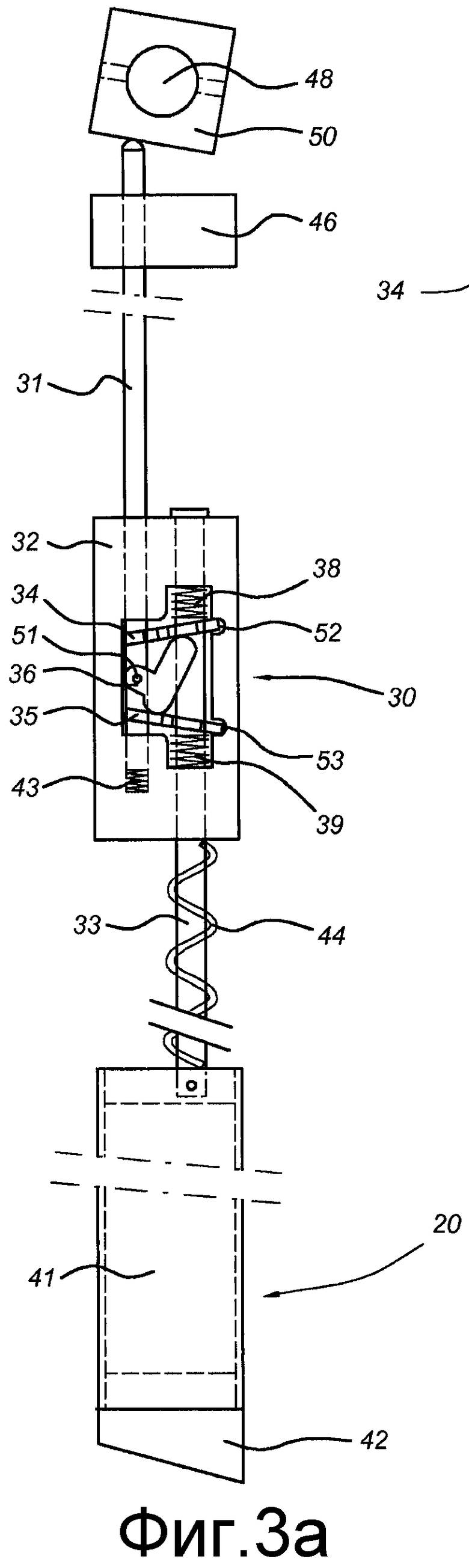
1. Лестница, содержащая раму, имеющую по меньшей мере три ножки (2, 5a-5d) для позиционирования лестницы на поверхности, при этом каждая из этих по меньшей мере трех ножек (2, 5a-5d) выполнена с возможностью индивидуального и выборочного выдвижения для регулировки по длине каждой их этих по меньшей мере трех ножек (2, 5a-5d), при этом каждая из этих по меньшей мере трех ножек (2, 5a-5d) содержит трансмиссионный элемент (31) и запирающий элемент (30), при этом запирающий элемент (30) имеет запертое положение для блокирования осевого выдвижения ножки, и открытое положение, допускающее осевое выдвижение ножки, причем эти по меньшей мере три запирающих элемента соединены с центральным управляющим механизмом (21) через трансмиссионные элементы, а центральный управляющий механизм (21) выполнен с возможностью одновременной активации и деактивации этих по меньшей мере трех запирающих элементов (30), при этом по меньшей мере две ножки (2, 5a-d) шарнирно соединены друг с другом.
2. Лестница по п.1, в которой управляющий механизм (21) содержит управляющую рукоятку (3, 61), соединенную со штангой (18, 68), которая прикреплена к раме с возможностью вращения, при этом штанга (18, 68) содержит по меньшей мере два толкателя (62), расположенные на расстоянии друг от друга, причем каждый толкатель (62) расположен для взаимодействия с одним из трансмиссионных элементов (63), причем управляющий механизм (21, 60) расположен так, что поворот штанги (18) вращением управляющей рукоятки (3, 61) приводит к поступательному движению трансмиссионного элемента (63) под действием толкателей (62), и трансмиссионный элемент (63) расположен так, что поступательное движение трансмиссионного элемента (63) приводит к наклону собачки (34) запирающего элемента (30).
3. Лестница по п.1 или 2, в которой устройство (1) содержит поддерживающую платформу (7), от которой вниз отходят по меньшей мере три ножки.
4. Лестница по п.1 или 2, в которой ножка (2, 5a-5d) содержит первый элемент (22) ножки и второй элемент (20) ножки, причем первый элемент (22) ножки выполнен с возможностью осевого перемещения относительно второго элемента (20) ножки для выдвижения ножки (2, 5a-5d), при этом первый элемент (22) ножки содержит корпус (32), в который может быть вставлен с возможностью скольжения второй элемент (20) ножки и в котором в корпус (32) вставлен запирающий элемент (30), при этом запирающий элемент (30) содержит собачку (34), выполненную с возможностью наклона в корпусе (32) для поочередного занятия запертого положение и открытого положения запирающего элемента (30), причем собачка (34) содержит полость (40), в которую вставлен второй элемент (20) ножки, причем собачка (34) содержит стопорную поверхность (47), окружающую периметр полости (40), и стопорная поверхность (47) выполнена с возможностью зацепления с по меньшей мере двумя противоположными частями периметра второго элемента (20) ножки в запертом положении запирающего элемента (30).
5. Лестница по п.4, в которой продольная ось полости (40) проходит параллельно второму элементу (20) ножки в открытом положении.
6. Лестница по п.4, в которой еще один поджимающий элемент (38, 39) поджимает собачку (34) к запертому положению.
7. Лестница по п.4, в которой запирающий элемент (30) содержит дополнительную собачку (35), выполненную с возможностью наклона в корпусе (32) для поочередного занятия запертого положения и открытого положения запирающего элемента (30), при этом дополнительная собачка (35) содержит полость (40), в которую вставлен второй элемент (20) ножки, а собачка (35) содержит стопорную поверхность (47), окружающую периметр полости (40), причем стопорная поверхность (47) выполнена с возможностью зацепления с по меньшей мере двумя противоположными частями периметра второго элемента (20) ножки в запертом положении запирающего элемента (30), причем стопорные поверхности (47) собачек (34, 35) окружают разные в продольном направлении части второго элемента (20) ножки.
8. Лестница по п.7, в которой собачка (34) и дополнительная собачка (35) расположены для наклона в противоположных направлениях к запертому положению.
9. Лестница по п.8, в которой между собачкой (34) и дополнительной собачкой (35) установлен поджимающий элемент, отжимающий собачки (34, 35) друг от друга.
10. Лестница по п.9, в которой поджимающий элемент расположен вокруг элемента (20, 22) ножки.
11. Лестница по пп.7 или 8, в которой запирающий элемент (30) содержит кулачок (36), расположенный в корпусе (32), причем противоположные стороны (141, 142) кулачка (36) взаимодействуют с двумя собачками (34, 35), и в котором кулачок (36) выполнен с возможностью одновременно наклонять две собачки (34, 35) из запертого положения в открытое положение.
12. Лестница по п.4, в которой корпус также содержит кулачок (36), взаимодействующий с собачкой (34), для перевода собачки (34) из запертого положения в открытое положение.
13. Лестница по пп.11 и 12, в которой трансмиссионный элемент (31) соединен с кулачком (36).
14. Лестница по любому из пп.1, 2, 5-10, 12, в которой ножка (2, 5a-d) содержит первый элемент (22) ножки и телескопический второй элемент (20) ножки.
15. Лестница (2) по любому из пп.1, 2, 5-10, 12, в которой ножка (2, 5a-d) также содержит поджимающий элемент (44) для поджимания ножки (2, 5a-d) к полностью выдвинутому положению.
16. Лестница по пп.1, 2, 5-10, 12, в которой дополнительный поджимающий элемент (38, 39) поджимает запирающий элемент (30) к запертому положению.
| US 2911134 A, 03.11.1959 | |||
| DE 9406942 U1, 18.08.1994 | |||
| US 5595410 A, 21.01.1997 | |||
| Способ интраоперационной профилактики эректильной дисфункции и недержания мочи у пациентов после нервосберегающей радикальной простатэктомии без лимфодиссекции | 2022 |
|
RU2806723C1 |
| ЛЕСТНИЦА-СТРЕМЯНКА^^^rcqjo-^TtA,. I,--' • -- - t; ; , -'^-'-'J. ;•/-. ^ )I '' •--н;ртс;:-д^ ^ - />& K--^^l-f:-',r--- ' I^—-..-_.:i'"'"'-'' I | 1972 |
|
SU435342A1 |

