Изобретение относится к системе определения положения объекта, использующей радиосигналы или другие радиоинформационные передачи в инфраструктуре мобильной связи.
Известно устройство по определению местоположения объекта с использованием сигналов инфраструктуры мобильной связи и содержащее две приемные станции, причем первая из приемных станций находится в известном местоположении, а вторая расположена на подвижном объекте, процессор определения положения, средство для пересылки сигнала связи от каждой из приемных станций в процессор определения положения (патент №2137150, G01S 5/02, Н04В 7/26). Недостатком данного устройства является низкая точность определения местоположения объекта: несколько метров.
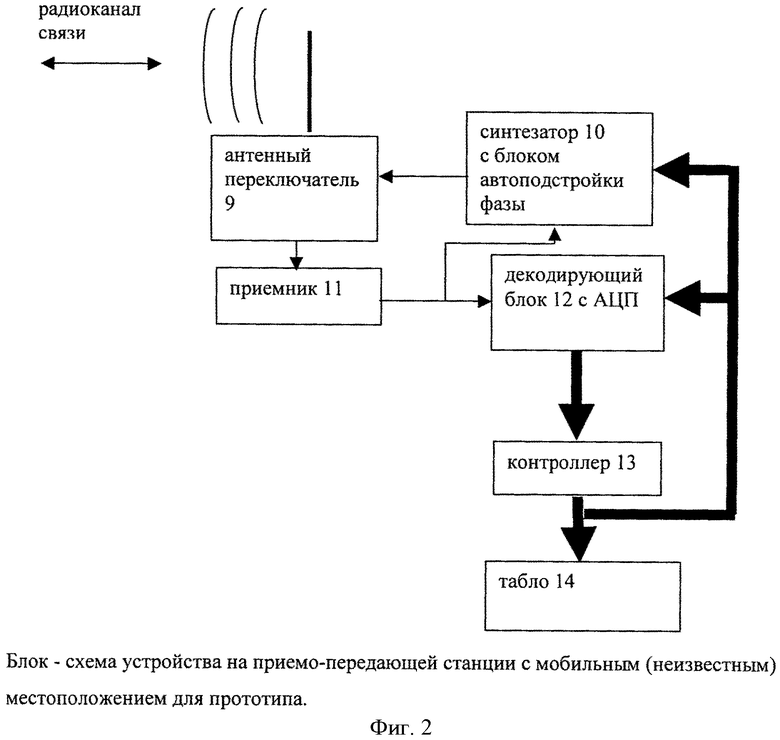
Наиболее близким техническим решением к заявляемому устройству является устройство, описанное в [1]. Оно содержит на приемо-передающей станции с известным местоположением излучатель-ретранслятор 1, блок 2 синхронизации, синтезатор 3 с блоком автоподстройки фазы, контроллер 4, блок 5 кодирования смещения вершины вышки, цифровые камеры 6 слежения, фазовращатель 7, измеритель 8 метеопараметров. Причем управляющий вход излучателя-ретранслятора соединен с выходом блока кодирования смещения вершины вышки, цифровой вход которого соединен с цифровым выходом контроллера, цифровой вход которого соединен с цифровым выходом измерителя метеопараметров и цифровым выходом цифровых камер слежения, цифровой вход которых соединен с цифровым выходом контроллера, цифровой выход которого соединен также с цифровыми входами синтезатора с блоком автоподстройки фазы и цифровым входом фазовращателя, вход которого соединен с выходом синтезатора с блоком автоподстройки фазы, вход которого соединен с выходом блока синхронизации, а выход фазовращателя соединен с входом излучателя-ретранслятора, выход которого соединен с входом блока 2 синхронизации. На приемо-передающей станции с мобильным (неизвестным) местоположением устройство содержит: антенный переключатель 9, синтезатор 10 с блоком автоподстройки фазы, приемник 11, декодирующий блок 12 с аналого-цифровым преобразователем (АЦП), контроллер 13, табло 14. Выход антенного переключателя соединен с входом приемника, выход которого соединен с входом декодирующего блока с АЦП и с входом синтезатора с блоком автоподстройки фазы, цифровой вход которого соединен с цифровым входом декодирующего блока с АЦП и с цифровым выходом контроллера и с цифровым входом табло, выход синтезатора с блоком автоподстройки фазы соединен с входом антенного переключателя. Обе приемо-передающие станции связаны между собой радиоканалом связи.
Устройство работает следующим образом. Цифровые фотокамеры слежения, установленные на бетонных основаниях на земле и являющиеся реперными точками для рассматриваемой ретрансляционной вышки, отслеживают горизонтальные и вертикальные смещения вершины ретрансляционной вышки. Цифровые сигналы, пропорциональные этим смещениям, передаются в контроллер, а из него сигналы, пропорциональные вертикальным смещениям вершины, управляют фазовращателем 7, а сигналы, пропорциональные горизонтальным смещениям вершины с помощью блока 5 кодирования, передаются в излучатель-ретранслятор, который передает сигналы, пропорциональные горизонтальным смещениям, к приемо-передающей станции с мобильным местоположением, где они обрабатываются и учитываются при определении местоположения объекта. Контроллер 4 также управляет по цифровому выходу синтезатором 3 частоты с автоподстройкой фазы, а по цифровому входу принимает данные о метеопараметрах от измерителя 8 метеопараметров с целью корректировки местоположения объекта позиционирования. Блок 2 синхронизации осуществляет синхронизацию по фазе синтезатора 3 по сигналам одной из ретрансляционных вышек, называемой опорной или по сигналам точного времени. Метеопараметры атмосферы необходимо точно учитывать при расчете геометрических длин от вершины вышки до объекта позиционирования. Таким образом, к объекту позиционирования поступает радиосигнал, несущий информацию о горизонтальных смещениях вершин вышек и метеопараметрах. На объекте позиционирования декодирующий блок 12 с АЦП с помощью антенного переключателя 9, синтезатора 10 и приемника 11 осуществляет прием сигналов, передачу их в контроллер 13, где происходит их обработка и расчет местоположения объекта позиционирования, которое выводится на табло 14.
Недостатком данного устройства является низкая точность определения местоположения объекта позиционирования из-за изменчивости метеопараметров атмосферы и неточного определения из-за этого геометрических расстояний от вершин ретрансляционных вышек до объекта позиционирования. Точность позиционирования составляет 10-20 мм, что недостаточно для использования, например в деформационных измерениях высотных сооружений.
Техническим результатом изобретения является повышение точности позиционирования подвижных объектов.
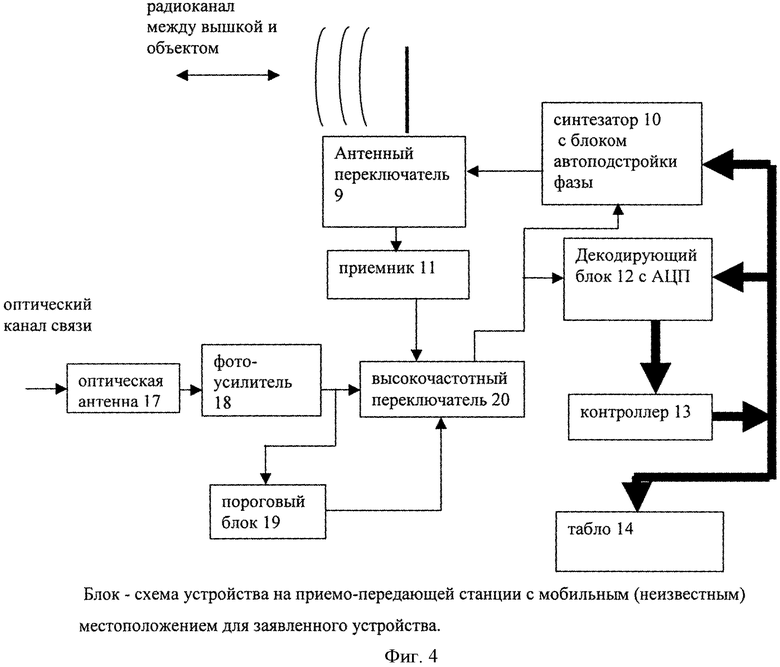
Указанный технический результат достигается тем, что в устройство, содержащее на приемо-передающей станции с известным местоположением излучатель-ретранслятор 1, блок 2 синхронизации, синтезатор 3 с блоком автоподстройки фазы, контроллер 4, блок 5 кодирования смещения вершины вышки, цифровые камеры 6 слежения, фазовращатель 7, измеритель 8 метеопараметров, а на приемо-передающей станции с мобильным (неизвестным) местоположением: антенный переключатель 9, синтезатор 10 с блоком автоподстройки фазы, приемник 11, декодирующий блок 12 с аналого-цифровым преобразователем (АЦП), контроллер 13, табло 14, причем управляющий вход излучателя-ретранслятора соединен с выходом блока кодирования смещения вершины вышки, цифровой вход которого соединен с цифровым выходом контроллера, цифровой вход которого соединен с цифровым выходом измерителя метеопараметров и цифровым выходом цифровых камер слежения, цифровой вход которых соединен с цифровым выходом контроллера, цифровой выход которого соединен также с цифровыми входами синтезатора с блоком автоподстройки фазы и цифровым входом фазовращателя, вход которого соединен с выходом синтезатора с блоком автоподстройки фазы, вход которого соединен с выходом блока синхронизации, а выход фазовращателя соединен с входом излучателя-ретранслятора, выход которого соединен с входом блока 2 синхронизации, выход антенного переключателя соединен с входом приемника, цифровой вход синтезатора с блоком автоподстройки фазы соединен с цифровым входом декодирующего блока с АЦП, с цифровым выходом контроллера и с цифровым входом табло, выход синтезатора с блоком автоподстройки фазы соединен с входом антенного переключателя, введены: на приемо-передающей станции с известным местоположением - блок 15 модуляции и оптический излучатель 16, а на приемо-передающей станции с мобильным местоположением - оптическая антенна 17, фотоусилитель 18, пороговый блок 19, высокочастотный переключатель 20, причем выход фазовращателя соединен с входом блока модуляции, выход которого соединен с входом оптического излучателя, выход приемника 11 соединен с входом высокочастотного переключателя, выход которого соединен с входом декодирующего блока с АЦП и с входом синтезатора с блоком автоподстройки фазы, оптический выход оптического излучателя соединен с оптическим входом оптической антенны, выход которой соединен с входом фотоусилителя, выход которого соединен с входами высокочастотного переключателя и порогового блока, выход которого соединен с управляющим входом высокочастотного переключателя.
На чертежах изображены приемник и передатчик прототипа, фиг.1, 2, и заявляемого устройства, фиг.3, 4.
Устройство работает следующим образом. Цифровые фотокамеры слежения, установленные на бетонных основаниях на земле и являющиеся реперными точками для рассматриваемой ретрансляционной вышки, отслеживают горизонтальные и вертикальные смещения вершины ретрансляционной вышки. Цифровые сигналы, пропорциональные этим смещениям, передаются в контроллер, а из него сигналы, пропорциональные вертикальным смещениям вершины, управляют фазовращателем 7, а сигналы, пропорциональные горизонтальным смещениям вершины с помощью блока 5 кодирования, передаются в излучатель-ретранслятор, который передает сигналы, пропорциональные горизонтальным смещениям, к приемо-передающей станции (объекту) с мобильным местоположением, где они обрабатываются и учитываются при определении местоположения объекта. Контроллер 4 также управляет по цифровому выходу синтезатором 3 частоты с автоподстройкой фазы, а по цифровому входу принимает данные о метеопараметрах от измерителя 8 метеопараметров с целью корректировки местоположения объекта позиционирования. Блок 2 синхронизации осуществляет синхронизацию по фазе синтезатора 3 по сигналам одной из ретрансляционных вышек, называемой опорной или по сигналам точного времени. Блок.15 модуляции модулирует оптический излучатель 16, излучающий оптические несущие в диапазоне 0.4-0.6 мкм. Оптические расстояния L1, L2 от конкретной вышки до объекта записываются следующим образом:


где D - геометрическое расстояние до объекта, f(λ) - функция, зависящая от длины волны света [2], P и T - соответственно среднее давление и температура воздуха. Из уравнений (1) и (2) можно определить среднюю на трассе величину P/T по формуле:

а геометрическое расстояние определяется из (1), (2) и (3) следующим образом:

и, как видно, не зависит от атмосферных условий.
То есть, если в условиях прямой видимости существует возможность приема оптического сигнала в диапазоне λ1÷λ2, то получаемое расстояние от излучателя до объекта, определенное только по оптическим сигналам, не зависит в первом приближении от метеоусловий вообще. При этом точность определения геометрического расстояния D, как видно из (4), может составлять ~1 мм при точности измерения L1, L2 ~0.3-0.05 мм, поскольку величина 
На объекте позиционирования декодирующий блок 12 с АЦП с помощью антенного переключателя 9, синтезатора 10 и приемника 11 осуществляет прием сигналов, передачу их в контроллер 13, где происходит их обработка и расчет местоположения объекта позиционирования, которое выводится на табло 14. Оптическая антенна 17 принимает оптические сигналы с сотовых вышек, фотоусилитель 18 усиливает эти сигналы и передает в высокочастотный переключатель 20, который в зависимости от величины оптического сигнала пропускает к декодирующему блоку 12 с АЦП либо сигналы, переданные по оптическому, либо по радиоканалу. Если сигналы, переданные по оптическому каналу ниже порогового уровня, то пороговый блок 19 дает команду на высокочастотный переключатель 20, который начинает пропускать сигналы, переданные по радиоканалу к декодирующему блоку 12 с АЦП.
При достаточном оптическом сигнале метеопараметры атмосферы необходимо лишь грубо оценивать при расчете геометрических длин от вершины вышки до объекта позиционирования, поскольку, как уже было показано выше, геометрическая длина D в первом приближении не зависит от атмосферных параметров, формула (4).
Таким образом, в основе повышения точности позиционирования лежит добавление двух оптических несущих частот не только к передатчику опорной вышки, осуществляющему фазирование разнесенных синтезаторов, но и ко всем передатчикам всех вышек, осуществляющих мобильную связь. Соответственно мобильные приемники должны иметь фотоприемник, осуществляющий прием и обработку сигналов оптических несущих. Поскольку средние метеопараметры в радиусе 10 км по метеодатчикам можно определить лишь приближенно с точностью в единицы градусов по температуре и в единицы миллибар по давлению и влажности воздуха, то в прототипе точность позиционирования объектов не превышает 10-20 мм. В заявляемом устройстве с добавленным оптическим каналом достаточно лишь грубо оценивать метеопараметры, и при этом достигнутые точности позиционирования составляют 1-2 мм.
СПИСОК ЛИТЕРАТУРЫ
1. Григорьевский В.И., Григорьевская М.В., Яковлев Ю.О. Оценка точности позиционирования объектов с помощью инфраструктуры мобильной связи. Метрология, 2011, №8, с.33-42.
2. Д.Оуэнс. Применение лазеров, М., Мир, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОГО ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2015 |
|
RU2595328C1 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| СОВМЕЩЕННАЯ СИСТЕМА РАДИОЛОКАЦИИ И СВЯЗИ НА РАДИОФОТОННЫХ ЭЛЕМЕНТАХ | 2018 |
|
RU2697389C1 |
| СПОСОБ И УСТРОЙСТВО ВЫСОКОСКОРОСТНОЙ И НИЗКОСКОРОСТНОЙ СВЯЗИ ЧЕРЕЗ СПУТНИКИ НА НИЗКИХ И СРЕДНИХ ОРБИТАХ | 1997 |
|
RU2133555C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФАЗЫ РАДИОСИГНАЛА | 1991 |
|
RU2048677C1 |
| СТАНЦИЯ РАДИОРЕЛЕЙНОЙ СВЯЗИ С МНОГОКАНАЛЬНЫМ РАДИОЧАСТОТНЫМ МОДУЛЕМ И НЕПРЕРЫВНЫМ СКАНИРОВАНИЕМ ЛУЧА И СПОСОБ ЭЛЕКТРОННОГО СКАНИРОВАНИЯ | 2018 |
|
RU2669264C1 |
| ДИСПЕРСИОННЫЙ ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2007 |
|
RU2353901C1 |
| Способ обнаружения и высокоточного определения параметров морских ледовых полей и радиолокационная система для его реализации | 2019 |
|
RU2723437C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2389054C1 |
| УСТРОЙСТВО ИСКАЖЕНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 2014 |
|
RU2605205C2 |

Изобретение относится к системе определения положения объекта, использующей радиосигналы или другие радиоинформационные передачи в инфраструктуре мобильной связи. Технический результат состоит в повышении точности определения координат объекта путем определения геометрических длин от вышек до объекта. Для этого в устройстве реперными точками с известными координатами являются ретрансляционные вышки сотовой мобильной связи, причем их координаты корректируются с помощью цифровых камер слежения, установленных на массивных основаниях непосредственно на земле. Изменчивость метеопараметров на трассах распространения сигналов является основным источником погрешностей определения координат объектов. В дополнение к радиоинформационным сигналам, передаваемым к подвижному объекту, добавляются оптические сигналы в диапазоне максимальной дисперсии атмосферы, по которым определяются с высокой точностью метеопараметры непосредственно на трассах распространения оптических и радиосигналов. Устройство содержит излучатель-ретранслятор, блок синхронизации, синтезатор с блоком автоподстройки фазы, контроллер, блок кодирования смещения вершины вышки, цифровые камеры слежения, фазовращатель, измеритель метеопараметров, антенный переключатель, синтезатор с блоком автоподстройки фазы, приемник, декодирующий блок с аналого-цифровым преобразователем (АЦП), контроллер, табло, блок модуляции, оптический излучатель, оптическую антенну, фотоусилитель, пороговый блок, высокочастотный переключатель. 4 ил.
Устройство высокоточного позиционирования подвижных объектов, содержащее на приемо-передающей станции с известным местоположением излучатель-ретранслятор, блок синхронизации, синтезатор с блоком автоподстройки фазы, контроллер, блок кодирования смещения вершины вышки, цифровые камеры слежения, фазовращатель, измеритель метеопараметров, а на приемо-передающей станции с мобильным (неизвестным) местоположением: антенный переключатель, синтезатор с блоком автоподстройки фазы, приемник, декодирующий блок с аналого-цифровым преобразователем (АЦП), контроллер, табло, причем управляющий вход излучателя-ретранслятора соединен с выходом блока кодирования смещения вершины вышки, цифровой вход которого соединен с цифровым выходом контроллера, цифровой вход которого соединен с цифровым выходом измерителя метеопараметров и цифровым выходом цифровых камер слежения, цифровой вход которых соединен с цифровым выходом контроллера, цифровой выход которого соединен с цифровыми входами синтезатора с блоком автоподстройки фазы и фазовращателя, вход которого соединен с выходом синтезатора с блоком автоподстройки фазы, вход которого соединен с выходом блока синхронизации, а выход фазовращателя соединен с входом излучателя-ретранслятора, выход которого соединен с входом блока синхронизации, выход антенного переключателя соединен с входом приемника, цифровой вход синтезатора с блоком автоподстройки фазы соединен с цифровым входом декодирующего блока с АЦП, с цифровым выходом контроллера и с цифровым входом табло, выход синтезатора с блоком автоподстройки фазы соединен с входом антенного переключателя, отличающееся тем, что в него введены: на приемо-передающей станции с известным местоположением - блок модуляции и оптический излучатель, а на приемо-передающей станции с мобильным местоположением - оптическая антенна, фотоусилитель, пороговый блок, высокочастотный переключатель, причем выход фазовращателя соединен с входом блока модуляции, выход которого соединен с входом оптического излучателя, выход приемника соединен с входом высокочастотного переключателя, выход которого соединен с входом декодирующего блока с АЦП и с входом синтезатора с блоком автоподстройки фазы, оптический выход оптического излучателя соединен с оптическим входом оптической антенны, выход которой соединен с входом фотоусилителя, выход которого соединен с входами высокочастотного переключателя и порогового блока, выход которого соединен с управляющим входом высокочастотного переключателя.
| КОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ЗА ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2284550C2 |
| Загрузочный бункер | 1933 |
|
SU37234A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2005 |
|
RU2302698C2 |
| НАНОМЕТРИЧЕСКОЕ ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО | 2002 |
|
RU2233736C2 |

