Изобретение относится к области определения координат подвижных объектов (ПО) с использованием комплексного способа навигации, функционально объединяющего инерциальный способ и спутниковый, и может быть использовано при высокоточном позиционировании ПО, а также при осуществлении полета летательного аппарата (ЛА) в сложных навигационных условиях, характеризующихся повышенным уровнем изменчивости состава рабочего созвездия навигационных спутников.
Известен спутниковый способ навигации ПО по N навигационным спутникам (НС) Земли, формирующим рабочее созвездие, который включает прием сигналов НС на борту ПО и вычисление по этим сигналам навигационных параметров ПО [1-3]. Но в ряде случаев, из-за нестандартных условий приема сигналов НС (частичное затенение или большой наклон приемной антенны ПО), точность навигационных определений существенно падает и при некоторых значениях указанных факторов спутниковые определения координат становятся невозможными, т.к. в зону радиовидимости антенны ПО попадает недостаточное количество НС. При восстановлении нормального режима перемещения ПО происходит снова поиск НС, слежение за ними, выделение информации и измерение параметров, по которым определяются псевдодальности и псевдоскорости для каждого "видимого" НС. Такой режим работы аппаратуры обладает дополнительным уменьшением времени непрерывных местоопределений, что может повлиять на выполнение целевых задач ПО. Кроме того, при изменении состава рабочего созвездия в оценках координат появляются разрывы непрерывности второго рода, скачки, что усложняет работу устройств, на вход которых подаются данные навигационных определений.
Одним из способов повышения точности навигационных определений в подобных нештатных ситуациях является комплексное использование спутникового способа навигации (ССН) и инерциального способа навигации (ИСН), осуществляемого инерциальной системой на борту ПО [4-8].
В патентах [4-7] при комплексировании данных от ССН и ИСН используются данные от спутниковой системы при любом составе рабочего созвездия. Координаты и скорости их изменения определяются в результате совместной обработки всей имеющейся информации, поступающей от ССН и ИСН. Однако недостатками, присущими этим способам, являются отсутствие возможности управления рабочим созвездием НС с учетом угловой ориентации ПО и недостаточно точное представление этого способа (в виде корреляционной матрицы погрешности) при комплексировании информации ССН и ИСН, что приводит к уменьшению точности и достоверности навигационных определений, особенно опасных в сложных навигационных условиях, т.к. изменение состава рабочего созвездия НС сопровождается скачкообразными переходными процессами, приводящими к снижению точности и непрерывности оценивания координат ПО комплексным инерциально-спутниковым способом навигации.
Способ инерциально-спутниковой навигации, защищенный патентом [8], является прототипом заявляемого изобретения. Способ-прототип состоит в том, что производится совместная обработка данных о положении ЛА, формируемых независимо инерциальными датчиками (ИД), вырабатывающими векторы угловой скорости и ускорения ЛА, барометрическим высотомером и спутниковым приемником с известным альманахом спутников, при этом во входной обработке формируют данные о положении ЛА инерциальным способом, параллельно выделяют данные о положении ЛА, определяемые спутниковым способом, а в выходной обработке на основе упомянутых оценок инерциального и спутникового способов выполняют оценку ошибок инерциального способа с помощью расширенного фильтра Калмана (ФК), и далее, выполняя коррекцию ошибок ИСН во входной обработке, уточняют положение ЛА в выходной обработке; кроме того, между входной и выходной обработками производят промежуточную обработку, включающую формирование данных рабочего созвездия на основе уточненного положения ЛА и информации об ориентации ЛА, альманахе спутников, диаграмме направленности антенны приемника, а также формирование корреляционной матрицы ошибок измерений. Проводят формирование векторов направления на спутники, используя информацию об ориентации ЛА.
Таким образом, учет ориентации ЛА и введение промежуточной обработки позволяют уточнить положение ЛА, определяемое комплексным инерциально-спутниковым способом.
Хотя известные способы позволяют осуществлять навигацию ПО при любом составе рабочего созвездия, а координаты и скорости их изменения определяются в результате совместной обработки всей имеющейся информации, поступающей от НС и ИД, этим способам присущ общий недостаток - не исключена возможность потери радионаблюдений НС из-за чрезвычайных ситуаций: затенение или большой наклон приемной антенны ПО, а также возможное влияние на точность и качество навигационного сигнала со стороны управляющих, враждебно (из-за "санкций") настроенных, опорных станций сопровождения иностранных государств.
Другим недостатком способа-прототипа может являться недостаточно высокая точность позиционирования, необходимая для выполнения ряда специальных задач, а также снижение точности оценивания координат ПО в сложных навигационных условиях (большие ионосферные помехи, влияние многолучевости, погрешности задания эфемерид НС и т.д.).
Задачей заявляемого способа является повышение точности оценивания координат ПО в сложных навигационных условиях благодаря формированию локальной дифференциальной навигационной системы (ЛДНС).
Поставленная задача решается следующим образом.
Предлагается разместить несколько аэростатных подвесок (АП) между орбитами НС и траекториями ПО, на высоте 35-60 км от поверхности Земли, т.е. на высоте достаточно спокойной атмосферы (стратосферы).
Эти АП необходимо радио- и оптическими каналами связать между собой и с контрольно-корректирующей станцией (ККС), а также связать с ПО. ККС геодезически точно привязывают к принятой местной системе координат и далее формируют ЛДНС с зоной кругового обзора на поверхности Земли одной АП от 100 до 200 км. Радиооптические каналы используют для синхронизации работы генераторов на двух близких частотах F1 и F2, а также в области длин волн света 0,4-0,6 мкм. Таким образом осуществляют временную (фазовую) синхронизацию разнесенных синтезаторов передатчиков АП и ПО, а также передают ПО информацию о координатах перемещения АП, метеопараметрах и другую необходимую информацию (например, рекомендации по выбору созвездия рабочих АП).
В отличие от ССН, ЛДНС работает в запросном режиме, по закодированным командам с ПО и ККС. На борту АП осуществляют как определение собственных координат АП, так и созвездия НС и ПО (по сигналам передатчиков ПО), при этом используют как сигналы дальности, так и сигналы относительной скорости при доплеровском смещении частоты. По сигналам с ККС и ПО осуществляется коррекция координат местоположения и скорости АП и ПО. Для этого на борту ПО и АП производится совместная независимая обработка всей поступающей информации с использованием вычислений в местной системе координат и с помощью ИНС, ориентация которой корректируется по звездам и по созвездию НС.
Для создания ЛДНС используют несколько АП, окружающих ККС, расположенную в центре рабочей зоны ПО и АП. Кроме того, сама ККС может быть выполнена как в стационарном, так и в передвижном варианте; главное - она должна быть геодезически точно привязана к принятой системе координат. На борту АП также может быть использована оптическая аппаратура для наблюдения и слежения за звездами с целью коррекции ИНС и местной декартовой системы координат, а также стабилизированная в инерциальном пространстве платформа.
В [9] предлагается использование сети ретрансляционных вышек и одной опорной (реперной) вышки для решения задач контроля наземных объектов. Функции вышек в случае высокоточного позиционирования могут быть успешно выполнены сетью АП, а задачи реперной вышки - рабочей ККС, которая устанавливается в центре рабочей зоны ЛДНС.
При погрешностях определения координат с применением оптического излучателя в 1-2 мм вполне реальна задача позиционирования объектов с погрешностью около 2-3 мм [9].
ККС излучает не только сигналы для ПО, которые нужно позиционировать, но и синхросигналы для АП. При этом для повышения точности используются две оптические несущие частоты для всех передатчиков ЛДНС. В соответствии с этим в состав приемников должны входить фотоприемники, осуществляющие прием и обработку сигналов оптических несущих.
Предлагается также конструктивно АП выполнить таким образом, чтобы для работы с рабочим созвездием НС использовать систему антенн, расположенных в верхней части АП и обслуживающих верхнюю полусферу атмосферы, а для наблюдений и работы с наземными объектами использовать антенны, расположенные в нижней части АП и направленные вниз.
Кроме того, для решения задач геодезии, картографии и спецзадач (например, измерение высоты полета АП и др.) предлагается на борту АП использовать высокоточный абсолютный, стабилизированный в местной системе координат (X,Y,Z) гравиметр.
Также предлагается использовать на АП специальную оптическую аппаратуру для наблюдения за поверхностью и фотографирования объектов по команде с опорной ККС.
С применением АП возможно осуществлять наблюдения за атмосферой и ионосферой и прогнозировать погодные изменения, влекущие в том числе ухудшения видимости и радиосвязи.
Эксплуатация ЛДНС допускает разные режимы работы:
1 - совместная работа ИСН, ССН, ЛДНС, когда работают одновременно приемопередатчики, обслуживающие верхнюю и нижнюю полусферы;
2 - автономный режим, когда для высокоточного позиционирования используются приемопередатчики АП, направленные вниз, т.е. реализуется только ЛДНС с использованием инфраструктуры сотовой связи. В этом режиме ЛДНС структурно может быть реализована двумя вариантами:
- ЛДНС состоит из 4-5 АП и одной опорной (реперной) ККС. Общая зона обзора при этом составит от 400 до 1000 км;
- ЛДНС состоит из одной АП и одной опорной ККС и 3-4 передвижных ретрансляционных ККС в пределах оптической видимости. Общая зона обзора при этом составит до 200 км при благоприятных рельефных и метеоусловиях.
В принципе, с помощью сети ЛДНС можно обеспечить высокоточным позиционированием всю территорию РФ.
Учитывая, что запуск АП в стратосферу намного экономичнее запуска ИСЗ, целесообразно при выходе АП из рабочей зоны, по команде с ККС, осуществлять мягкую посадку АП с последующей проверкой работоспособности аппаратуры и обновлением ячеек памяти и программы. После этого можно производить повторный запуск АП в новой рабочей зоне.
Для создания АП могут быть использованы материалы и покрытия, маскирующие АП от наблюдения ее в стратосфере.
Суть заявляемого способа поясняется с помощью фиг. 1-4.
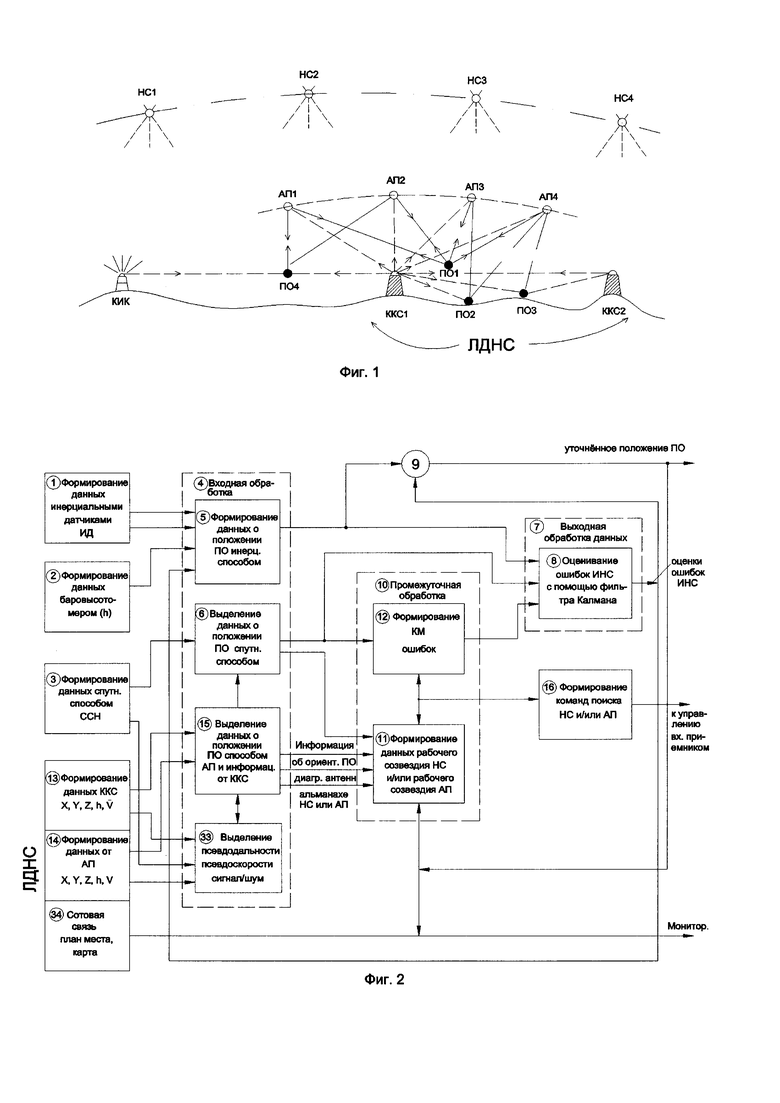
На фиг. 1 показана схема связи и взаимодействия объектов способа.
На фиг. 2 представлена блок-схема основной последовательности операций способа.
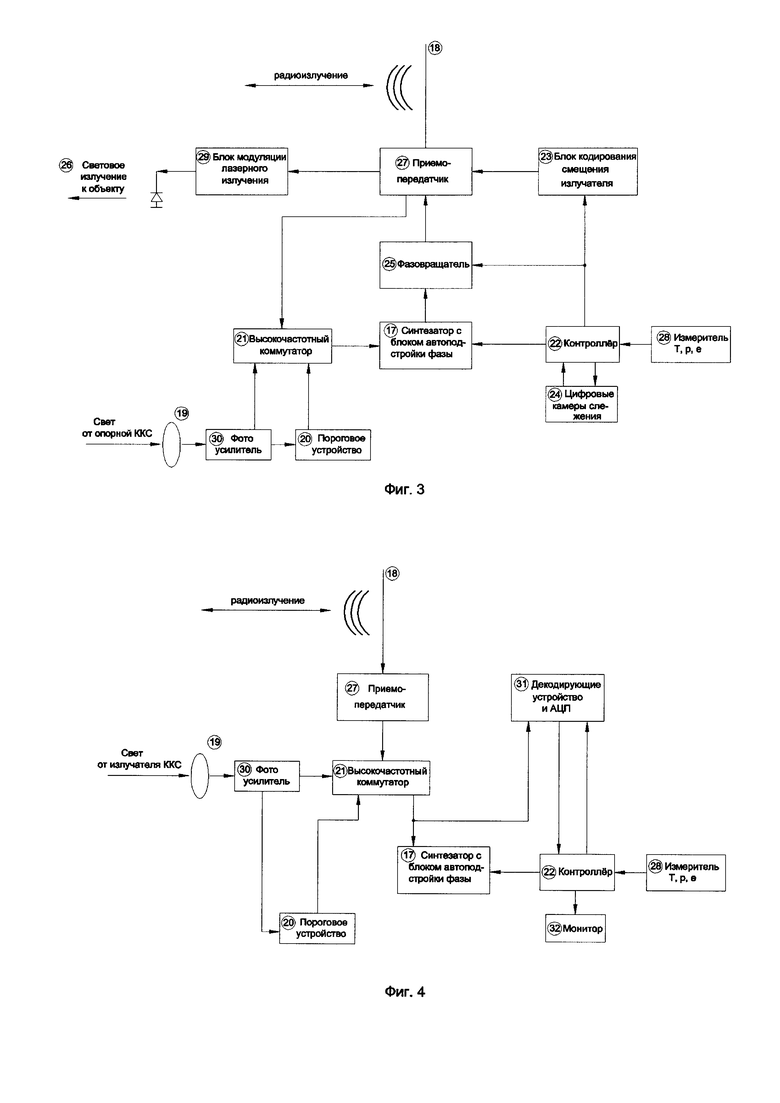
На фиг. 3 показан вариант [9] функциональной схемы системы позиционирования, с радио- и оптическим каналами связи, распложенными на ККС и АП.
На фиг. 4 представлена функциональная схема приемной системы позиционирования, расположенной на ПО.
Способ согласно фиг. 1 включает характерные для способа-прототипа связи и взаимодействия НС с контрольно-измерительным комплексом (КИК) и с подвижным объектом ПО, поэтому на фиг. 1 они не показаны подробно.
Предложены новые операции, реализующие заявленный способ. Новизна способа состоит в том, что между орбитами НС и ПО размещают АП, радио- и оптически связанную с ПО и с ККС, которая точно привязана к местной системе координат. С помощью нескольких АП и ККС формируют, таким образом, ЛДНС с зоной обзора 100-200 км. Необходимые угловые распределения оптических сигналов обеспечиваются широкоугольными объективами, сканирующими в пространстве оптической системы.
ККС-1 является при этом опорной (реперной) станцией. Она выполняет роль фазирования разнесенных генераторов с использованием двух оптических несущих частот в диапазоне волн 0,4-0,6 мкм. ККС-1 излучает не только сигналы для ПО, которые нужно позиционировать, но и синхросигналы для АП-1 - АП-4. Погрешность слежения за перемещением оптических излучателей на АП-1 указанным способом составляет менее 1 мм по двум горизонтальным координатам и передается в закодированном виде на радиочастоте к другим АП и ПО.
Ниже приводится сокращенное математическое обоснование достижимой точности способа.
Геометрическое расстояние до объекта можно определить по формуле [10].

где L1, L2 - оптические расстояния от излучателя до ПО;
f(λ) - функция, зависящая от длины волны света λ.
При λ в диапазоне от 0,4 мкм до 0,6 мкм оптическое расстояние L1 будет:

где р, Т - средние значения давления и температуры, измеряемые в атмосфере;
е - влажность воздуха, выраженная через парциальное давление водяного пара, в миллибарах.
При е в диапазоне от 0 до 20 мбар второй член в (2) во много меньше первого, тогда среднее отношение  будет равно:
будет равно: 
Таким образом, при значениях λ1,λ2=0,4-0,6 мкм, погрешности измерения L1,L2=0,1 мм и е<5 мбар, f(λ1) /[f(λ1) - f(λ2)]=20, погрешность измерения D не превысит 1-2 мм.
Если прямая видимость между АП и ПО отсутствует, и измерения ведутся лишь на одной радиочастоте, то погрешность позиционирования составит ~ (10-20) мм.
Дополнительные преимущества ЛДНС можно получить при использовании инфраструктуры мобильной сотовой связи. Это позволит повысить удобство в работе и точность в координировании при решении специальных задач, обеспечит выдачу информации не только на табло, но и на карте местности, плане.
Основная последовательность операций, представленная на Фиг. 2, совпадает с блок-схемой операций прототипа: формирование входных данных инерциальными датчиками (ИД)1, баровысотомером 2, спутниковым приемником (СПР) 3, входную обработку упомянутых данных 4, включающую в себя формирование данных о положении ПО инерциальным способом навигации 5 и выделение данных о положении ПО спутниковым способом 6, а также выходную обработку 7, в которой на основе упомянутых оценок инерциального и спутникового способов выполняют оценивание ошибок ИНС с помощью расширенного фильтра Калмана 8. Далее проводят коррекцию ошибок входной обработки сигналов при формировании оценок положения ПО инерциальным способом навигации и в блоке 9 определяют уточненное положение ПО в виде разности оценок положения ПО, определенных ИНС и упомянутых оценок ошибок ИНС.
Затем между блоками входной 4 и выходной 7 обработок вводят блок 10 промежуточной обработки сигналов ССН, включающей в себя блок 11 формирования данных рабочего созвездия на основе уточненного положения ПО и информации об его ориентации, альманахе данных созвездия и диаграмме направленности антенны приемника, после чего в блоке 12 формируют корреляционную матрицу ошибок.
Новизна предложенного способа состоит в том, что на входы приемников ПО подаются сигналы на радио- и оптической частотах от радиопередатчиков и излучателей, расположенных на ККС и на АП (блоки 13 и 14 на Фиг. 2), запущенной в стратосферу в область спокойной и слабой динамики атмосферного воздуха. Это позволяет более точно (~2-3 мм) определить навигационные параметры (координаты X, Y, Z в местной системе координат, высоту h и вектор скорости V) для всех объектов способа: ККС, АП и ПО.
Далее, как и в прототипе, в блоке 4 производится входная обработка поступающей информации.
В блоке 15 производится выделение данных о положении ПО, его V и h, полученных от АП и ККС. При этом для синхронизации передатчиков и повышения точности позиционирования используются две оптические несущие частоты в диапазоне волн 0,4-0,6 мкм, а также необходимые радиочастоты.
Затем в блоке 6 происходит выделение данных о положении ПО спутниковым способом, с присвоением полученным данным весовых коэффициентов. Полученные таким образом данные о положении ПО с помощью АП и ККС, параллельно с данными о положении ПО, полученными по инерциальному способу в блоке 5, подвергаются выходной обработке 7 с помощью расширенного фильтра Калмана 8, выполняют оценивание и коррекцию ошибок и далее в блоке 9 определяют уточненное положение ПО.
На основании информации об ориентации ПО, диаграммы направленности антенны и альманаха созвездия АП в блоке 11 производят формирование данных рабочего созвездия АП.
Операции промежуточной обработки 10 включают формирование данных рабочего созвездия АП на основании информации об ориентации ПО, диаграммы направленности антенны и альманаха данных рабочих АП. Далее в блоке 12 производится формирование векторов направления выбранных АП и корреляционной матрицы ошибок измерений.
Предложенный способ включает также операцию формирования команд поиска НС или АП в блоке 16. Эта операция использует данные рабочего созвездия НС или АП и создает на управляющем входе приемника команды поиска НС или АП. Таким образом, исключается возможность появления аномальных ошибок в данных АП.
На Фиг. 3 представлена функциональная схема с радио- и оптическим каналами связи станции позиционирования, устанавливаемой на АП и ККС. Каждая станция должна передавать объекту радио- и оптические сигналы, метеопараметры, координаты смещения излучателя. Кроме того, на каждой станции должен присутствовать сфазированный задающий синтезатор, обеспечивающий точную фазовременную привязку к фазе синтезатора на реперной ККС. Эту привязку обеспечивает радиооптический канал синхронизации. Синтезатор с блоком автоподстройки 17 подстраивает фазу сигнала к опорному сигналу от реперной станции (ККС). Для этой цели используют либо радиоканал 18, либо оптический канал от излучателя ККС 19, причем переключение каналов осуществляется при помощи порогового устройства 20, высокочастотного коммутатора 21 и контроллера 22 при достижении оптическим сигналом значений ниже критического уровня. Для компенсации перемещений излучателя 19 используются измерители перемещений (акселерометры) в блоке кодирования 23 и цифровые видеокамеры слежения 24, данные которых поступают для обработки в контроллер 22 (или в спецпроцессор), а формируемый там же сигнал ошибки управляет фазовращателем 25, компенсирующим смещения излучателя 26. Горизонтальные смещения вершины излучателя ККС с применением блока кодирования 23 передаются от радио- и оптического передатчиков 27 к объекту позиционирования. Таким же способом транслируются измеренные в блоке 28 метеопараметры (Т, р, е), однако эта информация необходима лишь в условиях отсутствия оптической видимости. Оптический передатчик 27, как отмечалось, работает через блок модуляции 29 на оптических несущих в районе максимальной дисперсии атмосферы в спектральном диапазоне 0,4-0,6 мкм. Для приема сигналов от опорной ККС используется широкоугольный объектив 19, оптический сигнал которого усиливается фотоусилителем 30 и через пороговое устройство 20 и высокочастотный коммутатор 21, подается на вход синтезатора с системой автоподстройки фазы 17.
Хотя система приема и первичной обработки сигналов позиционирования (см. Фиг. 4) не является оригинальной, все же целесообразно ее привести для пояснения принципа формирования высокоточной входной информации о положении объектов.
Приемник 27 на борту ПО осуществляет прием и декодирование перемещений излучателей АП и ККС по радиоканалу 18 и/или оптическому каналу 19, декодирование значений метеопараметров с каждой передающей станции, а также содержит оптический приемник с фотоусилителем 30, принимающий оптические сигналы в случае прямой видимости. В зависимости от оптического сигнала пороговое устройство 20 и высокочастотный коммутатор 21 пропускают на синтезатор 17 либо сигналы с фотоусилителя 30, либо с радиоприемника 27. Синтезатор 17 подстраивает свою фазу по радиоканалу (в случае плохой видимости) или по сигналу модуляции оптической несущей с ККС. Декодирующее устройство с аналого-цифровым преобразователем (АЦП) 31 осуществляют декодирование смещения излучателей, а также метеопараметров. Контроллер 22 совместно с АЦП измеряет фазы сигналов необходимых частот. Далее контроллер пересчитывает фазы в расстояния с привязкой к координатной сетке и осуществляет расчет координат объекта (ПО), которые выводятся на монитор 32 или табло (для визуализации).
Из приведенных в [11] данных следует, что стабильность опорных генераторов, погрешность позиционирования перемещений излучателей ККС и их временная синхронизация эквивалентны погрешности ~1 мм (если временная синхронизация проводится по оптическому каналу связи), а добавление оптических передатчиков на всех АП и ККС позволяет полностью использовать стабильность инфраструктуры для позиционирования мобильных объектов с погрешностью 1 мм.
Кроме того, повышение точности и надежности навигационного обеспечения ПО достигается при использовании входной информации от НС и АП для формирования в схеме входной обработки 4 и блоке 6 выделенных данных о псевдодальности (ПД), псевдоскорости (ПС) и отношении сигнал/шум (с/ш) в блоке 33. Использование каналов инфраструктуры мобильной сотовой связи 34 также значительно повышает точность и удобство выполнения работ с помощью ПО в сложных и чрезвычайных задачах позиционирования и координации действий с помощью ЛДНС.
Таким образом, выше показана новизна предложенного способа, которая реализуется, прежде всего, в размещении приемо-передающей аппаратуры на промежуточной высоте, между НС и ПО, в зоне спокойной стратосферы, при формировании командных сигналов управления, координирования и коррекции в опорных ККС, расположенных на Земле, связь которых между собой и другими приемо-передатчиками предлагается осуществлять по радиооптическим каналам на двух несущих частотах. Таким образом, создается локальная дифференциальная навигационная система - ЛДНС.
Кроме того, показана целесообразность использования для размещения приемопередатчиков на аэростатной подвеске - АП. Это позволяет значительно экономить средства и время на создание и развертывание такой ЛДНС, что обеспечивает эффективность и удобство ее использования в разных областях.
Использование радио- и оптических каналов на двух несущих частотах позволяет существенно повысить точность, доступность и непрерывность навигационного обеспечения подвижных объектов в сравнении с существующими системами аналогичного назначения.
И, наконец, следует отметить прикладную многофункциональность предложенной ЛДНС - это высокоточное навигационное обеспечение, геодезия и картография, автоматическая посадка ЛА; контроль за передвижением транспорта, при причаливании морского судна в узких местах, при контроле и строительстве сложных сооружений и т.д.
Принципиальными преимуществами системы позиционирования с использованием ЛДНС перед спутниковыми системами, кроме повышенной точности, являются:
- многократно меньшая стоимость изготовления, вывода в зону работы АП, ККС и КИК, а также обслуживания инфраструктуры ЛДНС;
- максимальная скрытность запуска и нахождения в зоне работы;
- максимальная оперативность запуска практически в любом контролируемом районе;
- возможность запуска с летательного аппарата в нужной точке пространства;
- возможность многоразового использования (запуск - посадка);
- возможность работы в автономном режиме (при аварийной ситуации с ГЛОНАСС) обеспечивает резервирование и надежность функционирования системы в "особый" период;
- возможность использования хорошо развитой инфраструктуры мобильной сотовой связи;
- возможность работы "по запросу", которая позволяет скрытно держать ЛДНС в режиме "ожидания" и включать систему только в требуемое время "Ч";
- мобильность, позволяющая отказаться от создания стационарных следящих и ретрансляционных систем.
Создание ЛДНС позволяет решать различные задачи позиционирования материальных объектов (подвижных, в т.ч. летательных аппаратов и стационарных) с наивысшей точностью как в интересах безопасности страны, так и в гражданском секторе.
Источники информации
1. ГЛОНАСС. Принципы построения и функционирования / Под ред. А.И. Петрова, В.Н. Харисова. 4-е изд. перераб. и доп. - М.: Радиотехника, 2005, 800 с.
2. Введение в спутниковую навигацию / В.В. Малышев и др. М. Радиотехника, 2008, - 150 с.
3. Применение GPS/Глонасс (учебное пособие) / М.Р. Богданов, изд."Интеллект", 2012, 136 с.
4. Патент РФ 2334199, кл. G01C 23/00, заявл. 19.03.2007, опубл. 20.09.2008.
5. Патент ЕР 1837627 А2, кл. G01C 21/28, заявл. 07.03.2007, опубл. 26.09.2007.
6. Патент ЕР 202637 А2, кл. G01C 21/16, заявл. 12.08.2008, опубл. 18.02.2009.
7. Патент USA №7,873,472 B2, кл. G01C 21/00, заявл. 11.02.2010, опубл. 18.01.2011.
8. Патент РФ 2536768 С1, кл. G01C 21/00, G01C 23/00, опубл. 27.12.2014.
9. Мобильные приемопередающие устройства для системы позиционирования в задачах контроля наземных объектов / В.И. Григорьевский, М.В. Григорьевская, В.П. Садовников, Ю.О. Яковлев, Измерительная техника, №5, 2013.
10. Рефракция электромагнитных волн в атмосферах Земли, Венеры и Марса. М.: Советское радио, 1976.
11. Оценка точности позиционирования объектов с помощью инфраструктуры мобильной связи / В.И. Григорьевский, М.В. Григорьевская, Ю.О. Яковлев / Метрология 2011, №8, с. 33-42.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ТОПОПРИВЯЗЧИКА В РЕЖИМЕ КОНТРОЛЬНО-КОРРЕКТИРУЮЩЕЙ СТАНЦИИ | 2012 |
|
RU2498223C1 |
| Способ формирования самоорганизующейся структуры навигационного комплекса | 2016 |
|
RU2635825C1 |
| СПОСОБ ДИФФЕРЕНЦИАЛЬНОЙ НАВИГАЦИИ | 1999 |
|
RU2155969C1 |
| СПОСОБ ГРУППОВОЙ НАВИГАЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1997 |
|
RU2130622C1 |
| СИСТЕМА ОЦЕНКИ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314553C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА ЗАХОДА НА ПОСАДКУ И ПОСАДКИ | 2002 |
|
RU2236020C2 |
Изобретение относится к области авиационно-космического приборостроения и может найти применение в системах определения координат подвижных объектов (ПО) с использованием комплексного способа навигации, функционально объединяющего инерциальный способ и спутниковый, и может быть использовано при высокоточном позиционировании ПО, а также при осуществлении полета летательного аппарата (ЛА) в сложных навигационных условиях. Технический результат - повышение точности. Для этого между орбитами спутников и ПО размещают аэростатную подвеску (АП) с аппаратурой, осуществляющей поиск, захват и автоматическое сопровождение созвездия видимых спутников и ПО по команде с контрольно-корректирующей станции (ККС) и ПО. Приемопередатчики АП передают навигационную информацию в наземную станцию сопровождения (ККС) и потребителю (ПО). Кроме того, на АП размещают оптическую аппаратуру для наблюдения и слежения за звездами с целью коррекции инерциальной навигационной системы (ИНС) и местной декартовой системы координат. Предполагается запуск в стратосферу нескольких (4-5) АП, радио- и оптически связанных между собой и с ККС, которая геодезически точно привязывается к принятой местной системе координат. Таким образом, формируется локальная дифференциальная навигационная система (ЛДНС) с зоной обзора радиусом 50-200 км. Зная достаточно точное положение опорной ККС и используя радио- и оптические сигналы дальности, а также сигналы доплеровского сдвига частоты, можно с высокой точностью определять как координаты, так и векторы скорости АП и ПО, увеличивая зону и время доступности ПО. 12 з.п. ф-лы, 4 ил.
1. Способ инерциально-спутникового позиционирования подвижных объектов (ПО), включая и летательные аппараты (ЛА), состоящий в том, что производится совместная обработка входных данных о положении ПО, формируемых независимо инерциальными датчиками, вырабатывающими векторы угловой скорости и ускорения ПО, барометрическим высотомером и спутниковым приемником глобальной навигационной спутниковой системы с известным альманахом навигационных спутников (НС) и составом рабочего созвездия, с учетом информации о положении и ориентации подвижных объектов, отличающийся тем, что между орбитами НС и ПО, на высоте 35-60 км от поверхности Земли, размещают аэростатную подвеску (АП), радио- и оптически связанную с контрольно-корректирующей станцией (ККС), являющейся геодезически точно привязанной к принятой системе координат базовой станцией и формирующей локальную дифференциальную навигационную систему (ЛДНС) с зоной обзора радиусом ~(50-200) км, и использующей радио-оптические каналы синхронизации генераторов, работающих на двух близких частотах F1, F2, а также в области длин волн света ~(0,4-0,6) мкм, и осуществляющих временную (фазовую) синхронизацию разнесенных синтезаторов передатчиков АП, а также передающих информацию ПО о метеопараметрах и своих координатах перемещения.
2. Способ по п. 1, отличающийся тем, что приемо-передающая аппаратура АП, работающая в запросном режиме, формирует и передает навигационную и др. (метеопараметры) информацию по закодированным командам с ПО и ККС, осуществляя поиск, захват и автоматическое сопровождение рабочего созвездия НС, а также прием и передачу навигационной информации в наземную станцию сопровождения (ККС) и на ПО.
3. Способ по п. 1, отличающийся тем, что для повышения точности, надежности и диапазона доступности ПО, формируют ЛДНС навигационных АП (рабочее "созвездие" из 4-5 АП), разнесенных на расстояния оптической "видимости" ~(50-120) км вокруг рабочей зоны потребителей навигационной информации, работающих на одной общей частоте, обеспечивающей прямую оптическую и радиовзаимосвязь между собой и ККС в момент работы.
4. Способ по п. 1, отличающийся тем, что для расширения диапазона автономной работы АП в сложных условиях, на борту АП используют малогабаритную достаточно точную систему инерциальной навигации (ИНС) со стабилизированной платформой и корректируемую по звездам и от наземных станций сопровождения (ККС).
5. Способ по любому из пп. 1, 4, отличающийся тем, что на борту АП устанавливают стабилизируемую в инерциальном пространстве оптическую аппаратуру для наблюдения за звездным небом, а также за созвездием спутников навигационной системы ГЛОНАСС.
6. Способ по п. 5, отличающийся тем, что на борту АП формируют инерциальную систему координат, которую преобразуют в местную декартовую систему координат x, y, z, корректируемую по звездам.
7. Способ навигации по п. 1, отличающийся тем, что для работы АП с рабочим созвездием НС используют систему антенн, расположенных в верхней части АП и обслуживающих верхнюю полусферу атмосферы, а для наблюдений и работы с наземными объектами - антенны, расположенные в нижней части АП и направленные вниз.
8. Способ навигации по п. 6, отличающийся тем, что для решения задач геодезии и картографии и спец. задач на борту АП используют высокоточный абсолютный стабилизированный в системе координат x, y, z гравиметр.
9. Способ по п. 8, отличающийся тем, что используют специальную оптическую аппаратуру для наблюдения за поверхностью и фотографирования объектов по команде с опорного пункта наблюдения (ККС).
10. Способ по п. 9, отличающийся тем, что на борту АП осуществляют наблюдения за атмосферой (и ионосферой) и прогнозируют ухудшения видимости и радиосвязи, а также погодные изменения.
11. Способ по п. 1 или 10, отличающийся тем, что для обеспечения высокоточного позиционирования ПО при выполнении специальных работ используют инфраструктуру мобильной сотовой связи.
12. Способ по п. 1, отличающийся тем, что для экономической целесообразности, при выходе АП из рабочей зоны, по команде с ККС, осуществляют мягкую посадку АП с последующей проверкой работоспособности аппаратуры АП, обновлением программы и ячеек памяти АП, после чего производят повторный запуск АП в новой рабочей зоне.
13. Способ по любому из пп. 1-4, отличающийся тем, что для создания АП используют материалы и покрытия, маскирующие АП от наблюдения ее в стратосфере.
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| Авиационное вооружение и авионика | |||
| Энциклопедия XXI века | |||
| Оружие и технологии России | |||
| - М.: Оружие и технологии | |||
| Том X, 1999 | |||
| Способ приготовления искусственной массы из продуктов конденсации фенолов с альдегидами | 1920 |
|
SU360A1 |
| УСТРОЙСТВО ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2546665C2 |
| СПОСОБ ТОЧНОГО ПОЗИЦИОНИРОВАНИЯ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2008 |
|
RU2365932C1 |
| US 7873472 В2, 18.01.2011. | |||

