Изобретение относится к области диагностики технического состояния электропривода по оценке динамики его параметров и может применяться для диагностики без вывода из работы электроприводов различного типа, эксплуатирующихся в сложных условиях, где затруднен или невозможен постоянный доступ персонала, а также приводов ответственных механизмов, где требуется выявлять аварийные ситуации на ранних стадиях, не повлекших серьезных разрушений.
Известен способ диагностики технического состояния электродвигателя по его электрическим параметрам, описанный в RU 2425391 C1, G01R 31/34, СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПО ЕГО ЭЛЕКТРИЧЕСКИМ ПАРАМЕТРАМ, при котором в трех фазах электродвигателя производят измерение питающего напряжения и фазного тока, а по их сигналам мгновенных значений вычисляют мгновенные значения потребляемых мощностей. Оценку технического состояния двигателя осуществляют по спектрограммам потерь, сравнивая их со спектрограммами потерь, полученных на заведомо исправном двигателе.
Недостатком этого способа является то, что он позволяет оценивать состояние только самого электродвигателя, без учета искажений, которые могут быть внесены в работу электродвигателя приводным механизмом и питающим преобразователем, что ограничивает виды диагностируемых неисправностей.
Известен способ определения технического состояния электродвигателя переменного тока и устройство для его осуществления, описанный в RU 2389121 C1, H02K 15/00, G01R 31/34, СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, который заключается в получении с датчика в силовой цепи электродвигателя сигнала, его выпрямления и интегрировании в течение установленного времени и измерении. После этого интегрированный сигнал сравнивается с сигналами, полученными аналогично и соответствующими электродвигателю без наработки и с предельной наработкой. По разнице сигналов определяется текущее техническое состояние электродвигателя переменного тока и производится автоматический прогноз остаточного ресурса.
Недостатком этого способа является то, что он рассчитан на применение только к электродвигателю переменного тока, также не учитывается влияние искажений от приводного механизма и питающего преобразователя на работу электродвигателя. Кроме того, оценка производится только по одному параметру, который не может описать всей динамики объекта, и виды диагностируемых неисправностей ограничены.
Известен способ диагностики механизмов и систем с электрическим приводом (RU 2431152 C2, G01R 31/34, СПОСОБ ДИАГНОСТИКИ МЕХАНИЗМОВ И СИСТЕМ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ), взятый за прототип, при котором в течение заданного интервала времени производится запись значений фазных токов и напряжений электродвигателя, после чего производится их разложение на гармонические составляющие с измерением амплитуды и фазы гармонических составляющих, поступающих из сети. После чего производится идентификация технического состояния и прогнозирование ресурса безаварийной работы диагностируемого объекта с помощью искусственной нейронной сети.
Недостатком этого способа является то, что не используется информация о скорости и управляющем задании, что не позволяет произвести полноценную идентификацию объекта без предварительных ресурсоемких расчетов гармонических составляющих. Приходится предварительно рассчитывать гармонические составляющие, а нейронная сеть по их составу классифицирует неисправность.
Технической задачей данного изобретения является создание более эффективного и универсального способа диагностики электроприводов, позволяющего производить оценку технического состояния электропривода в работе на ранней стадии развития дефектов, предупреждая внезапные остановы и снижая затраты на ремонт.
Технический результат состоит в повышении точности и надежности диагностирования с уменьшением вычислительных затрат на оценку состояния электропривода, за счет применения рекуррентной нейронной сети в качестве основного инструмента анализа состояния электропривода.
Технический результат достигается тем, что перед эксплуатацией конкретного электропривода, предварительно производится построение его динамической нейросетевой модели, использование которой в дальнейшем позволяет произвести анализ состояния электропривода в работе и удаленно.
Сущность изобретения заключается в том, что с определенным интервалом времени производится замер тока, напряжения, скорости и управляющего задания электропривода, преобразование параметров в цифровую форму и передача в персональный компьютер для обработки. Программно реализованная и обученная на конкретном электроприводе перед его эксплуатацией рекуррентная нейронная сеть воспроизводит динамику параметров электропривода, после чего производится сравнение результата динамики нейросетевой модели с реальной динамикой электропривода. В неисправном электроприводе возникает отклонение динамики El(t) его параметров от модели M(t) и рассчитывается функция рассогласования динамики во времени Err(t).

По характеру динамики Err(t) производится оценка технического состояния и прогноз ресурса электропривода.
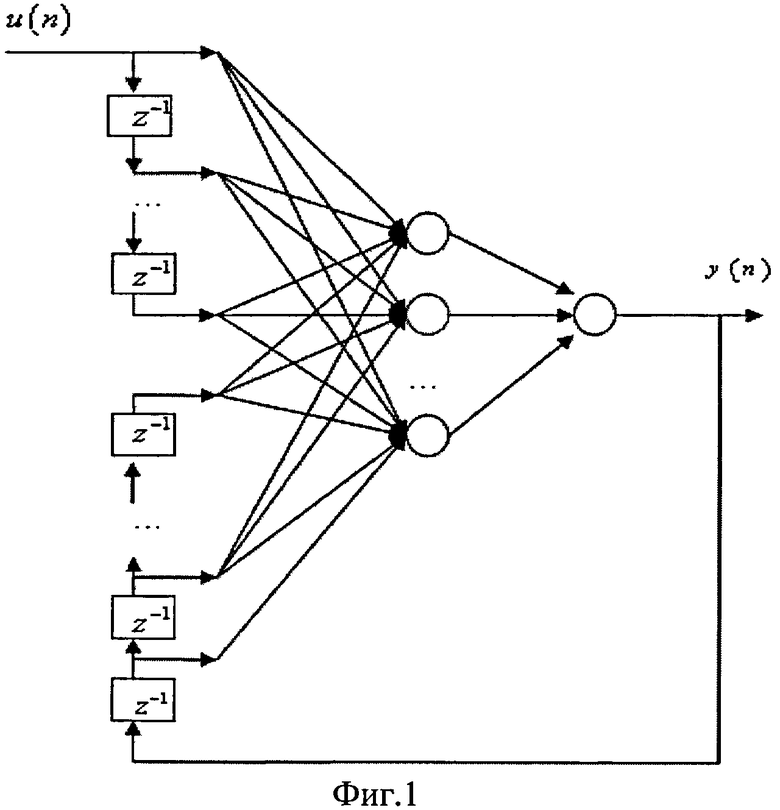
При рассмотрении электропривода как динамического объекта, описываемого вектором входных данных, вектором внутреннего состояния и вектором выходных данных можно получить его модель, применив для идентификации рекуррентную искусственную нейронную. Нейронная сеть, имея достаточное количество обучающих примеров, может быть обучена для воспроизведения динамики объекта согласно теореме об универсальной аппроксимации. Ключевым условием является наличие обратных связей, что позволяет запоминать последовательности сигналов.
Структура нейросетевой модели представлена на Фиг.1.
Обобщенная модель имеет следующее форму:

где 

В настоящее время не существует точного способа определения необходимого числа нейронов, достаточного для оптимальной идентификации объекта по критериям точности отображения и экономии вычислительных ресурсов. Экспериментальным путем было установлено оптимальное применение двухслойной сети с 12 нейронами во внутреннем слое для идентификации электропривода.
Для сбора информации и осуществления диагностики применяется технический комплекс (Фиг.2) включающий: датчик скорости (ДС), датчик тока (ДТ), датчик напряжения (ДН), измерительно-вычислительный комплекс (ИВК) и персональный компьютер (ПК).
На первом этапе производится идентификация электропривода. Для получения полной информации электропривод запускается во всех режимах работы, в которых в последующем будет эксплуатироваться. При этом производится запись в память ИВК в работе параметров тока с ДТ, напряжения с ДН, скорости с ДС и управляющего задания электропривода, которое формируется самим ИВК.
После съема данных ИВК приводит их к цифровому виду и производит фильтрацию сигналов скорости W, тока I и напряжения U для устранения шумов методом сглаживания по нескольким точкам.



где k - число точек, которые участвуют в сглаживании сигналов.
После подготовки данных ИВК передает их в ПК для построения модели. Специальное программное обеспечение осуществляет построение нейросетевой модели (Фиг.1) для идентификации и обучает модель на полученном от ИВК множестве данных. Часть данных резервируется для проверки обученной модели на адекватность отображения динамики.
После завершения стадии обучения модели система диагностики может производить вычисления в фоновом режиме, оценивая степень совпадения вектора динамики параметров модели с динамикой параметров электропривода. При этом постоянно вычисляется значение расхождения динамики Err(t), формируя функцию во времени за период t, также ведется расчет интегральной оценки расхождения динамики IErr и скорости изменения расхождения 


Так как нейросетевая модель имеет некоторую погрешность, то на стадии начальной идентификации вводятся допуски функции ΔErr(t) и ее интегральной оценки ΔIErr, которые принимается за нормальное состояние.
После вычисления Err(t), IErr и 
Таким образом, предлагаемая система работает в двух режимах: режиме обучения модели и режиме диагностики. В режиме обучения требуется некоторое время, пока производится съем данных и подготовка формирования обученной нейронной сети, это может занимать порядка 10 минут из-за того что обучение сети ресурсоемко в плане процессорного времени. После обучения система работает в режиме диагностики и расчет текущего состояния динамики и ее оценка занимает мало ресурсов процессора, поэтому способ может быть реализован как на ПК, так целиком и на базе измерительно-вычислительного комплекса ИВК, независимого от ПК или на базе программного обеспечения промышленных контроллеров общего назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОТРЕБИТЕЛЯ-РЕГУЛЯТОРА НА ОСНОВЕ НЕЙРОСЕТЕВОГО ДИАГНОСТИРОВАНИЯ | 2019 |
|
RU2719507C1 |
| Способ определения технического состояния электрических и гидравлических приводов | 2022 |
|
RU2799489C1 |
| Способ диагностики асинхронного электродвигателя на основе нейросетевого анализа | 2024 |
|
RU2831697C1 |
| СПОСОБ ДИАГНОСТИКИ МЕХАНИЗМОВ И СИСТЕМ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2009 |
|
RU2431152C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ И ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ЭЛЕКТРОМЕХАНИЧЕСКОГО АГРЕГАТА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2626231C1 |
| СПОСОБ ОПЕРАТИВНОЙ ДИАГНОСТИКИ МОДУЛЕЙ МЕТАЛЛООБРАБАТЫВАЮЩИХ СТАНКОВ | 2018 |
|
RU2727470C2 |
| СПОСОБ ОПЕРАТИВНОГО КОНТРОЛЯ ПАРАМЕТРОВ И ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ УЗЛОВ МАЛОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) | 2022 |
|
RU2803903C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЫЯВЛЕНИЯ И ПРОГНОЗИРОВАНИЯ ОСЛОЖНЕНИЙ В ПРОЦЕССЕ СТРОИТЕЛЬСТВА НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2020 |
|
RU2745136C1 |
| СПОСОБ ДИАГНОСТИКИ И ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ЭЛЕКТРОПРИВОДОВ ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2532762C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕЖИМАМИ НА ОСНОВЕ НЕЙРОСЕТЕВОГО ДИАГНОСТИРОВАНИЯ НЕИСПРАВНОСТЕЙ И ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОГО ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА | 2017 |
|
RU2648413C1 |
Изобретение относится к области диагностики технического состояния электрических приводов, например электроприводов прокатных станов в металлургическом производстве, на основе анализа параметров тока, напряжения, скорости и управляющего задания с применением рекуррентной искусственной нейронной сети. Технический результат: повышение точности и достоверности диагностирования аварийных состояний электропривода на работающем оборудовании в ранней и ненаблюдаемой стадии их возникновения, что предупреждает внезапную аварийную остановку электропривода и позволяет существенно снизить расходы на ремонт. Сущность изобретения: с определенным интервалом времени производится замер тока, напряжения, скорости и управляющего задания электропривода, преобразование параметров в цифровую форму и передача в персональный компьютер для обработки. Программно реализованная и обученная на конкретном электроприводе перед его эксплуатацией рекуррентная нейронная сеть воспроизводит динамику параметров электропривода, после чего производится сравнение результата динамики нейросетевой модели с реальной динамикой электропривода. В неисправном электроприводе возникает отклонение динамики его параметров от модели и рассчитывается функция рассогласования динамики. По характеру функции рассогласования динамики производится оценка технического состояния и прогноз ресурса электропривода. 2 ил.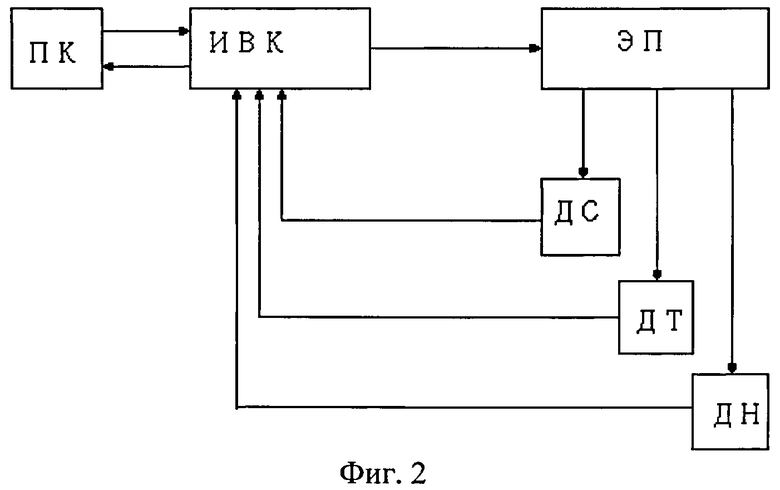
Способ диагностики технического состояния электропривода по оценке динамики его параметров, включающий замер и запись микропроцессорным устройством в течение заданного промежутка времени с заданной периодичностью токов и напряжений электродвигателя, преобразование аналоговых величин тока и напряжения в цифровую форму, передачу цифровых данных тока и напряжения в персональный компьютер для дальнейшей обработки специализированным программным обеспечением, применяющий искусственную нейронную сеть для идентификации технического состояния и прогнозирования ресурса безаварийной работы электропривода, отличающийся тем, что одновременно ведется замер и запись микропроцессорным устройством в течение заданного промежутка времени с заданной периодичностью скорости двигателя и управляющего задания, преобразование аналоговых величин скорости и управляющего задания в цифровую форму, передачу цифровых данных скорости и управляющего задания в персональный компьютер для дальнейшей обработки специализированным программным обеспечением, при этом применяется рекуррентная нейронная сеть для идентификации электропривода непосредственно по полученным параметрам, без предварительного анализа параметров другими методами, после идентификации нейронная сеть представляет собой динамическую нейросетевую модель электропривода, при этом нейросетевая модель повторяет динамику электропривода в нормальном режиме работы электропривода, при изменении технического состояния электропривода возникает рассогласование динамики нейросетевой модели и электропривода, рассчитывается функция рассогласования динамики, при этом по величине, скорости и ускорении нарастания функции рассогласования динамики, на основании эмпирических данных для разного характера неисправностей, выдается заключение о техническом состоянии электропривода, характере неисправности и прогноз его ресурса.
| СПОСОБ ДИАГНОСТИКИ МЕХАНИЗМОВ И СИСТЕМ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2009 |
|
RU2431152C2 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2495444C1 |
| US 7539549 B1 26.05.2009 | |||
| US 20090091289 A1 09.04.2009 | |||
| Узел крепления зашивки судовыхпОМЕщЕНий | 1979 |
|
SU816860A1 |
| US 20030065634 A1 03.04.2003 | |||

