Изобретение относится к электрическим машинам и средствам диагностики может быть использовано для контроля состояния асинхронного электродвигателя.
Известен способ диагностики механизмов и систем с электрическим приводом [Заявка RU 2009143292, МПК G01R 31/00 (2006.01), опубл. 27.05.2011], выбранный в качестве прототипа, включающий запись значений фазных токов и напряжений электродвигателя в течение заданного интервала времени и с заданной периодичностью, разложение их на гармонические составляющие с помощью быстрого преобразования Фурье и измерение амплитуды и фазы гармонических составляющих, фильтрацию гармонических составляющих, преобразование полученного сигнала из аналоговой в цифровую форму, идентификацию технического состояния и прогнозирование ресурса безаварийной работы диагностируемого объекта по совокупности параметров гармонических составляющих фазных токов и напряжений, генерируемых электродвигателем и динамики их изменения. Используют искусственную нейронную сеть, которая идентифицирует техническое состояние объекта с применением коэффициентов искажения кривой тока и кривой напряжения для каждого интервала времени с выдачей результата - кода возможного дефекта, анализирует и прогнозирует техническое состояние объекта с применением интегрального параметра поврежденности за весь исследуемый период времени и выдает результат возможного значения параметра поврежденности будущего измерения через тот же интервал времени.
Недостатком данного способа является использование дополнительных средств измерения электрических значений, и использование преобразование Фурье, которое имеет малое количество базисных функций и пригодно только для анализа статических режимов работы асинхронного электродвигателя, что уменьшает его область применения.
Задачей изобретения является расширение арсенала средств аналогичного назначения.
Поставленная задача решена за счет того, что в способе диагностики состояния асинхронного электродвигателя, так же как в прототипе, регистрируют значения фазных токов асинхронного электродвигателя в течение заданного интервала времени и с заданной периодичностью.
Согласно изобретению предварительно фиксируют пороговое значение интегральной оценки асинхронного электродвигателя в безаварийном состоянии. Для этого используя значения фазных статорных токов асинхронного электродвигателя в установившемся режиме работы, определяют результирующий модуль вектора тока. Его раскладывают на высокочастотные и низкочастотные вейвлет-коэффициенты. Используя высокочастотные вейвлет-коэффициенты определяют интегральную оценку, на основе которой формируют допустимую зону работы в виде порогового значения. После этого снова регистрируют мгновенные значения фазных статорных токов асинхронного электродвигателя в установившемся режиме работы и определяют результирующий модуль вектора тока. Его раскладывают на высокочастотные и низкочастотные вейвлет-коэффициенты. Используя высокочастотные вейвлет-коэффициенты определяют интегральную оценку. По отклонению интегральной оценки от допустимой зоны работы асинхронного электродвигателя судят о состоянии электродвигателя. Если полученная интегральная оценка не входит в допустимую зону порогового значения, то делают вывод о неисправности асинхронного электродвигателя.
Данный способ позволяет в режиме реального времени проводить диагностику асинхронных электродвигателей по статорным токам без использования дополнительных средств измерения и с индивидуальной адаптацией для каждого электропривода. Вейвлет преобразование дает возможность анализировать как стационарный, так и нестационарный сигнал.
На фиг.1 приведена схема устройства, реализующего способ диагностики состояния асинхронного электродвигателя.
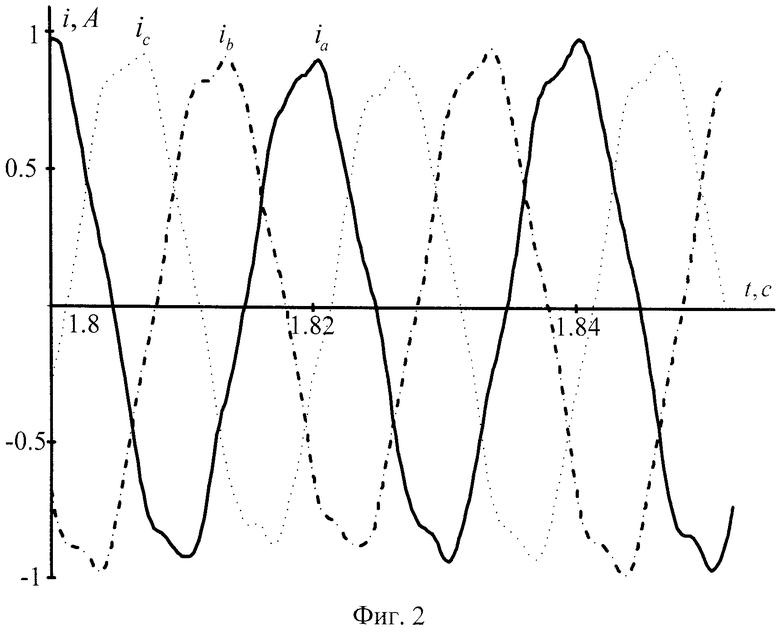
На фиг.2 приведены осциллограммы статорных фазных токов для безаварийного установившегося режима работы асинхронного электродвигателя.
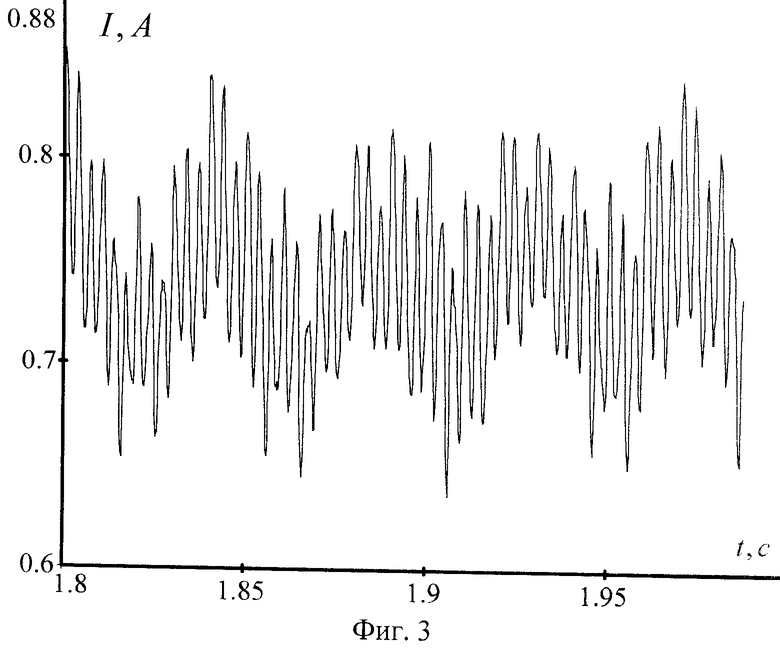
На фиг.3 приведена осциллограмма результирующего модуля тока, определенного для безаварийного установившегося режима работы асинхронного электродвигателя.
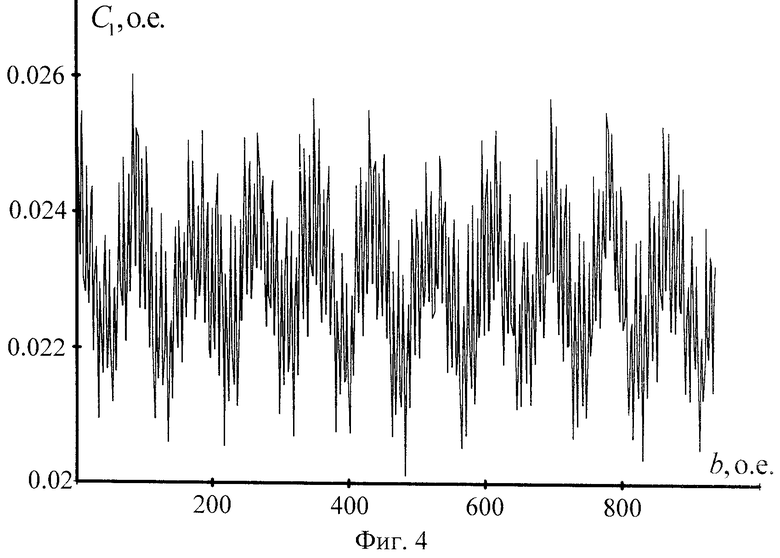
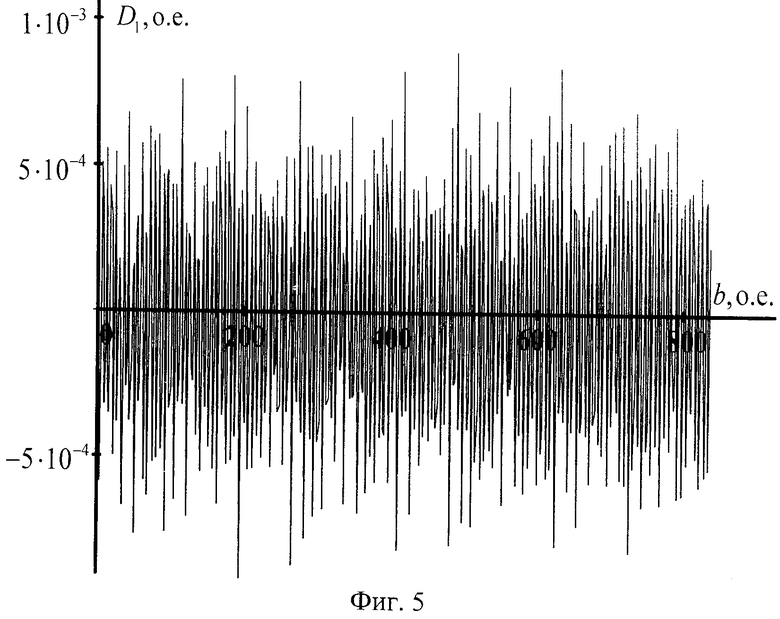
На фиг.4 приведены высокочастотные вейвлет-коэффициенты C1, а на фиг.5 приведены низкочастотные вейвлет-коэффициенты D1 в виде зависимостей от дискретного времени b, определенные для безаварийного установившегося режима работы электродвигателя.
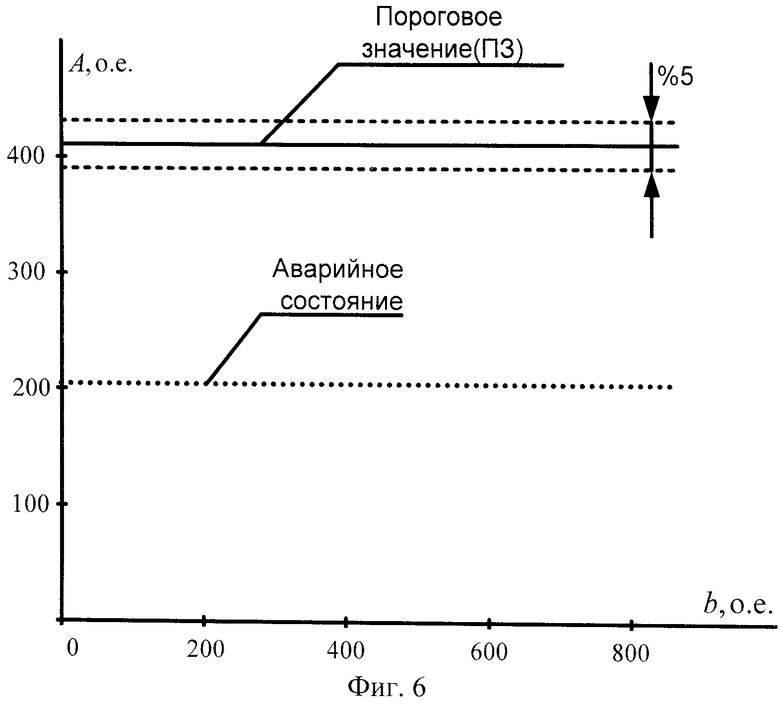
На фиг.6 приведена допустимая зона работы асинхронного электродвигателя в виде зависимости интегральной оценки А от дискретного времени b, где значение интегральной оценки электродвигателя находится в аварийном и безаварийном режиме.
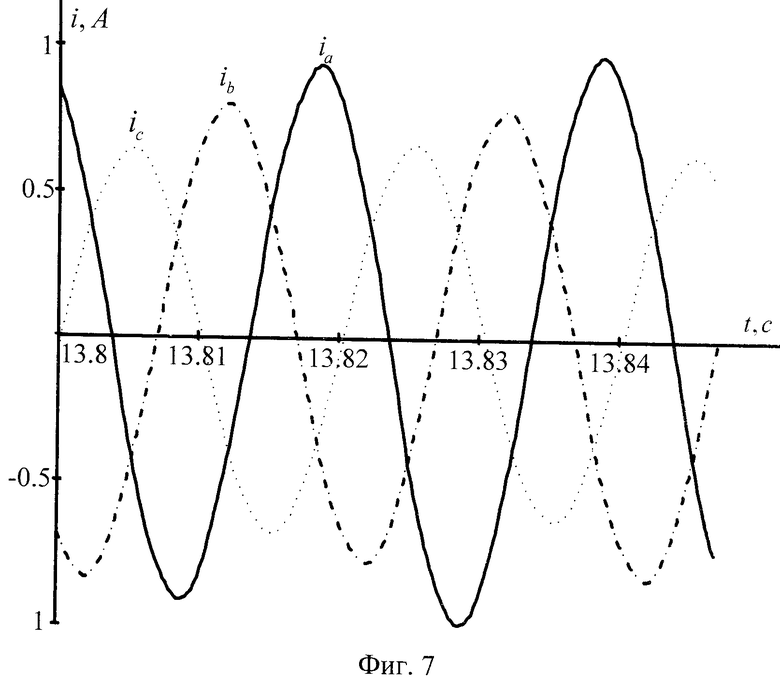
На фиг.7 приведены осциллограммы статорных фазных токов для аварийного установившегося режима работы электродвигателя.
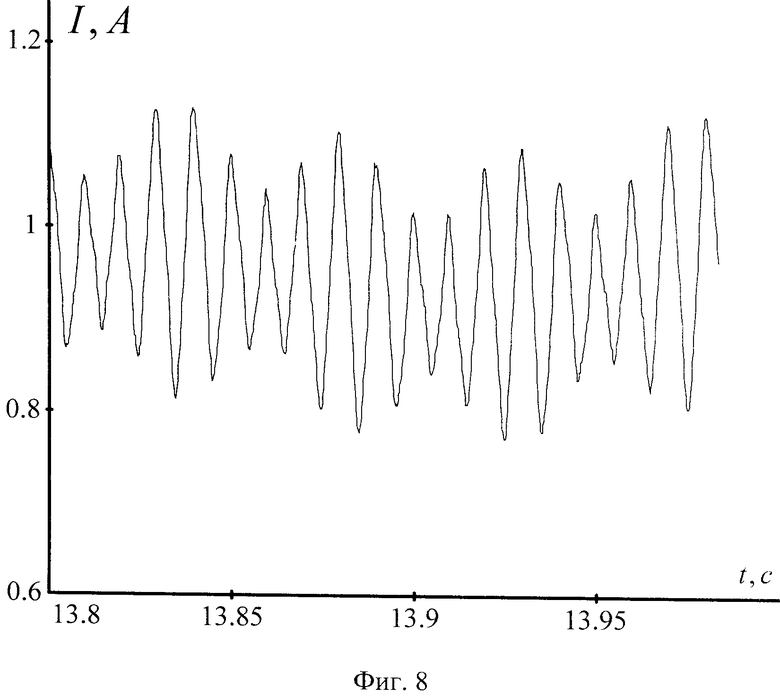
На фиг.8 приведена осциллограмма результирующего модуля тока, определенного для аварийного установившегося режима работы электродвигателя.
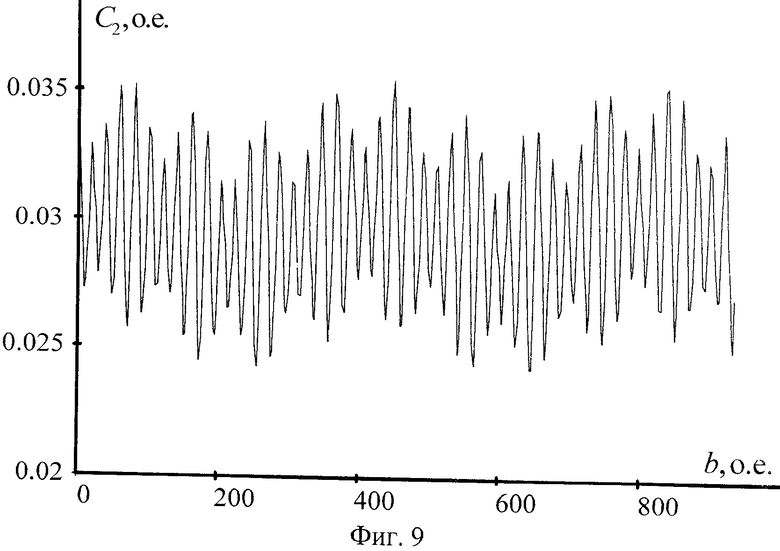
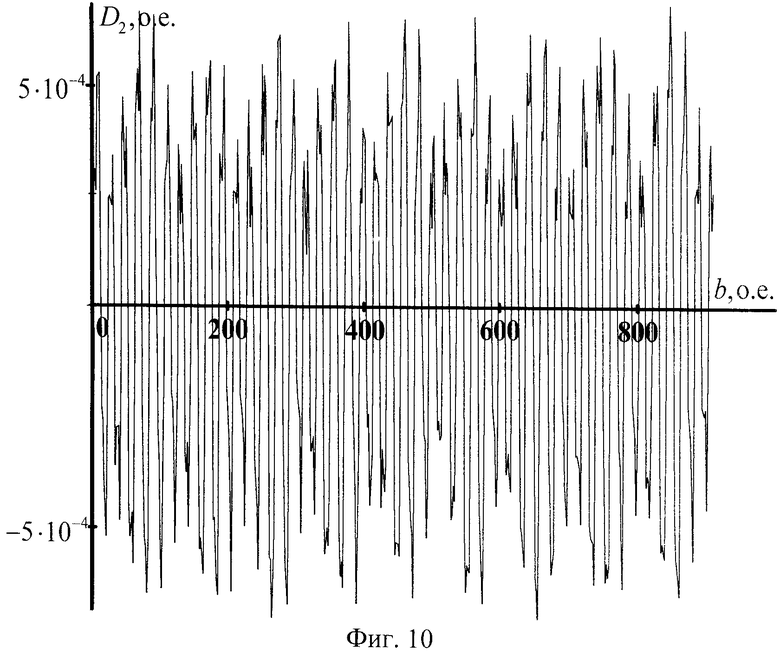
На фиг.9 приведены высокочастотные вейвлет-коэффициенты С2, а на фиг.10 приведены низкочастотные вейвлет-коэффициенты D2 в виде зависимостей от дискретного времени b, определенные для аварийного установившегося режима работы электродвигателя
Способ диагностики состояния асинхронного электродвигателя осуществлен с помощью устройства (фиг.1), содержащего датчики статорных фазных токов 1 (ДТ1), 2 (ДТ2), 3 (ДТ3), подключенных к фазам питания асинхронного двигателя. Выходы этих датчиков тока подключены к блоку вычисления результирующего модуля тока 4 (БРМТ), к которому последовательно подключены блок вейвлет преобразования 5 (БВП), блок интегральной оценки 6 (БИО) и блок сравнения 7 (БС), который связан с дисплеем или ЭВМ (не показаны на фиг.1). Блок порогового значения 8 (БПЗ) соединен с блоком сравнения 7 (БС).
В качестве датчиков статорных фазных токов 1 (ДТ1), 2 (ДТ2), 3 (ДТ3) может быть использован промышленный прибор КЭИ-0,1. Блок вычисления результирующего модуля тока 4 (БРМТ), блок вейвлет преобразования 5 (БВП), блок интегральной оценки 6 (БИО), блок сравнения 7 (БС), блок порогового значения 8 (БПЗ) могут быть реализованы с помощью микроконтроллера группы AVR с необходимым набором интерфейсов.
Предварительно определяют допустимую зону работы асинхронного электродвигателя, которая соответствует безаварийному режиму работы двигателя, для этого вначале регистрируют мгновенные значений фазных статорных токов с датчиков 1 (ДТ1), 2 (ДТ2), 3 (ДТ3) в безаварийном режиме асинхронного двигателя, подключенные к асинхронному двигателю с фазным ротором (2р=4, nc=1500 об/мин). Регистрационные записи мгновенных значений фазных статорных токов с каждой фазы производят в установившемся режиме работы асинхронного двигателя в течение 1 с. (фиг.2). Затем на основе, полученной информации о токах в блоке вычисления результирующего модуля тока 4 (БРМТ) определяют результирующий модуль тока, который представлен на фиг.3. Результирующий модуль тока в блоке вейвлет преобразования 5 (БВТ) раскладывают на высокочастотные (фиг.4) и низкочастотные (фиг.5) вейвлет-коэффициенты. Далее высокочастотные вейвлет-коэффициенты проходят интегральную оценку [Бесекерский В.А., Попов Е.П. «Теория систем автоматического управления». Профессия, 2003 г. - 752 с] в блоке интегральной оценки 6 (БИО), которая численно равна 410 о.е.. На основе ее формируют допустимую зону работы в виде порогового значения 8 (ПЗ) (фиг.6). Ширину допустимой зоны работы асинхронного электродвигателя задает эксперт. В данном случае выбрана 5% допустимая зона работы асинхронного электродвигателя, которая соответствует диапазону 431.415…390.297.
Затем регистрируют мгновенные значения статорных токов с датчиков 1 (ДТ1), 2 (ДТ2), 3 (ДТ3) (фиг.7). Регистрационные записи мгновенных значений фазных статорных токов с каждой фазы производят в установившемся режиме работы асинхронного двигателя в течение 1 с.
С помощью блока вычисления результирующего модуля тока 4 (БРМТ) определяют результирующий модуль тока (фиг.8), который раскладывают на высокочастотные (фиг.9) и низкочастотные (фиг.10) вейвлет-коэффициенты в блоке вейвлет преобразования 5 (БВП). Используя высокочастотные вейвлет-коэффициенты определяют интегральную оценку в блоке интегральной оценки 6 (БИО). В блоке сравнения 7 (БС) сравнивают текущее значение (203, 498) с допустимой зоной (431.415..390.297) (фиг.6), которая ранее была определена. Так как данная интегральная оценка не входит в допустимую зону (431.415..390.297), то в блоке сравнения 7 (БС) фиксируют это, и выходной сигнал с него поступает на ЭВМ, который информирует о наличии неисправности в асинхронном электродвигателе. При выходе значений интегральной оценки из допустимой 5% зоны (фиг.6) фиксируют аварийное состояние асинхронного электродвигателя. Таким образом, происходит успешная диагностика состояния асинхронного электродвигателя в режиме реального времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ СОСТОЯНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2021 |
|
RU2763849C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБОБЩЁННОГО ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2641318C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2009 |
|
RU2410813C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ВРАЩАТЕЛЬНОГО ИЛИ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2011 |
|
RU2460190C1 |
| СПОСОБ ДИАГНОСТИКИ МЕХАНИЗМОВ И СИСТЕМ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2009 |
|
RU2431152C2 |
| УСТРОЙСТВО ДИАГНОСТИРОВАНИЯ В РЕАЛЬНОМ ВРЕМЕНИ СИСТЕМЫ ЭЛЕКТРОДВИЖЕНИЯ СУДНА | 2010 |
|
RU2451299C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ И ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ЭЛЕКТРОМЕХАНИЧЕСКОГО АГРЕГАТА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2626231C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2576330C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2822608C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2326480C1 |
Изобретение относится к средствам диагностики электрических машин и может быть использовано для контроля состояния асинхронного электродвигателя. Способ диагностики состояния асинхронного электродвигателя включает предварительную фиксацию порогового значения интегральной оценки асинхронного электродвигателя в безаварийном состоянии. Для этого, используя мгновенные значения фазных статорных токов асинхронного электродвигателя в установившемся режиме работы в течение заданного интервала времени и с заданной периодичностью, определяют результирующий модуль вектора тока. Его раскладывают на высокочастотные и низкочастотные вейвлет-коэффициенты. Используя высокочастотные вейвлет-коэффициенты определяют интегральную оценку, на основе которой формируют допустимую зону работы в виде порогового значения. После этого снова регистрируют мгновенные значения фазных статорных токов асинхронного электродвигателя в установившемся режиме работы, определяют результирующий модуль тока. Его раскладывают на высокочастотные и низкочастотные вейвлет-коэффициенты. Используя высокочастотные вейвлет-коэффициенты определяют интегральную оценку. По отклонению интегральной оценки от допустимой зоны работы асинхронного двигателя судят о состоянии асинхронного электродвигателя. Если полученная интегральная оценка не входит в допустимую зону порогового значения, то делают вывод о неисправности асинхронного электродвигателя. Технический результат заключается в упрощении способа диагностики электрических машин. 10 ил.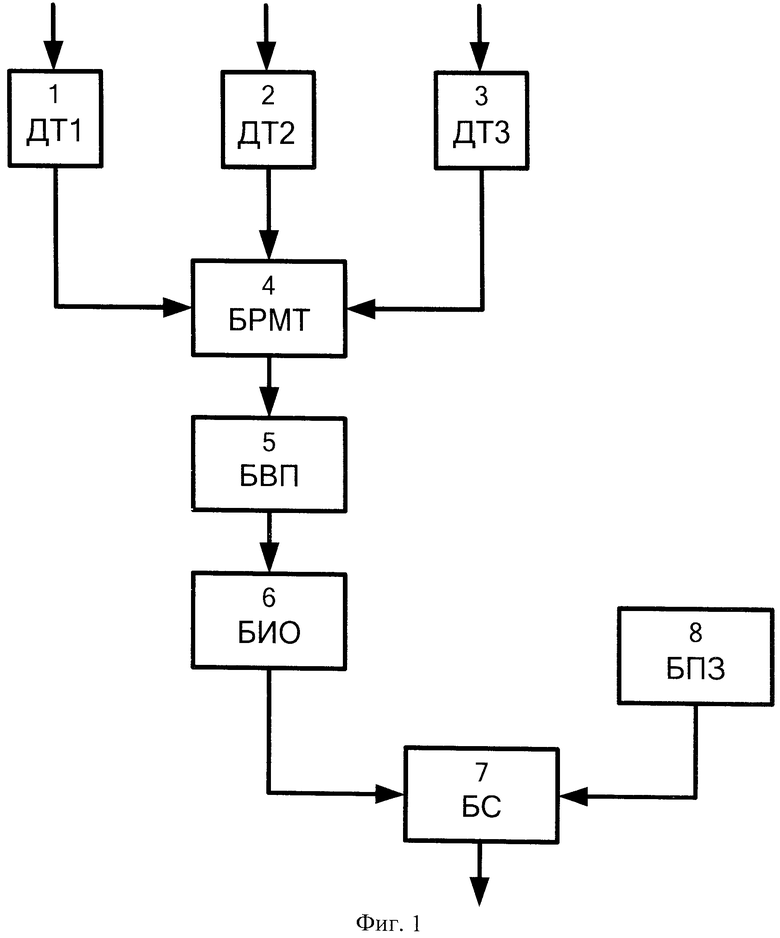
Способ диагностики состояния асинхронного электродвигателя, включающий регистрацию значений фазных токов асинхронного электродвигателя в течение заданного интервала времени и с заданной периодичностью, отличающийся тем, что предварительно фиксируют пороговое значение интегральной оценки асинхронного электродвигателя в безаварийном состоянии, для этого, используя мгновенные значения фазных статорных токов асинхронного электродвигателя в установившемся режиме работы, определяют результирующий модуль вектора тока, который раскладывают на высокочастотные и низкочастотные вейвлет-коэффициенты, используя высокочастотные вейвлет-коэффициенты, определяют интегральную оценку, на основе которой формируют допустимую зону работы электродвигателя в виде порогового значения, после этого снова регистрируют мгновенные значения фазных статорных токов асинхронного электродвигателя в установившемся режиме работы и определяют результирующий модуль вектора тока, который раскладывают на высокочастотные и низкочастотные вейвлет-коэффициенты, и, используя высокочастотные вейвлет-коэффициенты, определяют интегральную оценку, по отклонению которой от допустимой зоны работы асинхронного электродвигателя судят о состоянии электродвигателя: если полученная интегральная оценка не входит в допустимую зону порогового значения, то делают вывод о неисправности асинхронного электродвигателя.
| RU 2009143292 A, 27.05.2011 | |||
| Сушилка для сутки топлива | 1927 |
|
SU21034A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1979 |
|
SU1037403A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2143121C1 |

