Изобретение относится к области разработки систем управления и контроля беспилотных летательных аппаратов и может применяться как в составе систем управления непосредственно на борту малого БПЛА, так и в составе удаленных систем управления, формирующих управляющее воздействие по каналам телеметрии.
Известен способ технического контроля и диагностирования бортовых систем беспилотного летательного аппарата с поддержкой принятия решений и комплекс контрольно-проверочной аппаратуры с интеллектуальной системой поддержки принятия решений для его осуществления (патент RU №2557771 МПК G05B 23/00, опубликованный 27.07.2015). Данный способ заключается в классификации значений критичных параметров контроля, характеризующих критичные составные части бортовой системы БПЛА по качественному признаку, с присвоением каждому параметру качественной оценки для выявления предотказных состояний бортовой системы (БС) БПЛА и проведения упреждающего диагностирования, и формированием оптимальных последовательностей проведения диагностирования в виде ранжированных списков прецедентов трех уровней. Способ включает в себя использование блока экспертных знаний, библиотеки прецедентов и байесовской сети доверия для поиска неисправностей. Недостатком способа является то, что его реализация предполагает проверку комплекса средств БПЛА через системы телеметрии с формированием рекомендаций для принятия решений лицом, принимающим решение, и не предполагает возможности использования результатов диагностики для формирования управляющих воздействий бортовой системой управления БПЛА.
Недостатком формирования возможных диагнозов отказов летательного аппарата без возможности автономного использования результата диагностики на борту БПЛА обладают и другие известные способы поиска неисправностей летательных аппаратов: в частности, способ интеллектуальной системы поиска неисправностей на самолете (патент RU №2680945 МПК G05B 19/4065, опубликованный 17.08.2019), а также интеллектуальная система технического обслуживания для самолета(патент RU №2729110МПК G05B 19/4065, опубликованный 04.08.2020), а также способ и прогностическая система обнаружения отказов узлов БПЛА предложенная компанией AmazonTechnologiesInc (патент US №9944404МПК B64D45/00, опубликованный17.04.2018) предполагающие формирование диагноза только по каналам телеметрии.
Известен также способ идентификации неисправностей беспилотных летательных аппаратов на основе квантовой нейронной сети (патент CN №109606730МПК B64F5/60, опубликованный 17.11.2020). Недостатком данного технического решения является его узкая специализация. Система, реализующая предложенный способ идентификации неисправностей БПЛА предназначена для контроля неисправностей трёхфазного двигателя БПЛА и не предполагает возможности диагностирования других узлов.
Известен способ обнаружения неисправностей в полете беспилотного летательного аппарата (патент CN №113514109МПК B64F5/60, опубликованный 19.10.2021), по которомуполучают параметры полета в режиме реального времени и выполняют оценку превышения параметров полета заданного порогового диапазона с использованием нейросетевой модели. Этот способ предполагает контроль непосредственно по времени полета и выявление отклонения с привязкой к летной программе. Недостатком способа является то, что он не позволяет без дополнительного обучения переиспользовать модель при изменении летного задания.
Задача изобретения – расширение возможностей контроля параметров технического состояния узлов малого БПЛА и их диагностики в ходе эксплуатации.
Технический результат – повышение эффективности контроля БПЛА за счет определения отклонений параметров систем малого БПЛА от ожидаемых значений и выявления отказавшей системы, причины и типа отказа, а также предотказных состояний.
Поставленная задача решается, а технический результат достигается тем, что в предложенном способепо информации о значениях параметров работы за определенный промежуток времени, предшествующий текущему, и актуальным управляющим воздействиям на исполнительные механизмы беспилотного летательного аппарата, эталонной моделью на основе комбинированной нейронной сети, состоящей из сверточных слоев для сжатия информации и рекуррентных слоев с управляемыми блоками для кодирования временной зависимости параметров, определяют взаимосвязь параметров, формируют ожидаемое значение параметров и выполняют оценку отклонения актуального значения параметра или комбинации параметров от эталонной модели с последующей классификацией неисправностей, приведшей к превышению порогового значения отклонения, с использованием интеллектуального классификатора для определения отказавшей системы, причины и типа отказа.
Согласно изобретению, оперативный контроль можно осуществить на борту малого беспилотного летательного аппарата в процессе его полета с использованием результатов классификации возможных отказов для формирования управляющих воздействий системой автопилота летательного аппарата.
Согласно изобретению, по сформированному ожидаемому значения контролируемого параметра или совокупности параметров узлов малого беспилотного летательного аппарата можно проводить оценку текущего наличия отказов узлов, а также определять предаварийные состояния узлов беспилотного летательного аппарата.
Для реализации эталонной модели взаимосвязи параметров в виде комбинированной нейронной сети используется оригинальная нейросетевая архитектура CompactNeuroUAV, состоящая из сверточных слоев (CNN–ConvolutionalNeuralNetwork) для сжатия информации идвунаправленных рекуррентных слоев с управляемыми блоками (GRU–GateRecurrentUnit) для кодирования временной зависимости параметров, формирующая ожидаемое значение параметров и дополняемая полносвязным слоем для определения конкретных видов отказов и предаварийных состояний узлов.
Сущность изобретения поясняется графическими материалами:
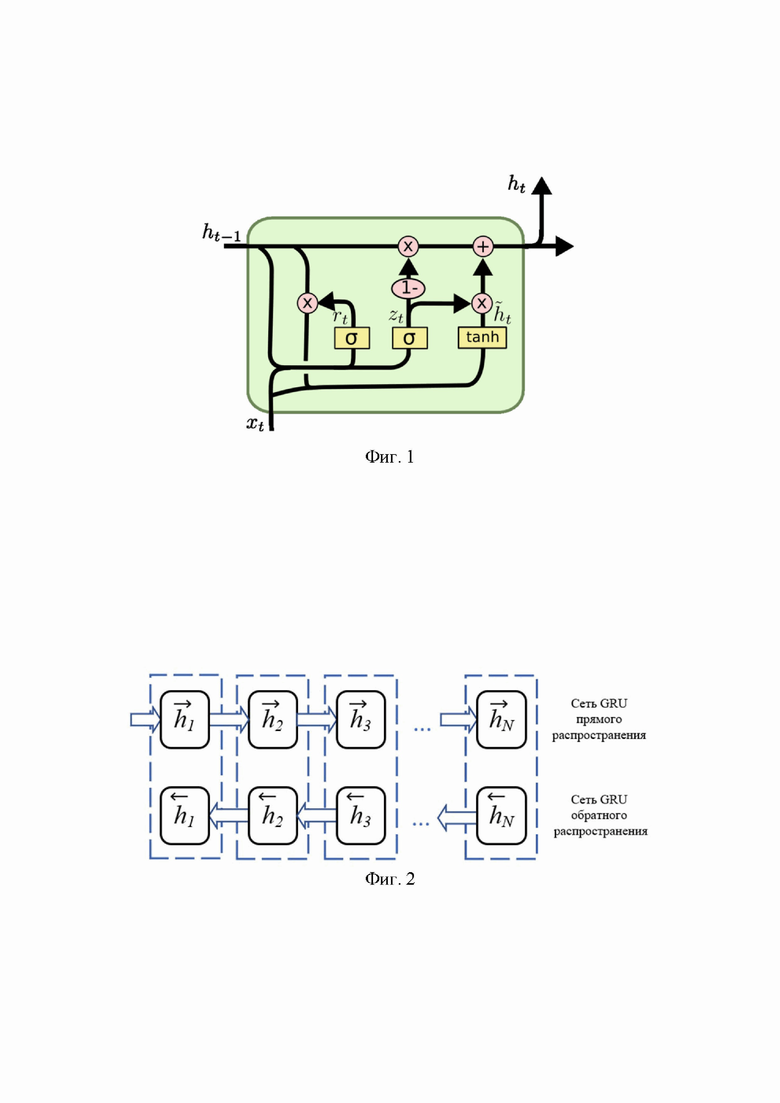
- на фиг. 1 представлена графическая схема единичного блока GRU;
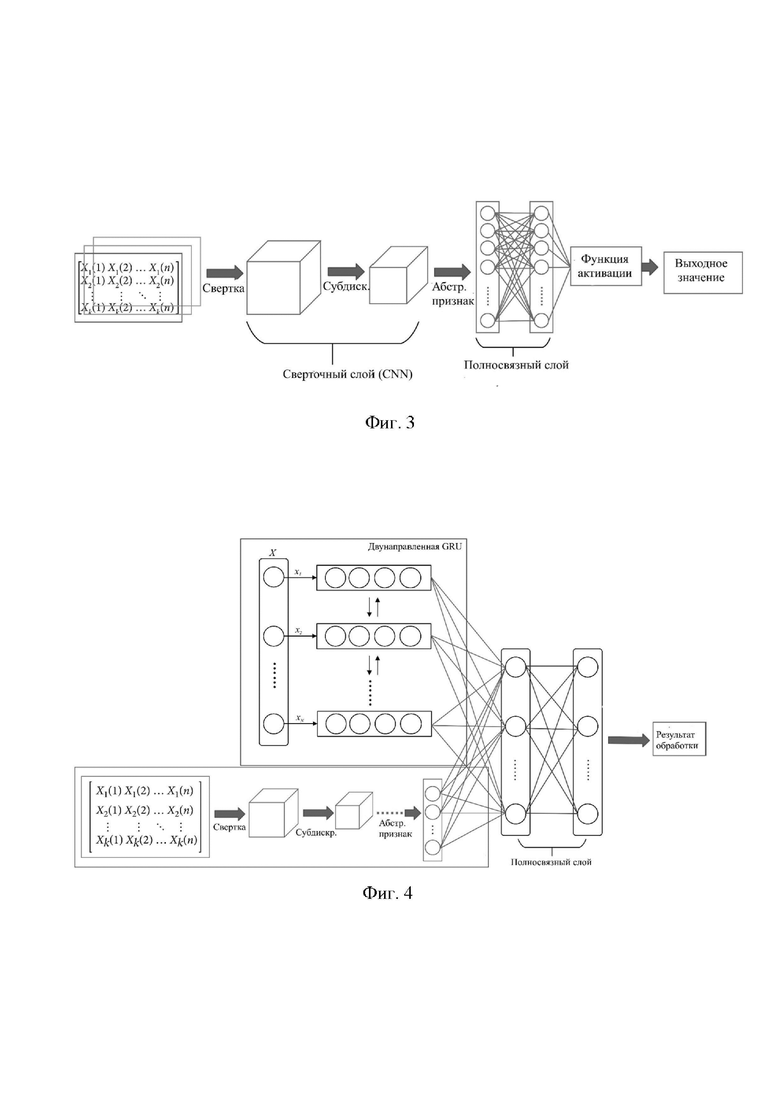
- на фиг. 2 представлена схема двунаправленной сети, состоящей из блоков GRU и используемой в составе нейросетевой архитектуры CompactNeuroUAV для кодирования временной зависимости параметров;
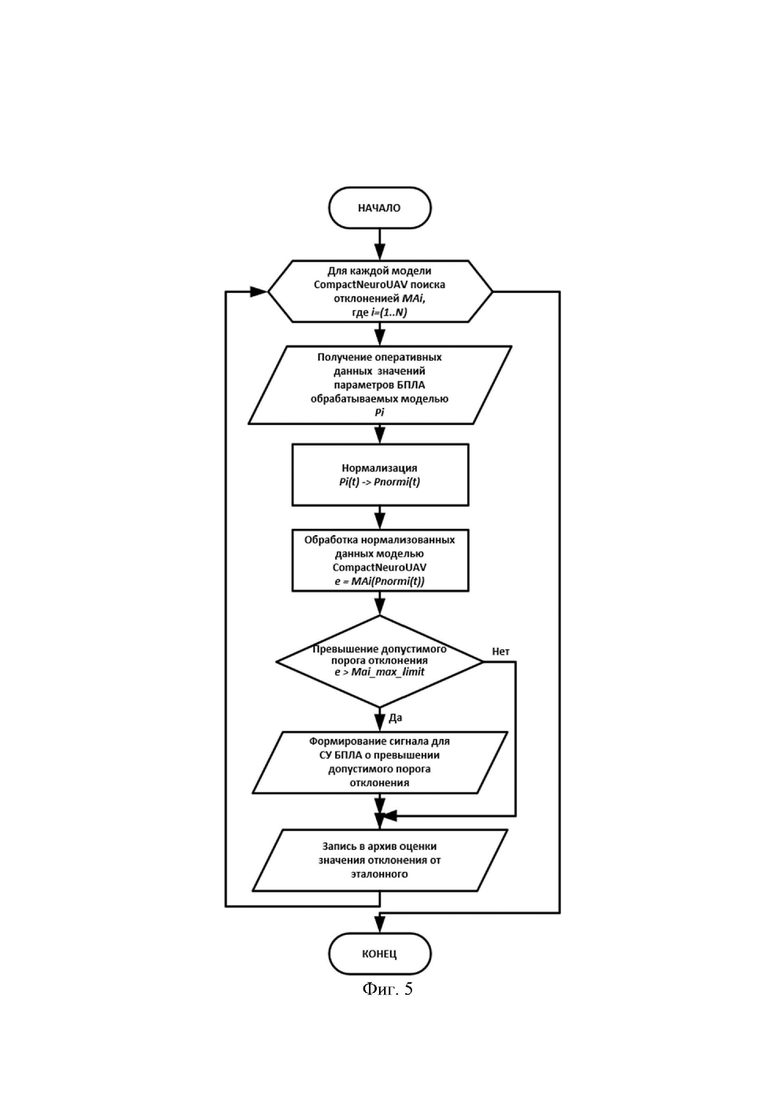
- на фиг. 3 представлена схема сверточной нейронной сети (CNN), выполняющей сжатие информации;
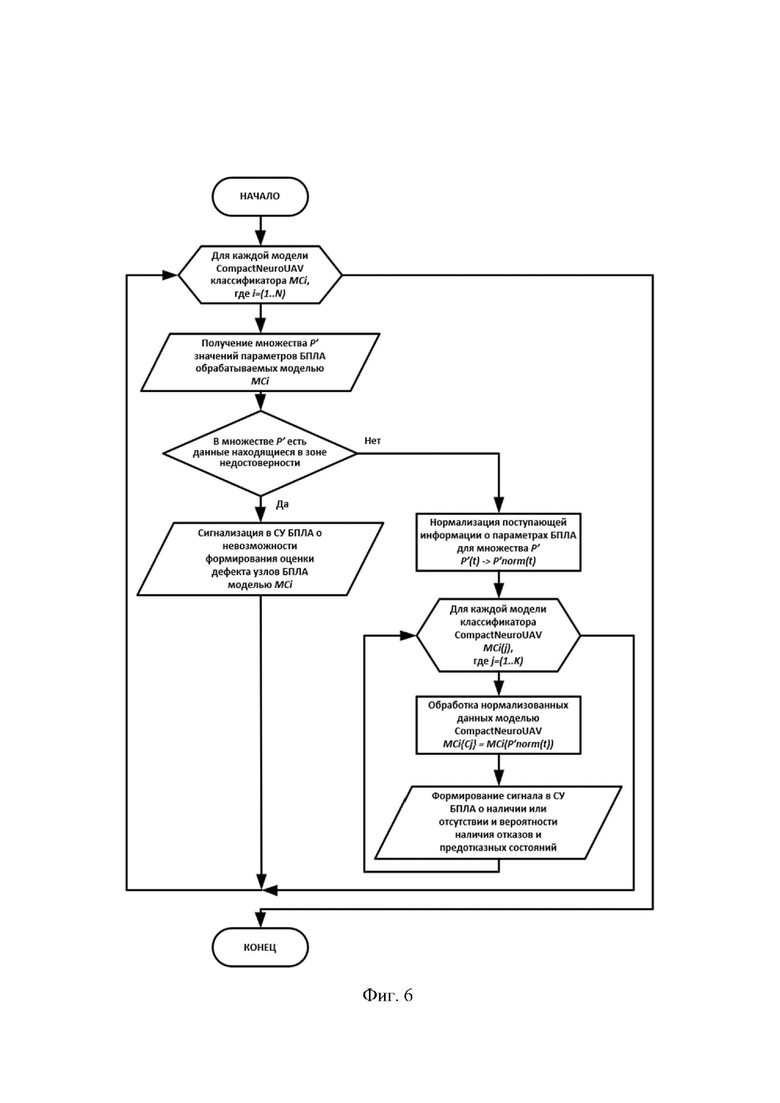
- на фиг. 4 представлена общая схема предлагаемой архитектуры CompactNeuroUAV;
- на фиг. 5 представлена блок-схема алгоритма обработки информации о параметрах работы БПЛА в режиме реального времени, формирующая оценку отклонения параметров от ожидаемых эталонных значений;
- на фиг. 6 представлена блок схема алгоритма выявления отказов и предотказных состояний узлов БПЛА.
Графическая схема единичного блока GRU в составе предложенной архитектуры (фиг. 1), выполняет обработку значений вектора параметров согласно системе уравнений



Здесь xt – входной вектор,ht – выходной вектор, zt – вектор вентиля обновления, rt – вектор вентиля сброса, W, U, b – параметрические матрицы и вектор.
Двунаправленная сеть, состоящая из блоков GRU (фиг. 2),предназначена для кодирования вектора значений, полученных в дискретные моменты времени.
Обработка входной информации о параметрах БПЛА CNN-сетью (фиг. 3) позволяет сформировать обобщенный абстрактный признак для нескольких параметров. Множества двумерных пространственно-временных матриц укладываются в блоки трехмерных матриц, а затем к этим блокам применяется операция свертки. Итогом операции свертки является получение высоко абстрактного признака, и после операции свертки результаты операции свертки обрабатываются отдельным слоем с операцией субдискретизации.
Подготовка диагностической модели предлагаемой архитектуры CompactNeuroUAV (фиг. 4) выполняется на основе обработки предварительно собранной базы данных, содержащей сведения о регистрируемых параметрах бортовой системой управления и неисправностях в ходе полетов БПЛА. Формирование эталонной модели взаимосвязи параметров выполняется по максимальной частоте дискретизации регистрируемых параметров с нормализацией значений в диапазоне [0, 1] и последующим заполнением пропущенных значений во временном ряду методом линейной интерполяции, после чего выполняется фиксация эталонной модели взаимосвязи фиксируемых параметров путем обучения нейронных сетей по полученному набору данных. Для оптимизации объема вычислительных операций, требуемых для выявления отклонений в параметрах и выявления предотказных состояний, используется субдискретизация фиксируемой информации CNN.
Для фиксации взаимосвязи значений параметра по времени и оценки накопительного характера возникновения неисправностей используется слой GRU, количество блоков которого определяется количеством дискретных значений во временном интервале в процессе обучения эталонной модели с ограничением нижнего интервала временного диапазона значением соответствующим минимальной частоте дискретизации параметров БПЛА, отобранных для реализации модели.
Выходными значениями эталонной модели являются:
– оценка отклонения ожидаемого значения единичного параметра с указанием величины отклонения, рассчитываемой путем приведения нормализованного значения параметра к диапазону измерения параметра;
– оценка отклонения совокупности параметров с указанием отклонения в процентах от нормализованного значения ожидаемой совокупности параметров;
– выходное значение классификатора неисправностей, представляющее собой один из возможных видов с указанием расчётной вероятности наличия этого класса неисправности.
Таким образом, реализация предложенного способа оперативного контроля параметров и диагностики технического состояния узлов беспилотного летательного аппарата осуществляется в виде последовательности следующих операций:
Подготовка обучающей информации – использование архивных сведений о параметрах и отказах узлов БПЛА в ходе полетов с нормализацией и приведением к максимальной частоте обработки
Обучение нейронной сети предложенной архитектуры CompactNeuroUAV с формированием требуемого целевого значения:
Оценка отклонения единичного параметра от ожидаемого
Оценка отклонения совокупности параметров
Оценка наличия и вероятности наличия отказа или предотказного состояния
Валидация разработанных моделей
Интеграция разработанных моделей с системой управления БПЛА для формирования оценки отклонения параметра от ожидаемого эталонного значения (фиг. 5), и выявления отказов и предотказных состояний (фиг. 6).
ПРИМЕР КОНКРЕТНОЙ РЕАЛИЗАЦИИ СПОСОБА
Проверка предложенного способа проведена на имитационной модели с использованием экспериментального набора данных, полученного для БПЛА самолетного типа Carbon Z T-28, имеющего следующую компоновку:
- размах крыла 2 метра,
- электродвигатель в передней части,
- элероны,
- флапероны (элероны-закрылки),
- руль высоты,
- руль направления.
Для имитации аварии в различных узлах БПЛА при сборе экспериментальных данных полетов использована модифицированная система управления, позволяющая реализовать следующие виды отказов при полете самолета в режиме автопилота:
1. полный отказ двигателя (отключение двигателя);
2. отказ руля высоты с застреванием в горизонтальном положении;
3. отказ руль направления с застреванием руля в крайнем правом, крайнем левом или среднем положении;
4. отказ элеронов с имитацией застревания правого элерона, левого элерона или обоих элеронов в горизонтальном положении.
Файлы набора экспериментальных полетных данных (httрs://thеairlab.оrg/alfa-datasеt/) размечены таким образом, чтобы они содержали только данные о полетах в режиме автопилота и включали достоверные данные об отказах только в случае фактического наличия какой-либо имитируемой неисправности. Каждый файл содержит данные для полетов не более чем с одной неисправностью. В качестве значений контролируемых параметров, применяемых для оценки технологического состояния узлов БПЛА, использованы данные о положении БПЛА с GPS-приёмника, об измеренных датчиками фактических и заданных автопилотом целевых значениях крена, тангажа, скорости, рыскания, локальном состоянии узлов и общая оценка состояния БПЛА.
В таблице 1 представлен общий сводный перечень имитируемых типов неисправностей и длительность полета БПЛА до возникновения отказа и после его имитации.
Таблица 1 Типы имитируемых отказов БПЛА самолетного типа
Для реализации предложенного способа оперативного контроля параметров и диагностики технического состояния узлов беспилотного летательного аппарата выполнена следующая последовательность действий:
Выполнена разметка экспериментальных данных временных рядов:
данные экспериментальных полетов разбиты на временные интервалы длительностью 1 секунда, для сигналов с частотой дискретизации меньше максимальной 25 Гц выполнено дополнение набора данных путем линейной интерполяции
для каждого интервала из пункта 1.а выполнена маркировка наличия конкретных видов неисправностей с присвоением метки, характеризующей наличие неисправности: полет без неисправности, полет с неисправностью, переходной интервал проявления неисправности. Подбор переходных интервалов осуществлен таким образом, чтобы момент начала имитации неисправности попадал на разные участки интервала
полученный набор интервалов разделен на обучающую (40%), кросс-валидационную (10%) и тестовую (50%) выборки. Разбиение выполнено с учетом принадлежности интервала к определенному типу (таблица 1) и метке неисправности (пункт 1.b)
Выполнена нормализация полученных на этапе 1 временных рядов по диапазону измеряемого значения параметра для величин положения БПЛА с GPS-приёмника, об измеренных датчиками фактических и заданных автопилотом целевых значениях крена, тангажа, скорости, рыскания.
Проведена процедура обучения глубоких нейросетевых моделей предложенной архитектуры CompactNeuroUAV с использованием обучающей и кросс-валидационной выборок:
для оценки отклонения единичного параметра величины тангажа от ожидаемого эталонного, учитывающего инерционность реакции исполнительного механизма
для оценки отклонения совокупности параметров значений крена, тангажа, скорости, рыскания от ожидаемого эталонного
модель-классификатор для оценки наличия отказа или предотказного состояния с указанием расчётной вероятности наличия этого класса неисправности
Выполнена проверка обученных моделей на тестовой выборке.
Для модели оценки отклонения величины тангажа от эталонной точность модели на тестовом наборе данных составила 91%.
Для модели оценки отклонения совокупности параметров крена, тангажа, скорости, рыскания от ожидаемого эталонного точность выявления составила 96 %.
Результаты проверки выявления предотказных состояний с указанием доли ложноположительных (ЛП) и ложноотрицательных (ЛО) выявлений отказа или предотказного состояния какого-либо узла БПЛА представлена в таблице 2.
Результат оценки наличия какого-либо класса отказа или предотказного состояния выявлялся по формированию соответствующего выхода модели CompactNeuroUAV с вероятностью не ниже 75%.
Таблица 2: Результаты проверки нейросетевых моделей классификации отказов CompactNeuroUAV на тестовом наборе данных для БПЛА самолетного типа Carbon Z T-28
Проведение оперативного контроля параметров и диагностики технического состояния параметров узлов беспилотного летательного аппарата (БПЛА), в соответствии с предложенным способом позволяет:
1) оперативно определять отказы узлов БПЛА, типы отказов и предотказные состояния;
2) оперативно выявлять отклонение параметров БПЛА от ожидаемого с учетом инерционности исполнительных механизмов;
3) формировать компенсирующее управляющее воздействие при выявлении существенного отклонения параметра непосредственно на борту БПЛА при использовании компактных бортовых нейроускорителей;
4) использовать выявленные предотказные состояния при формировании управляющих программ системы управления БПЛА для принятия решений.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМИТАЦИОННАЯ МОДЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ ВОЗДУШНОЙ МИШЕНЬЮ НА ОСНОВЕ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ИЗ СОСТАВА МИШЕННОГО КОМПЛЕКСА | 2020 |
|
RU2782035C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2240588C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2562890C2 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПО РЕЗУЛЬТАТАМ ЛЕТНЫХ ИСПЫТАНИЙ | 1994 |
|
RU2124711C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2409504C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2390815C1 |
Изобретение относится к способу оперативного контроля параметров и диагностики технического состояния узлов малого беспилотного летательного аппарата. Для проведения оперативного контроля за определенный период времени использования БПЛА с контролем актуальных управляющих воздействий на его исполнительные механизмы определяют взаимосвязь полученных параметров работы БПЛА с помощью эталонной модели на основе комбинированной нейронной сети, состоящей из сверточных слоев для сжатия информации и рекуррентных слоев с управляемыми блоками для кодирования временной зависимости параметров, формируют ожидаемое значение параметров и выполняют оценку отклонения актуального значения параметра или комбинации параметров от эталонной модели с последующей классификацией неисправностей, приведшей к превышению порогового значения отклонения, с использованием интеллектуального классификатора для определения отказавшей системы, причины и типа отказа. Обеспечивается оперативность определения отказов и отклонений параметров, возможность формировать компенсирующие управляющие воздействия на борту БПЛА. 2 з.п. ф-лы, 2 табл., 6 ил.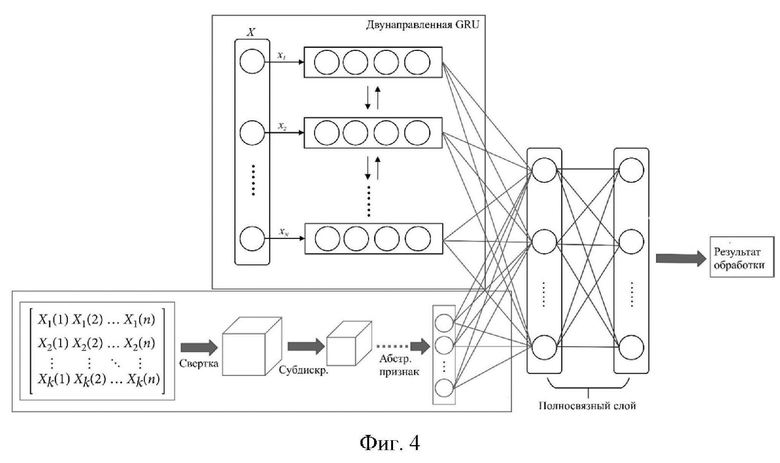
1. Способ оперативного контроля параметров и диагностики технического состояния узлов малого беспилотного летательного аппарата, при котором по информации о значениях параметров работы за определенный промежуток времени, предшествующий текущему, и актуальным управляющим воздействиям на исполнительные механизмы беспилотного летательного аппарата, эталонной моделью на основе комбинированной нейронной сети, состоящей из сверточных слоев для сжатия информации и рекуррентных слоев с управляемыми блоками для кодирования временной зависимости параметров, определяют взаимосвязь параметров, формируют ожидаемое значение параметров и выполняют оценку отклонения актуального значения параметра или комбинации параметров от эталонной модели с последующей классификацией неисправностей, приведшей к превышению порогового значения отклонения, с использованием интеллектуального классификатора для определения отказавшей системы, причины и типа отказа.
2. Способ по п.1, отличающийся тем, что оперативный контроль осуществляют на борту малого беспилотного летательного аппарата в процессе его полета с использованием результатов классификации возможных отказов для формирования управляющих воздействий системой автопилота летательного аппарата.
3. Способ по п.1, отличающийся тем, что по сформированному ожидаемому значению контролируемого параметра или совокупности параметров узлов малого беспилотного летательного аппарата проводят оценку текущего наличия отказов узлов, а также определяют предаварийные состояния узлов беспилотного летательного аппарата.
| Способ определения остаточного ресурса узла транспортного средства | 2015 |
|
RU2612951C1 |
| МЕТОД РЕЗЕРВИРОВАНИЯ КАНАЛОВ КОНСТРУКТИВНО-ФУНКЦИОНАЛЬНЫХ МОДУЛЕЙ БОРТОВЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИНТЕЛЛЕКТУАЛЬНОЙ ДИАГНОСТИЧЕСКОЙ СИСТЕМЫ В УСЛОВИЯХ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2021 |
|
RU2778366C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ РЕМОНТНО-ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС РАКЕТНО-АРТИЛЛЕРИЙСКОГО ВООРУЖЕНИЯ (МРРДК-РАВ) | 2022 |
|
RU2780079C1 |
| СПОСОБ АДАПТИВНОГО ПРОГНОЗИРОВАНИЯ ОСТАТОЧНОГО РЕСУРСА ЭКСПЛУАТАЦИИ СЛОЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2533321C1 |
| CN 105467975 B, 03.08.2018. | |||
